Back
[01:08:01] <Anniepoo_> printer showed up today. much smaller than I expected, which is good.
[01:08:28] <rue_house> 20x20?
[01:10:47] <synja> hey
[01:11:09] <rue_house> hay
[01:11:39] <synja> what does this group usually chat about?
[01:11:44] <synja> anyone making a robot?
[01:12:17] <rue_house> politics, artificial intelligence, microcontrollers, chemistry, machining, electronics
[01:12:23] <Anniepoo_> hmmm... if I were going to make the snail's shell from FRG, I guess I'd need a 2 piece mold. HOw can I cope with doing layup?
[01:12:30] <rue_house> anniepoo, is making a robot
[01:12:38] <Anniepoo_> rue is too
[01:12:52] <synja> how large?
[01:12:57] <synja> what shape?
[01:12:57] <rue_house> well, I'm not working on any of the robots on the back burner
[01:13:05] <rue_house> everything from small arms to large walkers
[01:13:15] <Anniepoo_> I'm making a robotic snail
[01:13:17] <Anniepoo_> 8cD
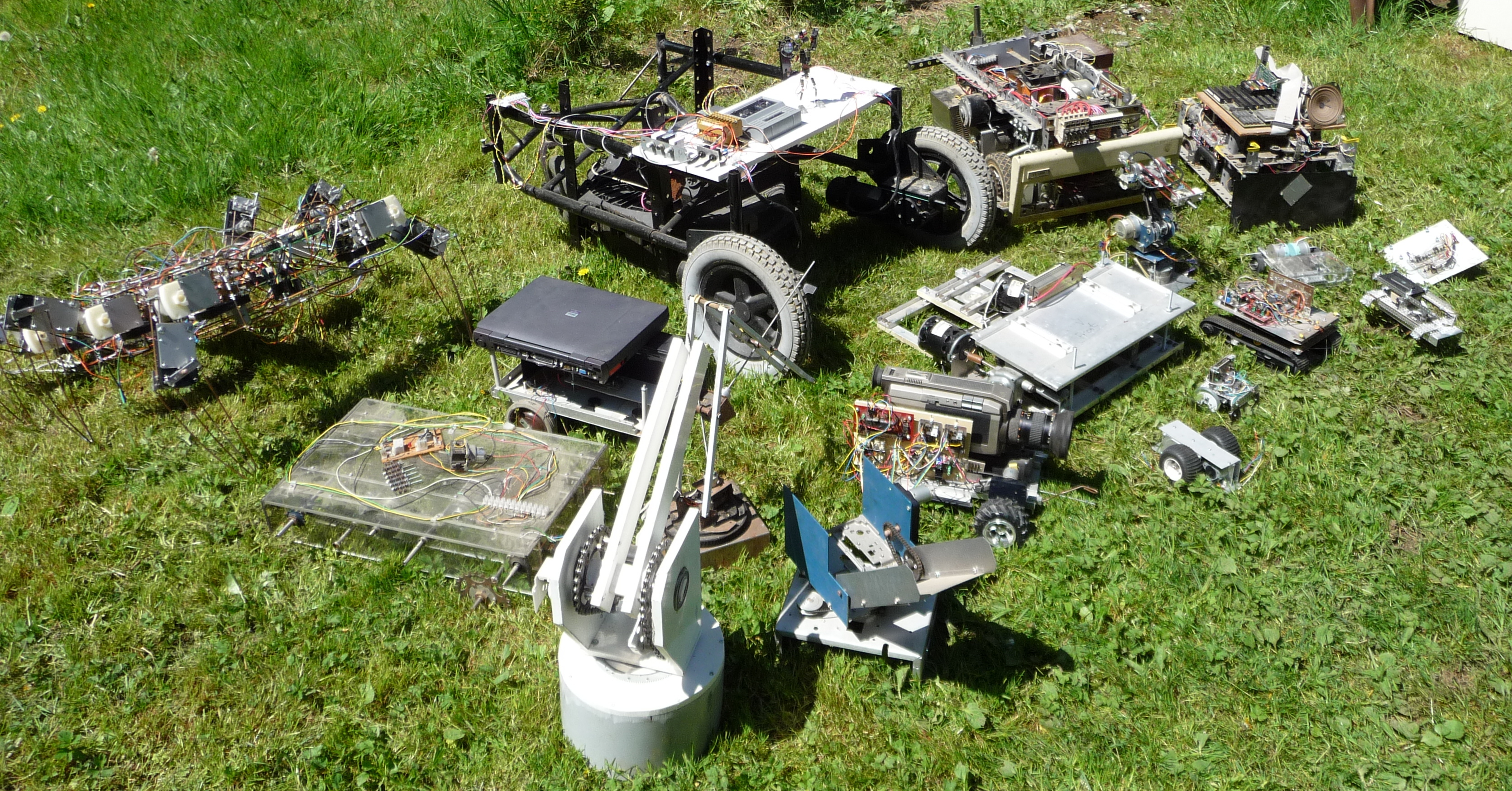
[01:13:24] <rue_house> http://ruemohr.org/~ircjunk/robots/robot_family2.jpg
[01:13:33] <rue_house> ooold outdated image
[01:13:55] <rue_house> ugh, that was 7 years ago
[01:14:09] <Anniepoo_> >8@_
[01:14:22] <synja> oh my
[01:14:29] <synja> you must certainly have some $$ to spend
[01:14:33] <Anniepoo_> rue, do you have any experience with FRG?
[01:14:36] <rue_house> no
[01:14:45] <Anniepoo_> 8c(
[01:14:46] <rue_house> each one of those, and the other robots are $20 projects
[01:14:48] <Anniepoo_> okey dokey
[01:15:01] <rue_house> (I'm allowed to go 200% overbudget, but usually dont)
[01:15:29] <rue_house> I dont spend lots on robots, but I make lots of them
[01:15:36] <synja> i just ordered hands for mine
[01:15:41] <synja> it got sick of claws
[01:15:42] <rue_house> so if one dosn't work, I'm not out much money
[01:15:51] <rue_house> k :)
[01:15:51] <synja> well, you can always make it to work :P
[01:16:14] <Anniepoo_> I'll probably have $600 in the snail before I'm done. I'm kinda sorta doing it for 'serious' reasons, and kinda sorta doing it for fun
[01:16:15] <synja> lol you say that almost with incredulity
[01:16:25] <synja> oh my
[01:17:25] <synja> so what can your robots do?
[01:18:02] <synja> here ill take a pic of my finest
[01:18:10] <rue_house> https://www.youtube.com/watch?v=j4uz_yha9uI
[01:18:23] <Anniepoo_> mine's intended as a research platform to study interactions between a robot and a group of human children
[01:18:32] <Anniepoo_> snaily tells stories!
