Projects
- Main HomePage
- USBTiny MKii Programmer
- USBTiny MKii User Guide
- Atmega32U2 Breakout Board
- Toaster Oven
- Flash Chip Hack
- Mini ITX
- Misc. Boards
- Datalogger
- Etch Tank
- USB Tiny Programmer
- Using USB Tiny
- Making USB Tiny
- Project Boards
- Intel Atom PC
Atmega AVR
CNC Related
- Linuxcnc MESA Bitfiles Xilinx-14.5
- Linuxcnc MESA Bitfiles Xilinx-9.2
- Sherline CNC
- CNC Power Supply
- New Spindle Pulleys
- CNC Touch Probe
- Local Metal Surplus
Dean Camera's Articles
- Avr Timers
- Avr Interrupts
- EEprom Basics
- PROGMEM Basics
- Programming Methods
- USART Basics
- USART Interrupts
Older projects
Other Links
Other Stuff
Newbie's Guide to AVR Timers
 Copyright © Dean Camera
Copyright © Dean Camera
Reprinted with permission, 2011
At last! Yet another tutorial, this one covering a topic which is the main
source of frustration to those new with AVRs; timers. What are they, and what
can they do for us?
Introduction
- The AVR Timer
The timer systems on the AVR series of Microcontrollers are complex beasts. They
have a myriad of uses ranging from simple delay intervals right up to complex
PWM (more on this later) generation. However, despite the surface complexity,
the function of the timer subsystem can be condensed into one obvious function:
to time.
We use timers every day - the most simple one can be found on your wrist. A
simple clock will time the seconds, minutes and hours elapsed in a given day -
or in the case of a twelve hour clock, since the last half-day. AVR timers do a
similar job, measuring a given time interval.
The AVR timers are very useful as they can run asynchronous to the main AVR
core. This is a fancy way of saying that the timers are separate circuits on the
AVR chip which can run independent of the main program, interacting via the
control and count registers, and the timer interrupts. Timers can be configured
to produce outputs directly to pre-determined pins, reducing the processing load
on the AVR core.
One thing that trips those new to the AVR timer is the clock source. Like all
digital systems, the timer requires a clock in order to function. As each clock
pulse increments the timer's counter by one, the timer measures intervals in
periods of one on the input frequency:
Code:
This means the smallest amount of time the timer can measure is one period of
the incoming clock signal. For instance, if we supply a 100Hz signal to a timer,
our period becomes:
Code:
Timer Resolution = (1 / 100)
Timer Resolution = .01 seconds
For the above example, our period becomes .01 seconds - so our timer will
measure in multiples of this. If we measure a delay to be 45 timer periods, then
our total delay will be 45 times .01 seconds, or .45 seconds.
For this tutorial, I will assume the target to be a MEGA16, running at at 1MHz
clock. This is a nicely featured AVR containing certain timer functionality
we'll need later on. As modern AVRs come running off their internal ~1MHz RC
oscillator by default, you can use this without a problem (although do keep in
mind the resultant timing measurements will be slightly incorrect due to the RC
frequency tolerance).
In the sections dealing with toggling a LED, it is assumed to be connected to
PORTB, bit 0 of your chosen AVR (pin 1 of DIP AVRMEGA16).
To start off, we will deal with basic timer functionality and move on from
there.
Part One -
Timers running at Fcpu
We'll start with a simple example. We'll create a simple program to flash a LED
at about 20Hz. Simple, right?
First, let's look at the pseudo-code required to drive this example:
Code:
Set up timer
WHILE forever
IF timer value IS EQUAL TO OR MORE THAN 1/20 sec THEN
Reset counter
Toggle LED
END IF
END WHILE
Very simple. We're just starting out, so we'll use the polled method of
determining the elapsed time - we'll put in an IF statement in our code to check
the current timer value, and act on it once it reaches (or exceeds) a certain
value. Before we start on the timer stuff, let's create the skeleton of our
project:
Code:
int main (void)
{
// TODO: Set up LED hardware
// TODO: Set up timer
for (;;)
{
// TODO: Check timer value, reset and toggle LED when count matches 1/20 of a second
}
}
Extremely simple. I'm going to assume you are familiar with the basics of
setting up AVR ports as well as bit manipulation (if you're uncertain about the
latter, refer to this
excellent tutorial). With that in mind, I'll add in the LED-related code and
add in the IF statement:
Code:
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
// TODO: Set up timer
for (;;)
{
// TODO: Check timer value in if statement, true when count matches 1/20 of a second
if ()
{
PORTB ^= (1 << 0); // Toggle the LED
// TODO: Reset timer value
}
}
}
Now we need to start dealing with the timer. We want to do nothing more than
start it at 1MHz, then check its value later on to see how much time has
elapsed. We need to deviate for a second and learn a little about how the timer
works in its most basic mode.
The AVR timer circuits come in two different widths, 8 and 16 bit. While the
capabilities of the two timer types differ, at the most basic level (simple
counting), the only difference is the maximum amount of time the timer can count
to before overflowing and resetting back to zero. Those familiar with C will
know that an unsigned eight bit value can store a value from 0 to (2^8 - 1), or
255, before running out of bits to use and becoming zero again. Similarly, an
unsigned 16 bit value may store a value from 0 to (2^16 - 1), or 65535 before
doing the same.
As the name suggests, an 8 bit timer stores its value as an eight bit value in
its count register, while the 16 bit timer stores its current count value in a
pair of eight bit registers. Each advancement of the counter register for any
AVR timer indicates that one timer period has elapsed.
Our project needs a fairly long delay, of 1/20 of a second. That's quite short
to us humans, but to a microcontroller capable of millions of instructions per
second it's a long time indeed!
Our timer will be running at the same clock speed as the AVR core to start with,
so we know that the frequency is 1MHz. One Megahertz is 1/1000000 of a second,
so for each clock of the timer only one millionth of a second has elapsed! Our
target is 1/20 of a second, so let's calculate the number of timer periods
needed to reach this delay:
Code:
= (1 / 20) / (1 / 1000000) - 1
= .05 / 0.000001 - 1
= 50000 - 1
= 49999
So running at 1MHz, our timer needs to count to 49999 before 1/20th of a second
has elapsed - the normal calculated value is decremented by one, as the 0th
count of the timer still takes one tick. That's a very large value - too large
for an 8 bit value! We'll need to use the 16 bit timer 1 instead.
