Back
[00:00:09] <rue_shop3> so maybe about 3.4572633e-17 parsecs?
[00:00:47] <rue_shop3> 1.0668e+09 nm?
[00:01:18] <rue_shop3> 1.0668e+10 angstroms?
[00:01:48] <justanotheruser> sure
[00:02:08] <rue_shop3> that'll help
[00:02:49] <justanotheruser> a chain?
[00:02:50] <justanotheruser> oh boy
[00:04:26] <rue_shop3> whats your shoulder torque?
[00:05:14] <rue_shop3> 725kg-cm?
[00:05:41] <justanotheruser> like 80lb-ft
[00:05:44] <rue_shop3> 5.2570715e-17 slug-lightyears?
[00:05:49] <justanotheruser> yes
[00:06:11] <rue_shop3> 8.0107756e-17 slug-lightyears....
[00:06:22] <justanotheruser> yes
[00:06:53] <rue_shop3> 1106 kg-cm
[00:07:01] <justanotheruser> sure
[00:07:02] <rue_shop3> on a 20mm shaft...
[00:07:02] <justanotheruser> why not
[00:07:16] <justanotheruser> its rated for it
[00:07:29] <rue_shop3> 110kg @10cm lever
[00:07:52] <rue_shop3> did they say anything about the twist in the shaft at that torque?
[00:07:59] <rue_shop3> a shaft is a spring ya know?
[00:08:15] <justanotheruser> I suppose it could be modeled that way
[00:08:18] <rue_shop3> justanotheruser, ... did I just drive you insane?
[00:08:26] <bkboggy> In inverse kinematics, if I wish to solve using iterative method (Newton-Raphson method, to be specific, which uses the Jacobian matrix), how do we select the staring guess value? It's possible that if the guess value is outside the range, one may never get a solution.
[00:08:30] <justanotheruser> rue_shop3: maybe
[00:08:38] <justanotheruser> rue_shop3: I only know what they list
[00:08:42] <justanotheruser> https://www.aliexpress.com/item/Nema34-Planetary-Reduction-Ratio-1-16-planet-gearbox-86mm-motor-speed-reducer-high-accuracy-type-6/32763245555.html
[00:08:51] <justanotheruser> I can ask him anything thouugh
[00:09:06] <rue_shop3> 20mm shaft would be fine for just torque, +- spring...
[00:09:16] <justanotheruser> huh
[00:10:49] <rue_shop3> could prolly adapt with a car axle
[00:11:20] <rue_shop3> have the bearings on the axle, its got the wheel hub on end that you can attach normal material to without them failing
[00:11:22] <justanotheruser> I think you are trying to make me insane
[00:12:38] <rue_shop3> ?uoy ot taht ekil gnihtemos od ot yrt d'I kniht yllaer tnod uoy
[00:12:44] <justanotheruser> wut
[00:15:53] <rue_shop3> .emit fo etsaw taerg a si sdrawkcab txet gnidaer
[00:15:58] <justanotheruser> wut
[00:16:19] <rue_shop3> .yb dnats ,tuo ti erugif lliw eh
[00:18:44] <justanotheruser> wut
[00:19:50] <rue_shop3> naq vs lbh trg obeerq bs gung, gurer vf nyjnlf ebg13
[00:19:57] <justanotheruser> no
[00:20:13] <justanotheruser> nts eoral uc., ue unt aes aa
[00:20:47] <rue_shop3> agf rbeny hp., hr hag nrf nn ?
[00:20:57] <justanotheruser> upe, ueoa eou oalsntueo stheonusnteoahusnthutsnhuuusnteoahusnteoahuseoa
[00:22:36] <rue_shop3> I konw jiibsbreh wehn I see it
[00:26:05] <rue_shop3> justanotheruser, so, do you have the gearbox?
[00:26:08] <rue_shop3> its new new?
[00:29:11] <justanotheruser> no, yes
[00:30:13] <rue_shop3> do a 3:1 with a sprocket off the shoulder, the torque reduction on a large shaft will stiffen everything up nice and go easy on the materials
[00:32:23] <justanotheruser> what do you mean
[00:32:39] <justanotheruser> 3:1 with a sprocket
[00:32:49] <justanotheruser> I'll read in the morning, thanks for year help!
[00:36:10] <rue_shop3> I like how aliexpress cant get around to taking down event banners
[00:36:55] <rue_shop3> I more like getting a email about a really exciting discount card that will get me a while $2 if I spend $50!
[00:37:06] <rue_shop3> whole
[00:37:18] <rue_shop3> off
[00:37:22] <rue_shop3> damned keybaord
[00:37:37] <rue_shop3> I more like getting a email about a really exciting discount card that will get me a whole $2 off if I spend $50!
[00:39:00] <rue_shop3> I also like how prices go up just before an event
[00:39:23] <rue_shop3> so that during the event, you can get them for the same price you could have if there'd not been a sale comming up
[00:40:46] <rue_shop3> if they all knew how much we pay for thigns over here, all their prices would go up 30%
[00:41:02] <rue_shop3> and it'll still be cheaper
[04:36:24] <rue_bed> I suppose a side effect of living 10000 years would be finding out that the people you know all died of old age while you were working on your project
[04:37:24] <robopal> but would you care?
[04:38:23] <SpeedEvil> you can also work less per day, and keep up with them
[04:44:32] <robopal> retire
[04:52:45] <rue_bed> I'm not talking about work projects, I'm talking about personal projects
[04:53:41] <robopal> like, make a kid?
[04:59:58] <SpeedEvil> yeah - you don't do that.
[11:39:43] <Anniepoo> I'm thinking about making an animatronic snail.
[11:40:07] <Anniepoo> wondering about the mechanism to use
[11:43:06] <z64555> wheel, belt, or snake
[11:43:40] <Anniepoo> yes, snake gives me the right appearance for the edges
[11:44:22] <Anniepoo> but I'm wondering if it's better to 'fake' that, use a low power leg method to move just the foam puppet edges
[11:44:41] <robopal> how do real snails move?
[11:45:21] <Anniepoo> like a worm, they raise a portion of their foot, move it forward, drop it, do the next section
[11:46:23] <robopal> make a turtle then
[11:46:33] <robopal> snail would be boring to watch :P
[11:46:45] <z64555> ah
[11:46:54] <Anniepoo> well, he's got a head that sticks out.
