Back
[00:55:02] <rue_shop3> ok
[00:55:10] <rue_shop3> where was I
[01:52:07] <z64555> yelling at people that try to poke you?
[01:52:12] <z64555> no, you did that already
[01:59:17] <branjb> Cleaned up the wiring on my robot tonight:
http://imgur.com/a/WAg4I
[02:13:57] <robopal> so, where is the 'after' photo?
[02:14:10] <robopal> joking :P
[02:21:51] <branjb> haha, lemme see if i can find a before one
[02:22:34] <branjb> this was before:
http://imgur.com/a/hcRir
[02:24:22] <z64555> where'd you get the nylon braiding?
[02:26:23] <z64555> or rather, braided tubing
[02:26:35] <branjb> amazon, it's called tech flex
[02:26:42] <z64555> ah, neat
[02:26:54] <branjb> not neat
[02:27:03] <branjb> ever since I learned about it I've become OCD on wiring
[02:27:50] <z64555> could be worse
[02:29:18] <branjb> haha
[02:29:55] <z64555> There's an old, time consuming method to bundle wires together, NASA still uses it
[02:30:20] <z64555> it's been largely replaced with zip ties, but uses something similar to fishing line
[02:30:29] <Jak_o_Shadows1> eh, you can buy it in a lot of places
[02:30:30] <robopal> ah good old cable ties
[02:30:33] <Jak_o_Shadows1> I have a whole bunch somewhere
[02:30:42] <z64555> ah, here it is
[02:30:46] <z64555> https://en.wikipedia.org/wiki/Cable_lacing
[02:31:21] <branjb> yeah I used to be in aviation, most planes bundle wire like that
[02:51:41] <Anniepoo_> ah, cable lacing
[02:53:39] <Anniepoo_> glyptal
[02:53:46] <Anniepoo_> phenolic board
[02:53:50] <Anniepoo_> fish paper
[02:54:06] <Anniepoo_> ceramic standoffs
[02:54:11] <Anniepoo_> octal sockets
[02:55:55] <Anniepoo_> 1/4" phone jacks
[02:56:16] <Anniepoo_> equipment built on 3/6" al plate
[02:59:38] <Anniepoo_> dial cord
[03:00:19] <Anniepoo_> building SWR bridges - I made a few of them
[03:00:36] <Anniepoo_> pringles cans full of parts unsoldered from old TV's
[03:00:47] <Anniepoo_> ARRL Handbook
[03:00:55] <Anniepoo_> 6SN7
[03:01:24] <Anniepoo_> 8cD
[03:01:37] <Anniepoo_> Hallicrafters, Heathkit
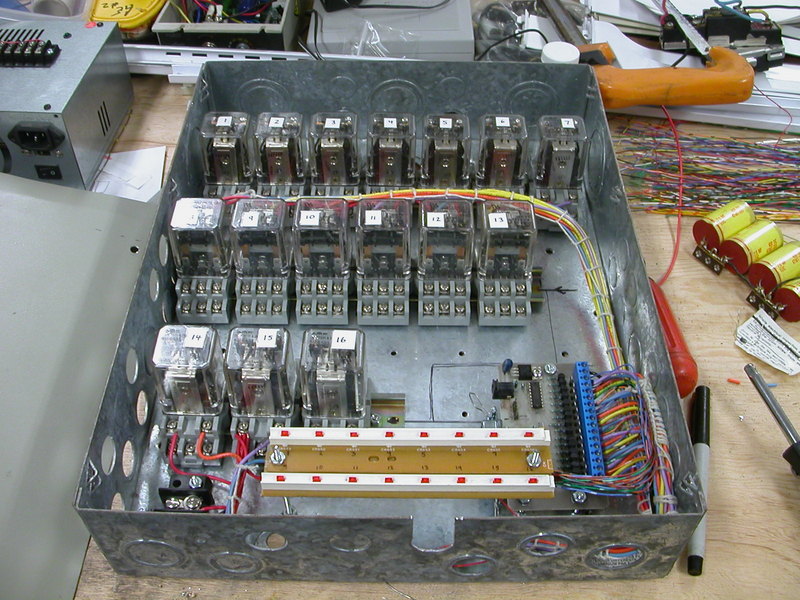
[03:11:59] <rue_bed> http://ruemohr.org/~ircjunk/projects/heatplant/dscn0163_relaybox.jpg
[03:12:16] <rue_bed> didn't get it quite right
[03:12:33] <Jak_o_Shadows1> how so?
[03:12:43] <Jak_o_Shadows1> This is relays for the valves yes?