Firstly, we need to start the timer at the top of our main routine, so that it
will start counting. To do this, we need to supply the timer with a clock; as
soon as it is clocked it will begin counting in parallel with the AVR's CPU core
(this is called synchronous operation). To supply a clock of Fcpu to the timer 1
circuits we need to set the CS10 bit (which selects a Fcpu prescale of 1 - more
on that later) in the TCCR1B, the Timer 1 Control Register B.
Code:
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TCCR1B |= (1 << CS10); // Set up timer
for (;;)
{
// TODO: Check timer value in if statement, true when count matches 1/20 of a second
if ()
{
PORTB ^= (1 << 0); // Toggle the LED
// TODO: Reset timer value
}
}
}
Now, with only one line of code, we've started the hardware timer 1 counting at
1MHz - the same speed as our AVR. It will now happily continue counting
independently of our AVR. However, at the moment it isn't very useful, we still
need to do something with it!
We want to check the timer's counter value to see if it reaches 1/20 of a
second, or a value of 49999 at 1MHz as we previously calculated. The current
timer value for timer 1 is available in the special 16-bit register, TCNT1. In
actual fact, the value is in two 8-bit pair registers TCNT1H (for the high byte)
and TCNT1L (for the low byte), however the C library implementation we're using
helpfully hides this fact from us.
Let's now add in our check to our code - it's as simple as testing the value of
TCNT1 and comparing against our wanted value, 49999. To prevent against missed
compares (where the timer updates twice between checks so our code never sees
the correct value), we use the equal to or more than operator,
">=".
Code:
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TCCR1B |= (1 << CS10); // Set up timer
for (;;)
{
// Check timer value in if statement, true when count matches 1/20 of a second
if (TCNT1 >= 49999)
{
PORTB ^= (1 << 0); // Toggle the LED
// TODO: Reset timer value
}
}
}
Great! We've only got one more line of code to write, to reset the timer value.
We already know the current value is accessed via the TCNT1 register for Timer
1, and since this is a read/write register, we can just write the value 0 to it
once our required value is reached to rest it.
Code:
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TCCR1B |= (1 << CS10); // Set up timer
for (;;)
{
// Check timer value in if statement, true when count matches 1/20 of a second
if (TCNT1 >= 49999)
{
PORTB ^= (1 << 0); // Toggle the LED
TCNT1 = 0; // Reset timer value
}
}
}
And there we have it! We've just created a very basic program that will toggle
our LED every 1/20 of a second at a 1MHz clock. Testing it out on physical
hardware should show the LED being dimmer than normal (due to it being pulsed
quickly). Good eyesight might reveal the LED's very fast flickering.
Next, we'll learn about the prescaler so we can try to slow things down a bit.
Part Two -
Prescaled Timers
In part one of this tutorial we learned how to set up our 16-bit timer 1 for a
1/20 second delay. This short (to us humans) delay is actually quite long to our
AVR - 50,000 cycles in fact at 1MHz. Notice that Timer 1 can only hold a value
of 0-65535 - and we've almost reached that! What do we do if we want a longer
delay?
One of the easiest things we can do is to use the timer's prescaler, to trade
resolution for duration. The timer prescaler is a piece of timer circuitry which
allows us to divide up the incoming clock signal by a power of 2, reducing the
resolution (as we can only count in 2^n cycle blocks) but giving us a longer
timer range.
Let's try to prescale down our Fcpu clock so we can reduce the timer value and
reduce our delay down to a nice 1Hz. The Timer 1 prescaler on the MEGA16 has
divide values of 1, 8, 64, 256 and 1024 - so let's re-do our calculations and
see if we can find an exact value.
Our calculations for our new timer value are exactly the same as before, except
we now have a new prescaler term. We'll look at our minimum resolution for each
first:
Code:
= (Prescale / Input Frequency)
For a 1MHz clock, we can construct a table of resolutions using the available
prescaler values and a Fcpu of 1MHz.
Code:
1 | 1uS
8 | 8uS
64 | 64uS
256 | 256uS
1024 | 1024uS
If you recall our equation for calculating the timer value for a particular
delay in part 1 of this tutorial, you'll remember it is the following:
Code:
However, as we've just altered the prescaler term, the latter half is now
different. Substituting in our new resolution equation from above we get:
Code:
Or rearranged:
Code:
Now, we want to see if there is a prescaler value which will give an *exact*
delay of 1Hz. One Hertz is equal to one cycle per second, so we want our compare
value to be one second long, or 1000000uS. Let's divide that by each of our
resolutions and put the results in a different table:
Code:
1 | 999999
8 | 125000
64 | 15624
256 | 3905.25
1024 | 975.5625
The results are interesting. Of the available prescaler values, we can
immediately discount 256 and 1024 - they do not evenly divide into our wanted
delay period. They are of course usable, but due to the rounding of the timer
count value the resultant delay will be slightly over or under our needed delay.
That leaves us with three possible prescales; 1, 8 and 64.
Our next task is to remove the values that aren't possible. On an 8-bit timer,
that means discounting values of more than (( 2 ^ 8 ) - 1), or 255, as the value
won't fit into the timer's 8-bit count register. For our 16-bit timer, we have a
larger range of 0 to ((2 ^ 16) - 1), or 65535. Only one of our prescaler values
satisfies this requirement - a prescale of 64 - as the other two possibilities
require a timer count value of more bits than our largest 16-bit timer is
capable of storing.
Let's go back to our original timer program and modify it to compare against our
new value of 15624, which we've found to be 1 second at a prescale of 64 and a
Fcpu of 1MHz:
Code:
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
// TODO: Set up timer at Fcpu/64
for (;;)
{
// Check timer value in if statement, true when count matches 1 second
if (TCNT1 >= 15624)
{
PORTB ^= (1 << 0); // Toggle the LED
TCNT1 = 0; // Reset timer value
}
}
}
Note I've removed the timer setup line, as it is no longer valid. We want to set
up our timer to run at Fcpu/64 now. To do this, we need to look at the datasheet
of the MEGA16 to see which bits need to be set in which control registers.