[01:18:37] <Anniepoo_> and plays games!
[01:18:56] <rue_house> https://www.youtube.com/watch?v=slxOrCXxXOg
[01:19:21] <synja> very neat annie. i've been trying to organize a classroom at the local library to teach kids about programming and robotics
[01:19:36] <Anniepoo_> oh, fun
[01:19:45] <rue_house> https://www.youtube.com/watch?v=3N7DNfg4p9I
[01:20:00] <Anniepoo_> well, now I'm irritated
[01:20:20] <rue_house> https://www.youtube.com/watch?v=qZF9WJ1Ueew
[01:20:23] <rue_house> about what?
[01:20:32] <Anniepoo_> after spending a couple hours on the 'no tail' version of the shell, I discover it's winding the wrong way
[01:20:48] <rue_house> :S
[01:20:53] <rue_house> https://www.youtube.com/watch?v=5vLEtVLV71I
[01:21:24] <rue_house> synja, so yea.
[01:21:39] <z64555> rue_house:
http://pastebin.com/ve9LnZQu
[01:21:54] <z64555> if you have time to make sense of that
[01:21:57] <synja> do any of you do 3d printing and such to make them?
[01:22:18] * Anniepoo_ uses old fashioned lasers and CNC mills.
[01:22:19] <synja> postimg.org/image/rynn37tpp
[01:22:26] <rue_house> dear god man
[01:22:26] <synja> nice. wish i had those
[01:22:41] <rue_house> synja, there are 3 3d printers in my shop now
[01:22:44] <synja> this is alice. i put her offline until i install those hands
[01:23:21] <Anniepoo_> far out
[01:23:25] <Anniepoo_> nice robot
[01:23:28] <synja> thanks!
[01:23:35] <rue_house> ? didn't work for me
[01:23:46] <Anniepoo_> worked for me
[01:24:08] <rue_house> you using chromium?
[01:24:11] <z64555> synja: looks kinda like Wall-E
[01:24:13] <Anniepoo_> rue, it's a big img, might take a while
[01:24:16] <synja> she's equipped with disparity vision for depth perception, along with ultrasonic for that. opencv image recognition for over 220 types of objects and individual faces
[01:24:27] <synja> idk what chromium is
[01:24:34] <Anniepoo_> chrome on a winders box at moment
[01:24:36] <rue_house> web browser
[01:24:38] <synja> i've heard of that movie z64555
[01:24:44] <synja> no
[01:24:49] <rue_house> it looks like the site uses stuff too new for the brower I'm using
[01:24:50] <z64555> even the pose is the same, lol
[01:25:07] <synja> ew windows :P
[01:25:17] <synja> bsd or go home
[01:25:33] <Anniepoo_> http://s30.postimg.org/4x71xgu27/0203170151.jpg
[01:25:36] <Anniepoo_> rue, try that
[01:25:40] <Anniepoo_> it's the raw img
[01:25:57] <rue_house> that worked
[01:26:11] <Anniepoo_> 3k res
[01:26:21] <rue_house> thats quite a bit of work
[01:26:23] <synja> has voice recognition full speech to text and text to speech
[01:26:34] <synja> the programming was the bulk of it
[01:26:38] <synja> wasn't that bad
[01:26:46] <synja> giving her a more generalized intelligence now
[01:27:19] <rue_house> just need to mix it with foxy or tigger
[01:27:27] <synja> ?
[01:27:55] <rue_house> two smart bots that were put down by their creators
[01:27:59] <synja> i've been toying with the notion of giving her a silicone exterior
[01:28:14] <synja> ah, well she isn't being put down anytime soon
[01:28:38] <rue_house> I think foxy was put in storage and lost
[01:28:39] <synja> talk bot, psych bot, research bot, solder helping bot, cleaner bot
[01:28:47] <rue_house> tigger was dumbed down and taken offline
[01:28:55] <synja> oh and virtual presence for my neice
[01:29:02] <synja> aww :(
[01:30:27] <Anniepoo_> synja - if you're going to give her a social covering, you could use polyfill and fabric
[01:30:51] <synja> thanks for the advice! i'll make a note of it
[01:31:34] <synja> i still need to replace the ultrasonic sensor though. keeps giving me inaccurate readings
[01:31:53] <synja> worked well for months and now all of a sudden, kaput
[01:31:58] <z64555> Did you put a filter on its power source?
[01:32:05] <synja> oh yes
[01:32:06] <z64555> or power input, rather
[01:32:10] <z64555> ok
[01:32:26] <Anniepoo_> hmm... good thing you're talking about this, I'll do same
[01:32:46] <synja> it's on a roomba base though, although for the computer it's working off a 12vdc battery within the plastic container
[01:32:56] <synja> recharged when it docks
[01:33:04] <synja> both the roomba battery and the 12vdc
[01:33:13] <z64555> noise in the power lines can cause issues with those types. the "blue boards" are supposed to be the new gens stuff
[01:33:51] <synja> i've never had issues
[01:34:09] <z64555> Weather change much?
[01:34:21] <synja> oh yes. humidity changes too
[01:34:58] <z64555> Got an o-scope?
[01:35:14] <synja> oh yes
[01:35:47] <z64555> tap into the leads of the receiver can, and see what it hears during a few pings
[01:36:52] <z64555> I think you need a resistor in between the leads and your probe, i forget
[01:37:18] <synja> heh
[01:40:11] <synja> everything is acceptable
[01:40:23] <synja> hi there
[01:40:47] <synja> so are you all programmers too?
[01:40:58] <synja> what are your backgrounds?
[01:41:01] <z64555> nah, I'm just a robot imposter
[01:41:08] * z64555 hides
[01:41:16] <Anniepoo_> ok, turns out some go one way, some the other
[01:41:45] <Anniepoo_> I do AI programming at my day job. I'm a committer on SWI-Prolog.
[01:42:25] <z64555> I'm an EEEN graduate, I seem to like messing with programming more than building lately, though.
[01:42:37] <Anniepoo_> Just outta fun and hackishness I and my biz partner run an incubator for hardware/software/mechanics insanity
[01:42:47] <Anniepoo_> http://theelginworks.com
[01:43:05] <synja> very nice, both of you!
[01:43:30] <Anniepoo_> I used to work in social robotics
[01:43:46] <Anniepoo_> cool project, distinctly uncool workplace.
