Back
[00:31:28] <rue_house> huh, apparently I'v never attached an lcd to a m328
[00:36:58] <rue_house> ok, for rs232, its apparently customary to use RI for power to a device
[00:37:06] <rue_house> db9 pin 9
[01:40:53] <Jak_o_Shadows> I should buy some veroboard board stuff
[01:41:05] <Jak_o_Shadows> That way I can solder up the db15s I have to something
[01:42:47] <Jak_o_Shadows> Not that I'm going to conect them like a normal gameport. No real point.
[02:22:49] <rue_bed> yea, I'm gonna use an RJ45 and find a curlie cord for it
[02:25:07] <deshipu> do the dead bug
[02:46:17] <Jak_o_Shadows> Yeah, for the DB15 actual cable, probably going to run 2 lots of 8 wire ethernet
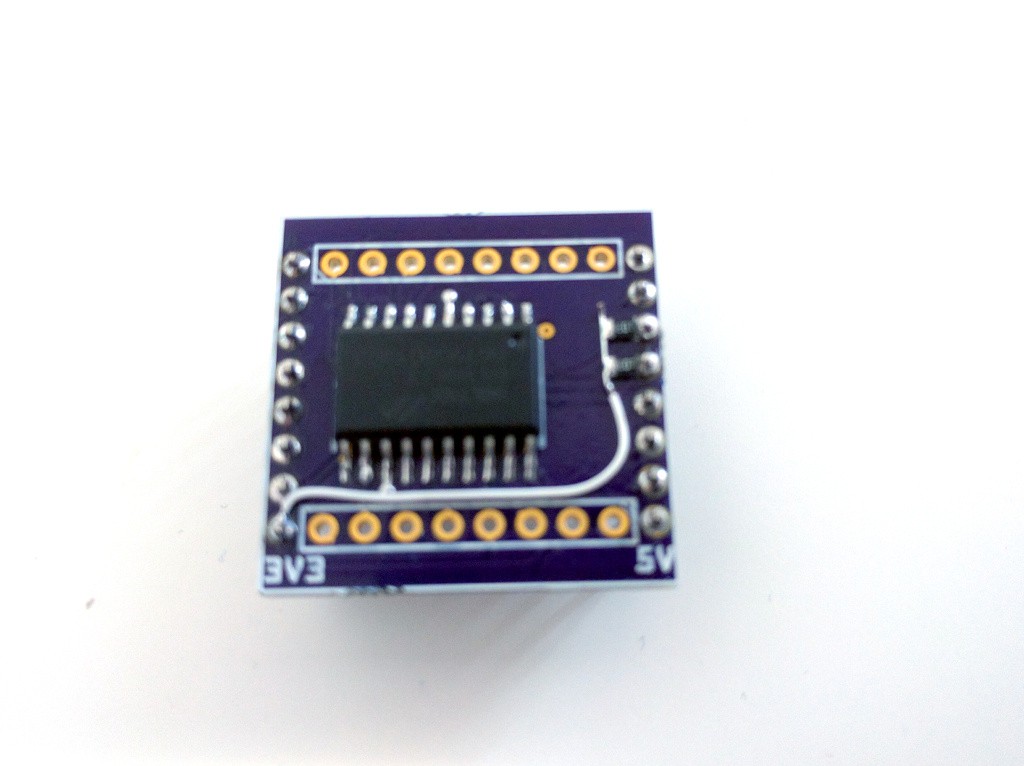
[03:03:31] <deshipu> what happens when you forget to include pullups on your pcb:
https://cdn.hackaday.io/images/1352491481704426643.jpg
[19:42:38] <pokmo> i'm trying to simulate the motion of some moving edges and vertices of a graph (it's actually a joint). some are fixed but some are not. does anyone know if there's any simple tool out there for this?
[20:41:48] <z64555> SolidWorks, perhaps
[20:42:23] <z64555> What's the nature of the movement? Since you said it's a joint, I'm thinking it's a rotation train
[20:43:22] <z64555> ...or whatever the actual term is for a system of rotating joints
[22:23:52] <jak_o_shadows> My OBD2 -> DB15 2 row cable arrived
[22:27:24] <z64555> hacking into your car's computer?