[03:12:46] <rue_bed> knot direction
[03:12:55] <rue_bed> thats the boiler control relays, yea
[08:19:15] <codepython777> https://www.servocity.com/37mm-clamping-motor-mount - how do i find something like this , with 40mm hole in it? :)
[08:20:05] <theBear> https://www.servocity.com/40mm-clamping-motor-mount
[08:20:13] <theBear> heh nah, sorry, couldn't help myself
[08:20:49] <theBear> mmm, that's alarmingly skinny looking... but mmm 40mm, that's something fairly common, just gotta remember what
[08:21:05] <theBear> not non-chinese scaffold tubing, maybe theatre clamps ? lemme see
[08:21:51] <theBear> hmmm, looks like a lot of em are 50mm, but i got a feeling like i'm about to remember something very relevant
[08:22:21] <theBear> and they are just clamps, depending on the design/style, maybe that would do if it easy/cheap to get
[08:22:59] <codepython777> theBear: I have a motor that i want to mount to a C-channel - but my motor is slightly bigger than the mounting clamps they provide
[08:24:57] <theBear> ooooh, C channel eh ? that's that extrudey aluminium skinny modern bar replacement eh ?
[08:26:00] <theBear> hmm, are the global tri/quad trusses and those ridiculously heavy duty cast steel handcuff-style ones 40mm ?
[08:26:04] <codepython777> theBear:
https://www.servocity.com/13-50-channel
[08:26:29] <Tom_L> about 45 min from me
[08:26:43] <theBear> ooh horrible ! ugly expensive cable hanger channel like jackass industrial electricians use, with extra holes for speed, one assumes
[08:28:21] <theBear> hmmm.... "40mm" eh ? that looks like it more the kinda "40mm" that dressed timber batten is, which would be pfft i dunno, 2" raw before it goes thru the thicknesser/smoother wood munching machine
[08:28:24] <codepython777> theBear: how do i mount my motor to something like that? What is a good cheap replacement for that c-channel?
[08:28:26] <theBear> but that's by the by
[08:28:58] <theBear> how bit is the motor ? i mean, we talking a zero torque discoball synchro with nice bolt mounts, or something more like the first link/pic or ?
[08:29:16] <codepython777> theBear:
http://www.vexrobotics.com/217-3351.html
[08:29:32] <codepython777> 1.59” [40.4 mm] diameter, 2.795” [71 mm] long
[08:29:39] <Tom_L> duct tape & superglue
[08:29:48] <robopal> is that extruded aluminium or they drill all these holes?
[08:29:54] <robopal> holy f..k..
[08:30:10] <codepython777> Tom_L: can that hold 30lbs of weight? :)
[08:30:11] <Tom_L> stamped em out
[08:30:23] <codepython777> Tom_L: I was thinking of using metal wires ;)
[08:31:10] <Tom_L> so vex offers motors with no way to mount them?
[08:31:21] <Tom_L> what sort of robotics place is it anyway?
[08:31:40] <theBear> ooh, now it coming back... methinks 40mm is what the old heavy as eff (cast iron maybe?) likely long ago retired plumbing pipe/bars i used to somehow consistantly salvage and use for lighting were, ooh, and the tiny L angle steel commonly found in warehouse ///// profile roof structures... which explains why i tended to prefer clamps more like
http://www.stagespot.com/the-light-source-mega-swivel.html which is a long forgotten traditional old theatre
[08:31:40] <theBear> style clamp vs the open frame G style or err
http://www.ebay.com/itm/global-truss-side-entry-coupler-clamp-dj-stage-lighting-/121071149611 modern "Global(tm)" style ones
[08:32:40] <theBear> but maybe thgose pictures give yer some ideas at least... i often find that mass production and crazy capitalism these days means something commonly used and made and sold is often much cheaper than any slightly more appropriate alternatives..
[08:34:51] <codepython777> theBear:
http://www.vexrobotics.com/versaframegussetsandmounts.html - seems like one of these might be more appropriate for me, but i'm using the c-channel from someone else, and it seems they both want to not mix and match
[08:36:18] <theBear> if yer looking at the ones labelled global and they ain't making sense, it's cos the truss and all the other bits that are often attached to the clamps use a "egg/cup" mounting approach, basically a angley kinda U with a hole thru it sideways slides into a big chunky allyminimum truss/tube section and gets a little solid coney kinda pin thru a hole in the outer tube, but if you can't find the hardware without the "egg"s attached, they almost always j
[08:36:19] <theBear> botled with a standard metric metalthread countersunk from the inside of the clamp
[08:36:44] <Tom_L> would mount to their gearbox, not necessarily the motors
[08:37:01] <theBear> lol, tghat's just a meccano kit with a fancy name, not even a very interesting one by the looks :)
[08:37:02] <Tom_L> it's a 'buy it all here' shop
[08:37:10] <Tom_L> and we'll take ALL your money
[08:37:16] <theBear> oh, at least there gears further down the picture
[08:37:17] <theBear> s
[08:37:52] <theBear> you know that rue can teach you to do that same kinda stuff alarmingly quickly and easily with random odd printer bits and pieces, one assumes ?
