Back
[01:36:55] <rue_shop3> since I started using the welding goggles, I hate all my other safety goggles
[01:37:04] <rue_shop3> esp when wearing ear protection
[01:57:25] <rue_shop3> hmm, snapped the first of the 1.5mm mill bits
[01:57:37] <rue_shop3> trying a second one thats been shortened a little
[03:36:37] <rue_bed> maybe I'll just dial it back down to 10mm/min tommorow
[03:37:04] <rue_bed> 15 is apparently applying stress, unless the bit is cut wrong
[04:02:53] <Celrenheit> Hi everyone!
[04:07:42] <Celrenheit> Is there a normalized name for the following "double bar" system:
http://lsro.epfl.ch/files/content/sites/lsro/files/shared/PRD/components/double_barre.jpg ?
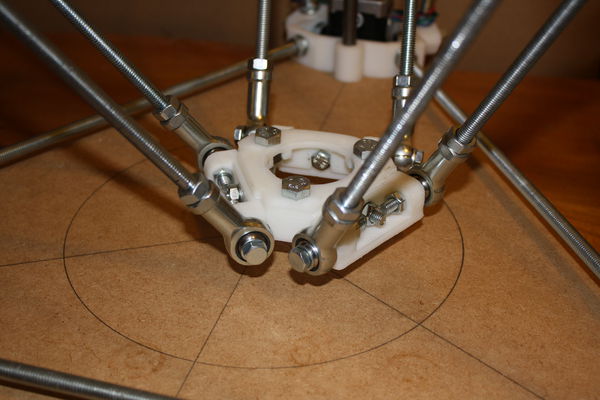
[11:56:03] <rue_house> is that part of a universal?
[11:56:14] <rue_house> no, its part of a tripod
[11:57:55] <rue_house> http://reprap.org/mediawiki/images/thumb/f/f0/HeliumFrogDeltatoolplatform01.jpg/600px-HeliumFrogDeltatoolplatform01.jpg
[11:57:56] <rue_house> that
[11:57:57] <rue_house> yea
[15:20:33] <Celrenheit> rue_house: It's part of many delta robot built
[15:22:14] <Celrenheit> I am wondering if I have to build this part myself or if it is something standard that can bought on some website ?
[15:23:30] <Tom_L> https://www.3dprintersonlinestore.com/rostock-delta-3d-printer-diy-kit
[15:25:37] <Celrenheit> Tom_L: This is not the same system
[15:25:50] <Tom_L> it's a delta
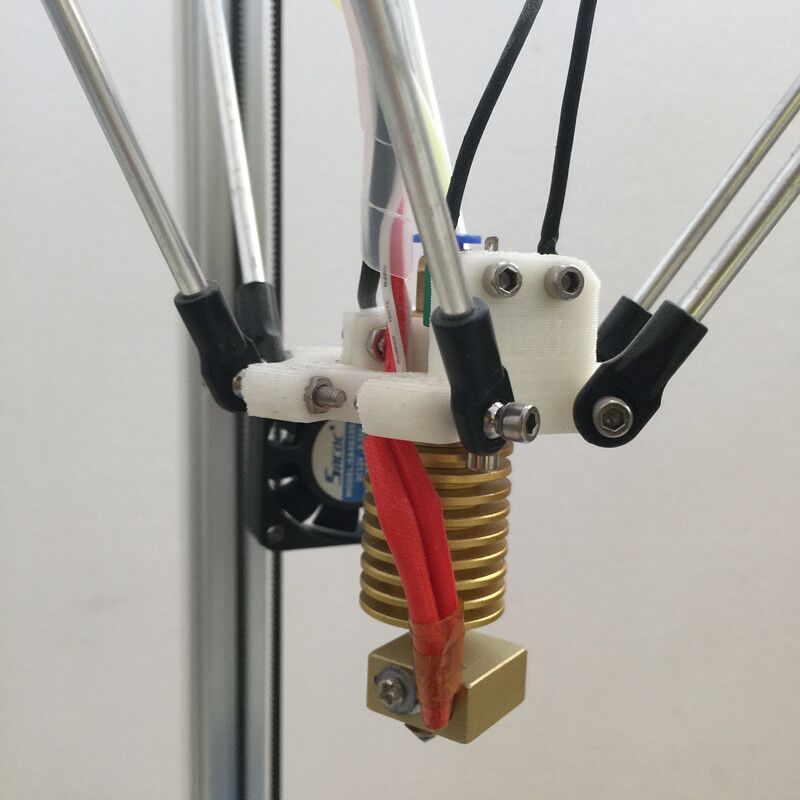
[15:26:18] <Celrenheit> If I've seen it correctly this consists of a rodend bearing
[15:26:33] <Tom_L> heim joint
[15:27:00] <Celrenheit> I'm looking into a two bar system where the end of the bar is half a sphere
[15:27:08] <Celrenheit> connected to a sphere in the end effector
[15:27:20] <Celrenheit> http://lsro.epfl.ch/files/content/sites/lsro/files/shared/PRD/components/double_barre.jpg
[15:27:28] <Tom_L> http://g01.a.alicdn.com/kf/HTB1nUtBLpXXXXXmXpXXq6xXFXXXW/100-open-source-DIY-Reprap-Rostock-Kossel-Delta-3D-Printer-kit-optional-heat-bed.jpg
[15:28:04] <Tom_L> same idea
[15:29:11] <Tom_L> yours have to be held together with a spring
[15:31:04] <Celrenheit> More something like this
http://i.imgur.com/PZG0EzH.jpg
[15:33:24] <Celrenheit> English is my third language that why I'm asking if it has a particular name to be able to search for it
[15:45:33] <robopal> third language?