[22:28:32] <jak_o_shadows> Eventually.,
[22:28:44] <jak_o_shadows> I have a stm32f103, which has CAN hardware
[22:28:56] <jak_o_shadows> I just need a little bit more of the hardware, then apparently it's reasonably simple
[22:33:27] <z64555> purpose?
[22:40:30] <justanotheruser> basic question, what is the best way to mount a gear to a keyed shaft, does anyone sell keyed shaft-mounted-gears or should the pinion be sufficient to keep track
[22:40:38] <justanotheruser> s/keep track/not slip/
[22:41:40] <Tom_L> stock drive products sells lots of gears
[22:41:43] <Tom_L> sdp-si
[22:42:00] <Tom_L> i suppose mcmaster does too
[22:42:06] <justanotheruser> talking to me?
[22:42:19] <Tom_L> ur the one asking
[22:42:31] <justanotheruser> I ask whether you are because there is a type error
[22:42:34] <justanotheruser> I already use mcmaster, I'm asking what the mechanism is called
[22:42:50] <Tom_L> spline or keyway
[22:43:57] <Tom_L> http://cdn3.volusion.com/vyfsn.knvgw/v/vspfiles/photos/am-0186-2.jpg?1442240393
[22:44:28] <justanotheruser> oh I guess the ones on mcmaster tend to come that way anyways
[22:44:38] <justanotheruser> thanks
[22:46:42] <jak_o_shadows> z64555, for the fun of it
[22:47:05] <justanotheruser> can basically all gears be belt driven, or are certain kinds better designed to do so
[22:47:30] <Tom_L> belt driven??
[22:48:06] <z64555> gears mesh with gears, not belts nor chains
[22:48:13] <justanotheruser> oh
[22:48:36] <jak_o_shadows> what do youcall the ones that mate with chains, sprockets?
[22:48:58] <Tom_L> timing gears
[22:49:02] <z64555> jak_o_shadows: sprokets if they're solid, cog's if they're hollow like a wagon wheel
[22:49:14] <z64555> *sprockets and cogs
[22:49:16] <justanotheruser> I think sprockets yeah
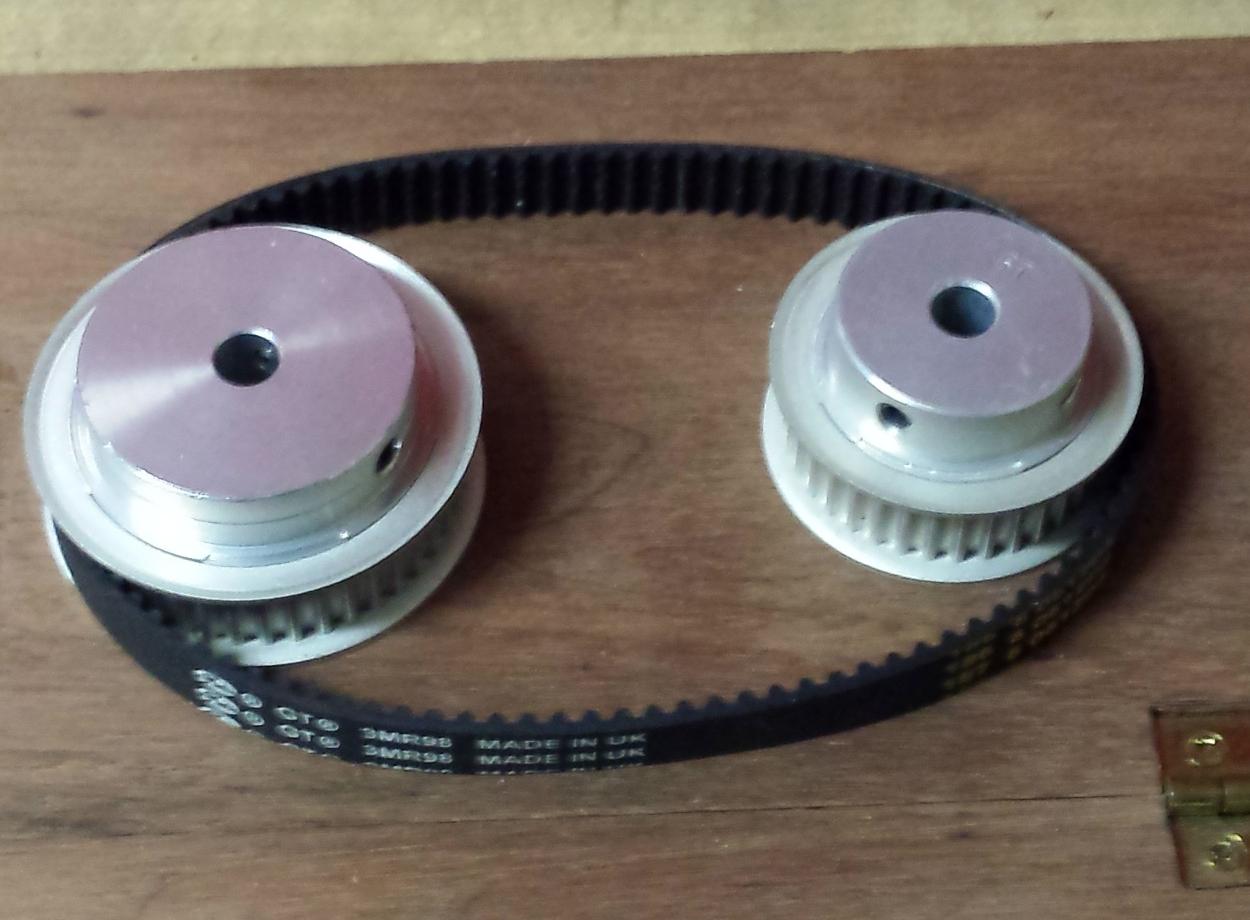
[22:49:25] <Tom_L> http://tom-itx.no-ip.biz:81/~webpage/cnc/new_pulleys/timing_pulley1.jpg
[22:49:34] <justanotheruser> is it near impossible to eliminate backlash if I use a belt?
[22:49:44] <z64555> yeah, timing pulley is the "gear" you were thinking
[22:50:21] <z64555> You'll still have backlash with a timing belt, but it will be miniscule compared with gears and chains
[22:50:57] <justanotheruser> how many arcsec roughly?
[22:51:22] <z64555> you'll have to experiment to find that out