Checking indicates that we need to set both the CS10 and CS11 prescaler bits in
TCCR1B, so let's add that to our program:
Code:
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Set up timer at Fcpu/64
for (;;)
{
// Check timer value in if statement, true when count matches 1 second
if (TCNT1 >= 15624)
{
PORTB ^= (1 << 0); // Toggle the LED
TCNT1 = 0; // Reset timer value
}
}
}
Compile it, and we're done! Remembering that our timer runs as soon as it gets a
clock source, our program will now work, flashing the LED at a frequency of 1Hz.
Part Three
- Long Timer Delays in Firmware
So far, we've learned how to use the timers in their most basic counting mode to
delay a specified duration. However, we've also discovered a limitation of the
timers - their maximum duration that their timer count registers can hold. We've
managed to get a 1Hz delay out of a prescaled 16-bit timer with a prescale, but
what if we want a delay of a minute? An hour? A week or year?
The answer is to create a sort of prescaler of our own in software. By making
the hardware timer count to a known delay - say the 1Hz we created earlier - we
can increment a variable each time that period is reached, and only act after
the counter is reached a certain value. Let's pseudocode this so we can get a
better understanding of what we want to do:
Code:
Set up timer
Initialise counter to 0
WHILE forever
IF timer value IS EQUAL TO 1 sec THEN
Increment counter
Reset timer
IF counter value IS EQUAL TO 60 seconds THEN
Toggle LED
END IF
END IF
END WHILE
The above pseudocode will build on our last experiment - a timer with a one
second count - to produce a long delay of one minute (60 seconds). It's very
simple to implement - all we need extra to our last example is an extra IF
statement, and a few variable-related lines. First off, we'll re-cap with our
complete code as it stands at the moment:
Code:
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Set up timer at Fcpu/64
for (;;)
{
// Check timer value in if statement, true when count matches 1 second
if (TCNT1 >= 15624)
{
PORTB ^= (1 << 0); // Toggle the LED
TCNT1 = 0; // Reset timer value
}
}
}
We need some code to create and initialise a new counter variable to 0, then
increment it when the counter reaches one second as our pseudocode states. We
also need to add in a test to see if our new variable reaches the value of 60,
indicating that one minute has elapsed.
Code:
int main (void)
{
// TODO: Initialise a new counter variable to zero
DDRB |= (1 << 0); // Set LED as output
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Set up timer at Fcpu/64
for (;;)
{
// Check timer value in if statement, true when count matches 1 second
if (TCNT1 >= 15625)
{
TCNT1 = 0; // Reset timer value
// TODO: Increment counter variable
// TODO: Check here to see if new counter variable has reached 60
if ()
{
// TODO: Reset counter variable
PORTB ^= (1 << 0); // Toggle the LED
}
}
}
}
Now that we have our new program's structure, replacing the TODOs becomes very
simple. We want a target count of 60, which is well within the range of an
unsigned integer variable, so we'll make our counter variable of type unsigned
integer. The rest of the code is extremely simple, so I'll add it all in at
once:
Code:
int main (void)
{
unsigned char ElapsedSeconds = 0; // Make a new counter variable and initialise to zero
DDRB |= (1 << 0); // Set LED as output
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Set up timer at Fcpu/64
for (;;)
{
// Check timer value in if statement, true when count matches 1 second
if (TCNT1 >= 15624)
{
TCNT1 = 0; // Reset timer value
ElapsedSeconds++;
if (ElapsedSeconds == 60) // Check if one minute has elapsed
{
ElapsedSeconds = 0; // Reset counter variable
PORTB ^= (1 << 0); // Toggle the LED
}
}
}
}
Compile and run, and the LED should toggle once per minute. By extending this
technique, we can produce delays of an arbitrary duration. One point of interest
is to note that any timing errors compound - so if the timer input frequency is
1.1MHz rather than 1.0MHz our one minute timer will be sixty times that small
error out in duration. For this reason it is important to ensure that the
timer's clock is as accurate as possible, to reduce long-term errors as much as
possible.
Part Four
- The CTC Timer Mode
Up until now, we've been dealing with the timers in a very basic way - starting
them counting, then comparing in our main routine against a wanted value. This
is rather inefficient - we waste cycles checking the timer's value every time
the loop runs, and slightly inaccurate (as the timer may pass our wanted compare
value slightly while processing the loop). What if there was a better way?
Well, there is. The AVR timers usually incorporate a special function mode
called "Clear on Timer Compare", or CTC for short. The CTC operating
mode does in hardware what we've previously experimented in software; it
compares in hardware the current timer value against the wanted value, and when
the wanted value is reached a flag in a status register is set and the timer's
value reset.
This is extremely handy; because the comparing is done in hardware, all we have
to worry about is checking the flag to determine when to execute our LED
toggling - much faster than comparing bytes or (in the case of the 16-bit timer)
several bytes.
CTC mode is very straightforward. Before we look into the implementation, let's
pseudocode what we want to do.
Code:
Set up timer in CTC mode
Set timer compare value to one second
WHILE forever
IF CTC flag IS EQUAL TO 1 THEN
Toggle LED
Clear CTC flag
END IF
END WHILE
Very short, and very simple. Note that the name of the mode is Clear
on timer compare - the timer's value will automatically reset each time the
compare value is reached, so we only need to clear the flag when the delay is
reached. This set-and-forget system is very handy, as once the timer is
configured and started we don't need to do anything other than check and clear
its status registers.
Now then, we'll grab our previous example, modifying it to fit with our new
pseudocode:
Code:
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
// TODO: Configure timer mode to CTC
// TODO: Set compare value for a compare rate of 1Hz
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Start timer at Fcpu/64
for (;;)
{
if () // TODO: Check CTC flag
{
PORTB ^= (1 << 0); // Toggle the LED
// TODO: Clear CTC flag
}
}
}
Now, we need to flesh out the skeleton code we have. First up we need to
configure our timer for CTC mode. As you might be able to guess, we want to
configure our timer, thus the bits we want will be located in the timer's
Control registers. The table to look for is the one titled "Waveform
Generation Mode Bit Description", and is located in timer Control register
descriptions for each timer. This table indicates all the possible timer modes,
the bits required to set the timer to use those modes, and the conditions each
mode reacts to.
You should note that our previous examples have ignored this table altogether,
allowing it to use its default value of all mode bits set to zero. Looking at
the table we can see that this setup corresponds to the "Normal" timer
mode. We want to use the CTC mode of the timer, so let's look for a combination
of control bits that will give us this mode.