[15:45:57] <branjb> i love fpga design
[15:46:06] <branjb> >16 critical warnings
[15:46:06] <branjb> >159 warnings
[15:46:06] <branjb> >0 errors
[15:46:06] <branjb> good to go!
[15:46:10] <Celrenheit> robopal: Yes ^^
[15:46:26] <robopal> what is the 1st and 2nd?
[15:46:27] <malcom2073_> branjb: Ship it!
[15:46:44] <Celrenheit> I've just found it, if someone is interested it is: "Associated Ball Joint Male"
[15:46:58] <Celrenheit> French and arabic
[15:47:32] <robopal> ok
[15:48:21] <Celrenheit> By the way thank you last time for the hint about bosch's robot ;)
[15:48:49] <robopal> oh thats nothing
[15:49:22] <robopal> I am greek, english is my 2nd language, and I also know french
[15:49:43] <Celrenheit> Ah great
[15:53:00] <Celrenheit> I've seen multiple deltas choosing this choosing this solution over the other one with rod end bearing
[15:53:15] <Celrenheit> I'm wondering if this can cause a lot of friction inside the sphere
[16:07:01] <malcom2073_> ball joints are used in a lot of RC hobby stuff, so they're super cheap. rod ends typically weigh more, and are more expensive
[16:07:20] <malcom2073_> Probably wouldn't hurt to use some sort of dry lubricant on the sphere
[16:07:49] <Celrenheit> malcom2073_: Alright
[18:00:31] <justan0theruser> oh my
[18:01:32] <doomlord> how feasible is a robot capable of cleaning a bicycle
[18:02:14] <doomlord> it would have to move a brush through all the fiddly areas .. deraileurs etc
[18:02:22] <justan0theruser> doomlord: do you know CV?
[18:02:32] <doomlord> I guess it'll cost more to build than a wet weather bike. but it would be interesting :)
[18:02:40] <doomlord> CV, computer-vision ?
[18:02:48] <justan0theruser> yes
[18:02:52] <doomlord> i think my question relates more to the mechanical side
[18:03:19] <doomlord> I can imagine software/vision approaches
[18:03:54] <justan0theruser> Sounds like a robot arm on the hardware side
[18:04:03] <justan0theruser> with a high degree of precise control
[18:04:05] <doomlord> it could even require precise alignment , and use a pre-recorded path .. but of course if it could actually use a neural net to figure out dirt, and 3d scanning to figure out hte precise shape... great
[18:04:05] <justan0theruser> plus a campera
[18:04:45] <doomlord> I guess it's evidently 'possible' from what we see in industrial robots. I suppose the real question is how much would it cost.
[18:04:55] <doomlord> it doesn't have to do it fast
[18:05:12] <doomlord> and a robot capable of doing that should be able to clean other things
[18:06:33] <doomlord> i think it would have to be 5 axis to reach into all the fiddly spaces around the drivetrain
[18:07:39] <doomlord> i suppose although its likely to be stupidly expensive (for the task of cleaning a bike), such a thing could do so much more.
[18:08:12] <doomlord> i'm just so fucking lazy when it comes to cleaning.
[18:12:38] <doomlord> one thing is not wanting to damage a carbon frame
[18:17:40] <z64555> just house it down with a pressure washer
[18:17:43] <z64555> *hose
[18:19:00] <z64555> doesn't need 3D scanning to figure out the shape, can use a set of range finders and have the arm sweep across the bike
[18:20:07] <z64555> Can alternatively use a camera and perform image processing on it to figure out what's a bike and whats an empty space
[18:29:33] <branjb> opencv was a pretty huge learning curve for me and I can only do the most basic things in it still
[20:21:23] <rue_shop3> hmm
[20:21:30] <rue_shop3> haivng fun with a basic CAM program
[20:21:49] <rue_shop3> I thought I could have each z layer call an xy move set, but that dosn't work
[21:35:45] <justan0theruser> can i get a 2nd opinion on attaching a motor to a load? Is the best way to attach the motor head to an axle then drill a hole through the axle and attach the load through the drilled holes?
