Projects
- Main HomePage
- USBTiny MKii Programmer
- USBTiny MKii User Guide
- Atmega32U2 Breakout Board
- Toaster Oven
- Flash Chip Hack
- Mini ITX
- Misc. Boards
- Datalogger
- Etch Tank
- USB Tiny Programmer
- Using USB Tiny
- Making USB Tiny
- Project Boards
- Intel Atom PC
Atmega AVR
CNC Related
- Linuxcnc MESA Bitfiles Xilinx-14.5
- Linuxcnc MESA Bitfiles Xilinx-9.2
- Sherline CNC
- CNC Power Supply
- New Spindle Pulleys
- CNC Touch Probe
- Local Metal Surplus
Dean Camera's Articles
- Avr Timers
- Avr Interrupts
- EEprom Basics
- PROGMEM Basics
- Programming Methods
- USART Basics
- USART Interrupts
Older projects
Other Links
Other Stuff
My Larger Robot Page
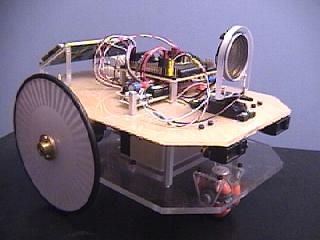
It's not actually that large but larger than my others. The base measures about 7 X 10 with 5" Plexiglas wheels using 3/16" O rings for tires. I'm testing the sonar mounted on the servo right now and shown mounted under the front are 2 Sharp IR sensors.
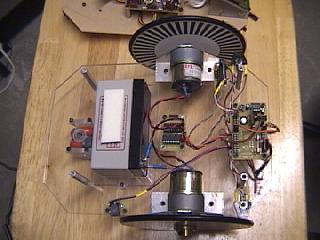
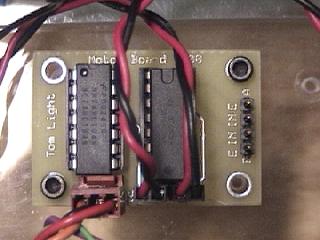
Above you can see the bottom and top layer of my larger robot. I started out using a Botboard II as the main processor with a 16F877 PIC on a slave board to drive the motors and encoders. I wasn't satisfied with the results I was getting using the SPI interface with them so I've replaced them with what you see here. The motors are a pair of Hsiang Neng GH12-1632TI from Jameco. Mounted to the top layer is a Motorola 68332 based MRM from Mark Castelluccio at www.robominds.com along with some odds and ends I'm working on.


I originally was using a front wheel made from the bearing and
spindle shaft out of an old original IBM floppy drive as shown on the
upper right which worked good but I've since replaced it with an omni
wheel which works about the same but is probably a bit more durable.

The hbridge board and power distribution board are mounted to the bottom level. I'm using a TI 754410 hbridge to drive the motors. The board on the right is my power distribution board which has +12v in and a regulated +5v and -5v on board. I'm using a National eval 5v switcher board mounted vertically on it with room to put another one beside it. The board will also accept regular 7805 regulators as an alternative. To the right of the switcher is an ICL7660 I'm using for the negative voltage for the contrast on my LCD.