[01:43:51] <synja> lol
[01:44:05] <Anniepoo_> so now am doing it on my own
[01:44:07] <synja> i wish i had any funding for my AGI programming or my robots
[01:44:18] <synja> or a workplace where i could use cool toys
[01:47:44] <z64555> "makerspaces" are a trend, they're whorkshops for robotics, electronics, and some small-scale fabrication. Many are open to the public or otherwise have memberships/clubs that you can join
[01:48:14] <z64555> They seem to be more frequent in populous areas
[01:50:02] <Anniepoo_> durn durn durn
[01:50:07] <synja> i live in an extremely rural area
[01:50:53] <synja> besides, the projects i want to work on, usually require many expensive parts
[01:51:08] <synja> i want to build a fully humanoid version of alice
[01:51:12] <z64555> Yeah, you'd have to be lucky and have somebody as a retired machinist or something
[01:51:19] <z64555> to have a makerspace
[01:51:47] <synja> i have a few friends that make some parts for free, but they're mostly just odds 'n ends
[01:52:19] <Anniepoo_> ok, I'm in luck
[01:52:34] <synja> got a pic of it?
[01:52:54] <Anniepoo_> i think i can salvage this
[02:00:47] <rue_house> mirror
[02:01:02] <rue_house> Z*=(-1)
[02:01:10] <rue_house> oh
[02:01:15] <rue_house> z64555,
[02:01:24] <rue_house> before I go to bed, which I REALLY want to do
[02:01:41] <z64555> hm?
[02:02:24] <rue_house> http://paste.debian.net/912605/
[02:02:50] <rue_house> http://paste.debian.net/912606/
[02:03:13] <rue_house> point2d_t p;
[02:03:32] <rue_house> setPoint(&p, pt(0,4));
[02:03:58] <rue_house> rotatex(&p, Pi*2/sides);
[02:04:06] <rue_house> er rotatez, sorry
[02:04:24] <z64555> ah
[02:04:29] <z64555> thanks much
[02:04:35] <z64555> I'll give it a look over
[02:04:38] <rue_house> you can use the one point to get ends of lines
[02:04:58] <rue_house> setLine( &L, &p, &p);
[02:05:14] <rue_house> setLinePts, whatever, its all there
[02:05:22] <rue_house> *for the next 24 hours)
[02:05:45] <rue_house> RotAround is one of my favs
[02:06:55] <z64555> Better than DecomposeSquare!
[02:07:15] <rue_house> those last few fn's were a LOT of work.
[02:07:36] <rue_house> I had to sit down and think.
[02:27:34] <Anniepoo_> ok, good grief
[02:27:48] <Anniepoo_> finally found a controllable way to make spiral shells
[02:28:03] <Anniepoo_> Stupidly, in a youtube tutorial callec
[02:28:19] <Anniepoo_> "blender 2.72: low poly snail shell"
[02:28:28] * Anniepoo_ slams head on desk
[02:29:43] <synja> any pics of what you're working on Anniepoo_?
[02:30:27] <Anniepoo_> http://partyserver.rocks/anniepoo/snailinesspic.png
[02:30:36] <Anniepoo_> somewhat out of date render
[02:30:58] <Anniepoo_> https://www.instagram.com/p/BO-4wA-gnv0/?taken-by=anneogborn
[02:31:11] <Anniepoo_> and scroll back one or two pix,
[02:31:16] <Anniepoo_> this is the innerds
[02:31:53] <synja> pretty neat. instagram is taking forever to load tho
[02:32:07] <Anniepoo_> sorry
[02:32:38] <Anniepoo_> well, I did my quota of robot work tonight, I'm happy I found this tutorial
[02:32:39] <synja> maybe it just doesn't like my os
[02:33:38] <Anniepoo_> 8cP who'd have thought making the snail's shell would turn out to be most difficult part of making snail?
[02:33:59] <synja> lol
[02:49:52] <Anniepoo_> well, too late at night, I'm computing from bed
[02:50:04] <Anniepoo_> I'll figure this out tomorrow
[02:50:20] <Anniepoo_> 8U9 but this looks nifty!
[02:51:27] <Anniepoo_> life is good - I have replacement for not-useful vacuum pump on the way, the printer's here, I think the 3D model issues are licked,
[02:52:03] <Anniepoo_> I think I've found a suitable radome material for the acoustic sensor
[02:52:09] <Anniepoo_> (FRG screen)
[02:53:44] <Anniepoo_> and I'm at least getting happier about the sensor suite
[05:47:18] <pokmo> with this mechanism, if the u joint in the centre could move vertically, would it have 4DOF?
http://i.imgur.com/ua89MkW.png
[05:50:40] <veverak> should be
[05:51:00] <veverak> damn it
[05:51:05] <deshipu> then it would be underactuated
[05:51:08] <veverak> been thinking about building something lik ethis for a long time
[05:51:10] <veverak> :D
[05:51:30] <deshipu> you can make your robot do that
[05:51:43] <deshipu> act as a stewart platform
[05:51:57] <Jak_o_Shadows> Yeah. If it could move vertically, you'd get some sort of strange coupling that'd be dependent on the stiffness of things
[05:52:48] <veverak> deshipu: I know, it should be able
[05:52:57] <veverak> I mean, the code allows it, not tested yet ;)
[05:53:11] <deshipu> I need to do body ik for tote
[05:53:14] <deshipu> that's on my todo
[05:53:21] <deshipu> it's trivial, but I never did it
[05:53:30] <Jak_o_Shadows> I need to a) fix the 3D printer b) figure out my leg geometry for the quadrapod
[05:53:38] <Jak_o_Shadows> Just in general things. I'll design the models later
[05:53:44] <deshipu> I only have horizontal shifts and rotation aroudn the vertical axe
[05:54:12] <deshipu> Jak_o_Shadows: are you going lizard, spider or mammal?
[05:54:23] <veverak> deshipu: hmm, i have finished python IK for that
[05:54:33] <Jak_o_Shadows> mammal. Wait, what's the difference between lizard and mammal?
[05:54:37] <veverak> should allow 6DOF for the body
[05:54:47] <deshipu> Jak_o_Shadows: lizards have the legs on the sides
[05:54:55] <deshipu> Jak_o_Shadows: and the first joint moves up/down
[05:55:41] <deshipu> Jak_o_Shadows: it's like a flattened mammal
[05:55:53] <Jak_o_Shadows> The shoulder joint? Or the elbow/knee?
[05:56:50] <deshipu> the shoulder goes up/down, the next one goes forward/backward, and the third one goes inside/outside
[05:57:49] <Jak_o_Shadows> ah.
[05:57:53] <Jak_o_Shadows> Well, I was going to look at a cat
[05:58:03] <Jak_o_Shadows> with a stewart platform as the spine
[05:58:03] <deshipu> ok, so mammal
[05:58:24] <deshipu> and 3dof legs? or 2dof?
