Back
[11:33:58] <blib> anyone here? :)
[11:34:12] <deshipu> no
[11:34:27] <blib> hi deshipu
[11:34:28] <blib> :)
[11:35:29] <blib> http://www.vexrobotics.com/vexpro/motors-electronics/217-4347.html vs
http://www.vexrobotics.com/vexpro/motors-electronics/217-3351.html - any recommendations?
[11:35:55] <deshipu> both lead to the same 404 page
[11:36:56] <blib> deshipu: your internet connection is broken?
[11:37:18] <deshipu> no
[11:39:11] <blib> deshipu:
https://paste.ubuntu.com/23461880/
[11:39:56] <blib> deshipu: I am guessing the top one to be more expensive than bottom one, but it's not - any ideas why?
[11:41:27] <deshipu> really can't help you without knowing what you want to use it for first
[11:42:07] <blib> deshipu: I'm building a large RC car
[11:42:33] <blib> deshipu: around 30 lbs of weigt. Need around 300+RPM from the motor.
[11:43:27] <deshipu> then those motors are way too fast for you
[11:56:22] <blib> deshipu: The plan is to gear them down 50:1
[11:56:24] <blib> or more
[12:20:25] <mrdata> blib, try to find torque-speed curves for the motors you are considering
[12:21:22] <mrdata> the reason for the price difference will probably be obvbious from that
[12:21:28] <mrdata> *obvious
[12:22:02] <mrdata> and you'll be able to select one that is the better match for your use
[12:33:00] <rue_house> huh, nobodys done proper slow motion of a microstepped stepper motor
[12:35:19] <z64555> like with a video camera?
[12:38:00] <rue_house> a high speed one
[12:38:15] <rue_house> I'd like to see how the motion betwen steps goes
[12:38:20] <rue_house> in slow mo
[12:41:12] <z64555> It probably overshoots and then quickly dies
[12:41:42] <z64555> well, actually, that depends on the load
[12:43:49] <rue_house> yea, I'd like to see what the microsteps and ringing are like
[12:45:47] <rue_house> wow, grbl was last added to in 2014, but its the core of all small machines today
[17:22:24] <malcom2073_> rue_house: Re grbl: If a wheel works, even if it's square, keep using it!
[17:49:29] <gmct> Hey, I'm looking to build a robot that can solve a Rubik's cube and part of the project will involve 3d printing some feet to attach to the stepper motors and I was wondering if anyone could give me some pointers for how to go about this?
[17:50:13] <gmct> I'm using Nema17 stepper motors so there's a shaft diameter of 5 mm and there's also a flat part of the shaft so it would be really cool if I could mimick that with the feet so that no screws are needed.
[17:50:24] <gmct> I'm using sketchup for the modeling.
[18:09:33] <kasious> so hows that working for you
[18:09:35] <kasious> sketchup that is
[18:10:13] <gmct> At the moment it's not since I have no idea how the hell to use it once the objects aren't supposed to be solid.
[18:10:58] <gmct> Are there significantly better alternatives for this sort of modelling?
[18:11:59] <Jak_o_Shadows> Ok. In 3D printing, you have solid models
[18:12:11] <Jak_o_Shadows> The infill, etc, stuff comes from the 3D printer software
[18:12:14] <Jak_o_Shadows> not your CAD model
[18:12:40] <gmct> Ah.
[18:14:02] <gmct> Could you give an example of 3D printer software or is it printer specific?
[18:14:15] <Jak_o_Shadows> Well, the settings are 3d printer specific
[18:14:24] <Jak_o_Shadows> Slic3r is common, and an old one
[18:15:47] <gmct> So it'll be able to set only specific parts of the model to be hollow?
[18:15:50] <gmct> https://www.youtube.com/watch?v=ixTddQQ2Hs4
[18:16:03] <gmct> this is the design I'm basing it off of.
[19:35:55] <z64555> gmct: so you have a D shaft on the stepper motors
[19:36:29] <gmct> yeah
[19:36:59] <z64555> since the feet are compressing against the rubics cube, you don't have any major forces that would pull the foot off of the shaft
[19:37:43] <gmct> Yeah i'm mostly worried about spinning.