[11:47:08] <Anniepoo> snail gives me lots of room for machinery inside
[11:47:34] <z64555> Anniepoo: Could perhaps use a belt/chain that operates a train of cranks
[11:47:44] <z64555> the cranks would be attached to a foot segment
[11:47:49] <Anniepoo> he's to interact with children. So they might sit on him.
[11:48:02] * robopal just googled "robot snail"
[11:48:09] <Anniepoo> yes, figured some sort of crank mechanism.
[11:48:16] <robopal> XD
[11:49:51] <Anniepoo> because we don't have a stereotype of 'snail personality' beyond that they move slow,
[11:50:01] <Anniepoo> I can project whatever personality he needs
[11:50:05] <z64555> alternatively could use wheels that are eccentric
[11:50:21] <Anniepoo> ooh, that's a GREAT idea
[11:50:29] <robopal> bad news
[11:50:41] <z64555> would be simpler to do, and easier to transmit the force to the feet
[11:50:48] <robopal> I wonder if there is ANYTHING they haven't done yet
[11:50:51] <robopal> Anniepoo,
http://www.pleasantmorningbuzz.com/mit-scientists-create-robot-snail-1214051
[11:50:53] <Anniepoo> I agree
[11:52:41] <robopal> for every bloody video there are a million kiddies out there that cry their eyes out, "I for once, was trying to be ORIGINAL in something..."
[11:52:45] <Anniepoo> I think z's got it with the wheels
[11:53:23] <z64555> :D
[11:54:02] <Anniepoo> then have some 'normal' drive mechanism in the center
[11:54:28] <robopal> https://www.youtube.com/watch?v=2Xz508gC2dc
[11:54:32] <robopal> I like that.
[11:55:10] <Anniepoo> yes, that's a good mechanism
[11:55:59] <robopal> http://new4.fjcdn.com/pictures/Snail_1a8480_716265.jpg
[11:56:29] <robopal> anyhow, good luck
[11:58:11] <z64555> ah, that one's a ratchet mechanism
[11:59:26] <Anniepoo> lol
[12:01:32] <Anniepoo> the bottom side of the head is a foot
[12:02:04] <z64555> yeah
[12:02:17] <z64555> The one in the video had a wheel
[12:02:41] <z64555> which stopped turning after going backwards a bit
[12:02:53] <z64555> hence the deduction of it having a ratchet
[12:03:45] <Anniepoo> well, real snails do have an amazing mechanism. The head reaches out, attaches to the ground, and then ripples the body along
[12:04:34] <Anniepoo> you can see the ratchet between the front wheels
[12:05:24] <z64555> The eccentric wheel train has the advantage of being able to go backwards :D
[12:05:56] <z64555> and also has a cooler sounding name
[12:07:32] <Anniepoo> ok, another possibility - a bunch of eccentric disks on a central shaft, offset in phase
[12:07:52] <Anniepoo> that gives up and down
[12:09:11] <Anniepoo> skew the disk to make the 'foot' section go back on bottom of stroke and forward on top
[12:10:33] <Anniepoo> but for appearance, I think z's thing is good - one wheel per section
[12:11:07] <Anniepoo> maybe the wheel's not eccentric, but has a finger mounted eccentrically that slips inside a hole in the foam
[12:11:17] <Anniepoo> (probably some bushing so the foam doesn't wear)
[13:21:51] <rue_shop3> 1.5mm holding tabs in alum are too much
[13:22:07] * rue_shop3 tries to beat the part out of the metal
[13:23:09] <z64555> y u no use chisel
[13:39:37] <rue_house> dremel and rock!
[13:39:51] <rue_house> and steel club!
[13:59:04] <Anniepoo> real snails can get inside their shells
[14:01:22] <Anniepoo> 8cD snails poo out a hole in their forehead - I think I'll omit that
[14:06:01] <z64555> still more sanitary than an amoeba
[14:06:25] <z64555> single port I/O
[14:16:52] <Anniepoo> z, do you need machining?
[14:16:58] * Anniepoo has a machine shop
[14:17:16] <Tom_L> what country?
[14:23:19] <Anniepoo> USA, Oregon
[14:27:13] <Anniepoo> where are you?
[14:31:53] <Tom_L> ks
[14:33:06] <Anniepoo> =8cO Yikes! I escaped there years ago!
[14:45:59] <Anniepoo> you need something machined?
[14:55:25] <z64555> Nothing at the moment, no. But thanks for offering. :)
[14:57:55] <justanotheruser> rue_shop3
[14:58:02] <justanotheruser> I remember you trolling me, what was the conclusion last night tho
[14:59:42] <rue_shop3> :) your doomed
[15:04:32] <justanotheruser> you're*
[15:04:43] <justanotheruser> you sure I'm doomed?
[15:22:12] * z64555 looks at the ceiling sconce
[15:22:27] <z64555> Ok, lightbulb finally decided to go out
[15:22:35] <z64555> had a nice "BRRZT"
[19:45:55] <justanotheruser> yo
[19:53:49] <robotustra> yoyo
[19:55:44] <justanotheruser> I have a motor that is rated for 100 lb-feet. I wish to have 80 lb-feet of torque. I am thinking of attaching an axle to a motor, mounting the axle with two mounted ball bearings, then somehowe mount the load to the axle
[19:56:03] <justanotheruser> apparently clamps are the best way to mount the load (which will be carried by t-slotted aluminium)
[19:57:50] <robotustra> what for?
[19:58:41] <justanotheruser> roboarm
[19:59:40] <robotustra> do you have design?
[20:00:14] <justanotheruser> I am designing the design
[20:00:30] <robotustra> any draft?
[20:00:38] <justanotheruser> I had one but it got scrapped
[20:01:05] <robotustra> any pic?
[20:01:08] <justanotheruser> ?
[20:01:13] <justanotheruser> I am just trying to desgin it
[20:01:18] <justanotheruser> I don't have anythin gexcept the motors
[20:01:38] <robotustra> so draw something and we can discuss :)
[20:01:56] <robotustra> becayse now you idea is not evident
[20:02:22] <justanotheruser> this is what I just described
http://imgur.com/a/WmEjF
[20:03:22] <robotustra> so simple?
[20:03:26] <justanotheruser> ?
[20:03:59] <robotustra> just to lift a load?