[05:59:18] <Jak_o_Shadows> Shoulder, and knee. Not sure about doing an proper DOF for the ankle, and am decided about the other DOF at the shoulder.
[05:59:44] <Jak_o_Shadows> I'm thinking some sort of sprung ankle, and possibly a sprung, erm, roll DOF that's linked across the legs for one of the shoulder DOF
[06:00:41] <deshipu> with actuated spine that might work
[06:01:06] <pokmo> deshipu, but without the u-joint fixed, it wouldn't be able to yaw - right?
[06:01:29] <Jak_o_Shadows> Yeah. My immediate goal is to figure out the leg geometry. I don't want to mount the servos at the joints, I don't think it's the best way for this size robot
[06:01:48] <deshipu> pokmo: it would do a random thing, possibly partially yaw, partially rise/lower
[06:02:18] <deshipu> Jak_o_Shadows: no, pushrods are better, but then the angle calculations are trickier
[06:02:41] <deshipu> Jak_o_Shadows: have you seen the cheetah cub robot?
[06:02:56] <pokmo> random? as in the motion would be unpredictable?
[06:03:17] <deshipu> pokmo: yes, you have an underactuated system, you don't have full control
[06:03:29] <pokmo> right...
[06:03:30] <deshipu> pokmo: because you have 4 degrees of freedom, but only 3 actuators
[06:03:56] <pokmo> but helicopter swashplates also have 3 actuators but 4DOF right?
[06:04:06] <deshipu> no
[06:04:09] <deshipu> they have 3 dof
[06:04:25] <deshipu> the 4th dof is the tailrotor
[06:05:05] <pokmo> deshipu, the swashplate moves vertically, yaw, pitch, roll. no?
[06:05:16] <deshipu> no yaw
[06:05:18] <pokmo> http://heligodspullzone.australianitandc.netdna-cdn.com/data/attachment-files/2014/12/2496_DSC_0032-L.jpg
[06:05:24] <pokmo> oh right. you're right
[06:05:30] <pokmo> the bracket holds it
[06:06:21] <pokmo> is there a relatively simple mechanism for 4DOF with 4 actuators?
[06:06:30] <Jak_o_Shadows> Yeah, deshipu, push-rods.
[06:06:31] <pokmo> with 4 arms
[06:07:00] <Jak_o_Shadows> Is there any reason you just can't do a stewart platform with equispaced linear actuators?
[06:07:15] <Jak_o_Shadows> oh wait.
[06:07:20] <deshipu> do the 3dof one, and add a 4th actuator on top?
[06:07:34] <Jak_o_Shadows> Yeah. Just say, bugger it, and make it serial
[06:08:33] <pokmo> hmm
[06:11:14] <deshipu> I think easiest is to do the swashplate and add yaw
[06:11:30] <deshipu> just rotate the whole thing
[06:11:37] <veverak> FPGA project accepted
[06:11:40] <veverak> next();
[06:11:44] <Jak_o_Shadows> Probably the most compact
[06:11:59] <veverak> but hey, have to say that verilog is ... verilog
[06:14:35] <deshipu> it is veri, veri, veri log
[06:40:00] <veverak> yup
[06:59:37] <mun> could pokmo's link
http://i.imgur.com/ua89MkW.png be built using servos rather than linear actuators?
[07:00:01] <deshipu> sure, servos and pushrods
[07:00:25] <deshipu> just search youtube for stewart platforms
[07:01:49] <deshipu> https://www.youtube.com/watch?v=1jrP3_1ML9M
[07:01:55] <deshipu> this one is nice, 6DOF
[07:02:22] <Jak_o_Shadows> deshipu, do you know if anybody has gone backwards? Has rotary poteiometers, connected similarly to how you'd connect servos ifyou were driving it, and then getting the position of the top platform?
[07:03:29] <veverak> damn
[07:03:34] <veverak> now I want to build it
[07:03:38] <veverak> but I don't hav eany purpose for it
[07:03:53] <deshipu> Jak_o_Shadows: like this?
https://www.youtube.com/watch?v=V2YWA2xH0oA
[07:04:27] <veverak> but
[07:04:29] <deshipu> Jak_o_Shadows: No, I don't think anybody did that
[07:04:34] <veverak> if I would like to test TOTE with proper IMU
[07:04:46] <veverak> it would be nice to put it on stewart platform to create forces on tha tIMU
[07:04:47] <deshipu> veverak: you could make a controller for Tote :)
[07:04:48] <veverak> hmm
[07:04:50] <veverak> :)
[07:04:52] <veverak> deshipu: !
[07:04:54] <veverak> :D
[07:05:11] <Jak_o_Shadows> Yeah, like that I think deshipu, but you know, an actual model.
[07:05:24] <mun> deshipu, but with linear actuators, if you lock two of the arms and actuate just one, the platform will yaw. with servos, locking two arms and actuating just one won't yaw, right?
[07:05:28] <deshipu> Jak_o_Shadows: actual model?
[07:05:35] <Jak_o_Shadows> Like, maths.
[07:06:24] <deshipu> Jak_o_Shadows:
https://www.youtube.com/watch?v=J0QlPfTmwcw
[07:06:39] <Jak_o_Shadows> Also, I've seen so many stewart platforms, but so few that examined the workspace without trial and error
[07:07:18] <deshipu> the first link has some heavy maths
[07:07:43] <Jak_o_Shadows> What,
https://www.youtube.com/watch?v=1jrP3_1ML9M ? It has a spreadsheet, didn't see much maths
[07:08:01] <deshipu> well, it does the kinematics
[07:08:11] <Jak_o_Shadows> You can do the forward kinematics pretty easy if you have linear potentiometers, but not sure about rotary
[07:08:20] <Jak_o_Shadows> It's a stewart platform, the IK is the easy bit :P
[07:08:33] <deshipu> converting rotatry to linear is just basic trigonometry
[07:09:21] <deshipu> and if you have forward kinematics, in the worst case you can do digital integration to get the inverse
[07:09:40] <Jak_o_Shadows> It has been about a year since I last looked at it
[07:10:04] <deshipu> but you can probably have a closed form solution
[07:10:26] <Jak_o_Shadows> The problem is that you can't just convert rotary to linear if you have the potentiometer at the same joint people put the servos
[07:10:31] <mun> the math for stewart platform is fairly complex to compute on a 8bit processor, right
[07:10:34] <Jak_o_Shadows> Cause you don't know the top point.
[07:10:41] <veverak> mun: yup
[07:10:43] <mun> i'm guessing it heavily relies on trig functions
[07:10:49] <tsglove> Jak_o_Shadows, what is "IK" in a Stewart Platform?