[19:38:07] <z64555> so it would be OK to make a foot with the appropriate profile and not worry about needing a set screw, provided that the profile is tight enough and the sleeve is long enough to get significiant friction to stay on the shaft
[19:38:41] <gmct> I guess so.
[19:38:54] <gmct> The only issue is how do I make the foot with the hole
[19:39:04] <z64555> you can try the same foot designs with different sleeve thicknesses
[19:39:12] <z64555> that's easy
[19:39:23] <z64555> make the sleeve facing upward
[19:39:29] <gmct> I understand it's easy, I just don't know how to do it.
[19:39:42] <gmct> And?
[19:39:47] <z64555> that's it
[19:40:13] <gmct> No, I mean how do I print it with the sleeve?
[19:40:27] <gmct> Like the model is solid apparently but then I need the product to have the hole.
[19:40:39] <z64555> so make a hole in the model
[19:41:06] <gmct> Yeah, I can't figure out how to do that in sketchup.
[19:41:13] <gmct> Should I just use a different software?
[19:41:23] <gmct> I'm pretty sure I found something which had a feature like that.
[19:41:57] <z64555> eh, it might be something to consider. I haven't used sketchup before. I'll try getting it going on my machine to see if I can make a D-shaped hole
[19:42:39] <z64555> I'm at the end of my data limit for this month, tho, so it'll take awhile to download
[19:42:48] <gmct> Ah one of those ISPs.
[19:43:05] <z64555> better than paying $10 per 1GB over the limit
[19:43:30] <gmct> Well the ideal system is not having a limit
[19:43:38] <Jak_o_Shadows> Remember you could always file the 3D print down a little
[19:43:46] <Jak_o_Shadows> So I'd design an interference fit
[19:43:51] <Jak_o_Shadows> or at least transition.
[19:43:55] <Jak_o_Shadows> ie. just do it the same size
[19:44:14] <z64555> eh, we're talking about a hole here
[19:44:21] <z64555> not something external
[19:44:29] <gmct> Well the main issue is making a hole in the object with sketchup and I only have 7 hours worth of run time so I don't want to spend it not knowing what I'm doing.
[19:44:31] <gmct> And yeah.
[19:44:42] <gmct> It's a 5 mm diameter shaft so not much filing you can do in there.
[19:45:42] <gmct> Hmm I'm curious how the pi will handle Kociemba.
[19:46:45] <Jak_o_Shadows> I have a small fle set
[19:46:53] <z64555> gmct: while I'm waiting on sketchup to download, try drawing a circle, then drawn a secant line across the circle to make two D's
[19:47:26] <z64555> then delete the outside arc of the circle to have just one D
[19:47:35] <gmct> What size should the circle be?
[19:47:49] <z64555> slightly greater than 5mm
[19:48:01] <gmct> Is this just representing the hole?
[19:48:04] <z64555> yes
[19:48:08] <gmct> OK
[19:48:23] <z64555> once you have that on the plane, then draw the outside circle to represent the outside of the sleeve
[19:48:24] <gmct> because the entire foot has to be a good deal wider since the feet go on the outside of the center caps.
[19:48:29] <gmct> Ahhhh
[19:48:46] <z64555> and then finally select both the D and the circle, and pull that up off the plane
[19:48:53] <gmct> 5.3 sound good?
[19:49:01] <z64555> too large
[19:49:05] <z64555> 5.1mm at most
[19:49:29] <Jak_o_Shadows> agrered
[19:49:36] <gmct> Should I take a gamble and set it to 5 and then just bruteforce if it doesn't fit?
[19:49:57] <gmct> I don't have any sort of file set and we don't have that much of a budget for the robot.
[19:50:07] <gmct> Or just reprint
[19:50:47] <z64555> not knowing how flexible your plastic is, I wouldn't recommend bruteforcing anything. It might shatter
[19:50:57] <Jak_o_Shadows> In my experience interior holes are pretty good. But at the same time, 0.1mm is not very much, so you should definitely make it bigger
[19:52:11] <z64555> there's also the matter of thermal expansion, plastic is less thermally conductive than metal, so it expands slower under the same heat source
[19:52:56] <gmct> Well there's also the matter the shaft isn't a perfect D
[19:53:07] <gmct> I think
[19:53:15] <gmct> Let me take another look.