[08:38:07] <Tom_L> he don't wanna hear that
[08:38:32] <theBear> i think like a lotta metal and similar not-soft-material working, it's all about knowing a few little tips and tricks ... makes something that used to seem so impossible and fiddley become trivial
[11:33:35] <codepython777> theBear: Tom_L: Thanks for all the help
[11:50:59] * rue_bed stretches
[11:54:48] <z64555> $10 for a 1-ft aluminum C-channel that's full of holes
[11:54:54] <z64555> holey crap
[11:55:45] <z64555> That's gotta be extruded, with some punch-out rollers
[11:55:56] <z64555> Alternatively, a laser could do it
[12:03:15] <z64555> or maybe not a roller, a hydraulic press
[12:03:43] <z64555> I'd love to see the machine that makes those
[12:04:33] <codepython777> z64555: seems like its been cut
[12:04:44] <codepython777> it looks more study than just alum. not sure how its made
[12:08:16] <z64555> Can you see toolmakes on the insides of the holes?
[12:08:20] <z64555> *toolmarks
[12:12:00] <codepython777> z64555: no marks at all. Very clean.
[12:12:07] <z64555> If it was drilled, there's be circular lines on the inside
[12:12:46] <z64555> If it was punched, there'd be verticle lines. Also the outside would be recessed slightly and the inside would be pushed out or otherwise flat
[12:13:41] <codepython777> could it be injeciton molded?
[12:14:13] <z64555> not likely, you hardly use that process for anything but plastics
[12:14:48] <z64555> another possibility is compressed metal powder
[12:26:02] <codepython777> z64555: it is nice though - am sure it could be cheaper
[12:30:43] <z64555> If it's made out of 6063, the price is very competitive to plain C channels
[12:31:58] <z64555> oh, wait.
[12:32:09] <z64555> was looking at the wrong numbers
[12:34:41] <z64555> http://www.onlinemetals.com/merchant.cfm?pid=7006&step=4&id=297&gclid=CJmCtouoptACFUMcaQodvGEM7w
[12:36:19] <codepython777> z64555: looks similarly priced - except its sturdier
[12:37:26] <codepython777> z64555: if i had a cnc that could make holes in it, i would be set :)
[12:37:44] <Tom_L> print it
[12:37:59] <Tom_L> that would only cost ~30k
[12:38:03] <z64555> just need a drill press, a good clamp, and steady hands
[12:38:45] <z64555> You can also make a CNC out of a 3D printer jig, just swap out the hot extruder for a rotary tool (dremel)
[12:38:58] <Tom_L> barely
[12:39:14] <Tom_L> dremel is not a mill spindle of any sort
[12:39:36] <z64555> The newer dremels have a really really cheap head
[12:39:52] <mumptai> 3d printing works with crap linear motion parts, milling doesn't
[12:40:28] <z64555> precision and materials for such a getup, is of course, limited to soft materials
[12:41:21] <Tom_L> http://tom-itx.no-ip.biz:81/~webpage/cnc/temp/prints/Ti_print2.jpg
[12:41:29] <Tom_L> those were printed out of titanium
[12:41:46] <Tom_L> as one piece btw
[12:42:15] <z64555> titanium powder?
[12:42:20] <Tom_L> yes
[12:42:23] <z64555> ah
[12:51:27] <codepython777> Tom_L: how did you make it?
[12:55:12] <codepython777> Tom_L: is there a way to use a simple mold to convert that powder into a metal cast? :)
[12:58:10] <Tom_L> a 3d printer
[12:58:23] <Tom_L> like i said it cost ~30k
[13:29:07] <justanotheruser> where is robopal!
[13:30:08] <robopal> i am not here
[13:31:11] <justanotheruser> hello
[13:31:29] <justanotheruser> what do you think of this for my robot arm
https://www.aliexpress.com/item/2-phase-NEMA-34-8N-m-1133ozf-in-Closed-loop-Stepper-servo-motor-driver-kit-JMC/32712461983.html?scm=1007.13339.33317.0&pvid=b37e82ab-e271-49f8-86d3-da13123a390f&tpp=1
[13:31:31] <justanotheruser> https://www.aliexpress.com/item/Nema34-Planetary-Reduction-Ratio-1-16-planet-gearbox-86mm-motor-speed-reducer-high-accuracy-type-6/32763245555.html?ws_ab_test=searchweb0_0,searchweb201602_2,searchweb201603_1&btsid=1c51c289-082e-45fe-9943-6d0efe2ebd56
[13:32:52] <deshipu> privacy error
[13:33:11] <justanotheruser> deshipu: can't load the page?
[13:33:41] <justanotheruser> product 1 title: "Nema34 Planetary Reduction Ratio 1:16 planet gearbox 86mm motor speed reducer, high accuracy type 6~8 arcmin" product 2 title "2 phase NEMA 34 8N.m 1133ozf.in Closed loop Stepper servo motor driver kit JMC 86J18118EC-1000+2HSS86H"
[13:34:18] <deshipu> how are you planning to drive it?