[20:04:06] <justanotheruser> up and down sure
[20:04:10] <justanotheruser> that is the shoulder of the arm
[20:04:38] <justanotheruser> Is a clamp really the best way to mount to the axle?
[20:05:14] <robotustra> so you want to make direct drive for shoulder?
[20:06:01] <justanotheruser> yes, a pitch drive
[20:06:21] <justanotheruser> direct pitch drive
[20:06:45] <robotustra> any reductor?
[20:07:06] <robotustra> what is the precision of positioning?
[20:07:25] <justanotheruser> Ideally a few mm
[20:07:34] <justanotheruser> I am using a planetary gearbox
[20:08:48] <robotustra> few mm at what radius?
[20:08:56] <justanotheruser> 3ft
[20:09:36] <robotustra> :)
[20:09:40] <justanotheruser> ?
[20:09:44] <robotustra> 3mm 3ft
[20:09:53] <justanotheruser> meh
[20:09:56] <justanotheruser> it doesn't have to be perfect
[20:10:05] <justanotheruser> I have a stepper servo
[20:10:20] <robotustra> 3mm it's a lot at 90 cm
[20:10:33] <justanotheruser> oh
[20:10:50] <justanotheruser> then I suppose it's a variable I don't have to worry about :p
[20:10:59] <justanotheruser> I have a 2deg-step stepper servo
[20:11:06] <justanotheruser> geared down 16x
[20:11:32] <robotustra> 180 steps per turn?
[20:11:48] <justanotheruser> yes
[20:12:17] <justanotheruser> 10ft circufrence, 180*16 steps to get around
[20:12:37] <justanotheruser> 1mm granularity
[20:15:50] <robotustra> granularity will be different at different Radius
[20:16:04] <justanotheruser> well yes, but at 3ft it is 1mm
[20:16:27] <robotustra> how you'll fight lashbacks?
[20:16:42] <justanotheruser> no clue...
[20:17:02] <robotustra> storng hits
[20:17:03] <robotustra> ?
[20:17:11] <justanotheruser> ?
[20:17:46] <justanotheruser> backlash of the gearbox is 6-8 arcmin
[20:17:47] <robotustra> if you hit your arm you can break thooth of your gearbox
[20:18:19] <justanotheruser> robotustra: you sure? It is rated for 100 lb-ft of torque
[20:18:41] <justanotheruser> I'm a big guy, but I don't think I could unintentionally create that torque
[20:20:20] <robotustra> steady tork is one thing and the hit is another
[20:20:31] <robotustra> but may be it's ok with your reductor
[20:20:38] <justanotheruser> tork?
[20:20:45] <robotustra> torque
[20:20:48] <justanotheruser> rated for 1mm of backlash, with 1mm steps
[20:21:00] <justanotheruser> here is my gearbox
[20:21:03] <justanotheruser> https://www.aliexpress.com/item/Nema34-Planetary-Reduction-Ratio-1-16-planet-gearbox-86mm-motor-speed-reducer-high-accuracy-type-6/32763245555.html
[20:21:06] <justanotheruser> https://www.aliexpress.com/item/2-phase-NEMA-34-8N-m-1133ozf-in-Closed-loop-Stepper-servo-motor-driver-kit-JMC/32712461983.html
[20:21:09] <justanotheruser> motor
[20:21:17] <justanotheruser> any advice for mounting the axle to the load?
[20:21:41] <justanotheruser> I'm willing to completely dump the axle if you have a better way than mounting a t-slotted extrusion to an axle
[20:21:46] <justanotheruser> maybe theres a keyed axle
[20:21:57] <robotustra> what is the final robot size and weight will be?
[20:22:13] <robotustra> and what is the power you'll need to feed it?
[20:22:14] <justanotheruser> the arm or the whole thing?
[20:22:21] <robotustra> whole thing
[20:23:35] <justanotheruser> the arm will be on a rail
[20:23:56] <justanotheruser> the shoulder will be 80V x 6A
[20:23:59] <robotustra> so, you robot is the arm only?
[20:24:03] <justanotheruser> basically
[20:24:07] <robotustra> ok
[20:24:13] <justanotheruser> the rail is much easier I think
[20:24:27] <robotustra> I thought it would be more complex
[20:24:29] <justanotheruser> the elbow will be less
[20:24:38] <justanotheruser> the fingers will be less than that
[20:24:47] <robotustra> and what for you'll use your arm?
[20:24:52] <justanotheruser> so maybe 2x 80V x 6A
[20:25:02] <robotustra> 1 kW
[20:25:06] <robotustra> ok
[20:25:19] <justanotheruser> actually with the rail probably 3x
[20:25:28] <robotustra> 1.5 kW
[20:25:55] <justanotheruser> mhm
[20:26:07] <justanotheruser> haven't bought the motor but I can't imagine more than 1.5kW
[20:26:55] <robotustra> but what are you boulding this robot for?
[20:27:13] <justanotheruser> I'm trying to make an arm that can do what a human arm can do in a confined space
[20:27:36] <justanotheruser> well, without the same freedoms
[20:27:47] <justanotheruser> to access any point in this space, the shoulder and elbow will control the yaw
[20:27:53] <robotustra> how many DOF do you want?
[20:28:29] <robotustra> it will turn nuts?
[20:28:41] <justanotheruser> basically in a 3d polar coordinate space, the arm will control the z and r dimensions and the rail will control the theta
[20:29:12] <justanotheruser> so I only need to have 2 degrees of freedom in the arm, one in the rail, and then the hand will be able to maneuver
[20:29:51] <robotustra> yeah, I got it, but what you'll use it for finally?
[20:30:01] <justanotheruser> just manipulating matter in this space!
[20:30:09] <robotustra> what job you robot will do??
[20:30:16] <robotustra> it's too general
[20:30:24] <justanotheruser> yes, a general purpose arm!
[20:30:47] <robotustra> have you ever saw the general purpose arm?