[19:53:31] <Jak_o_Shadows> it'dbe pretty good
[19:54:54] <gmct> Yeah no, only about 3/4 of the way up the diameter does it flatten out.
[19:54:57] <gmct> Not 50/50
[19:56:20] <Jak_o_Shadows> oh yeah, probably
[19:56:39] <gmct> Maybe even like 7/8
[19:56:56] <gmct> An arc works perfectly for this if I can figure out the proportions.
[20:00:41] <rue_shop3> aparently if you want to give something the most popular part number ever, use LS400
[20:02:37] <gmct> Wait I think I just actually nailed it.
[20:02:45] <rue_shop3> I had to break out the microscope to read the part number off the die too
[20:03:32] <gmct> Holy shit I actually nailed it with my shitty guesstimation I think
[20:04:37] <gmct> Eh actually I'll need a ruler to really nail it.
[20:04:45] <gmct> But I'm on the right track
[20:05:29] <gmct> That works.
[20:05:37] <rue_shop3> why does a colour printer, have two IR cameras in the paper path?
[20:05:51] <gmct> Now I just need to measure the center caps on the sacrificial cube.
[20:06:50] <Jak_o_Shadows> velocity measurement?
[20:08:43] <rue_shop3> the chip is LC400N, but I cant find any infot on it
[20:09:25] <rue_shop3> oooh
[20:09:38] <rue_shop3> it probably for automatic alignment of the colours
[20:16:42] <gmct> Alright so I got a game plan.
[20:17:00] <gmct> I measure the height of the shaft up to the flat part.
[20:17:07] <gmct> subtract that from 5.
[20:17:21] <gmct> Make that the height of the arc and set radius to 2.5 and get value from calculator.
[20:40:10] <Tom_L> rue_shop3, maybe color balance and paper color
[20:40:24] <Tom_L> i have one that samples paper color before printing
[21:24:20] <branjb> anyone done differential drive path planning?
[21:27:34] <branjb> i'm trying to guide a differential robot by taking current position, the angle to the new position relative to my robot(beta), and the orientation of my robot w/r/t origin(theta), and trying to drive the difference between theta and beta to zero and then head straight there. does anyone know what this method or approach is called?
[21:28:42] <z64555> "Face and advance"
[21:28:45] <z64555> I guess
[21:33:44] <codepython777> anyone here?
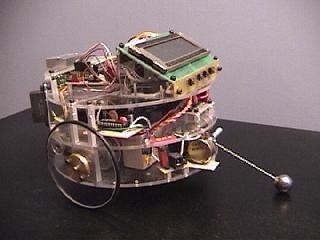
[21:34:01] <Tom_L> http://www.geology.smu.edu/dpa-www/robots/sr04/index.html
[21:34:04] <malcom2073_> 86 bodies
[21:34:06] <Tom_L> branjb you want' to read that
[21:34:14] <Tom_L> mostly dead ones
[21:37:36] <codepython777> :) What is VP?
[21:38:08] <codepython777> Am reading a post which says -> "1296 used BAGs with VPs pretty extensively in 2015 "
[21:40:22] <branjb> thanks, that looks like a good resource
[21:40:38] <Tom_L> he's pretty sharp
[21:40:44] <Tom_L> check his other bots too
[21:40:56] <branjb> not sure if it's different than "face and advance" but I'm changing my angle while moving forward, rather than in place
[21:41:05] <Tom_L> that one deals with what you were asking
[21:41:10] <branjb> awesome
[21:41:40] <Tom_L> dig a bit and you will probably find what you're after
[21:43:45] <Wetmelon> branjb: Idk, but I did that with a sumo robot
[21:43:57] <branjb> did it work well?
[21:44:02] <Wetmelon> algorithm worked fine - very simple PID with a gyroscope integrator - but the drivetrain was shit
[21:44:15] <branjb> haha
[21:44:39] <Wetmelon> Vex hardware no bueno :P
[21:44:41] <Tom_L> http://tom-itx.no-ip.biz:81/~webpage/sumo_files/sumo_new_index.php
[21:44:44] <branjb> i'm only using encoders and a magnetometer right now
[21:44:49] <Tom_L> mine was too short to be a problem
[21:46:33] <codepython777> Tom_L: Which motor?