[07:10:50] <veverak> on the other hand, ARM A0 starts to be really cheap
[07:10:57] <Jak_o_Shadows> Also, pretty sure there isn't a closed form for the FK, een if you have linear pots
[07:11:12] <Jak_o_Shadows> IK - have end effector position (top position), work out the required joints.
[07:11:20] <Jak_o_Shadows> FK - have joit positions, work out the end effector
[07:11:26] <deshipu> Jak_o_Shadows: you don't know the top point with linear either
[07:11:29] <mun> veverak, how much are they?
[07:11:37] <tsglove> Jak_o_Shadows, ah ok. Thank you. I'm a n00b at all of thise.
[07:11:39] <tsglove> *this
[07:11:56] <Jak_o_Shadows> No, but you know the length of each leg directly. So then it's just 6 equations, 6 unknowns straight away.
[07:12:10] <veverak> mun: 2$ for the cpu itself
[07:12:18] <Jak_o_Shadows> Which you can just do newton raphson iteration, dead easy, cause the jacobian is RELATIVELY straightforward.
[07:12:18] <veverak> with reabkout board propably more expensive
[07:12:21] <deshipu> Jak_o_Shadows: scroll to 5 minutes, he does IK then
[07:13:16] <mun> hmm
[07:13:20] <Jak_o_Shadows> veverak, you can get little arm M3's for about $3.50
[07:13:40] <deshipu> Jak_o_Shadows: and in the comments you have the link to his program
[07:14:37] <Jak_o_Shadows> I didn't see anywhere where he changed the servo angle, and he got the top platform position.
[07:14:57] <Jak_o_Shadows> That number he's got is what angle the servo is mounted?
[07:15:11] <deshipu> Jak_o_Shadows: that's just forward kinematics, no?
[07:15:24] <deshipu> Jak_o_Shadows: that's the easy one
[07:15:54] <Jak_o_Shadows> Is it?
[07:16:03] <deshipu> is it not?
[07:16:58] <deshipu> he does that at the very beginning of the video
[07:17:09] <deshipu> the vertical sliders are the servo positions
[07:17:37] <deshipu> or maybe not
[07:17:47] <deshipu> anyways, it's not rocket science
[07:20:42] <Jak_o_Shadows> Vertical sliders are the DOF of the end-effector
[07:20:53] <Jak_o_Shadows> No, but it's not trivial. And I haven't seen an example
[07:21:13] <Jak_o_Shadows> My approach was going to be to mount the rotary pots, as sensors, at a higher joint. So not the base one, the middle one.
[07:22:22] <deshipu> I think it doesn't matter which angle you have in that triangle.
[07:22:37] <deshipu> as long as you have two sides and an angle, you know the whole triangle
[07:23:20] <deshipu> though some will give you better range than others
[07:24:04] <Jak_o_Shadows> ah! But if you mount it at the bottom, you don't have any angles of the triangle
[07:24:17] <Jak_o_Shadows> You have an exterior angle, which tells you squat all about the interior one.
[07:24:58] <deshipu> I mean the angle between the two ends of the servo arm and the tip of the pushrod
[07:25:04] <deshipu> s/angle/triangle
[07:25:45] <deshipu> you know the lenth of the pushrod, you know the length of the servo arm, you know the angle of the servo -- you can calculate the remaining side
[07:25:55] <deshipu> from law of cosines
[07:26:22] <Jak_o_Shadows> Um, I THINK you're still wrong (through I had to draw a diagram to convince myself).
[07:26:34] <Jak_o_Shadows> I gtg, but remind me tomorrow, and I'll draw a diagram to try to explain myself.
[07:29:18] <veverak> starting basic code strategy
[07:29:21] <veverak> SIMPLIFY
[07:32:47] <deshipu> remove every second line
[07:32:56] <deshipu> then remove any line with an error
[07:33:01] <deshipu> repeat until no errors
[07:39:48] <veverak> :D
[09:16:00] <rue_house> what, what are you trying to do?
[09:17:11] <rue_house> is this the servo/platform thing?
[09:17:29] <rue_house> you dont consider the servo angle, you consider the linkage length from the base
[09:17:47] <rue_house> the angle is a co-inncodince of how you made the length
[09:18:17] <rue_house> in my 2d library, use 'elbow' to solve the length
[09:31:45] <Anniepoo_> thinking about names
[09:32:07] <rue_house> squirrely
[09:32:29] <rue_house> it emboies the amount of sense things make these days
[09:32:34] <rue_house> enbodies
[09:32:38] <Anniepoo_> "Escargot" is the obvious one. Has two problems
[09:32:41] <Anniepoo_> LOL
[09:32:49] <Anniepoo_> Yes, it does
[09:33:16] <rue_house> "so, your NAME is squirrley, but your a snail....?"
[09:33:23] <Anniepoo_> problem 1, seems like a masculine name, a bit, and I'm thinking 'she'
[09:33:38] <rue_house> squiilette
[09:33:45] <rue_house> squirlette
[09:33:48] <Anniepoo_> 2. had considered having her have strong opinions on the eating of snails
[09:33:48] <rue_house> arg, keybaord!
[09:33:52] <Anniepoo_> LOL
[09:34:16] <Anniepoo_> yes, an absurdist name would be fun!
[09:34:26] <rue_house> like a revese of the toaster on red dwarf?
[09:34:42] <Anniepoo_> ok, #2 I can forget, seems too morbid for children's thing
[09:34:59] <Anniepoo_> hmm... don't know the toaster on red dwarf
[09:35:05] <rue_house> !!!!!
[09:35:11] * Anniepoo_ doesn't watch TV
[09:35:23] <rue_house> oh, find the toaster scene
[09:35:27] <Anniepoo_> ok
[09:36:07] <rue_house> https://www.youtube.com/watch?v=LRq_SAuQDec
[09:37:42] <Anniepoo_> no crumpets
[09:38:26] <Anniepoo_> no toast
[09:39:13] <Anniepoo_> 8cD
[09:39:17] <rue_house> :)
[09:39:28] <Anniepoo_> 8cj
[09:42:28] <Anniepoo_> Pomatia is the species name for garden snails
[09:43:07] <Anniepoo_> Ooh, I should give her a french accent
[09:48:58] <rue_house> nonon not french
[09:52:50] <Anniepoo_> Oui bien sûr. Parler avec un mauvais accent français est toujours comique.
[09:55:10] <Anniepoo_> 8cD
[09:55:36] <Anniepoo_> but probably a pain to find a good voice
[09:55:47] <Anniepoo_> 8cD I discovered a muppet voice
[09:55:52] <Anniepoo_> it's Grover, I'm sure
[09:56:19] <Tom_L> what is all this 8cj 8cD about?