Interestingly, it seems that two different combinations in Timer 1 of the MEGA16
will give us the same CTC behaviour we desire. Looking to the right of the
table, we can see that the "Top" value (that is, the maximum timer
value for the mode, which corresponds to the compare value in CTC mode) uses
different registers for each. Both modes behave in the same manner for our
purposes and differ only by the register used to store the compare value, so
we'll go with the first.
The table says that for this mode, only bit WGM12 needs to be set. It also says
that the register used for the compare value is named OCR1A.
Looking at the timer control registers (TCCR1A and TCCR1B) you should notice
that the WGM1x bits - used to configure the timer's mode - are spread out over
both registers. This is a small pain as you need to find out which bits are in
which register, but once found setting up the timer becomes very easy. In fact,
as we only have one bit to set - WGM12 - our task is even easier. The MEGA16's
datasheet says that WGM12 is located in the TCCR1B register, so we need to set
that.
Code:
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TCCR1B |= (1 << WGM12); // Configure timer 1 for CTC mode
// TODO: Set compare value for a compare rate of 1Hz
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Start timer at Fcpu/64
for (;;)
{
if () // TODO: Check CTC flag
{
PORTB ^= (1 << 0); // Toggle the LED
// TODO: Clear CTC flag
}
}
}
The second task for this experiment is to set the compare value - the value that
will reset the timer and set the CTC flag when reached by the timer. We know
from the datasheet that the register for this is OCR1A for the MEGA16 in the
first CTC timer mode, so all we need is a compare value. From our previous
experiment we calculated that 1Hz at 1MHz with a prescaler of 64 needs a compare
value of 15624, so let's go with that.
Code:
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TCCR1B |= (1 << WGM12); // Configure timer 1 for CTC mode
OCR1A = 15624; // Set CTC compare value to 1Hz at 1MHz AVR clock, with a prescaler of 64
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Start timer at Fcpu/64
for (;;)
{
if () // TODO: Check CTC flag
{
PORTB ^= (1 << 0); // Toggle the LED
// TODO: Clear CTC flag
}
}
}
There, almost done already! Last thing we need is a way of checking to see if
the compare has occurred, and a way to clear the flag once its been set. The
place to look for the compare flags is in the timer's Interrupt Flag register -
an odd place it seems, but the reason will become clear in the next section
dealing with timer interrupts. The MEGA16's Timer 1 interrupt flags are located
in the combined register TIFR, and the flag we are interested in is the
"Output Compare A Match" flag, OCF1A. Note the "A" on the
end; Timer 1 on the MEGA16 has two CTC channels (named channel A and channel B),
which can work independently. We're only using channel A for this experiment.
Checking for a CTC event involves checking the OCF1A flag in this register.
That's easy - but what about clearing it? The datasheet includes an interesting
note on the subject:
Quote:
...OCF1A can be cleared by writing a logic 1 to its bit location
Very strange indeed! In order to clear the CTC flag, we actually need to set it
- even though it's already set. Due to some magic circuitry inside the AVR,
writing a 1 to the flag when its set will actually cause it to clear itself.
This is an interesting behaviour, and is the same across all the interrupt bits.
Despite that, we can now add in our last lines of code to get a working example:
Code:
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TCCR1B |= (1 << WGM12); // Configure timer 1 for CTC mode
OCR1A = 15624; // Set CTC compare value to 1Hz at 1MHz AVR clock, with a prescaler of 64
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Start timer at Fcpu/64
for (;;)
{
if (TIFR & (1 << OCF1A))
{
PORTB ^= (1 << 0); // Toggle the LED
TIFR = (1 << OCF1A); // clear the CTC flag (writing a logic one to the set flag clears it)
}
}
}
Note that when clearing the OCF1A flag, we assign its value to the TIFR
register. This is because it will assign a logic one to the flag's position
(clearing it) but also because as writing zeros to the other flags won't affect
them, we can go ahead and use the smaller (codesize-wise) direct assignment,
rather than ORing the register to form a read/modify/write sequence. This is
also beneficial because it prevents the compiler from writing logic one to the
other flags if they were already set via the read/modify/write, which would
clear unwanted flags.
And there we have it, a working 1Hz LED flasher using the CTC timer mode!
Part Five
- CTC Mode using Interrupts
Important: The interface for defining
and working with Interrupts has changed in the more recent versions of WinAVR -
please make sure you've updated your installation to the latest version if you
encounter errors relating to the unknown macro "ISR".
For all our previous experiments, we've been using a looped test in our main
code to determine when to execute the timer action code. That's fine - but what
if we want to shift the responsibility of choosing when to execute the timer
code to the AVR hardware instead? To do this, we need to look at the timer
interrupts.
Interrupts are events that when enabled, cause the AVR to execute a special
routine (called an Interrupt Service Routine, or ISR for short) when the
interrupt conditions are met. These interrupts can happen at any time and when
executing the main routine is paused while the ISR executes, the the main
routine continues until the next interrupt. This is useful for us, as it means
we can eliminate the need to keep checking the timer value and just respond to
it's interrupt events instead.
The AVR timers can have several different Interrupts - typically Overflow,
Compare and Capture. Overflow occurs when the timer's value rolls past it's
maximum and back to zero (for an 8 bit timer, that's when it counts past
11111111 in binary and resets back to 00000000). However, for this section we'll
deal with the Compare interrupt, which occurs in CTC mode when the compare value
is reached.
Again, we'll pseudocode this to start with:
Code:
Set up timer in CTC mode
Enable CTC interrupt
Enable global interrupts
Set timer compare value to one second
WHILE forever
END WHILE
ISR Timer Compare
Toggle LED
END ISR
We can start off this by working with our skeleton main code, used in previous
examples. I'll skip the details on the parts already discussed in previous
sections.
Code:
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TCCR1B |= (1 << WGM12); // Configure timer 1 for CTC mode
// TODO: Enable CTC interrupt
// TODO: Enable global interrupts
OCR1A = 15624; // Set CTC compare value to 1Hz at 1MHz AVR clock, with a prescaler of 64
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Start timer at Fcpu/64
for (;;)
{
}
}
// TODO: Add compare ISR here
Note how it's a modified version of the non-interrupt driven CTC example covered
in the last section. All we need to do is tell the timer to run the compare ISR
we define when it counts up to our compare value, rather then us polling the
compare match flag in our main routine loop.