[21:46:55] <Tom_L> some motors from a CC machine that ejected the card iirc
[21:46:59] <Tom_L> or something similar
[21:47:06] <Tom_L> quite strong and low geared
[21:47:40] <Tom_L> some sort of 'vending' machine
[21:48:13] <codepython777> Tom_L: I was wondering how does gearing down high speed motors effect heat dissipation?
[21:49:02] <Tom_L> dunno, these never ran hot
[21:51:17] <branjb> http://imgur.com/a/yDJ7D that's the one i am working on right now
[21:51:52] <Wetmelon> codepython777: P = I^2 * R = Torque * RPM
[21:51:59] <branjb> had a better pic but i think it's gone
[21:52:34] <Wetmelon> Torque is generally = I * Ki, so double the RPM = 1/2 torque = 1/2 current = 1/4 power dissipation
[21:52:35] <codepython777> Wetmelon: so if you have a 10000rpm motor vs a 1000rpm motor - with the same power - and you need 300rpm output - why pick one vs the other?
[21:53:12] <codepython777> I meant to ask, if the torque is same at 300rpm
[21:53:19] <codepython777> for both motors
[21:53:41] <Wetmelon> Usually just efficiency at that point
[21:53:52] <Tom_L> http://tom-itx.no-ip.biz:81/~webpage/maxbot/balance01.jpg
[21:53:57] <Tom_L> spent the most time on that one
[21:54:03] <codepython777> Wetmelon:
http://www.vexrobotics.com/217-3351.html vs
http://www.vexrobotics.com/217-4347.html
[21:55:48] <Tom_L> those look like money sucking sites
[21:56:16] <codepython777> Tom_L: ?
[21:56:45] <Tom_L> all my junk was made from scraps
[21:57:02] <Tom_L> nothing purpose made from a robot site
[21:57:24] <Tom_L> old printers, copiers etc
[21:57:44] <Tom_L> heh, vending machine motors...
[21:57:59] <Tom_L> rue does his the same way
[21:59:38] <Tom_L> haven't touched one in probably 5yrs now though
[21:59:58] <Wetmelon> Vex is $$$
[22:00:36] <Tom_L> http://tom-itx.no-ip.biz:81/~webpage/motors/gearhead5.jpg
[22:00:48] <Tom_L> those were probably $300 motors originally
[22:01:17] <codepython777> Wetmelon: I want something I can depend on and which will last
[22:01:29] <Tom_L> http://tom-itx.no-ip.biz:81/~webpage/motors/gearhead3.jpg
[22:01:36] <Tom_L> those were some of the sumo motors
[22:01:50] <codepython777> Tom_L: how did you get them? how much? used?
[22:01:59] <Tom_L> various places
[22:02:04] <Tom_L> some were off ebay cheap
[22:02:23] <Tom_L> never spent much on any bot
[22:02:31] <codepython777> Tom_L: do they work? Also, I'm currently using a dc motor controller. I'll have to change that if i went with maxon, right?
[22:02:42] <Tom_L> why?
[22:02:52] <Tom_L> they're brushless dc
[22:02:58] <Tom_L> i used a regular dc hbridge
[22:03:04] <codepython777> My current motor controller is brushed dc
[22:03:15] <Tom_L> i made my controller
[22:03:27] <codepython777> brushless needs different control than brushed, right?
[22:03:46] <Wetmelon> Yes
[22:04:11] <Wetmelon> Well, generally speaking. Sometimes they hide the brushless control behind a 2-wire input
[22:04:35] <Tom_L> those are all in a box in the attic now
[22:04:57] <Wetmelon> "Brushless DC" motors are 3-phase permanent magnet AC motors, often driven with a "trapezoidal" wave instead of a pure sine wave
[22:05:19] <codepython777> Wetmelon: I'm looking for a 300rpm , > 100kgf-cm torque, 12v -reliable dc brushed motors . Any recommendations?