[09:56:51] <Tom_L> some sort of secret expression code...
[09:57:13] <Anniepoo_> oh, just my smileys
[09:57:49] <Anniepoo_> https://github.com/Anniepoo/prolog-examples/blob/master/emoticons.pl
[09:58:12] <Anniepoo_> there's a parser
[09:58:47] <Anniepoo_> L8) Now I'm president
[09:58:51] <Tom_L> <=>
[10:00:34] <robopal> haha
[10:02:01] <Anniepoo_> scary part is, I've now infested the prolog community enough with these things that
[10:02:55] <Anniepoo_> this code's been forked twice and included in relatively important software - Wouter Beek's comprehensive DCG set, and yesbot, the bot on ##prolog
[10:08:17] <Anniepoo_> LOL - had an idea, was going to vacuum form orange hair. Checked amazon, there's dozens of them already.
[10:10:04] <rue_house> no snow tires on work van
[10:10:07] <rue_house> and its snowing
[10:11:20] <Tom_L> better stay home
[10:12:22] <rue_house> even one accident costs more on the group insurance than a day of work
[10:12:34] <rue_house> so they prefer we keep the vans off the road
[10:16:48] <Anniepoo_> 8c) if yer gettin' paid it's good!
[10:19:35] <rue_house> na, but I'm ok
[10:25:26] <rue_house> z64555, you alive?
[10:34:43] <pokmo> does anyone know how the camera lens cover mechanism usually works?
[10:34:58] <pokmo> like this
https://youtu.be/iG1LsGRwqv0?t=21s
[10:35:09] <pokmo> how do the covers open?
[10:36:35] <Anniepoo_> look up 'how to fix' videos for it
[10:37:16] <Anniepoo_> they'll demo how to get it opne, and provide shots of the innerds
[11:04:15] <robopal> pokmo, I have a similar issue with an old photocamera
[11:04:46] <robopal> I gave up after I felt the shock of the flash capacitors because I didn't pay attention
[11:04:58] <robopal> "screw this"
[11:05:00] <robopal> :D
[11:05:43] <pokmo> but is the cover driven by a motor?
[11:06:13] <robopal> what else
[11:06:44] <pokmo> robopal, perhaps some sort of spring mechanism?
[11:06:57] <pokmo> that retracts when the lens protrudes
[11:11:26] <robopal> I see a lot of info on youtube on that, what exactly is wrong with yours?
[11:13:02] <pokmo> oh, mine's fine. i'm just curious about how the mechanism works
[11:13:13] <robopal> ah
[11:13:40] <pokmo> don't know if it's motor driven
[11:14:56] <robopal> https://youtu.be/LJv_ZBmK3Tw?t=3m55s
[11:19:37] <pokmo> robopal, thanks
[11:19:47] <pokmo> hmm looks like his didn't have a cover?
[11:20:03] <robopal> later in the video it shows
[11:22:24] <robopal> a lever is forcing it to close, as the lens retracts inside the camera, otherwise it is kept open by a tiny spring we can't see inside the plastic casing
[11:24:13] <robopal> possibly something like that:
https://media.midwayusa.com/productimages/880x660/Primary/773/773782.jpg
[11:24:49] <pokmo> robopal, you're right. it looks like a spring mechanism
[11:25:08] <pokmo> the lever is somehow pushed when the barrel retracts
[11:25:12] <robopal> similar to 3.5" floppies if you remember
[11:27:09] <pokmo> robopal, i've always wondered how floppies shutter are opened
[11:30:23] <robopal> :D
[11:30:42] <robopal> you are young?
[11:31:21] <robopal> I remember I liked to dissasemble failed floppy diskettes
[11:31:36] <robopal> there was something satisfying to it
[11:34:26] <pokmo> i mean, how the floppy drive opens the shutter
[11:35:35] <robopal> I think in a similar way, as you pushed the disk in, it forced the cover open and exposed the magnetic surface to the head
[11:35:58] <robopal> you can probably google that also
[11:49:38] <pokmo> Yeah
[12:10:53] <synja> lol robopal could have just discharged the capacitors first
[12:11:21] <synja> i loved floppy diskettes. still use them for makeshift IR filters
[13:44:13] <rue_house> yes, my attempt to make an interrupter disk from a floppy, was, well, a flop
[13:44:48] <rue_house> but, realize that floppies aren't made anymore, and that for people doing retro computing, they are worth their weight in gold
[13:51:48] <z64555> but rue, they only weigh a few ounces
[14:08:32] <rue_house> z64555, I'm stuck at home
[14:08:55] <rue_house> at some point soon I have to go make a snowman
[14:08:59] <z64555> should I send a rescue team?
[14:09:20] <z64555> because you'd be outta luck, then
[14:09:38] <rue_house> no, but if you want to know how to maniplulate 3d or 2d points for somehting, nows the time
[14:10:07] <rue_house> did you look that library over?
[14:11:10] <rue_house> you cant do it now just so you can say yes
[14:11:27] <synja> ...
[14:12:56] <rue_house> are you trying to code up a solution now so you can say we dont need to?
[14:19:11] <rue_house> yay, the 2nd object is done
[14:32:46] <z64555> I looked it over, I understand the concepts, but my brain's having a difficult time processing the per-component math for some reason
[14:36:27] <synja> what are you working on rue_house?
[14:36:57] <Tom_L> he's working on not working
[14:37:29] <synja> even that can be difficult sometimes :p
[14:53:26] <rue_house> no I was trying to help get a semi unstuck from the hill that keeping me from getting to work
[14:53:31] <rue_house> (the hill not the semi)
[14:53:52] <rue_house> its chains broke and it cant get a grip, nomatter how much shoveling w do
[14:54:00] <Tom_L> get a bigger run at it
[14:54:57] <z64555> Use a pickup truck with chains?
[14:55:22] <synja> cat litter, rue_house
[14:55:24] <synja> might help
[14:55:33] <synja> also planks parralel to the truck
[14:55:36] <synja> under the tires
[14:55:46] <synja> while being towed with a tractor or something else
[15:02:57] <rue_house> if that truck goes backwards its gonna end up on its side at the bottom
[15:03:15] <rue_house> yea, no snow ploughs, no tractors
[15:03:29] <rue_house> :( not even a 12' mecha
[15:03:40] <synja> do you have boards around?
[15:03:43] <synja> or a cat?