[21:37:20] <rue_shop3> too much torque
[21:37:39] <rue_shop3> with your torque, your gonna sheer just about anything,
[21:37:50] <rue_shop3> as I said when you worked out the math
[21:38:03] <rue_shop3> hardened metal
[22:32:33] <justan0theruser> I think you recommended attaching it by clamp
[22:57:25] <rue_shop3> I think my last words were that you need a design that dosn't require turning it on a shaft because, for the amount of torque you were asking for just about anythng normal would fail
[22:59:41] <rue_shop3> a hardened spline,
[23:00:12] <rue_shop3> a keyed clamp-shaft w/hardened metal
[23:00:33] <rue_shop3> or, just weld it
[23:00:50] <rue_shop3> how big did you shaft end up being?
[23:02:35] <justanotheruser> I have a planetary gear
[23:02:44] <justanotheruser> both are rated for the torque I expect
[23:15:00] <rue_shop3> k, not what I was asking..
[23:16:47] <justanotheruser> the torque between the motor and the axle, no?
[23:20:25] <rue_shop3> what is the size of the shaft you are connecting to?
[23:20:27] <rue_shop3> 1"?
[23:28:43] <justanotheruser> https://www.aliexpress.com/item/Nema34-Planetary-Reduction-Ratio-1-16-planet-gearbox-86mm-motor-speed-reducer-high-accuracy-type-6/32763245555.html
[23:42:25] <rue_shop3> "why did you put your cnc machine in a box?" "so I could stack things ontop of it"
[23:45:31] <justanotheruser> huh
[23:46:13] <justanotheruser> shaft looks to be 30mm
[23:46:35] <justanotheruser> sorry, 20mm
[23:48:44] <rue_shop3> hmm
[23:48:58] <rue_shop3> close to the min I'd recommend
[23:49:06] <rue_shop3> do you know what grade steel it is?
[23:49:21] <justanotheruser> no clue, only know the listing
[23:49:23] <justanotheruser> could ask them though
[23:49:41] <justanotheruser> it says the torque it's rated for, in what way might that torque be excessive?
[23:50:18] <rue_shop3> yes, its the way your applying the torque
[23:50:26] <justanotheruser> ?
[23:50:49] <rue_shop3> its not like an auger, where its just torque
[23:51:14] <justanotheruser> can you explain?
[23:51:48] <rue_shop3> how are you at beam force diagrams?
[23:52:18] <justanotheruser> It's been a while
[23:52:28] <justanotheruser> are you implying the torque wouldn't be applied symetrically?
[23:52:37] <rue_shop3> remember how there is yes
[23:52:54] <justanotheruser> hmm
[23:53:00] <rue_shop3> your torque is in a few directions, and its not in any way balanced
[23:53:16] <rue_shop3> hey, more often than not, numbers lie, so you could be fine
[23:53:37] <rue_shop3> my intuition says you have an ugly design problem
[23:54:48] <justanotheruser> wouldn't the mounted bearings help apply the force symmetrically?
[23:54:51] <justanotheruser> torque*
[23:55:04] <rue_shop3> I see issues with too much shaft spring, sheering bolts/pins, bending and snapping.
[23:55:16] <rue_shop3> I could be wrong
[23:55:42] <justanotheruser> how do I fix this problem
[23:55:54] <justanotheruser> I just want to rotate my arm given my two motors
[23:55:58] <justanotheruser> *one motor
[23:56:04] <rue_shop3> apply the force over a larger pin
[23:56:31] <rue_shop3> to reduce the intesity of the torque at the bearing point
[23:56:51] <justanotheruser> isn't mounting an axle to it then fixing the axle to mouned bearings the equivalent of applying the force over a larger pin?
[23:57:33] <rue_shop3> I think about 2" hollow pin, about 3mm thick mild steel, with a sprocket on it of about a 5" dia
[23:57:45] <rue_shop3> and running a chain to the motor
[23:58:29] <rue_shop3> but having the shaft about 2" big, which will significantly reduce the spring along it
[23:58:57] <rue_shop3> and using a reduction chain off that to the drive, to reduce the torques on that
[23:59:27] <rue_shop3> is your arm still 4' long?
[23:59:43] <justanotheruser> I'm thinking a little over 3
{kind=link}
{kind=link}
{kind=link}
{kind=link}