[22:05:59] <codepython777> Was looking at 775 or bag motors that i linked, geared down
[22:06:29] <Tom_L> http://tom-itx.no-ip.biz:81/~webpage/pdf/MC68332/maxonmotor.pdf
[22:06:37] <Wetmelon> 1400 oz-in? jeez
[22:07:02] <Tom_L> http://tom-itx.no-ip.biz:81/~webpage/pdf/MC68332/maxonmotor1.pdf
[22:07:38] <codepython777> Wetmelon: 1400oz-in, would be nice
[22:07:42] <Tom_L> those were the maxon ones
[22:07:54] <Tom_L> http://tom-itx.no-ip.biz:81/~webpage/pdf/MC68332/maxongear.pdf
[22:07:58] <Tom_L> and the gearhead
[22:08:03] <codepython777> Tom_L: I cant afford maxon
[22:08:12] <codepython777> Tom_L: I need something new, that I can buy more than one set
[22:08:20] <Tom_L> how many sets?
[22:08:37] <codepython777> 7 for starters, then need replacements, since i break them often
[22:08:38] <Tom_L> i have iirc, 9 of those in the attic
[22:08:48] <codepython777> 7 sets = 28
[22:08:58] <Wetmelon> This is what I was thinking of getting, but they're nowhere near the torque you need
https://www.pololu.com/category/115/25d-mm-gearmotors
[22:09:02] <Tom_L> guess you're out of luck then
[22:09:26] <codepython777> Wetmelon: Indeed pololu is not for me
[22:09:54] <codepython777> Tom_L:
http://www.vexrobotics.com/217-3351.html vs
http://www.vexrobotics.com/217-4347.html - They are at least cheaper than maxons
[22:10:09] <Tom_L> for sure
[22:10:23] <Tom_L> but iirc i gave maybe $15-20 for them
[22:10:31] <codepython777> I am not sure how much can i run them continuously
[22:11:10] <codepython777> Tom_L: Can you look at the specs of those - which one would you pick for the 300rpm gearing down, and why? (for the torque I am looking at)
[22:12:39] <Tom_L> depends what the gearbox is
[22:13:08] <codepython777> Tom_L: They sell expensive gearboxes to go with them. I could gear them both down to 400rpm or so
[22:14:35] <Tom_L> those would be ~120 a set
[22:14:43] <Tom_L> more than i would put on any bot
[22:14:54] <codepython777> Tom_L: Encoder + gear + motor = $100 around
[22:14:58] <Wetmelon> Let's see.. 300rpm, 100 kg-cm, that's 10.47 rad/s * 9.807 N-m = that's only 100 watts? O.o
[22:15:00] <Wetmelon> seems low
[22:15:48] <Tom_L> so closer to 200 a set
[22:15:54] <Tom_L> no thanks :)
[22:16:11] <codepython777> If I do 2 motors per rc car - yes $200 for motors+encoders
[22:16:16] <Tom_L> i don't work off a grant here
[22:16:27] <Tom_L> those guys don't care what they spend
[22:17:04] <codepython777> Tom_L: I need something that will last and work - any recommendations ?
[22:18:00] <Tom_L> http://www.ebay.com/sch/i.html?_from=R40&_trksid=p2050601.m570.l1313.TR0.TRC0.H0.Xrobotic+gear+motor.TRS0&_nkw=robotic+gear+motor&_sacat=0
[22:18:02] <codepython777> Tom_L: I had a $30 chinese motor last time - it lasts for a few hours - then poof
[22:18:29] <Tom_L> yup
[22:18:48] <Tom_L> so find good ones cheap like i did
[22:19:25] <codepython777> Tom_L: I need something replaceable - I cant buy ebay, and then find out 3 months down the lane that the motor doesn't sell/exist/or sold out
[22:19:51] <Tom_L> is this for a classroom setting or something?
[22:20:09] <codepython777> Tom_L: its for a lab experiment
[22:20:16] <Wetmelon> codepython777:
http://www.ampflow.com/small_high_performance_motors.htm you can gear up one of the F24-150's
[22:20:21] <Wetmelon> gear up/down whatever
[22:20:48] <Wetmelon> I've heard these called "short mags" or "long mags"
[22:21:08] <codepython777> Wetmelon: 24v - 12v requirement - is that an issue?