[15:03:44] <rue_house> nope
[15:04:01] <synja> the litter does help
[15:04:05] <rue_house> its a full length semi
[15:04:13] <rue_house> luckily its empty
[15:04:17] <synja> just needs a tiny bit of traction
[15:04:29] <rue_house> no, it needs a ****load of traction
[15:04:37] <synja> lol it prob would have made it if it was full
[15:04:48] <rue_house> and it also needs to not be up against a 20' drop at the side of the road
[15:04:56] <rue_house> all his chains broke
[15:05:12] <synja> so you don't have any litter?
[15:05:18] <rue_house> not enough for that mess
[15:05:27] * rue_house codes
[15:05:47] <rue_house> the next object needs to get a serial port from the user
[15:05:49] <synja> just enough under the wheels to get a bit of traction
[15:06:04] <synja> then the momentum will take over, hopefully
[15:06:11] <rue_house> we already shoveled the ashphault clean, and that wasn't enough
[15:06:31] <synja> either use the litter or don't complain about it :P
[15:06:38] <rue_house> its not my problem
[15:06:44] <rue_house> and I tried
[15:06:47] <synja> if you can't get out, it is
[15:07:02] <rue_house> I couldn't make that hill in half this much snow
[15:07:12] <rue_house> and even if I did, I couldn't make the next hill after it
[15:07:49] <synja> give him the litter and ask for $10 to cover it
[15:07:50] <rue_house> a pickup slid sideways over the band before the semi got stuck too
[15:08:12] <rue_house> he was on the phone when I left
[15:08:31] <rue_house> someone who owns the business can fork up, he's just a worker
[15:08:56] <rue_house> I WOULD take him a hot chocolate, but I'm apparently out
[15:09:59] <synja> well, if you feel you've done enough to help him...
[15:10:14] <synja> i guess i'm just from an area where we don't give up
[15:16:49] <rue_house> well, this would be the joke of the town anywhere that has snow on any normal basis, esp in canada
[15:17:07] <rue_house> there's about 3", and its pandemonium
[15:23:22] <rue_house> **** me, if I had an 8' hexapod right now I could go to the store and get MILK
[15:24:09] <rue_house> wait, whats my supply of scrap and welding rod like right now...
[15:48:30] <delinquentme> wondering if this:
http://www.ebay.com/itm/172446666110?_trksid=p2057872.m2749.l2649&ssPageName=STRK%3AMEBIDX%3AIT ... will allow me to reliably step down the voltage from a 24v 20amp PSU
[15:48:37] <delinquentme> I need a steady ~7v
[15:49:21] <rue_house> is it a chinese 24V psu?
[15:50:03] <rue_house> otherwise, yea, it would
[15:50:04] <delinquentme> yeap
[15:50:18] <delinquentme> its a DMiotech
[15:50:30] <rue_house> you can prolly dial the 24 to 7 then
[15:50:45] <rue_house> those chineese supplies are insane that way
[15:51:09] <rue_house> (7V would not be the best operating point for a 24V supply tho)
[15:51:23] <delinquentme> lulz
https://www.walmart.com/ip/DMiotech-DC-24V-20A-480W-Power-Supply-Switching-Converter-for-LED-Strip-Light/182267579
[15:51:25] <synja> lol that would be badass rue_house
[15:51:28] <delinquentme> apparently walmart sells these?
[15:51:33] <synja> <rue_house> **** me, if I had an 8' hexapod right now I could go to the store and get MILK
[15:51:53] <synja> and 3"? yeah that's nothing :P
[15:51:54] <rue_house> yes, dont be surprised if they dial down to 5V
[15:52:25] <rue_house> why would a $10 supply be $70 from wallmart?
[15:52:31] <rue_house> they really have that much markup?
[15:52:54] <synja> i wouldn't think it would be _that_ high of a markup
[15:52:57] <delinquentme> Oh rue ... i have the big PSU running @ 24v ... and then a line from that going to this:
http://www.ebay.com/itm/172446666110?_trksid=p2057872.m2749.l2649&ssPageName=STRK%3AMEBIDX%3AIT
[15:52:58] <synja> maybe 30%
[15:53:00] <delinquentme> and thats reducing the 24v to 7
[15:53:21] <delinquentme> ideally I think iw ant a switching buck converter ... but I need this working asap :D
[15:53:44] <rue_house> wow those wallmart prices are insane!
[15:53:52] <delinquentme> ^^
[15:53:58] <rue_house> ly high
[15:54:05] <delinquentme> good old american made!
[15:54:07] <synja> we would all like that delinquentme
[15:54:10] <synja> expensive though
[15:54:13] <delinquentme> its worth the price
[15:54:27] <synja> hell yeah
[15:54:39] <delinquentme> synja, I found a few decent ones on ebay ... but my purchaser bought me the wrong part lulz
[15:54:41] <delinquentme> SIGH.
[15:54:47] <synja> lol
[15:55:02] <synja> if you want something done right, do it yourself
[15:55:05] * synja heavy sigh
[15:55:09] <delinquentme> ^^^^
[15:57:34] <rue_house> so I'm breaking trend on the app I'm writing
[15:57:54] <rue_house> the first menu on the left is App, not file, from App you can get to Exit
[15:58:02] <rue_house> maybe should be terminate
[15:58:12] <rue_house> WHO THE HELL CAME UP WITH THE TERMS WE USE TODAY!?
[15:58:53] <rue_house> to terminate an application you should not click on File->Exit
[15:59:00] <rue_house> lets think about this....
[16:00:21] <rue_house> delinquentme, thats not american made....
[16:00:37] <rue_house> thats obviously one from china
[16:01:12] <rue_house> should I check and see if my generator works now, or wait till the power outage?
[16:01:45] <rue_house> (a tree is gonna break and take out a power line somewhere, probably soon)
[16:02:06] <synja> do you have a breaker switchover?
[16:02:23] <rue_house> no I use scuicide cords
[16:02:32] <synja> lol yeah
[16:02:45] <synja> either way, better to check now
[16:02:58] <synja> don't want your pipes to freeze so you may have to improvise
[16:03:19] <rue_house> its 1c out right now
[16:03:51] <rue_house> or I should go build a snowman
[16:04:13] <synja> child at heart, eh?
[16:04:29] <rue_house> if Trump brings about the epocolypse, I may not have another chance.
[16:04:53] <rue_house> hard to snow with molten lava all over the place
[16:05:04] <synja> the times, they are a changin
[16:05:37] <rue_house> well, with Hilory we could have a nuclear winter, between the two, I'm not sure
[16:06:33] <synja> don't worry. i'm sure there's an evil genius out there working on destroying humanity
[16:06:45] <rue_house> yea, his name is Trump
[16:07:02] <rue_house> he's kinda popular, you should really keep more of an eye on the media ya know
[16:08:02] <synja> he doesn't want to destroy humanity; he just wants to destroy his opponents
[16:09:01] <rue_house> why is my seller being given 41 days to ship my order?