[13:34:37] <justanotheruser> deshipu: 2HSS86H is the driver
[14:00:02] <mrdata> drive it with steam!
https://www.youtube.com/watch?v=iGh18DMHIsg
[14:10:24] <justanotheruser> hmm, I think I'll buy this and try it out
[14:10:34] <justanotheruser> worst case I pay for a $350 lesson :p
[15:33:01] <Martiini> is there any linux software to learn cnc, robotics, industrial machine programming ?
[15:33:10] <rue_shop3> yaya I got to use my milling machine today!
[15:33:31] <rue_shop3> I only killed 1 bit
[15:34:36] <robopal> Martiini, no...
[15:37:36] <robopal> Martiini, do you just mean if there is software for control of cnc for example?
[15:39:09] <Martiini> .. no idea .. as I understand, most cnc use g-code and run windows dos .. maybe .. I'd have to read just some lessons webpage maybe
[15:39:17] <robopal> ah no
[15:39:34] <Martiini> .. industrial robots run windows ce, I think
[15:39:35] <robopal> just google.. first result: linuxcnc
[15:39:39] <robopal> .org
[15:40:14] <Martiini> .. I know, some CAD software can output g-code .. etc ..
[15:40:57] <Martiini> .. I have no idea .. some machinery programming .. etc
[15:42:02] <justanotheruser> 8Nm stepper servo + 16:1 gearbox for robot arm
[15:42:30] <justanotheruser> https://www.aliexpress.com/item/2-phase-NEMA-34-8N-m-1133ozf-in-Closed-loop-Stepper-servo-motor-driver-kit-JMC/32712461983.html https://www.aliexpress.com/item/Nema34-Planetary-Reduction-Ratio-1-16-planet-gearbox-86mm-motor-speed-reducer-high-accuracy-type-6/32763245555.html
[15:45:10] <justanotheruser> what happens if I have more torque than a gearbox is rated for?
[15:45:18] <justanotheruser> does it slip?
[15:45:21] <justanotheruser> or break
[15:45:58] <Martiini> :) if you apply more torque than specified for gearbox :)
[15:46:17] <justanotheruser> it might stop functioning?
[15:46:30] <justanotheruser> Can most servos measure the torque on them?
[15:47:09] <Martiini> motors can spin slower/faster
[15:47:16] <Martiini> no idea
[15:47:27] <justanotheruser> a motor won't break under too much torque though right? It will just stop turning?
[15:47:56] <rue_shop3> depends
[15:48:06] <Martiini> yes, electric motor either drives the load or stops
[15:48:09] <rue_shop3> if you push too much current while its stalled the magic smoke will come out
[15:48:14] <rue_shop3> you have to play and learn
[15:48:26] <rue_shop3> NONE of us can just hand you the answer you are going to need
[15:48:47] <rue_shop3> you need to gain experience, which is a set of lessons custom encoded in your brain
[15:49:09] <veverak> try, experience, repeat
[15:49:12] <rue_shop3> we cant encode them for ya, get a motor, get a cheap one, work with it, learn, apply what you have learned to things you do
[15:49:18] <justanotheruser> hmm
[15:49:36] <justanotheruser> my concern is that the motor is rated for a higher torque than the gearbox :p
[15:49:55] <rue_shop3> justanotheruser, you have been here for like 2 weeks, in that time, how many motors have you hooked up and tested?
[15:50:11] <justanotheruser> rue_shop3: 0
[15:50:16] <rue_shop3> right
[15:50:18] <Tom_L> go forth and test
[15:50:20] <justanotheruser> why would I buy a bunch of motors I wouldn't use?
[15:50:28] <rue_shop3> if it were 10, you would prolly know a lot more than you do now
[15:50:33] <Tom_L> you wouldn't buy any
[15:50:38] <justanotheruser> I'd also be $5k in the hole
[15:50:40] <rue_shop3> get cheap ones, there are tonnes out there for free
[15:50:41] <Tom_L> hack old junk hardware
[15:50:59] <rue_shop3> justanotheruser, your method is not teaching you anything usefull
[15:50:59] <Tom_L> you just gotta look
[15:51:01] <Tom_L> and ask
[15:51:20] <rue_shop3> I been here for over 15 years, if you were gonna get anywhere you would do it regardless of anything
[15:51:24] <justanotheruser> I own no junk
[15:51:32] <rue_shop3> the people who get things done aren't the people who try to get it right the first time,
[15:51:34] <Tom_L> rue n i know it all twixt the twain of us =)
[15:51:37] <rue_shop3> they are people who just do it
[15:51:43] <rue_shop3> and learn to do it right later
[15:51:51] <Martiini> how about used washing machine motors? obviously, dedicated servo motors are better
[15:51:59] <rue_shop3> anything, learn
[15:52:07] <rue_shop3> get something and find a way to make it work
[15:52:13] <Tom_L> use what you have available to you
[15:52:23] <rue_shop3> we see SO many university graduates who know nothing and think they do
[15:52:26] <justanotheruser> ok, I'll drop $400 on this motor gearbox combo and either get it working or learn somethnig
[15:52:29] <rue_shop3> build complete disatsers
[15:52:32] <Tom_L> but don't tell me you don't have anything available because then i know you aren't looking
[15:52:38] <rue_shop3> justanotheruser, not what I'm saying
[15:52:54] <rue_shop3> you dont have to pour money into it
[15:53:01] <Tom_L> i could send you a boxfull of stuff
[15:53:04] <Tom_L> but i won't
[15:53:04] <justanotheruser> gearboxes aren't cheap
[15:53:08] <rue_shop3> none of the robots I build need more than $20 put into them
[15:53:09] <Tom_L> because you won't use it
[15:53:13] <rue_shop3> justanotheruser, they are free
[15:53:19] <rue_shop3> you just need to know what to get them from
[15:53:19] <justanotheruser> where
[15:53:27] <rue_shop3> justanotheruser, how many of these things are you building?