[20:31:06] <justanotheruser> wut
[20:31:26] <robotustra> http://i.imgur.com/Rkbuxti.jpg
[20:31:49] <justanotheruser> I don't want it be too fancy
[20:31:56] <justanotheruser> just enough to manipulate stuff in a 3d space
[20:32:17] <justanotheruser> maybe build something, stack something, etc
[20:32:21] <robotustra> for 3D space you need at least 6DOF
[20:32:45] <justanotheruser> robotustra: only if you want to rotate stuff
[20:32:50] <robotustra> 3 for motion and 3 for turning
[20:32:57] <robotustra> yep
[20:33:11] <justanotheruser> though I haven't a plan for the hand yet, I think it will be able to rotate stuff in 2 dimensions
[20:33:17] <robotustra> so you will du the parallel translation
[20:33:27] <justanotheruser> what
[20:33:34] <robotustra> do
[20:34:01] <robotustra> your robot will do translation + rotation in 2D
[20:34:10] <justanotheruser> yes
[20:34:19] <justanotheruser> which I guess is just 1 dog
[20:34:23] <justanotheruser> dof* extra
[20:39:26] <robotustra> ok
[20:39:41] <robotustra> is it your fist robot?
[20:41:10] <robotustra> first
[20:42:07] <justanotheruser> yes
[20:43:00] <robotustra> will you build it in aluminum?
[20:44:18] <justanotheruser> the t-slotted framing will be
[20:44:51] <robotustra> you mean aluminum extrusion?
[20:47:34] <robotustra> ok
[20:48:08] <robotustra> for first robot it's a good choise
[20:54:58] <justanotheruser> yes
[20:57:34] <justanotheruser> https://www.youtube.com/watch?v=2VKHB9RbEkk&spfreload=10
[20:59:47] <robotustra> I don't know for whom such videos are created?
[21:00:01] <robotustra> by dummies for dummies?
[21:00:43] <justanotheruser> idk
[21:00:54] <justanotheruser> what do you think of the method for mounting the arm to the axle?
[21:01:04] <justanotheruser> or in general moving the arm with the motor
[21:01:35] <robotustra> as for me I would not do like this
[21:01:48] <robotustra> I would use a timing belt
[21:02:24] <robotustra> it will reduce the noise and save from hits
[21:13:41] <justanotheruser> hmm
[21:13:53] <justanotheruser> ok that is possible
[21:14:08] <justanotheruser> but what about actually moving the arm?
[21:14:22] <justanotheruser> geared axle
[21:14:31] <robotustra> pulley
[21:14:39] <justanotheruser> pulley?
[21:14:44] <justanotheruser> I have to rotate the arm
[21:15:09] <robotustra> http://www.designatronics.com/images/center-distance.jpg
[21:15:30] <justanotheruser> yes
[21:15:34] <justanotheruser> but I need to actually rotate the arm
[21:16:35] <justanotheruser> presumable one side of the pulley is the motor and one side is the axle
[21:16:36] <robotustra> first draw the kinematics of your arm like this
https://www.google.ca/search?q=pulley&espv=2&biw=1920&bih=938&source=lnms&tbm=isch&sa=X&ved=0ahUKEwjno7PKt8rQAhWL6oMKHbweA7IQ_AUIBigB#tbm=isch&q=robot+arm+kinematics
[21:16:42] <justanotheruser> but how to I transfer from axle to arm
[21:16:42] <robotustra> yes
[21:17:00] <robotustra> make a joint
[21:17:30] <justanotheruser> yes, with an axle
[21:17:42] <justanotheruser> how do I transfer the energy from the axle to the arm!?
[21:18:13] <justanotheruser> I wish there was a geared t-slotted connector
[21:22:06] <orlock> There can be!
[21:22:13] <orlock> checked thingiverse?
[21:23:23] <robotustra> he wants a tonns of torque on this joint
[21:23:34] <robotustra> so plastic will fail
[21:24:35] <justanotheruser> I will 3d print it with metal
[21:24:57] <robotustra> do you have such printer?
[21:25:00] <justanotheruser> no
[21:25:02] <justanotheruser> I will have to build one
[21:25:05] <justanotheruser> I am joking btw
[21:25:12] <justanotheruser> hmm
[21:25:27] <justanotheruser> I may need to weld it from the axle to the t-slotted framing
[21:26:25] <robotustra> it's the best joint
[21:26:34] <justanotheruser> best joint?
[21:26:42] <robotustra> join
[21:26:46] <robotustra> connection
[21:26:48] <justanotheruser> what is?
[21:26:54] <robotustra> welding
[21:27:43] <robotustra> weld a washer and bolt t-slot frame
[21:28:13] <justanotheruser> you're saying the best way to connect the framing to the
[21:28:21] <justanotheruser> axle is welding
[21:28:46] <robotustra> yes
[21:29:00] <robotustra> if you don't want to disassemble it
[21:29:27] <justanotheruser> you want me to weld the bolt to the axle?
[21:29:29] <justanotheruser> o_o
[21:29:54] <robotustra> not a bolt, but a washer
[21:30:07] <justanotheruser> hmm, maybe
[21:31:19] <robotustra> something like this
http://www.ebay.com/sch/i.html?_odkw=washer+shaft&_osacat=0&_from=R40&_trksid=p2045573.m570.l1313.TR12.TRC2.A0.H0.Xflange.TRS0&_nkw=flange&_sacat=0
[21:31:21] <justanotheruser> maybe I can fit framing around the axle then mount the t-slotted framing to fit-around framing
[21:31:43] <justanotheruser> a flange may work
[21:31:57] <robotustra> weld the flange to the axis and bolt your profile to it
[21:32:35] <justanotheruser> yes, I can do 4 flanges, 2 flanges attached to each t-slotted extrusion then the t-slotted extrusions can join
[21:32:41] <justanotheruser> how much torque do you think that can handle
[21:33:00] <justanotheruser> robotustra: is there an alternative to welding I can do at home? I need to travel so far to weld
[21:33:17] <robotustra> I think it can keep like 1000 kg per inch
[21:33:54] <justanotheruser> kg per inch? o_o
[21:33:59] <justanotheruser> kg-inches you mean?
[21:34:10] <orlock> Either way somebody needs to die
[21:34:17] <orlock> for mixing metric and imperial like that
[21:34:42] <robotustra> :)
[21:34:55] <robotustra> imperial system must die
[21:34:59] <robotustra> soon
[21:35:08] <robotustra> I hope so
[21:35:59] <robotustra> orlock: justanotheruser also measure backlash in mm per foot
[21:36:35] <justanotheruser> I measured it in mm
[21:36:43] <justanotheruser> mm per arm
[21:36:53] <justanotheruser> anyways, you are measuring torque right
[21:36:56] * orlock twitches
[21:36:58] <Snert__> furlongs per fortnight.