We'll start with creating the ISR first, as that's quite simple. In AVR-GCC -
specifically, the avr-libc Standard C Library that comes with it - the header
file for dealing with interrupts is called (unsurprisingly) "interrupt.h"
and is located in the "avr" subdirectory. We need to include this at
the top of our program underneath our include to the IO header file. The top of
our code should look like this:
Code:
#include <avr/interrupt.h>
int main (void)
{
...
This gives us access to the API for dealing with interrupts. We want to create
an ISR for the Timer 1 Compare Match event. The syntax for defining an ISR body
in AVRGCC is:
Code:
{
// Code to execute on ISR fire here
}
Where "VectorName" is the name of the ISR vector which our defined ISR
handles. The place to go to find this name is the "Interrupt" section
of the datasheet, which lists the symbolic names for all the ISR vectors that
the chosen AVR supports. When writing the vector name into GCC, replace all
spaces with underscores, and append "_vect" to the end of the vector's
name.
Like in part four we are still dealing with Channel A Compare of Timer 1, so we
want the vector named "TIMER1 COMPA". In GCC this is called
"TIMER1_COMPA_vect", after performing the transformations outlined in
the last paragraph. Once the ISR is defined, we can go ahead and write out it's
body, adding the LED toggling code.
Code:
#include <avr/interrupt.h>
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TCCR1B |= (1 << WGM12); // Configure timer 1 for CTC mode
// TODO: Enable CTC interrupt
// TODO: Enable global interrupts
OCR1A = 15624; // Set CTC compare value to 1Hz at 1MHz AVR clock, with a prescaler of 64
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Start timer at Fcpu/64
for (;;)
{
}
}
ISR(TIMER1_COMPA_vect)
{
PORTB ^= (1 << 0); // Toggle the LED
}
Notice how we don't clear the CTC event flag like in part four - this is
automatically cleared by the AVR hardware once the ISR fires. Neat, isn't it!
Running the code so far won't yield any results. This is because although we
have our ISR all ready to handle the CTC event, we haven't enabled it! We need
to do two things; enable the "TIMER1 COMPA" interrupt specifically,
and turn on interrupt handling on our AVR.
The way to turn on our specific interrupt is to look into the second
interrupt-related register for our timer, TIMSK. This is the Timer Interrupt
Mask register, which turns on and off ISRs to handle specific timer events. Note
that on the MEGA16 this single register contains the enable bits for all the
timer interrupts for all the available timers. We're only interested in the
Timer 1 Compare A Match interrupt enable bit, which we can see listed as being
called OCIE1A (Output Compare Interrupt Enable, channel A).
By setting that bit we instruct the timer to execute our ISR upon compare match
with our specified compare value. Let's put that line into our program's code
and see how it all looks.
Code:
#include <avr/interrupt.h>
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TCCR1B |= (1 << WGM12); // Configure timer 1 for CTC mode
TIMSK |= (1 << OCIE1A); // Enable CTC interrupt
// TODO: Enable global interrupts
OCR1A = 15624; // Set CTC compare value to 1Hz at 1MHz AVR clock, with a prescaler of 64
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Start timer at Fcpu/64
for (;;)
{
}
}
ISR(TIMER1_COMPA_vect)
{
PORTB ^= (1 << 0); // Toggle the LED
}
Only one more thing to do - enable global interrupts. The AVR microcontrollers
have a single control bit which turns on and off interrupt handling
functionality. This is used in pieces of code where interrupt handling is not
desired, or to disable interrupts while an ISR is already being executed. The
latter is done automatically for us, so all we need to do is turn on the bit at
the start of our code, and our compare interrupt will start to work.
The command to do this is called "sei" in the avr-libc library that
ships with WinAVR, and is named to correspond with the assembly instruction
which does the same for AVRs (the SEI instruction). That's irrelevant however,
as we just need to call the command in our code.
Code:
#include <avr/interrupt.h>
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TCCR1B |= (1 << WGM12); // Configure timer 1 for CTC mode
TIMSK |= (1 << OCIE1A); // Enable CTC interrupt
sei(); // Enable global interrupts
OCR1A = 15624; // Set CTC compare value to 1Hz at 1MHz AVR clock, with a prescaler of 64
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Start timer at Fcpu/64
for (;;)
{
}
}
ISR(TIMER1_COMPA_vect)
{
PORTB ^= (1 << 0); // Toggle the LED
}
And our example is finished! Running this will give a nice 1Hz LED flashing,
using the timer's event interrupts. The nice thing is that the timer operation
is now completely handled for us in hardware - once set up, we just need to
react to the events we've configured. Notice that our main loop is now empty; if
this is the case you may put sleep commands inside the main loop to save power
between compares.
Part Six -
Pure Hardware CTC
You probably think by now that we've improved our example as much as possible -
after all, what more improvements are there to make? Well, it's time to finish
of the CTC topic by looking at the hardware outputs.
All AVRs' pins have alternative hardware functions. These functions (currently
non re-routable) when activated interface the IO pins directly to the AVR's
internal hardware - for instance the Tx/Rx alternative functions which are the
direct interface to the AVR's USART subsystem. Alternative pin functions can be
very useful; as they can be internally connected straight to a hardware
subsystem, the maximum possible performance can be achieved.
In this section, we'll be looking at the Compare Output settings of the AVR
timer.
Looking at the timer 1 control registers, we can see a few pairs of bits we've
previously ignored, called (for timer 1) COM1A1/COM1A0 and COM1B1/COM1B0. Bonus
points to anyone who's linked the "A" and "B" parts of the
bit names to the timer compare channels - you're spot on.
These bits allow us to control the hardware behaviour when a compare occurs.
Instead of firing an interrupt, the hardware can be configured to set, clear or
toggle the OCxy (where "x" is the timer number, "y" is the
channel letter for timers with more than one channel) hardware pins when a
compare occurs. We can use the toggle function with our LED flasher, so that the
hardware toggles the LED's state for us automatically, making it a true
set-and-forget operation.
Before we do anything else, let's work out which pins of our MEGA16 are linked
to the Compare Output hardware - we want the pins with alternative functions
starting with "OC". On our PDIP package version, that maps to:
Quote:
PB3 = OC0
PD4 = OC1B
PD5 = OC1A
So timer 0 has one Compare Output channel, while timer 1 has two (channels A and
B) as we've already discovered. As always we'll just deal with Channel A in our
example.