[15:53:31] <Martiini> motors are really expensive, and so are all cnc machines - plasma cutters, etc
[15:53:40] <rue_shop3> yea I made a cnc for $100
[15:53:43] <justanotheruser> rue_shop3: 2
[15:53:52] <rue_shop3> right
[15:54:09] <rue_shop3> so, if there will only ever be two of these in the world, why do you have to use brand new parts?
[15:54:26] <Martiini> professional plasma cutters made in switzerland cost 200 000 - 500 000 euro/dollar
[15:54:32] <rue_shop3> brand new parts are for things that will be produced in volumes of 100-millions
[15:54:38] <justanotheruser> because I cannot find old parts that fit my criteria
[15:54:54] <rue_shop3> how many have you looked at
[15:55:03] <justanotheruser> I'd guess around 50
[15:55:21] <rue_shop3> I need a 7/16 collet for my mill, and I dont ahve any stock quite large enough :/
[15:55:25] <justanotheruser> well observed closely
[15:55:38] <justanotheruser> maybe 500 a glossed over seeing they obviosuly didn't fit
[15:55:41] <justanotheruser> *I
[15:55:54] <rue_shop3> dont tell me the details fo the gearbox or drive you want
[15:55:57] <rue_shop3> what are you building?
[15:56:39] <justanotheruser> roboarm
[15:56:57] <rue_shop3> justanotheruser, there was a fellow here a few years ago, who never built anything because he insisted that there was nobody with manufacturing tollerances good enough
[15:57:01] <rue_shop3> justanotheruser, keep talking
[15:57:05] <Tom_L> rue doesn't know about robot arms
[15:57:08] <rue_shop3> how big, what are you doing with it?
[15:57:16] <rue_shop3> Tom_L, :P
[15:57:29] <justanotheruser> I want it to mimick human arm strength
[15:58:00] <rue_shop3> hmh, and what torue and speed did you come up with for that
[15:58:01] <justanotheruser> neat, 2HSS86H has a torque loop
[15:58:44] <rue_shop3> justanotheruser, I'm really leaning towards you just being a talker
[15:58:45] <justanotheruser> rue_shop3: somewhere between 50 and 150 lb feet
[15:58:56] <rue_shop3> and degrees/sec?
[15:59:13] <justanotheruser> eh, don't care much about that, ideally at least 50rpm
[15:59:46] <justanotheruser> the combo I'm looking at has 88lb-ft @ 90rpm
[16:00:06] <rue_shop3> which joints are the motors for?
[16:00:07] <Tom_L> rue_shop3 did you ever get that installed?
[16:00:17] <justanotheruser> this one is for shoulder
[16:00:37] <rue_shop3> Tom_L, :/ no, I'm not working on the project, I'm just facilitating it
[16:01:13] <Martiini> motoman/kuka/abb/fanuc robotic arms are made in factories with precision tools, casted, milled, weigted to a gram, like car parts
[16:01:18] <rue_shop3> justanotheruser, looking forward at a human, I assume its for the Y axis pointing forward to you?
[16:01:39] <justanotheruser> basically
[16:01:45] <rue_shop3> how long is the arm
[16:01:55] <rue_shop3> the range of motion is 90 degrees?
[16:02:06] <justanotheruser> 180
[16:02:10] <rue_shop3> what is the target load capacity?
[16:02:28] <justanotheruser> 88lb-ft, 4ft, so around 15lb
[16:03:01] <rue_shop3> and what the effective weight of the arm at the endpoint?
[16:03:42] <rue_shop3> all the "I dont know" your saying, is what you need to have experience with before hand
[16:04:00] <justanotheruser> umm
[16:04:07] <rue_shop3> what are you using for the frame of the arm?
