Back
[13:49:36] <z64555> whats a good general purpose servo? thinking about buying a pack of them to play with
[13:50:51] <z64555> specifically for walker bots and robot arms
[13:52:04] <z64555> ok maybe not so "general purpose" then
[13:52:34] <deshipu> I use the sg90 crap, because it's cheap
[13:53:01] <deshipu> it works well enough for small bots, and I don't have regrets gluing them and doing horrible stuff to them
[13:53:43] <deshipu> when I need a bit more torque (but nothing great), I use SG92R -- they are cheaper and lighter than MG90s, but about the same strength
[13:54:40] <deshipu> that works for guinea pig-sized robots
[13:55:43] <z64555> thx much
[13:56:26] <deshipu> make sure to get good power for them
[13:56:46] <deshipu> people often complain about sg90s being too weak, but they power them with 2 AA alkaline batteries...
[13:57:28] <deshipu> they can draw 500mA when stalled
[13:59:32] <z64555> well there's their problem, lol
[14:00:30] <z64555> I'll probably power and control them via a tether
[14:00:51] <deshipu> make sure your wires are not too thin :)
[14:01:05] <z64555> yup
[14:01:52] <z64555> I've got some stranded automotive cables leftover when I was working on the power grid for the quad
[14:02:11] <z64555> I forget the gauge, but it's the same stuff used on ESC's
[14:04:04] <deshipu> I recently found a nice bot based on those:
https://www.youtube.com/watch?v=-zOUz9VLRj0
[14:05:55] <Snert_> that's a good one. Load it up with better servos and it's worthy.
[14:16:34] <robopal> nice
[14:16:38] <robopal> love the paws
[14:16:48] <robopal> what is the board?
[14:17:34] <robopal> why the fool has put no description
[14:35:33] <Snert_> looks like a pi
[14:36:59] <Snert_> perhaps pi0
[15:20:12] <veverak> deshipu: interesting
http://www.roboticgizmos.com/diy-stompy-arduino-quadruped-robot/
[15:20:25] <veverak> remindes me of idea to shape tote into same "carrier" thingie
[15:20:34] <veverak> -> something that is made to cary things on top of it
[15:21:03] <veverak> 8 legs
[15:21:28] <anniepoo> I feel you rue, it's cold here, I don't want to be working
[15:21:42] <anniepoo> oops, sorry, that was from a while ago
[15:21:50] <anniepoo> howdy veverak
[15:25:17] <veverak> thesis is ...
[15:25:20] <veverak> well, takes a lot of time
[15:39:17] <deshipu> it's a gate ritual
[15:44:04] <veverak> deshipu: finally got draft of algorithm
[15:44:08] <veverak> got a moment? :)
[15:49:47] <deshipu> veverak: shoot
[15:49:55] <deshipu> veverak: sorry, I didn't review your code
[17:03:35] <TELunus> I'm trying to design a robot arm with more than 6 degrees of freedom, but I'm having trouble finding good gearmotors. All the ones I've been finding can't carry a reasonable weight (I've been compairing to their own weight, since I think some motors will have to be part way along the arm) at any reasonable distance. Any suggestions?
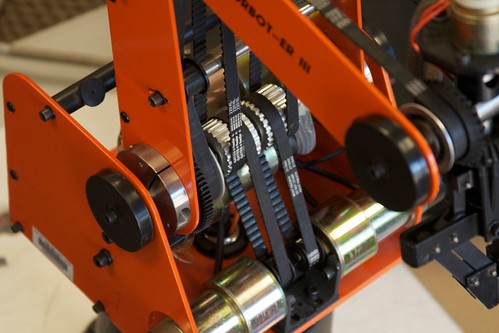
[17:05:47] <veverak> TELunus: afaik you can reduce weight of arm using belt system
[17:06:32] <TELunus> Baisically just try to get all my motors at the base?
[17:06:50] <veverak> yep
[17:07:43] <veverak> http://static.flickr.com/6029/5968563226_990b5525a7.jpg
[17:07:50] <veverak> can't find better photo
[17:07:52] <veverak> :/
[17:08:00] <veverak> "pulley system" seems to give some results
[17:08:56] <veverak> ok
[17:08:58] <veverak> http://www.senster.com/alex_zivanovic/armdroid/ this is complex
[17:09:38] <veverak> (I really like the differential :D )
[17:09:39] <TELunus> As far as I'm seeing that's a 4 DOF system. More than 6 means I need at least 7. I think I'm going to run into some issues trying to go that way.
[17:10:04] <veverak> really depends on how you positioned your axis
[17:10:08] <veverak> needless to say
[17:10:37] <veverak> even if you just move each motor from "it's axis" to "previous axis" you greatly reduce forces that will be applied on motors at base
[17:11:03] <veverak> and it's not about moving all the motors up to base, it's just that the more you can do this the better
[17:11:40] <deshipu> there is this thing:
https://hackaday.io/project/11583-odrive-high-performance-motor-control
[17:12:01] <veverak> I think one or two are on it's way to our hackerspace
[19:28:24] <veverak> hmm
[19:28:30] <veverak> I really like the new pi3 compute module
[19:28:36] <veverak> just don't know how to design thigns for it :D
[19:28:38] <veverak> but I wonder
[19:28:52] <veverak> how hard it would be to put multiple of them on one pcb and network them together
[22:30:30] <Anniepoo_> 8cD planning high level behaviors for the snail
[23:19:43] <SpeedEvil> https://www.youtube.com/watch?v=VTV23B5gBsQ on snails
{kind=link}