Back
[00:09:53] <Anniepoo> m, you say in yout first robot video that RPI3 doesn't allow root? I didn't get why that's a concern on the bot
[05:35:06] <pokmo> hi
[05:35:32] <pokmo> i'm trying to find some plates for building a mechanical assembly. does anyone know of a cheaper alternative to Tamiya's Universal Plates
http://www.tamiya.com/english/products/70098universal_plate/index.htm ?
[05:37:34] <deshipu> Meccano?
[05:37:40] <deshipu> LEGO?
[05:40:12] <pokmo> deshipu, they cost even more don't they
[05:40:50] <deshipu> no idea how much the thing you linked costs, so hard to say
[05:41:02] <deshipu> but you can get some cheap LEGO clones nowaday
[05:41:09] <deshipu> they also use ABS plastic
[05:42:30] <deshipu> personally, I like to use foamed PVC sheets for constructions
[05:42:37] <pokmo> deshipu, but they don't have medium sized plates with holes - right?
[05:42:46] <pokmo> more like just blocks
[05:43:21] <deshipu> holes are not hard to make
[05:43:32] <deshipu> also, lego technic usually has holes
[05:43:45] <pokmo> yeah, i know
[05:43:54] <pokmo> but i can't seem to find technic clones
[05:43:55] <pokmo> or fakes
[05:45:06] <deshipu> pokmo:
https://www.aliexpress.com/item/Arpa-Mechanical-Building-Blocks-Children-s-Science-Educational-Toys/32679855191.html
[05:46:09] <pokmo> deshipu, thanks for the find
[05:46:22] <pokmo> maybe i'll just get some nylon plastic plates and drill into them
[05:47:01] <deshipu> https://summertoys.aliexpress.com/store/group/Technic/1702338_508240398.html
[05:47:27] <pokmo> oww $0.1 a piece
[05:48:10] <deshipu> lots of this stuff there
[05:48:24] <pokmo> thanks for the pointers
[10:05:48] <z64555> zlog
[17:34:20] <mbrumlow> I have both of them on line now
http://pluto.brumtopia.com:8080/ <- intel edison,
http://pluto.brumtopia.com:8081/ <- rpi3
[17:34:28] <mbrumlow> eg, you can see each other
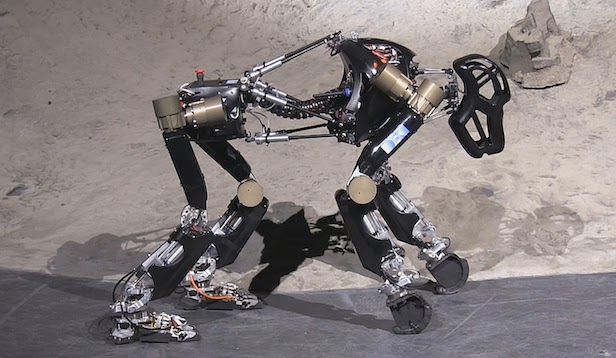
[17:40:51] <SpeedEvil> http://i.imgur.com/LTQiu.jpg How many axes does this have?
[17:41:12] <SpeedEvil> 'all of them' may actually be an acceptable answer
[17:41:58] <SpeedEvil> I think I'm counting conservatively 36
[18:12:08] <robotustra> I think it has about 24 DOF if not to take into account DOF of instruments themself
[18:12:37] <robotustra> 4x6
[18:13:55] <robotustra> there is no reason to increase the number of each arm, because you need to have as less as possible of backlashes
[18:14:12] <robotustra> the number of DOF of each arm
[18:14:36] <robotustra> so, 6 DOF - is the max reasonable value
[18:18:28] <Jak_o_Shadows> sup robotustra
[18:19:46] <robotustra> 6 DOF = 3 translational + 3 rotational
[18:20:21] <robotustra> and you can position a solid object in space
[18:21:24] <Jak_o_Shadows> You get a more complex workspace with more DOF though.
[18:21:29] <Jak_o_Shadows> Which may be something you want, for some things
[18:22:10] <robotustra> yeah
[18:22:31] <robotustra> usually you can get more DOF like for Canada Arm
[18:22:49] <robotustra> but it meets special needs
[18:23:16] <robotustra> like to fit into space sheep
[18:25:53] <Jak_o_Shadows> Hmm. The good thing about the joystick I'm making is that it will have enough DOF to control the robot that is in the planning
[18:26:09] <robotustra> https://raw.githubusercontent.com/Jeast85/Canadarm/master/Canadarm.png
[18:26:51] <robotustra> what robot?
[18:27:03] <robotustra> pic please
[18:27:36] <Jak_o_Shadows> Oh dear. It's still very early concept
[18:27:37] <Jak_o_Shadows> hang on
[18:29:37] <Jak_o_Shadows> http://pasteall.org/pic/show.php?id=109356
[18:30:23] <robotustra> oh, like robo dog from Boston Dynamics?
