Projects
- Main HomePage
- USBTiny MKii Programmer
- USBTiny MKii User Guide
- Atmega32U2 Breakout Board
- Toaster Oven
- Flash Chip Hack
- Mini ITX
- Misc. Boards
- Datalogger
- Etch Tank
- USB Tiny Programmer
- Using USB Tiny
- Making USB Tiny
- Project Boards
- Intel Atom PC
Atmega AVR
CNC Related
- Linuxcnc MESA Bitfiles Xilinx-14.5
- Linuxcnc MESA Bitfiles Xilinx-9.2
- Sherline CNC
- CNC Power Supply
- New Spindle Pulleys
- CNC Touch Probe
- Local Metal Surplus
Dean Camera's Articles
- Avr Timers
- Avr Interrupts
- EEprom Basics
- PROGMEM Basics
- Programming Methods
- USART Basics
- USART Interrupts
Older projects
Other Links
Other Stuff
Lightseeker Bot
I think my first encounter with robotics started out when a friend introduced me to a Basic Stamp II evaluation board but I don't think I ever built a robot using one. I just used it to test various code and samples I came across on the web. He then turned my attention to the ever popular 16F84 PIC. I have since used them quite a bit as support chips for other processors. My first actual robot is a simple light seeker and it is still probably my favorite. I have modified it a few times and tried different sensors on it but I've shown it below in it's close to original state.
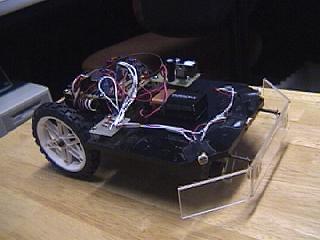
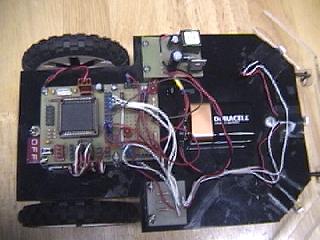
The only sensors on it are the three cds cells on the front and two bumper switches mounted to the front bumper. I'm using a National 5v switcher design powered by a 9v battery on this one and an original 68HC11 based botboard for its brains. The cds cells are still taped to the front, as I never got around to making brackets to mount them. I did however make some pcboards to mount them on and for some reason they didn't work that well. The bumper and switches actually work quite well until it wanders under a kitchen cabinet which it slightly higher than the bumper. At one point I did have a couple of Sharp GP2D05 sensors mounted to the front of it and used them along with the bumper. With them mounted, the bumper switches were rarely triggered.
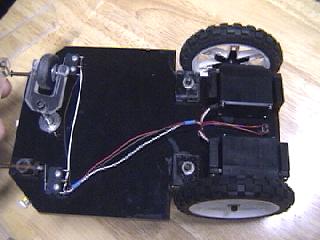
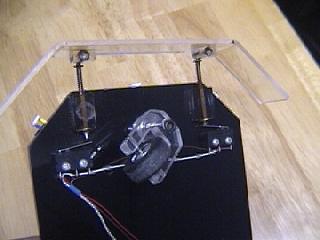
You can see the detail of the bottom side above. The base was cut on my Sherline CNC mill including the servo mounts, which fit into mating slots in the base. The blocks in front of the servos were encoder mounts that I tried at one point. The bumper floats on two spring loaded plungers that activate micro switches. The front wheel was made from a hobby wheel mounted to a bracket I made to fit an old full height IBM floppy drive spindle shaft. I've used this arrangement on a couple of my bots now and it works quite well.


The original rear wheels are from a Lego kit and were mounted to the servos with a standard servo horn. I wrote a program for my CNC that profiled the servo horn into the wheel but it didn't remove much material because except for the hub it was a perfect fit to begin with. Below you can see the original wheel and a wheel I made to use along with the encoders I was testing. The other wheel shows the servo horn profile a bit better than the Lego wheel.