[22:51:39] <justanotheruser> I'm wondering whether I should even incorporate it into my design if it has high backlash :p
[22:52:29] <orlock> just add a webcam for a feedback sensor loop that automatically compensates for it
[22:52:36] <z64555> lol
[22:53:01] <justanotheruser> I actually will probably do that
[22:53:07] <orlock> Ok
[22:53:09] <orlock> You do that then
[22:53:11] <justanotheruser> but not now
[22:53:26] <orlock> or use an optical encoder
[22:54:24] <orlock> quadrature encoder
[22:54:54] <justanotheruser> maybe I should just use a worm gear
[22:55:22] <z64555> still gonna have backlash
[22:55:28] <justanotheruser> much less though, no?
[22:55:30] <orlock> and more noise
[22:55:37] <orlock> well, different sort
[22:55:37] <justanotheruser> hmm
[22:55:41] <orlock> you'll have periodic error
[22:55:43] <justanotheruser> maybe I should just go gear to gear
[22:55:51] <z64555> still gonna have backlash
[22:55:53] <orlock> or
[22:55:55] <orlock> just do it
[22:55:57] <justanotheruser> but much less
[22:55:58] <z64555> just stick with the timing belt
[22:56:11] <justanotheruser> I need to research a bit, this is an expensive decision
[22:56:11] <orlock> WHat's it for, and why is accuracy so important?
[22:56:20] <justanotheruser> orlock: robot arm
[22:56:26] <z64555> he's trying to do dead reckoning on it
[22:56:43] <justanotheruser> %
[22:56:44] <justanotheruser> ^
[22:58:33] <justanotheruser> so basically I have 2 choices, either the robot base be 2ft long and go straight from motor shaft to the shaft the arm is mounted on (minimal backlash, but undesirable because 2ft long), or have the motor parallel to the shaft the arm is mounted to and have them connected by worm gear or timing belt or something
[22:58:38] <justanotheruser> making it only 1ft
[22:58:46] <justanotheruser> well mcmaster does refunds so I might as well experiment
[22:59:35] <justanotheruser> but a belt system seems unacceptable, I think I'll go gear to gear
[23:00:13] <justanotheruser> I'm guessing the best I can get is like 0.5mm backlash, which is maybe 1deg? depending on pitch
[23:06:46] <z64555> go for the belt
[23:08:20] <z64555> or otherwise make it so that you have a sensor that's on the movement arm instead of inside the motor
[23:08:52] <z64555> optical encoder, hall effect array, w/e
[23:09:06] <orlock> Whats the end use of the arm?