[21:37:06] <justanotheruser> and saying it can do 2000kg-cm
[21:38:07] <robotustra> welding - yes
[21:38:26] <robotustra> so you should not care much
[21:38:39] <justanotheruser> care about whether it will slip?
[21:38:49] <justanotheruser> :p.
[21:39:17] <robotustra> I would make a dowel
[21:39:34] <justanotheruser> huh
[21:39:42] <justanotheruser> make a dowel forwhat
[21:40:05] <robotustra> to fix flange on the axis
[21:40:26] <robotustra> http://www.ebay.com/itm/Lot-of-3-New-4-Butt-Weld-Pipe-Flanges-8-Bolt-/132003164488?hash=item1ebc007148:g:eakAAOSw9mFWJkhG
[21:40:52] <justanotheruser> I thought I just put the flange around the axle..
[21:41:14] <robotustra> I would use flange like this and fix it with a bolt coming throug the axile
[21:41:38] <robotustra> you can't just put it, you have to fix it good
[21:42:05] <justanotheruser> yes, weld it on
[21:42:10] <justanotheruser> but where does the flange come in?
[21:42:50] <robotustra> I didn't got your question
[21:43:17] <robotustra> you want me to invent a design for your robot arm?
[21:44:47] <robotustra> anyway, have to go sleep, tomorow will build a robot at work
[21:49:21] <robotustra> there is no reason to discuss particular joints if you don't have your design yet
[21:49:39] <robotustra> 1) make a design
[21:49:58] <robotustra> 2) estimate the range of forces
[21:50:28] <robotustra> 3) decide whether you are going to disassemble it or not
[21:50:49] <robotustra> 4) choose the type of part connections
[21:59:11] <justanotheruser> robotustra: Is this what you're describing?
http://imgur.com/a/HScxw
[21:59:28] <justanotheruser> or at least consistent with what you're describing
[22:00:18] <robotustra> yes
[22:00:47] <justanotheruser> where does the dowel come in then
[22:01:25] <robotustra> dowel or key is to fix flange on the axile
[22:01:32] <robotustra> axle
[22:01:47] <robotustra> if you don't have welder
[22:02:02] <robotustra> but if you have - forget about dowel
[22:02:11] <justanotheruser> will a dowel have sufficient torque?
[22:02:33] <justanotheruser> may be a dumb question, but Is there a way to weld in my bedroom safely?
[22:02:42] <justanotheruser> I can weld, but the equipment is miles away
[22:03:22] <robotustra> dowel might have, but it could be also backlashes
[22:03:48] <robotustra> I think you can weld if you have 2 car batteries
[22:04:21] <justanotheruser> I'm not concerned with power, just the fact that I need a tank of stuff
[22:04:30] <justanotheruser> is there like, a super high heat soldering iron? lol
[22:04:58] <robotustra> https://www.youtube.com/watch?v=PV5oLPLUzrM
[22:05:38] <robotustra> if you don't have a tank of stuff - how are you going to build a robot?
[22:05:44] <justanotheruser> lol looks super ghetto
[22:05:53] <justanotheruser> tank?
[22:06:07] <justanotheruser> I have tools, but I need to go to tho hackerspace to get to a welder
[22:06:42] <robotustra> make your own bedroom hackerspace first!
[22:06:47] <justanotheruser> lol
[22:06:49] <justanotheruser> thats what I want
[22:06:55] <justanotheruser> I want to not have to use a welder though
[22:06:59] <robotustra> I actually did
[22:07:04] <justanotheruser> what is the best small scale alternative
[22:07:33] <robotustra> for your torque - I think not so much possibilities
[22:07:51] <justanotheruser> ok I will go to weld it then