Now we have a problem. All the previous chapters have assumed the LED is
attached to PORTB, bit 0 - but we'll have to move it for this chapter. As stated
above the alternative functions cannot be moved to another pin, so we must move
moses...I mean, our LED, to the pin with
the required alternative function.
Timer 1 Channel A's Compare Output is located on PD5, so move the LED there for
the rest of this example. Now, let's psudocode:
Code:
Set up timer in CTC mode
Enable timer 1 Compare Output channel A in toggle mode
Set timer compare value to one second
WHILE forever
END WHILE
Amazing how simple it is, isn't it! Well, we can already fill in almost all of
this:
Code:
#include <avr/interrupt.h>
int main (void)
{
DDRD |= (1 << 5); // Set LED as output
TCCR1B |= (1 << WGM12); // Configure timer 1 for CTC mode
// TODO: Enable timer 1 Compare Output channel A in toggle mode
OCR1A = 15624; // Set CTC compare value to 1Hz at 1MHz AVR clock, with a prescaler of 64
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Start timer at Fcpu/64
for (;;)
{
}
}
All we need is to configure the timer so that it'll toggle our channel A output
each time the timer value is equal to our compare value. The datasheet has
several descriptions for the functionality of the COM1Ax and COM1Bx bits, so we
need to find the table corresponding to the mode we're using the timer in.
CTC mode isn't listed - instead the appropriate table is listed as "Compare
Output mode, Non PWM". PWM stands for "Pulse Width Modulation",
and will be covered later on in this tutorial. For now, it is sufficient to know
that the CTC mode is not a form of PWM and thus the non-PWM bit description
table is the one we're looking for.
To make the channel A Compare Output pin toggle on each compare, the datasheet
says we need to set bit COM1A0 in TCCR1A. That's our missing line - let's add it
in!
Code:
#include <avr/interrupt.h>
int main (void)
{
DDRD |= (1 << 5); // Set LED as output
TCCR1B |= (1 << WGM12); // Configure timer 1 for CTC mode
TCCR1A |= (1 << COM1A0); // Enable timer 1 Compare Output channel A in toggle mode
OCR1A = 15624; // Set CTC compare value to 1Hz at 1MHz AVR clock, with a prescaler of 64
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Start timer at Fcpu/64
for (;;)
{
}
}
Simple, isn't it! We've now created the simplest (code-wise) LED flasher
possible using pure hardware functionality. Running this will cause the LED to
flash at 1Hz, without any code other than the timer initialization!
Part Seven
- The Overflow Event
Well, now that we've had fun creating a LED flasher via a variety of software
and hardware CTC methods, we'll move on to one last LED flashing program. This
time we'll be using a different Timer event to manage the toggling of the LED -
the overflow.
As previously stated, timers store their values into internal 8 or 16 bit
registers, depending on the size of the timer being used. These registers can
only store a finite number of values, resulting in the need to manage the timer
(via prescaling, software extention, etc) so that the interval to be measured
fits within the range of the chosen timer.
However, what has not been discussed yet is what happens when the range of the
timer is exceeded. Does the AVR explode? Does the application crash? Does the
timer automatically stop?
The answer is simple, if rather boring. In the event of the timer register
exceeding its capacity, it will automatically roll around back to zero and keep
counting. When this occurs, we say that the timer has "overflowed".
When an overflow occurs, a bit is set in one of the timer status registers to
indicate to the main application that the event has occured. Just like with the
CTC hardware, there is also a corresponding bit which can enable an interrupt to
be fired each time the timer resets back to zero.
So why would we need the overflow interrupt? Well, I leave that as an excersize
to the reader. However, we can demonstrate it here in this tutorial - via
another LED flasher, of course.
Calculating the frequency of the flashing is a little different to our previous
examples, as now we have to calculate in reverse (to find the frequency from the
timer count and timer resolution rather than the timer count from a known
frequency and timer resolution). We'll still be working with our 16-bit timer 1
for this example, to be consistent with previous chapters.
Let's go back to our one of the timer equations we used back in chapter 2:
Code:
We want to determine the Target Frequency from the other two variables, so let's
rearrange:
Code:
And swap the left and right hand sides to get it into a conventional form:
Code:
Since we know that for the overflow equation, the "Target Timer Count"
becomes the maximum value that can be held by the timer's count register, plus
one (as the overflow occurs after the count rolls over from the maximum back to
zero). The formula for the maximum value that can be held in a number of bits
is:
Code:
But we want one more than that to get the number of timer counts until an
overflow occurs:
Code:
Change "Max Value" to the more appropriate "Target Timer
Count" in the first timer equation:
Code:
And substitute in the formula for the counts until overflow to get the timer
period equation. Since frequency is just the inverse of period, we can also work
out the frequencies of each duration as well:
Code:
Code:
Which is a bit complex, but such is life. Now's the fun part - we can now work
out the overflow frequencies and periods for our 16-bit Timer 1 running at
different prescales of our AVR's 1MHz system clock:
Code:
Code:
1 | 15.259 Hz | 65.5 ms
8 | 1.907 Hz | 0.524 s
64 | .2384 Hz | 4.195 s
256 | .0596 Hz | 16.78 s
1024 | .0149 Hz | 67.11 s
Note how our frequency decreases (and period increases) as our prescaler
increases, as it should. Because we have a reasonably slow main system clock,
and a large timer count register, we end up with frequencies that are easy to
see with the naked eye (with the exception of the case where no prescaler is
used). Unlike the CTC method however, we are limited to the frequencies above
and cannot change them short of using a smaller timer, different prescaler or
different system clock speed - we lose the precision control that the CTC modes
give us.
For this example, we'll use a prescaler of 8, to give a 1.8Hz flashing
frequency, and a period of about half a second.
Almost time to get into the code implementation. But first, pseudocode! I'm
going to extrapolate on the preceding chapters and jump straight into the ISR-powered
example, rather than begin with a polled example. It works in the same manner as
previous polled experiments, except for the testing of the overflow bit rather
than the CTC bit.