[23:09:18] <z64555> he's got a weight at the end of it
[23:09:20] <justanotheruser> I already have a servo, for now I will use that
[23:09:55] <justanotheruser> I don't want to sense with this much precision this early on
[23:10:22] <z64555> You'll lose precision if you put gearing between the servo and the arm
[23:10:25] <justanotheruser> yes, I have a weight of one week for this stuff to ship at the end of setting all this up
[23:10:48] <justanotheruser> z64555: isn't that what I'm doing here anyways?
[23:11:02] <z64555> pretty much
[23:11:18] <orlock> justanotheruser: Or go and buy somebody's crappy second hand EQ2 or EQ3
[23:11:30] <justanotheruser> dunno what that is
[23:11:56] <orlock> Telescpoe mounts with gear drives and knobs
[23:12:02] <justanotheruser> oh
[23:13:34] <justanotheruser> "A roller chain is made up of solid links, a solid link will never enter and exit a sprocket smoothly, without some slack in the chain, and if you tighten the chain , you get cogging, so you get one of two things, extreme backlash or cogging, both will reflect directly into the cut part, a no win situation"
[23:14:10] <jak_o_shadows> Hence you use roller chain for like, power
[23:14:41] <justanotheruser> http://ww2.gates.com/common/downloads/files/mectrol/brochure/GatesMectrol_Belt_Pulley_Catalog_5_11.pdf
[23:16:03] <z64555> hence you use roller chain in only one direction
[23:16:41] <z64555> or put your sensor on the piece that's having power transmitted to it so you can have your controller compensate the backlash
[23:20:34] <justanotheruser> the sensor is already in the servo motor
[23:20:39] <justanotheruser> don't want to deal with more than that atm
[23:22:37] <orlock> justanotheruser: If you reposition that sensor, then you can use that and the servo's feedback loop to autocompensate for slop
[23:23:01] <justanotheruser> how do I reposition the sensor lol
[23:23:05] <justanotheruser> Open up the motor and shit?
[23:23:16] <orlock> the servo, and yes
[23:23:25] <justanotheruser> nah, I don't wanna break it
[23:29:44] <Triffid_Hunter> justanotheruser: the GT2 belts that the 3d printer crowd are super keen on are designed for zero backlash, and practically have so little we can barely notice
[23:30:25] <jak_o_shadows> If you have funky lags it gets trickier (still doable) to control thoough
[23:30:30] <Triffid_Hunter> regular timing belts have backlash designed in to reduce wear, but GT2 and various other types of belt are designed for reciprocating linear motion where backlash is a problem
[23:32:59] <justanotheruser> Triffid_Hunter: what is "practically zero"
[23:33:02] <Triffid_Hunter> the tooth profile is a semicircle rather than a trapezoid
[23:33:02] <justanotheruser> like 0.1mm?
[23:33:10] <Triffid_Hunter> justanotheruser: less, we could notice that much
[23:33:48] <justanotheruser> Cool, I'll look into them, thanks
[23:34:17] <Triffid_Hunter> justanotheruser: pretty sure cots inkjet printers use them for the print head for the same reason
[23:34:27] <justanotheruser> that is good to hear
[23:37:23] <Triffid_Hunter> justanotheruser: only problem for you is getting custom lengths of closed loop.. for 3d printers we can use open belt and buy it by the linear metre
[23:38:49] <Triffid_Hunter> justanotheruser: although if you're not gearing the belt down at the effector you could probably also use open and just position the join where it won't interfere with anything
[23:39:01] <Triffid_Hunter> that does mean the belt takes the full tension of whatever torque you're asking of the arm though
[23:40:31] <justanotheruser> Triffid_Hunter: the shaft will only rotate 180deg, I will be fine with open loop
[23:49:08] <jak_o_shadows> What is your robot arm actually going to do?
[23:51:13] <z64555> high five people, presumably. :D
{kind=link}
{kind=link}
{kind=link}