[22:08:11] <justanotheruser> or ask some mofos in china to do it for me
[22:08:43] <robotustra> if you can make slots - then you can avoid welding
[22:09:07] <justanotheruser> slots?
[22:09:12] <robotustra> but I don't think you have a milling cachine
[22:10:09] <robotustra> data:image/jpeg;base64,/9j/4AAQSkZJRgABAQAAAQABAAD/2wCEAAkGBxAQEBAPEBAQEA8PDw8QDw8PDw8PDw8PFREWFhURFRYYHSggGBolGxUVITEhJSkrLi4uFx8zRDUtNygtLisBCgoKDg0OFxAQFS0dHR0tLSstLSstLS0rLS0rKy0tKy0rKy0tLS0tKy0tLTctKy0tLS0rLS0tLS0tLTctLS03K//AABEIALcBEwMBIgACEQEDEQH/xAAbAAABBQEBAAAAAAAAAAAAAAACAAEDBAUGB//EAD8QAAICAQIEBAMFBwIDCQAAAAECAAMRBCEFEjFBE1FhcSIygQYUQpGhIzNScrHB0SSCYmPwFRYlQ1OTsuHx/8QAGAEBAQEBAQAAAAAAAAAAA
[22:10:15] <robotustra> AAAAAECAwT/xAAdEQEBAQEBAQADAQAAAAAAAAAAAREhAjEDEkET/9oADAMBAAIRAxEAPwDlFEkAiVZIqwBCyRVjqskVYQyrJFWOqyQCAwEMCICEBBDcscLCjwaHEQh4jYhDRRwI/LAYRwI4WPiA2IWIgIYEAMR8Qo+IEcbEkIjYgBiLEPERECMiDiSEQYARiIeJmcT4zVQME8z9lXc/WBdc4GTMLifH60ytfxv6dBMXiHFbr85PJX/CP7ykijt+feTVxJqtRZac2Mf5R0EBUJ2A2lmjRM2NjvNReHhACxGfKTVZmm0JaXhp0QeZkxs7DYQUozvJWpAG49ukUuDSRSaYvhYaiJRDAnRk6iGBEBCAhKcCEBEBHEBxCEYCFAaOIgIWIQosRwIQEBgIQEICG
[22:10:19] <justanotheruser> wut
[22:10:21] <robotustra> FgAFj8skAjgQIuWMRJsRFYEEcQykblgKNiFiLEACIxhyO+1UBZ2CqOpJwIDSpr9dVSvNYwHkO59hMLin2qzlNOM/wDMP9hOfdWc89jF2PmZLVkaXEftFbblaQa06c34j/iZIqwcnLN5neWUrJ2H5TQ0nCWbBwZNakxlLUW7TU0vCjjmOwmrVpUrHT4vXoJHc7E9cj06SaoTYqDC9fMSuQWOdzmWa9EWPcf2loBK+oBMysipRox8x2EmttUbKID3Z27SnfqVX1hrExtPnFMl9cc9Y8uGuqAhgRxCAnRyICEBFHEBxHij4gPHEUICEIQgsQWSBYQIWGFhBYUBgIYEQhCAsRR4oDYj4j4jgQA5YuWHiLECPlgsMbnbEz+MfaCjTZBPPZ2rTc/XynFcU43qN
[22:10:24] <justanotheruser> pls
[22:10:27] <robotustra> VsTyV9q1yB9T3gx0XF/tTVVlKv2tnp8i+57zlNZqbtQea1iR2UbKPYQaqAO2Ze0ukLEZ6eQmbW5FSqrsBiXdNoHY9CZuaLgX43PKv8AWXX1S1jkqUb5HMdzMrOqWk4ciDms/IdTJH1OfhUcq+neP4ZbrmW9Nw38TnAhcUTpmbYAj36yzVplRd/ylm7Uqmyj6nqZnXXZ3J/xI1CtuxkLtKVtgG5kWp1gGcTLv1JPeUtxPq9b2HSZt1pJ6xWPn0ldmlxi05MUiLR5U16OBCjRxNIUcCOBHAgOIQEQEMCAwEMLHENRCEFhgRAQgIQgIhHiAgOBCjAR4DxwIgIWIDASvxDXV0IbLDgdAO7HyAlh2ABJIAG5JOABOQ+0ivqbFZCPAQABieXnYnLcgO7HECT/A
[22:10:30] <justanotheruser> lol
[22:10:33] <robotustra> L4/F+6AX1Y5x9JebWvqVyhIQ7ctTAM23d/wj23nMU6IKyLfW1aNbzPawPItY6qMbnYfnNXRVgLbdp3SiiixRz2jNl+QcZXoANgcdOYHPXEbxUu4ZXz8oU33HpVUrCqvf8R+Zj6kiDqeCNUB4jIth3FK/G4Hm2NlH1nXaC0aul00bV13IxNtQUAuN8umPmPlmZemVE3KszMSOZxm2xh15V/qTsJmtYzuHcDdzkjA6kkdptrp6aRhRzNtvLD22uOqpzEKqrt9FP4j6yTS8KwcvnmB3UnvmZXFCxnfrnH6STTcOLAEjb1m14KLu5/2jt6Slrtaeg6eQhQt4dQxjJAmbqdUzHrI9Rf3JmVqdd5fnKLWp1AHfeZWr1me8rW6gmU7Hlxm0VlsgLQGeRM0rNo2s
[22:10:39] <robotustra> kROYQXMPkC9dz5CVNQ8sUl5zFKj0UQ1EQWSBYUwEMCOBCEBBYXLHEeAwENRGAhgQh4YEYCGohCxHxHxHgNiICEJX1OtRCF3aw/LUm7n19B6nAgWAJSv4iAStYDsvzHPLWn8z9M+gyZRutttJU7gbGqtiEU+Vlg3P8q/kYdVa5FYXx7ExipFC00jzOfhX3bfyEzrX6oGV7jzMQ6jfmcEUJ6qn4/c/wD1J9AiEllHikDe925KlHfDY3Hoox6jrJdTWijOocWt+GlcmrPoMZsPvtKmptd8eIfDTHw1Lva3vjZfpDWIdb4LEr4Y1NpGMsDyVjyVSTyD6k+8zU0jc/gMUWndv2bFkQ4yS4PzdhnJ6TUSon4EXH/LTGcedj9B/WVtYlWDUB94tYH4K8imvbds/
[22:10:45] <robotustra> iI/iO3tIsJqbqrW1mmHh+DX4hd/gHKuwUAfPlQM5xkzpdci6/SHiel8Om3H/iKurMVVRvanXbbcAb5zseaZH2ZrXUFOHPdXl22Z1Z6gV3FLEEc/xYOAQMgbnpNK24cG4lXVTa+pJqX75X4YSupD0rAyQMKObHkcZ+KWfCoOGaflXx3LVVFf397BLrwfLP7qs+Q3PnNGjiCOjPV8g6OQVRt8YTPzdukrfafgSLqfvQZtTTqB42me9y1FCHGawM/EQTsOmCOu8xbOKh7OWstfYNv2YDYA2GSMKAPLO0zY1Glq9X1JO0yNTrRv+hMp6/XMGKkgkeRBAPcZ7zNt1HNEham1eqYyi7kd4L2fnKtls0xaJ3ld7InbMSVE9BmGdR9ZIlXc7CaNfDGUczjA9ZRuf