[16:09:19] <rue_house> whats going on in china!?
[16:09:29] <synja> b/c you're a cheapskate who orders the product from the cheapest seller
[16:09:35] <synja> i would know. i'm one too
[16:09:50] <synja> there's a chinese holiday or something
[16:09:58] <rue_house> I thought its over?
[16:10:08] <rue_house> oh, maybe on the 17th
[16:10:09] <rue_house> oops
[16:10:31] <rue_house> directive 7: DO NOT ORDER FROM CHINA DURING CHINESE NEWYEARS
[16:14:19] <Tom_L> hah getting acad 2017
[16:14:59] <synja> idk even epackets are fairly quick
[16:15:25] <synja> i find that the time span is arbitrary, just so people won't be disappointed when it arrives early instead of late
[16:15:37] <synja> which works for me
[16:17:58] <rue_house> Tom_L, I thought they changed up the name
[16:18:19] <Tom_L> dunno
[16:18:26] <Tom_L> student ver
[16:18:38] <Tom_L> that's what they're using
[16:18:43] <rue_house> my 'select a comm port' dialog box breaks if the machine has no serial ports
[16:18:52] <rue_house> dont know quite how to handle that one
[16:18:53] <synja> arggg, i be sailing the high seas
[16:18:56] <Tom_L> it should
[16:19:02] <synja> no exceptions
[16:19:04] <synja> :P
[16:20:36] <rue_house> synja, how are you with python?
[16:21:01] <synja> pretty good
[16:21:17] <rue_house> wanna play with my dialog?
[16:22:12] <synja> sorry. i'm already procrastinating on my own projects :P
[16:22:21] <synja> just add an exception for serial connection though
[16:22:29] <synja> with a retry button or something
[16:22:34] <synja> idk
[16:23:12] <rue_house> you can help me and still procrastinate on your own projects
[16:24:36] <synja> there is no fun in programming for me
[16:24:55] <synja> been that way for 2 decades
[16:24:56] <rue_house> oh I just assumed you were a recreational coder
[16:25:20] <synja> means to an end, my friend. means to an end
[16:25:34] <rue_house> you know, good coders never die,
[16:25:40] <rue_house> their just cast to void
[16:25:54] <synja> heh. i knew something like that was coming
[16:27:49] <Tom_L> i learned how the windows version of my program's print system works today
[16:28:10] <Tom_L> might inspire me to rewrite it in windows now
[16:29:11] <Tom_L> then again it might not...
[16:32:22] <synja> the only time i ever program in a win environment is when i'm being paid to do it
[16:32:41] * synja shudders to think about it
[16:32:51] <synja> shudder or shutter?
[16:33:05] <synja> must be the former..
[16:54:34] <rue_house> ok I did a standard issue snowman
[16:59:24] <synja> oh common you live in vancouver and you're complaining about 3"?
[16:59:35] <synja> i would have thought you'd be used to more than that
[17:02:22] <robopal> yeah
[17:12:21] <rue_house> no, I live on the sunshine coast
[17:12:32] <rue_house> find sechelt on a map
[17:12:44] <rue_house> they still havn't ploughed the roads
[17:13:02] <rue_house> but its snowing again, so whatever
[17:14:32] <rue_house> http://ruemohr.org/~ircjunk/images/p1080754.jpg
[17:14:37] <rue_house> THATS a cheesy smile
[17:15:11] <rue_house> really couldn't find a better hat...
[17:22:54] <rue_house> the next object is for the cnc machine itself
[17:23:44] <rue_house> its some kinda controlled dialog engine
[17:51:22] <synja> lol nice snowman
[17:51:22] <z64555> ...is that a cheeto for a smile?
[17:51:29] <synja> looks like a cheese stick
[18:06:17] <rue_bed> its a slice of my going-bad-faster-than-i-can-eat-it cheese
[18:07:13] <synja> heh
[20:32:17] <rue_house> hmmm methods for a stopwatch...
[20:32:21] <rue_house> start
[20:32:22] <rue_house> stop
[20:32:24] <rue_house> reset
[20:32:27] <rue_house> explode
[20:32:36] <rue_house> ... yup... ok
[20:32:49] <rue_house> ohohohohoh, update.
[20:33:48] <rue_house> turn the music up till I cant hear myself think, used to be easier
[20:34:48] <rue_house> gee preimportality is a long road...
[20:44:08] <rue_house> arg, volume maxed out and the music isn't getting to the part of my brain I need it to
[20:52:34] <joga> heh, I was just listening to this for nostalgia.. it at least punctures the brain somewhat
https://www.youtube.com/watch?v=JQ3Qg3ora2I
[21:09:22] <mun> anyone know how camera shutters are stopped?
[21:09:31] <mun> i'm guess they're driven by motors rather than servos
[21:23:47] <z64555> rue_house: stop watches also have a "lap time" button, it pauses the display so you can see/record the time
[21:23:54] <z64555> but the timer is still running
[22:44:34] <rue_house> dont think the cnc needs a lap time
[22:45:02] <rue_house> mun, there should be a switch or optical sensor that determines if its open
[22:45:20] <rue_house> world is gonna end, I'm out of tea...
[22:46:19] <rue_house> this project is teaching me too much about python
[22:46:58] <mun> rue_house, would an optical sensor work? there might not necessarily be light going through the lens
[22:48:19] <rue_house> optical gate
[22:48:33] <rue_house> ir beam that the shutter breaks
[22:49:14] <mun> right
[22:50:15] <mun> rue_house, but that'd only work if the back of the shutters reflect IR, right?
[22:50:26] <mun> since when the shutters open, there'd be no reflection
[22:57:30] <rue_house> no
[22:57:43] <rue_house> you put a beam in the way of a part that blocks the beam when it moves
[22:57:58] <rue_house> power outage.... hmmm
[23:11:25] <synja> lol
[23:12:04] <rue_house> hmm, I need to work out how to make an object for the cnc machine
[23:12:24] <rue_house> I suppose it has a menu, step/run/pause/stop
[23:12:38] <rue_house> its got serial recieve events
[23:12:58] <rue_house> I wonder if the manual command input is part of that
[23:13:52] <rue_house> so, you create the object for it, which manifests as a manual input box,
[23:14:11] <rue_house> it adds things to the program menu
[23:14:36] <rue_house> it needs to have a serial port set
[23:15:02] <rue_house> I suppose the same way you pass a stringvar to a label
[23:16:38] <rue_house> or should the command input box be a different object
[23:16:45] <rue_house> that the cnc object ads to
[23:16:47] <rue_house> hmmm
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}