Code:
Set up timer overflow ISR
Start timer with a prescale of 8
WHILE forever
END WHILE
ISR Timer Overflow
Toggle LED
END ISR
Let's get started. As always, we'll begin with the skeleton program:
Code:
#include <avr/interrupt.h>
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
// TODO: Enable overflow interrupt
// TODO: Enable global interrupts
// TODO: Start timer at Fcpu/8
for (;;)
{
}
}
// TODO: Add overflow ISR here
Let's begin with filling in the bits we can already do. The ISR code is easy -
we can use the same ISR as part five, except we'll be changing the compare
vector to the overflow vector of timer 1.
Looking in the MEGA16 datasheet, the overflow interrupt for timer 1 is obvious -
it's listed as "TIMER1 OVF" in the Interrupts chapter. Just like in
part five, we need to replace the spaces in the vector name with underscores,
and add the "_vect" suffix to the end.
We can also fill in the "Enable global interrupts" line, as that is
identical to previous chapters and is just the "sei()" command from
the <avr/interrupt.h> header file.
Code:
#include <avr/interrupt.h>
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
// TODO: Enable overflow interrupt
sei(); // Enable global interrupts
// TODO: Start timer at Fcpu/8
for (;;)
{
}
}
ISR(TIMER1_OVF_vect)
{
PORTB ^= (1 << 0); // Toggle the LED
}
Next, we need to figure out how to enable the overflow vector, so that our ISR
is run each timer the overflow occurs. The datasheet's 16-bit Timer/Counter
section comes to our rescue again, indicating that it is the bit named
"TOIE1" located in the Timer 1 Interrupt Mask register, TIMSK:
Code:
#include <avr/interrupt.h>
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TIMSK |= (1 << TOIE1); // Enable overflow interrupt
sei(); // Enable global interrupts
// TODO: Start timer at Fcpu/8
for (;;)
{
}
}
ISR(TIMER1_OVF_vect)
{
PORTB ^= (1 << 0); // Toggle the LED
}
The last thing we need to do, is start the timer with a prescaler of 8. This
should be easy for you to do - if not, refer back to chapter 2.
The MEGA16 Datasheet, Timer 1 section tells us that for a timer running with a
prescaler of 8, we need to start it with the bit CS11 set in the control
register TCCR1B. Adding that to our code finishes our simple program:
Code:
#include <avr/interrupt.h>
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TIMSK |= (1 << TOIE1); // Enable overflow interrupt
sei(); // Enable global interrupts
TCCR1B |= (1 << CS11); // Start timer at Fcpu/8
for (;;)
{
}
}
ISR(TIMER1_OVF_vect)
{
PORTB ^= (1 << 0); // Toggle the LED
}
All done! This simple program will cause the LED to toggle each time the
overflow occurs and serves as a practical use of the overflow interrupt.
Part Eight
- Overflow as CTC
One neat application of the overflow event is for creating a CTC timer on AVRs
which don't support true hardware CTC. It's not as neat as the pure hardware CTC
discussed in part six, but faster than the pure software CTC discussed in part
two.
CTC works by having a fixed BOTTOM value - that's the timer's minimum value - of
zero, and a variable TOP value, the value at which resets the timer and fires
the event. However, with the overflow event we seemingly have a fixed BOTTOM of
again zero, and a fixed TOP of the maximum timer's value. Not so - with a small
trick we can adjust the BOTTOM value to give us the equivelent of a CTC
implementation standing on it's head.
This tecnique is called timer reloading. When configured, we preload the timer's
count register (which is both readable and writeable) with a value above zero.
This shortens the time interval before the next overflow event, although only
for a single overflow. We can get around that by again reloading the timer's
value to our non-zero value inside the overflow event for a hybrid
software/hardware CTC.
Psuedocode time!
Code:
Set up timer overflow ISR
Load timer count register with a precalculated value
Start timer with a prescale of 8
WHILE forever
END WHILE
ISR Timer Overflow
Toggle LED
Reload timer count register with same precalculated value
END ISR
Let's examine the maths again. From part two, we know that the formula for
determining the number of timer clock cycles needed for a given delay is:
Code:
Which works for a fixed BOTTOM of zero, and a variable TOP. We've got the
"upside-down" implementation of a fixed top of ((2 ^ Bits) - 1) and a
variable BOTTOM. Our BOTTOM value becomes the TOP minus the number of clock
cycles needed for the equivelent CTC value, so the formula becomes:
Code:
Let's go with the previous example in part two: a 1Hz flasher, using a 1MHz
clock and a prescale of 64. We found the timer count to be 15625 for those
conditions. Plugging it into the above Reload Timer Value formula gives:
Code:
= ((2 ^ 16) - 1) - 15624
= 65535 - 15624
= 49911
So we need to preload and reload our overflow timer on each overflow with the
value 49911 to get our desired 1Hz delay. Since we've already gone over the code
for an interrupt-driven overflow example in part seven, we'll build upon that.
Code:
#include <avr/interrupt.h>
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TIMSK |= (1 << TOIE1); // Enable overflow interrupt
sei(); // Enable global interrupts
// TODO: Preload timer with precalculated value
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Set up timer at Fcpu/64
for (;;)
{
}
}
ISR(TIMER1_OVF_vect)
{
PORTB ^= (1 << 0); // Toggle the LED
// TODO: Reload timer with precalculated value
}
Both the reloading and preloading of the timer takes identical code - we just
need to set the timer's count register to the precalculated value. The timer's
current count value is avaliable in the TCNTx register, where "x" is
the timer's number. We're using the 16-bit timer 1, so the count value is
located in TCNT1.
We'll now finish of the example, replacing the unfinished segments:
Code:
#include <avr/interrupt.h>
int main (void)
{
DDRB |= (1 << 0); // Set LED as output
TIMSK |= (1 << TOIE1); // Enable overflow interrupt
sei(); // Enable global interrupts
TCNT1 = 49911; // Preload timer with precalculated value
TCCR1B |= ((1 << CS10) | (1 << CS11)); // Set up timer at Fcpu/64
for (;;)
{
}
}
ISR(TIMER1_OVF_vect)
{
PORTB ^= (1 << 0); // Toggle the LED
TCNT1 = 49911; // Reload timer with precalculated value
}
And done! This is less preferable to the pure hardware CTC mode, as it requires
a tiny bit more work on both the programmer and the AVR to function. However, it
will work just fine for AVRs lacking the complete CTC timer functionality.