[16:04:11] <justanotheruser> I hvaen't said i don't know to any of your questions
[16:04:21] <justanotheruser> aluminium t slotted framing
[16:04:26] <rue_shop3> no, but I can hear your thoughts from here
[16:04:44] <justanotheruser> that is foolish
[16:04:48] <rue_shop3> :)
[16:05:11] <Tom_L> get integrated harmonic drives for each of the joint motors
[16:05:38] <justanotheruser> Tom_L: why
[16:05:48] <Tom_L> cause that's the shizzle
[16:05:49] <rue_shop3> so, the arm itself will pull about 4lbs off, atleast, so thats 16 foot-lbs
[16:05:58] <rue_shop3> if you have no motors on the arm itself
[16:06:09] <rue_shop3> hah, maths is out
[16:06:27] <justanotheruser> the elbow motor will be at the shoulder
[16:06:31] <rue_shop3> er, no that should be about right
[16:06:43] <rue_shop3> k
[16:06:59] <justanotheruser> t slotted aluminium is .5lb/ft
[16:07:24] <justanotheruser> however I will have 2 parallel extrusions
[16:08:04] * rue_house restart cooking lunch
[16:08:30] <justanotheruser> maximum torque from framing is 8lb-ft
[16:08:37] <Martiini> :) woow "integrated harmonic drives" .. yes, and.. carbon fibre robotic arm
[16:08:48] <Tom_L> oh hell ya
[16:08:59] <justanotheruser> my budget for this project is about $5k, I'm not planning on carbon fibre :p
[16:09:10] <Tom_L> 5k!!
[16:09:27] <Tom_L> buying everything new?
[16:09:28] <rue_shop3> hah, I could make it with a $20 budget :)
[16:09:29] <justanotheruser> I'm building 2
[16:09:38] <Tom_L> i don't care if you're building 50
[16:09:39] <justanotheruser> rue_shop3: only if your time and gas is worthless :p
[16:09:53] <rue_shop3> parts stock
[16:10:17] <rue_shop3> 300 degrees/sec
[16:10:30] <justanotheruser> rue_shop3: I'll give you $50 to build me one!
[16:10:35] <justanotheruser> to my specs
[16:10:39] <rue_shop3> no, I have my own projects
[16:10:43] <justanotheruser> exactly :p
[16:11:04] <rue_shop3> I'm looking for a matching motor
[16:11:11] <rue_shop3> do you need to be able to backdrive it?
[16:11:46] <justanotheruser> not sure how I would be able to get by without it?
[16:12:12] <rue_shop3> so, yes or no?
[16:12:13] <justanotheruser> I checked ebay, everything of similar torque and rpm was more expensive
[16:12:31] <justanotheruser> rue_shop3: how can something have a 180 deg range of motion without backdrive
[16:12:48] <rue_shop3> hmm, whats 300kg/4 inches?
[16:13:06] <justanotheruser> a really weird way to measure torque
[16:13:11] <justanotheruser> wait, that's not even torque
[16:13:31] <justanotheruser> you mean 300kg * 4 inches?
[16:13:47] <rue_shop3> 220 foot lbs
[16:13:52] <Martiini> robots with "kinetic teaching" (learning by motion) are best, no programming .. software matters a lot
[16:14:10] <rue_shop3> 300 degrees/sec...
[16:14:23] <justanotheruser> software will be the portion of this project I am more comfortable with
[16:14:31] <rue_shop3> whats the tangential velocity?
[16:14:51] <rue_shop3> Circumfrence is : 25.132742
[16:15:05] <justanotheruser> units?
[16:15:09] <rue_shop3> 50rpm...
[16:15:26] <justanotheruser> what does a human do, like 120?
[16:15:42] <justanotheruser> I'm not so concerned with rpm being as good as humans
[16:15:56] <rue_shop3> 300 degrees/sec so 25.13 inches/sec
[16:16:05] <rue_shop3> hmm, it wont do that...
[16:16:17] <justanotheruser> what are you looking at, ebay?
[16:16:27] <rue_shop3> never measured one f these tho
[16:19:38] <rue_shop3> 102mm
[16:20:30] <rue_shop3> about 18sec
[16:20:47] <justanotheruser> numbers
[16:20:54] <rue_shop3> 5.67mm/sec
[16:21:25] <rue_shop3> lunch, brb
[16:22:01] <justanotheruser> so is the only reason I shouldn't be buying this motor that it's overpriced/new?
[16:22:06] <justanotheruser> and gearbox
[16:24:35] <rue_shop3> caue you can get something for free that might work, still doing math
[16:25:27] <rue_shop3> so you want it to clip the arm the full 180 in more-or-less 0.6 seconds
[16:25:35] <rue_shop3> (not accounting for accel and deaccel
[16:25:36] <rue_shop3> )
[16:25:43] <rue_shop3> flip
[16:25:50] <justanotheruser> 0.6 is geed enough
[16:25:51] <rue_shop3> so your throwing something
[16:25:59] <rue_shop3> k
[16:26:21] <justanotheruser> it is better to be faster and worse to be slower, but I don't know of a bound
[16:26:41] <rue_shop3> 5.67mm/sec
[16:27:02] <rue_shop3> 300 degrees/sec
[16:27:28] <justanotheruser> more concerned with torque than speed
[16:27:48] <rue_shop3> yea, the difference is too large to make up
[16:28:14] <rue_shop3> 1.5" radius...