[22:21:41] <Wetmelon> You can run them at 12v but you'll get less power out obv
[22:22:58] <Tom_L> http://tom-itx.no-ip.biz:81/~webpage/motors/gearhead1.jpg
[22:23:05] <Tom_L> those even came with encoders
[22:23:09] <Tom_L> cheap
[22:23:24] <codepython777> Wetmelon: how do i gear it down 10:1?
[22:23:28] <Tom_L> still haven't used those yet
[22:23:38] <Wetmelon> idk, gearbox :D
[22:23:53] <Tom_L> harmonic drive =)
[22:23:59] <Wetmelon> Single-stage planetaries are good for ~ 3-12:1 reductions
[22:24:08] <Wetmelon> might cost you a couple hundred
[22:24:09] <Tom_L> typically those are higher reduction though
[22:24:49] <codepython777> Tom_L: Those seem to be only available from ebay
[22:24:50] <branjb> PID loops are the coolest thing ever
[22:25:01] <Tom_L> branjb yes they are
[22:25:11] <Tom_L> better than sex
[22:25:13] <Tom_L> well almost
[22:25:17] <codepython777> Tom_L:
http://www.robotshop.com/en/12v-120-rpm-dc-motor-641.html?gclid=CIufpMKpotACFdgOgQodL9UFsw
[22:25:29] <branjb> what do you think a PID loop for sex's parameters would be?
[22:25:34] <branjb> that's the fun in PID loops
[22:25:44] <branjb> finding the correct ways to interpret input and output
[22:26:16] <Tom_L> too hard to control with a PID loop
[22:26:20] <Tom_L> must run open loop
[22:26:24] <branjb> haha
[22:26:27] <Wetmelon> lol
[22:26:41] <branjb> i can give a heading to my robot now and it turns and starts driving in that direction
[22:26:57] <Tom_L> what i meant to say on the maxons is they were coreless
[22:27:01] <branjb> might be minor, but took me all day haha
[22:27:08] <Tom_L> those look decent to me
[22:27:37] <codepython777> Tom_L: which is decent?
[22:27:47] <Tom_L> the Faulhaber
[22:27:50] <codepython777> the robotshop one?
[22:27:52] <codepython777> no torque
[22:27:54] <Tom_L> maybe a little hot on gearing
[22:30:12] <branjb> i'm using these, it took me forever to realize the data sheet was wrong:
[22:30:12] <branjb> http://www.robotshop.com/en/pololu-gearmotor-encoder-2274.html
[22:30:53] <branjb> the pulses per revolution on the output shaft was 1/3 the amount of 2249 they listed
[22:30:55] <codepython777> Tom_L:
http://www.magmotor.com/ - ever worked with these?
[22:31:23] <codepython777> Neodymium Magnets vs Ferrite, which one?
[22:33:49] <codepython777> Wetmelon:
http://www.magmotor.com/brushed/sr15.pdf ?
[22:43:01] <branjb> hmm
[22:47:51] <z64555> branjb: oh
[22:47:55] <z64555> That's a bezier path
[22:48:42] <z64555> named so because of the bezier-like curve it makes
[22:49:05] <branjb> ah, nice, i knew there must have been a name for it
[22:51:28] <Tom_L> Neodymium are by far stronger
[22:51:40] <z64555> Jak_o_Shadows: I am now less dumb about interference fittings
[22:52:23] <z64555> gmct was the one doing the 3D printed rubics cube foot, right?
[22:56:28] <Jak_o_Shadows> aye
[22:56:54] <Jak_o_Shadows> Yeah. I might have the tendency to use too technical/specific words sometimes
[22:57:06] <codepython777> Tom_L: Thanks
[22:58:27] <z64555> Jak_o_Shadows: I made the mistake of not asking about it then, I thought it was something different
[23:04:16] <gmct> Yeah
[23:04:26] <gmct> I got it figured out I'm pretty sure.
[23:04:28] <gmct> Will upadate
{kind=link}
{kind=link}
{kind=link}
{kind=link}