Part Nine
- Pulse Width Modulation (PWM)
The previous sections of the timers tutorial have been dealing with a simple
task - flashing a LED. We've managed to accomplish that task using a variety of
methods which all center around the "Clear On Timer Compare" (or CTC)
method of using the timer, in both software and hardware. But what if we want to
dim the LED instead? Now we are getting into a new timer concept, that of Pulse
Width Modulation, abbreviated to PWM for short.
Pulse Width Modulation allows us to interface our digital components with the
analogue world. We can use PWM to adjust a motor's speed, a LED's brightness or
a speaker's tone. PWM is a very important concept, which is used all throughout
the world of digital electronics. It is a way of approximating
an analogue source, which with a little filtering can be used as a real analogue
source (albeit with a few limitations).
It's important to note that PWM does not change our AVR's limitations; the
signal sent out by the timer is still a true digital signal. However, by
altering the on and off time of the signal at a given frequency, we can adjust
the average on time to give an approximate analogue signal. This signal is good
enough for immediate use in many applications - including motor speed control
and LED dimming - without any extra filtering, or with the addition of a
capacitor the output can be smoothed to a real analogue wave.
Let's start with a picture representing the different types of signals (modified
from Wikipedia):
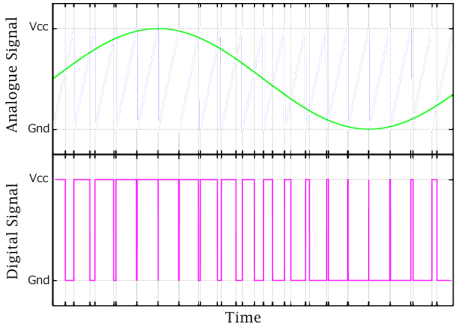
The top waveform is a traditional analogue signal, varying smoothly from GND to
VCC volts. The bottom waveform is a digital representation of the top, using PWM.
PWM allows us to set an overall frequency, and then vary the on and off time
(called the duty cycle) of the output
within each timer cycle. A longer duty cycle gives a longer on time, resulting
in an analogue representation closer to the VCC voltage. A duty cycle of 100%
(on for the entire cycle) gives a VCC output, while a duty cycle of 0% (off for
the entire cycle) gives a GND output.
When we use the CTC timer mode, what we are actually doing is essentially PWM,
but with a fixed duty cycle of 50%, and a variable frequency. For this example,
we're using PWM and will conversely be using a fixed frequency and varying the
duty cycle to dim our LED.
There are several different PWM modes that the AVR timers can be initialized in,
each with slightly different characteristics. These are as follows:
-
1) Fast PWM (8, 9 or 10 bit)
2) Phase Correct PWM
3) Phase and Frequency Correct PWM
Before we can explore the different modes, we need to understand a little of the
timer terminology. Frequency, as we know, is the number of cycles per second
that the timer runs at - a higher frequency gives us a faster timer. In the PWM
world, having a faster PWM frequency gives us finer control over the output, as
we can respond faster to new PWM duty cycles. This is especially important when
using PWM to produce audio from digital samples; a faster PWM frequency is
required to give the full output frequency range by varying the duty cycle.
Next, we have the BOTTOM value. This is the lowest value that the timer will
reach in the current mode. In all timer modes on all AVRs, this will be zero.
Accompanying BOTTOM is TOP, which is the maximum value that the timer will reach
before either (depending on the mode) resetting back to 0x00 or begin counting
in reverse back to BOTTOM. For the normal mode, TOP is equal to the maximum
value the timer can reach. For CTC mode, TOP is user settable, which gives us
our control over the timer period. We are now using PWM, thus TOP is now set to
give the PWM frequency.
Finally, we have our PWM COMPARE value. This sets the duty cycle - when this
value is reached the waveform is inverted from its current state. Varying the
COMPARE value will give us our varying duty cycle.
Now, let's get down to business and go into the three PWM modes.
Fast PWM
Fast PWM is useful for outputting PWM values quickly, at a loss of phase
correctness - changes to the duty cycle will be reflected immediately, with the
new signal being phase incorrect. When selected, the timer will count up from
BOTTOM to TOP, with TOP being fixed at the bit-width of the fast PWM -- we are
given a choice of 8, 9 or 10 bits depending on the timer bit width (8 bit timers
will obviously not offer Fast PWM in more than 8-bits). The timer, when started,
will count up continuously until TOP is reached, when it wraps back to BOTTOM
and starts again. Inside this period when the counter reaches the COMPARE value,
the output pin is set when the correct value is reached (and cleared when the
timer wraps back from TOP to BOTTOM), so that varying COMPARE we get a PWM of a
fixed frequency but a variable duty cycle.
This gives us the ability to change the duty cycle rapidly, in applications
where the phase change does not matter. Applications such as motor control are
particular about the phase, so we need to use the Phase Correct PWM mode.
Phase Correct PWM
Phase correct PWM gives phase-correct output as the duty cycle changes. The
concept of phase is foregn to some, so we'll take a look graphically at how
phase-incorrect (Fast PWM) and phase-correct PWM waveforms differ:

Notice the difference? In the case of Fast PWM, the high points are always
aligned to the start of each period, with a smaller duty cycle resulting in a
shorter ON time. Phase Correct PWM by contrast aligns the high points to the
center of each period, so that a smaller duty cycle results in a shorter ON time
-- but the ON times of all signals are aligned. As inducated in the Fast PWM
explanation, this mode is useful in applications where the phase of the signals
should not change, even if the duty cycles do. Phase Correct is slower than Fast
PWM (as the name of the latter implies) due to the way Phase Correct PWM works.
When selected, the timer will count up from BOTTOM to TOP, and then start
counting downwards back to BOTTOM before
repeating. When upcounting, reaching COMPARE will turn on the output pin, while
reaching the same value when downcounting will turn the output off. This results
in the timer period being twice as long
as Fast PWM mode (since the timer also has to count back to BOTTOM rather than
just wrapping) but produces a phase-correct signal.

In Phase Correct PWM, the TOP value is variable and so the mode supports a
variable PWM frequency. For generating simple audio tones from a speaker it is
common to use the variable frequence of this mode to change the note pitch, and
use the duty cycle to change the volume; a higher duty cycle results in a longer
ON timer for the speaker, and so produces a louder sound.
SECTION INCOMPLETE - More
updates soon.
- Dean ![]()