[18:30:34] <Jak_o_Shadows> 6 DOF in the centre bit, and the legs are simple 2 DOF with the ankle being spring driven
[18:30:45] <Jak_o_Shadows> Kinda, but I have 6DOF in the torso
[18:31:11] <robotustra> ok, the leg can't go aside?
[18:31:40] <Jak_o_Shadows> Hmm. Yeah, the legs must remain parallel in this version
[18:31:51] <Jak_o_Shadows> The back legs can be at a different angle to the front.
[18:31:57] <Jak_o_Shadows> Hmm. Maybe I should make that a passive joint
[18:32:55] <robotustra> you can make you front pair of legs rotating with the cube
[18:33:02] <robotustra> or both
[18:33:25] <Jak_o_Shadows> The centre bit does allow the front legs to rotate wrt the back legs.
[18:33:35] <Jak_o_Shadows> But the front legs would remain parallel with each other
[18:36:54] <robotustra> why?
[18:37:20] <Jak_o_Shadows> Why have I designed it like that? Because I hadn't thought of the pairs of legs being able to move the other way
[18:37:22] <robotustra> do you want to reduce the number of DOF
[18:38:21] <Jak_o_Shadows> Hmm. Well, maybe. I'm not convinced of the need to have DOF being actively driven.
[18:38:36] <Jak_o_Shadows> It could just be splayed outwards a little, and have a spring keeping it in
[18:39:45] <robotustra> I usually do not draw a preliminary version of robot in CAD
[18:40:10] <Jak_o_Shadows> I was hoping to roughly simulate the joints in blender there
[18:40:42] <robotustra> my preliminary version of robot
http://i.imgur.com/EWVKsHv.jpg
[18:41:20] <Jak_o_Shadows> Mine is going to be a bunch smaller.
[18:41:30] <Jak_o_Shadows> Medium-large cat size
[18:41:58] <robotustra> and my one of the latest designs of the same robot
http://i.imgur.com/xZEKXIT.png
[18:42:21] <robotustra> mine will be about 5' tall
[18:42:28] <robotustra> adult size
[18:42:29] <Jak_o_Shadows> I always loved the eyes you have
[18:42:39] <Jak_o_Shadows> Why not a stewart platfor in the chest?
[18:43:50] <Jak_o_Shadows> You have 3 actuators really cose together
[18:44:03] <Jak_o_Shadows> https://www.spaceanswers.com/wp-content/uploads/2014/05/robot_ape-1381479083410-616x448.jpg https://www.spaceanswers.com/wp-content/uploads/2014/05/o-ROBOT-APE-facebook.jpg
[18:45:15] <robotustra> I'll remake bottom part and legs
[18:45:28] <robotustra> no motors in joints
[18:45:40] <robotustra> I'll do human like construction
[18:45:52] <robotustra> pull-pull muscle system
[18:46:06] <robotustra> 2 muscles for 1 DOF
[18:47:01] <robotustra> I decided to get rid of reductors in joints
[18:47:37] <Jak_o_Shadows> You need the extra strength cause it's 5' tall?
[18:48:44] <robotustra> no, it'll be quite light, not more than 20 kg above the base
[18:49:01] <robotustra> base itself is about 25 kg now
[18:50:49] <Jak_o_Shadows> That's good, it won't tip over :D
[18:52:04] <robotustra> the frame is very lightweight if not to use harmonic drives or similar stuff
[19:21:31] <robotustra> http://hackerboards.com/hyq-quadruped-robot-runs-real-time-linux/
[19:25:42] <robotustra> http://files.linuxgizmos.com/cheetahcub.jpg
[19:27:02] <Jak_o_Shadows1> That is one of the images in my "inspiratin" folder
[19:27:46] <robotustra> so, why do you want different design?
[19:28:07] <Jak_o_Shadows1> I mainly want to put the stewart platform in the torso for the 6 DOF there.
[19:28:08] <robotustra> are you doing a robot for flat surface?
[19:28:12] <Jak_o_Shadows1> The legs I intend to copy much closer
[19:28:44] <Jak_o_Shadows1> pretty much flat yeah
[19:28:58] <robotustra> no ladders?
[19:29:12] <Jak_o_Shadows1> nope.
[19:29:20] <Jak_o_Shadows1> It would be nice if it could jump a little though
[19:30:50] <robotustra> what motors you'll use?
[19:51:44] <z64555> those feet tho
[21:09:33] <robotustra> leg design
http://robotconsumer.com/goat-robot-leg-demonstrates-explosive-jumping/
[21:26:29] <Jak_o_Shadows1> Probably some type of servo motors
[21:26:31] <Jak_o_Shadows1> dunno what
[22:31:12] <justanotheruser> def get_tomorrows_date(): time.sleep(60*60*24); return get_current_date()
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}