[22:10:51] <robotustra> Jmk0xcDZR9e8aqrMZVl/SVwhLpNoppqu0UDqVWGFjrCAhowELEcCFiAOI+IWIQEAVWSBYgIYEJSAhCIQgIQsRrGCgsxwBuTMviPGUS1dOHrSxmqVntOErDk/GfMAAk9unnI6kyn3lLc0szqNXb89rISGFSkYRcjyOfIdZGpNRtxyu7mVLlqw1ShdvHu8Q4HJn4V3wDncZHTrJm0KUkrcxVi2Pu9ZZ77G3B536sf09SJm6/7HrqVSytBpEVGAe1io1H8PwHcb5HOfPviVeDcat0dd4tTxTcawuqYc11HLlWRm3JUjyPUeu1k1fjpPCITFzfdqFwRShUWN5czdEHoN+u4kL6o8hSlRTRv8RGCf9vVj6n8u8bU1BOVmYWuUW0Wsc0orDIK9s489/eKuot8b
[22:10:57] <robotustra> sEX/wBa7b/26+p9CfoJlpBWoHxA4LbB2y9znH4FG+P0HnHv5KfitZlYgYqrPNqLPV2HyD0H5xrbcKz0/sq+lmruOXb0XuT6D9Ja0XCQi/eLn+50Hc6rUjOquJ6imrqufPc+8KzbuezFbK1St8mkoXNzg9cjsOm7YHpJdTpaNMoGqOCcFOH6Zi1rnt49nX6flnpJn4l8BTQ1nSac559ddl9Vf7H/AB+koJpkqU2FvBQ55tRbvqbc9eUfhz+fvCB1OquuevnUULVn7vpNMqixdwfiJHw9BnP5CW7tdp9TQ1ty2WWlnL1+I3PbechW2wSxAxvnGPKZ9V11wNekrNNbfPqH/fP7Z6e/9JW1LponRUIdmDG2xgHIbGMZPTqYG39nbhq9E/CtUd62F+nHMQylT
[22:11:02] <justanotheruser> plssss
[22:11:03] <robotustra> vX7bkY8mHlMvX8VrqUabSqBnZiinnPbAA3+pkCi5bE1rIKa0HwHlCm3zHKBtsep7D0l/X8SqoP+mqDai/Lhghc4JOWHnvnbpAwdZp3qC+KAjNuK8g2Bf4mA+X2MoWXS3xLS21jn1DBbbPiFRbnuYH8TAfIPff0mWcmGbRNZIwuZLTQWOFBJPYTqeE/Zno923cJ3+ssTWFw3hNlx+Ebd2PSdhw3gldAzjmf+I9vaaNdaoAqgADsBAus2mkc59oLNjOVWdDx585mAkiCAmlo1map3mto+kCxFCigdWIYjCEBDRxHxEBCEBCEBHAhAQEBCEWIQEBAQgIgIQEuI8t4wVuvtsOfidsb9ANh+gE0fsvxEUX0PazPTQzstechchjsNwMuR2lLitJrvtQ/hsbHtn
[22:11:09] <robotustra> I/QiVUYggj/AK9JnFleg6bWjVodRqHdl8Vq0oHQ4VTknvs39doAr8dsCteRVKtjlFaJ5O3Q48hk+0w+E6lzWtanKNcMVnp4jAAqfQ8qzoNell1xp5XADlatHplBsYA98bKPU/kJJcuumcZ9dDae4Vry30sCNMzdKmAJAyTjGBsTvjvtNDQcJt1Lcygahh89rkpoqPPLfjx5CatXBqcLotdbQl1ykJpkYvZUvLzKz2ZPxAjI28+sytQupvD6Gyx7aNA/gtRpV5PHUHFd9hGwDY6k9c9wZuzexJziR+I002Y0yrxHWrt47gDR6bHesDbbbv8AXtM22p9RYbbnOsv3zY+V0tHfCjGG9hge8WttqoRUsCgdU0dGSznsbCPm9/1kf3TUapR42KNMPlor+EcoH
[22:11:15] <robotustra> 4m/tMKFuJAMRT/qr8cpsYYoq/l7Dt0/SAOGqD4+tt533wCPhHoqxXcRp04FWnQPYenIOvsP7mRjhLWA3a2wIvXw+bA9mP8AYfpCBv4rbqCatImE/FZnCqOmS39hKuqop0lbu7C7VFSED5wrHYEKOmM5yfKW019lxNHD6uVF2NxHKif4P5k+kFk02jYFidXrWzgY5+Vj35Tnl9zvAz9Do9RqaXNmpCVJg2V2Xc9zgEZ5aye3XfylzS8TatSukAsbatLHwOQD8R8x6e3WczzV89g1BY2FmJKcpXxCcknudz2k2kvYKwUsuTj4N2IOMqPfErJ9fWAzF7Tdexy7D5QfUncn8gP0k3DuEWWn+Fe5OwljR6VU3sAUdkByfdj5y5ZxMAYGAB0A6RK1/n6zWvoNJ
[22:11:21] <robotustra> TQPhALd2PX6TQXUgziLuLkHrLOm4pnvN45b11NuoEp36mZNmuzITqCZjRW4vZnMyFMva5sygsocHea+hO0xx1mvoO0C7FCxGgdbCEYQwIaPEI4jgQCEICMBDlCAhiNCEBwIUEQpRxP240XLatwG1i8rfzr/AJGPynNZnpvG9B49D1/ixzIfJx0/x9Z5olAZvDbbmblOdiD0/rMsrHDtUK3BbJQ7OB1K+Y9R1necH1usRb69PeqC5ELXE8zrUMkPX36bf7u081Nb1O1NgIdCccylSVz5TV0urJTkJJNY+DO/wd1+hOfrJeOnm/yuw02g+7/ty3gAEs+q1HxX2E9cKemc/XPeU7uLBCNXQ4X4LabTYjEW0O5BZkH8Jw46dM+9jT8GN1a6rV6hLqq0TlUXI
[22:11:27] <robotustra> 4pBHwBlBzze4z+Uz+J8YrtIqpqytQPM4XJCdCGI2A36S+blW/FptNptCBZYee2xVs5iQz2KwyGLdgdun6yiRq9ecj9hp87HBA6/gXqx9T+kh4NVpFqa3U2ln0z+GtNm4RNyhRc/Hn4vQY36iW1t1fENqV+76XobW2LL5DHX2GB7yWdIBtXpdF+yoU36ljykjLMx75I/oPqY/wD2Y7j7xxO3wqx8tAbBx5HHQ+g3j1anTaMmrRJ951hB57TgisdMl+ij0HtmZutdVfn1jnU6k7rQvyIewC9h6kduneQXNTxOy5OTSoNJpAP3xAVnUd1Hb3/XtMVNUiZSjl6Hn1FvQ4yev4z5DpmTFdRrX5Mc2P8AyUOKavI2v5+nWdRwz7L01jNwFzkYwVxUg8kX+53lk
[22:11:33] <robotustra> 1nXnScxJw5KnJYFcZJ6y5Tmsc3TOcfWd3fwHSp8S0qD23YgfQnE5jjdG8nqXHX8En7bWS97HqZCzxmzBwZPEdvze9+IbTJtJmGmlJl/TaXE6308N+jRdpItcnVAI5EwM3WLM4TQ4g0yw0CTvNfQmY3NNLQWSjWiiUxoHYARM2I8jsWWtBa+FXdmVmrMlprM5y3W8mLyGSCR1iSCdGBRxEI8oUIRhHEB5xH2z4VyP46D4LDh8fhs8/r/AFncCQ6rTrajVuMqwwR/13ko8012sNyqXGbk6WHcsMcu/rgD+spqcHI6y9xbhzae01tuOqN2ZfOUSJEbH2f0tF9jLfqk0ycufjYp4u/yBug+uJuX8WrT/RcO0/iuwKkhcp5Ek99vxHA95xSMgdPF5zVzDxBWV
