Back
[06:54:56] <SpeedEvil> http://www.ebay.co.uk/itm/10x-Hover-board-Electric-Scooter-Segway-Broken-Faulty-Spare-Repairs-Parts-Lot-/132003173210?hash=item1ebc00935a:g:FREAAOSwKOJYKbj~
[08:59:23] <Enamkcin> /b 6
[09:26:24] <rue_house> haha
[09:26:47] <rue_house> lets see, thast $1000 for 10 broken things
[10:14:41] <SpeedEvil> rue_house: Or $1000 for probably 18 working wheels, 30 working batteries, 30 working drivers, ...
[11:32:09] <SpeedEvil> Also - holy crap is this pile of crap heavy
[11:32:45] <SpeedEvil> More of them are the 8" wheel ones, not the 6.5" wheel ones - which is great
[11:53:47] <robotustra> buy this crap and do electric cars for kids
[11:55:15] <SpeedEvil> meh. Kids can get their own stuff.
[11:55:20] <SpeedEvil> :)
[11:57:36] <robotustra> small kids can't unfortunately
[11:58:43] <z64555> they can if they look cute enough and go on TV or movies
[11:58:54] <z64555> kinda
[11:59:27] <robopal> what are you guys talking about?
[11:59:28] <robotustra> kids do not go to TV by themself
[19:46:32] <Snert_> https://techcrunch.com/2016/11/10/a-robot-can-solve-a-rubiks-cube-in-637-milliseconds/?ncid=rss
[19:46:46] <Snert_> I wonder if those are .9deg/step steppers.
[20:29:13] <malcom2073_> I imagine they're servos
[20:29:27] <malcom2073_> Ah no they do look like steppers
[20:31:47] <orlock> They could be both
[20:33:52] <gmct> Hey, I received a rumba board just now for a robotics project and I noticed that it's missing the headers for the stepper drivers.
[20:34:06] <gmct> I'm faced with a few choices and I was looking for input.
[20:35:31] <gmct> The first choice would be to just use the screw terminals. Second choice would be to contact their customer service tomorrow and see what could be done. The downside to this is that my club meeting is on Thursday so we won't be able to start work then. Third choice is to solder headers from other locations on the board that I don't need headers in.
[20:39:22] <Snert> forego headers and solder wires directly where the headers would be. Just an option is all.
[20:39:46] <gmct> Well if I were to forego headers I would be better off using the screw terminals.
[20:41:30] <gmct> Also, do you know where I should look to figure out the pinning?
[20:41:30] <gmct> Because the documentation I'm finding is for use in a 3d printer and there's stuff about max pin and min pin and stuff while I just need the 4 pins that correspond to the pins on the board.
[20:43:18] <gmct> Back
[20:43:33] <gmct> What did I miss when I was gone?
[20:57:39] <Snert> is the rumba board opensource and have docs?
[20:58:16] <Snert> pinouts and such should be in the docs.
[20:58:56] <orlock> gmct: And you dont have spare headers?
[20:59:06] <orlock> i guess by that its actually sockets, not the pins?
[20:59:22] <gmct> Like basically there's pins that would stick out there but there's just holes.
[20:59:26] <orlock> also there may be a dedicated rumba channel? if not, #reprap maybe
[20:59:45] <orlock> the stepper drivers should have pins, and the rumba board should have sockets
[20:59:58] <orlock> or is it the drivers that are lacking pins?
[21:00:01] <gmct> Well at the moment it has screw terminals.
[21:00:10] <gmct> It's where the stepper drivers would plug in.
[21:00:25] <orlock> screw terminals would be for the HBP/hotend or maybe the stepper motors
[21:00:37] <gmct> Basically you have two options typically. Use the connector attached to the stepper motors or use screw terminals.
[21:00:38] <orlock> I'll brimg up a rumba picture
[21:00:59] <gmct> I would have preferred to use the connectors for easy setup but right now those are missing.
[21:01:17] <gmct> Hmm I'm also unable to write to the board.
[21:01:30] <orlock> Hold on - Motors, or drivers?
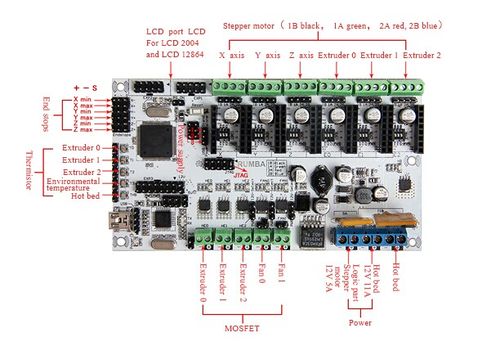
[21:02:13] <orlock> http://reprap.org/mediawiki/images/thumb/1/17/Rumba4.jpg/500px-Rumba4.jpg
[21:02:28] <gmct> Motors
[21:02:56] <orlock> so it has the terminals, but not the 4 pins between the terminal and the driver mount?
[21:03:07] <gmct> Yeah.
[21:03:26] <orlock> yeah just use the screw terminals if you dont have spare 0.1" pins handy
[21:03:33] <gmct> Alright.
[21:03:40] <gmct> Also, I can't write to the board right now.
[21:03:40] <gmct> avrdude: stk500v2_ReceiveMessage(): timeout
[21:03:49] <orlock> if your motors already have 4 pin ends on them, you may want to wait
[21:04:07] <gmct> Yeah, that's my line of thinking.
[21:04:08] <orlock> Selected right com port?
[21:04:25] <gmct> Tried selecting both options that came up.
[21:04:53] <gmct> Neither worked.
[21:05:12] <orlock> Never used a rumba, i thought it was just a ramps + atmega integrated
[21:05:51] <orlock> i can't actually see a rumba listed in the arduino ide as a board type
[21:06:15] <gmct> It's an arduino mega underneath
[21:32:11] <rue_shop3> plastic: whats POM?
[21:34:47] <robotustra> choose arduino mega with atmel 2560
[22:34:23] <z64555> POM's a juice drink featuring pomegranates
[23:14:18] <peeps[lappy]> POM == acetal == delrin
{kind=link}