[16:28:42] <rue_shop3> 238.8mm
[16:28:45] <rue_shop3> dia
[16:30:24] <rue_shop3> hehe, how about 8.5 degrees/sec :)
[16:30:48] <rue_shop3> well, what I can say is they are avaialble fre
[16:30:49] <rue_shop3> e
[16:30:51] <Martiini> google is full of robot specifications PDF's for kuka, abb, motoman
[16:31:25] <rue_shop3> yea they use nice BIG motors with harmonic reduction
[16:32:15] <rue_shop3> prolyl good for 200% at 16 degrees/sec
[16:32:47] <justanotheruser> without context I have no idea what these numbers mean
[16:34:42] <rue_shop3> I have a solution thats only good for about 16degrees/sec
[16:34:53] <rue_shop3> unless your arm is spinning, rpm is a useless number
[16:35:00] <rue_shop3> degrees/sec is what you want
[16:35:07] <justanotheruser> ok
[16:35:24] <rue_shop3> do you live in canada/usa?
[16:35:36] <justanotheruser> USA
[16:36:23] <rue_shop3> whats the price of the motor/gearbox your looking at?
[16:36:29] <justanotheruser> 16deg/sec is pretty slow
[16:36:37] <justanotheruser> $400 total including shipping
[16:36:52] <rue_shop3> ...
[16:36:54] <rue_shop3> but...
[16:37:11] <justanotheruser> 280deg/sec
[16:39:20] <rue_shop3> http://www.harborfreight.com/compact-2-speed-1-2-half-inch-right-angle-drill-97622.html
[16:39:25] <rue_shop3> a widowmaker is only $130
[16:39:45] <justanotheruser> where is the torque
[16:39:56] <rue_shop3> :) its a widowmaker
[16:40:15] * justanotheruser reverse engineers it
[16:40:44] <rue_shop3> 8A 120V 340RPM
[16:40:56] <justanotheruser> 5lb-ft
[16:41:02] <justanotheruser> :/
[16:41:09] <rue_shop3> 960W @ 340rpm
[16:41:20] <rue_shop3> ?
[16:41:34] <justanotheruser> 984 watts at 1375rpm
[16:41:39] <rue_shop3> no 340rpm
[16:41:45] <rue_shop3> leave it in low gear
[16:41:59] <justanotheruser> 20lb-ft
[16:42:44] <rue_shop3> ? huh
[16:42:52] <rue_shop3> has to be an anomoly there
[16:43:02] <justanotheruser> ?
[16:44:06] <rue_shop3> 27N-m
[16:44:47] <justanotheruser> you're using 960 watts at 340rpm?
[16:44:55] <rue_shop3> huh
[16:45:19] <rue_shop3> yea, the two speeds are different gears
[16:45:28] <justanotheruser> yep
[16:45:38] <justanotheruser> I would need to gear it down further
[16:46:09] <rue_shop3> it would snap any gears you could find... thats why I'm confused
[16:46:17] <justanotheruser> huh
[16:46:28] <justanotheruser> how would it snap the gears
[16:47:00] <rue_shop3> the same way they breaks the arms of really large people
[16:47:49] <rue_shop3> thinking...
[16:50:01] <rue_shop3> Tom_L, does somehting seem out there that the torque on a widowmaker is 'just' 20 foot-lbs?
[16:51:13] <rue_shop3> not too many things like that use a universal motor
[16:52:22] <rue_shop3> I ahve things, but its stuff you prolly cant get
[16:52:54] <rue_shop3> .. whats
[16:53:01] <justanotheruser> so can I get a stamp of approval for what I linked
[16:53:36] <rue_shop3> it wont work, you have to make atleast one mistake before it goes right
[16:53:53] <rue_shop3> and you have never done anything like this before, so you will have lots of mistakes
[16:54:02] <justanotheruser> sure
[16:54:07] <justanotheruser> but I'd like to minimize them
[16:54:14] <rue_shop3> you should target $1250
[16:54:24] <rue_shop3> by the time your done, it'll be 5k
[16:54:24] <justanotheruser> is there any reason that the combination of that motor and the gearbox wouldn't work?
[16:58:35] <rue_shop3> how much was the gearbox?
[16:59:40] <justanotheruser> 118+91shipping
[17:00:49] <rue_shop3> ...
[17:00:55] <rue_shop3> your torque must be out
[17:00:57] <rue_shop3> http://www.princessauto.com/en/detail/60-1-horizontal-shaft-aluminum-worm-gear-speed-reducer/A-p8607392e
[17:01:05] <justanotheruser> out?