[22:11:39] <robotustra> FhTO/LzbZx5zta+PVCsU8I07oGwH1GoC5Qn+LBPM/5+xkx0lYGhs01GtYcQrdggcEL8Z8cbqGBOHBO257gzV1/ENRqlJsYaPRAfu8hbLF/hY/hHp+h6zn9Qba9YHFq3XLyuXfdSx2KMNwPL0yOhl3T6PUa2zORaVOCxyulpPkP429Bn1lvWZzgLOJBUFelTwKSf3pBNlh/4F6k+p39uk0uDfZV3+O7mpQ7lc51Nvq7fgHoN/adFwjgFWnPOf2t2MG1wMj0ReiD239TNQxiWq+m0qVIK60VEHRVGB7+p9YbNE7StdbKgdS+05rilWZr33TM1BzBLjnrNLvHq0c1TVHFYkW+rVWrTYkvJiT4kbwyiMCw4EMyrq7MCZGXxCyUA0l1DZMhVTJa1IkBl7Qg5l
[22:11:45] <robotustra> eqqX9Cm8m9azjWrQ4EUu1U7CKbZdII/LGEITQYViGqiIQxGB4UEQhKHEKDCgKODGigFmMTBzFIKnFuHJqK+RtiN0YdVbz9vSee8S0FlD8li4PYjdWHmDPTpFqNMli8tiK6+TDP/AOSDyTWHYe/9ptf9o6i2uus2VhSOQLpVHjWf8HKvynz2E6rU/ZPTOMKGr/lbP/yzNDhfB6NMP2aDmIw1hALt9ew9BiMGLwz7IVYR7Q3yDmo2wGzn4mBOT7TqKq1RQqqFVRhVUAADyAEXNBayUGzSF7ZFZfKV2ohE118oX3yG7USq9kiDstldmjEwYDxRsxiYDkyNoRMBzAjMzde00XMzNVvIMsLkyVK5arogXDEY1BLgS5w1MtM+sZnQ8G0/SZk61fjbqq+ERS0i7
[22:11:51] <robotustra> CKdcZWRDEBYcAhDEBYQgGI8EQoDwoEeARMEmImNJQhCgiEIgeKKImAQMZmgF5DZbAOyyVLr5HdfM+/URqJrtRKdlsia3MjJkQTNAJjExswFGJjGCTAcmCWjEwYBZj4zGVcy3TRmBSsr2mfZXvOjt020ydRXgxixUdMCZ953mlqG2mawyZK1EmjTJnXcKqwBOf4bp8mdZo68CXzCrIijgRTSJUMkEeKA4hCNFAIQhFFAeKKKAoxMUUlDc0MGKKQImRPZFFKK1uolK7UxRSClZfmVnaKKGQiImPFAAmCTFFAEwTFFAaS115iigXaNNNCiiKKWKnekETJ1uliilVhazTmVaNIS0UUzR0fDNJjE2kTEUU1AWIoooH//2Q==
[22:11:57] <robotustra> shit
[22:12:00] <robotustra> sorry
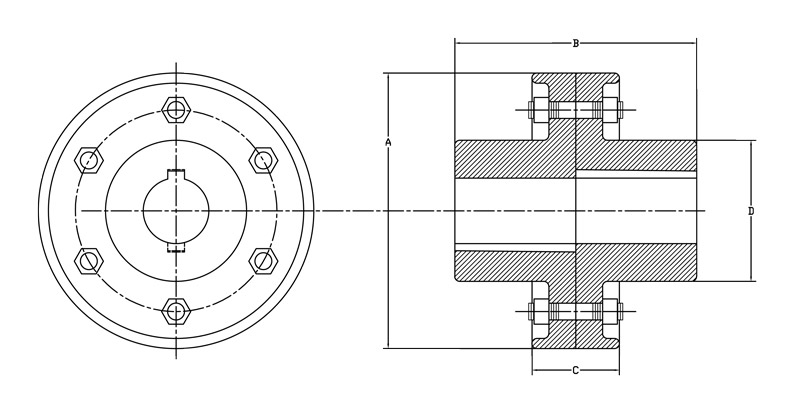
[22:13:19] <robotustra> http://royersford.com/images/couplings-60-07-XXXX.jpg
[22:13:30] <robotustra> something like this
[22:13:55] <robotustra> you have a slot in the axle and in the flange
[22:14:03] <justan0theruser> whoops laptop died
[22:14:19] <justan0theruser> hmm, I think I will weld
[22:14:26] <robotustra> and you put the metal bar
[22:14:31] <robotustra> in this slot
[22:15:02] <robotustra> you can do it if you have a milling machine
[22:15:08] <justan0theruser> I don't :p
[22:15:11] <justan0theruser> I only have basic tools
[22:15:12] <robotustra> if not - just weld
[22:15:13] <justan0theruser> I'll have to go
[22:15:56] <robotustra> or do like this
http://i30.photobucket.com/albums/c319/WayneV42/Shaftcoupling.jpg
[22:16:14] <justan0theruser> photobucket oh my
[22:16:20] <justan0theruser> how are they coupled
[22:16:34] <justan0theruser> oh they have pins
[22:16:39] <justan0theruser> that screw into the axle
[22:16:43] <robotustra> yes
[22:16:51] <justan0theruser> how much torque can that handle
[22:17:09] <robotustra> quite big
[22:17:18] <justan0theruser> what is that called?
[22:18:10] <robotustra> keyway slot?
[22:18:26] <robotustra> dunno
[22:18:43] <robotustra> english is not my native
[22:18:51] <justan0theruser> french is?
[22:19:26] <robotustra> no
[22:20:35] <justan0theruser> you are correct, it is a keyed shaft coupling
[22:23:02] <justan0theruser> seems also pinion flange
[22:24:00] <justan0theruser> that is an alternative to welding I guess
[22:25:51] <justan0theruser> can't seem to find them sold generally anywhere
[22:25:57] <justan0theruser> anyways, I'll probably just weld it
[22:26:04] <justan0theruser> thanks for your help, bbiab
[23:18:56] <justan0theruser> ok
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}