[17:01:11] <rue_shop3> no way that should fall short on torque
[17:01:23] <justanotheruser> is that nema34?
[17:01:43] <justanotheruser> max input horsepower is 1/2 :/
[17:01:57] <rue_shop3> I know
[17:02:19] <rue_shop3> things keep flagging to me that the torque numbers are wrong
[17:02:30] <justanotheruser> which torque numbers
[17:02:38] <rue_shop3> maybe its just cause your putting it direct to a shaft like that
[17:02:38] <justanotheruser> the one for the product you linked?
[17:03:42] <rue_shop3> something seems out to me
[17:03:48] <justanotheruser> this is $40 cheaper, but it isn't rated for the torque I want and it isn't nema34
[17:03:57] <justanotheruser> I think the best option at this point is what I linked
[17:03:59] <rue_shop3> then again, this is why I dont do cantalevered arms like that
[17:04:11] <rue_shop3> hmm
[17:04:19] <rue_shop3> well, tell me what goes wrong :)
[17:04:22] <rue_shop3> I cant see it
[17:04:28] <justanotheruser> you can't see it?
[17:04:45] <rue_shop3> yea I cant see whats going to go wrong
[17:04:53] <justanotheruser> ok cool, thanks!
[17:05:01] <rue_shop3> I think your gonna sheer your shaft connector
[17:05:35] <justanotheruser> because my torque will be too high?
[17:05:59] <rue_shop3> wtf, the 100:1 has an output max of only 256inch/lbs
[17:06:38] <justanotheruser> in*lbs you mean?
[17:07:05] <rue_shop3> yea
[17:07:10] <Martiini> Elon Musk (Tesla, SpaceX owner) wants to send humans to Mars, I tweeted to him that robots must be sent before humans :)
[17:07:17] <justanotheruser> rue_shop3: maybe its for baby motors
[17:07:20] <rue_shop3> 7/16
[17:08:02] <rue_shop3> ooh
[17:08:09] <rue_shop3> a human arm isn't 4'
[17:08:13] <rue_shop3> thats part of the error
[17:08:26] <rue_shop3> should be 2' to 3'
[17:08:33] <justanotheruser> your arm isn't 4 feet?
[17:08:34] <justanotheruser> manlet
[17:08:43] <rue_shop3> not to my shoulder
[17:09:02] <rue_shop3> I have a wide body in the middle
[17:09:15] <justanotheruser> it's a joke, no ones arm is 4'
[17:12:01] <rue_shop3> somewhere between 25.5 to 28 inches, but hard to tell cause of floating shoulders
[17:12:10] <rue_shop3> so, 15lbs
[17:12:25] <rue_shop3> 420inch-lbs (load)
[17:12:45] <rue_shop3> 35 foot*lbs + arm
[17:12:58] <rue_shop3> that starts to make sense
[17:13:36] <justanotheruser> and the arm is 8 ft-lbs
[17:13:48] <justanotheruser> well the arm frame
[17:14:47] <rue_house> the arm of my 12' mech is 50" and thats 2.5x as big as me
[17:19:29] <rue_shop3> (to the wrist)
[17:19:45] <rue_shop3> I dont ahve the torque numbers, but its airmuscle
[17:36:45] <Martiini> sci-fi robot stuff.. like, artificial muscles, portable nuclear powersource, quantum computer AI for brain etc
[19:05:22] <justanotheruser> ordered the motors
[19:05:30] <justanotheruser> gonna order my t slotted extrusions now
[19:31:04] <kasious> are they lead or asbestos extrusions
[19:32:46] <justanotheruser> load
[19:32:48] <justanotheruser> lead
[21:31:43] <anniepoo> 8cD Just finished a 'shop day' for the local pflag chapter. We did sheet metal and lathe
[21:48:56] <z64555> who daheck was Matiini
[23:34:25] <rue_shop3> hmm 30mm/min
[23:36:42] <z64555> Tearing up some serious asphalt, huh?
[23:38:54] <rue_shop3> I'm wondering if I should be running slower
[23:39:04] <rue_shop3> I expected more like 10mm/min
[23:39:22] <z64555> So, what is it? 3D printer?
[23:39:22] <rue_shop3> if I still have a bit on tommorow when it finishes, I'll know I was ok
[23:39:29] <rue_shop3> http://ruemohr.org/~ircjunk/projects/cnc/p1030107.jpg
[23:39:31] <rue_shop3> olde cnc
[23:40:06] <z64555> ah
[23:40:37] <rue_shop3> ooh, hmm, the new control box was for it..
[23:40:39] <rue_shop3> oops
[23:56:03] <Wetmelon> Dear lord what is that thing
[23:59:15] <Snert> I think there's a 286 under the heap.
[23:59:42] <Snert> might even be an 8080
{kind=link}
{kind=link}
{kind=link}