Back
[00:16:45] <rue_house> I was listening to a recording of a meeting I was in
[00:17:18] <rue_house> I'm concluding that I think using thoughts completely consisting of the work 'umm' and that quite a lot of it dosn't get translated properly
[00:30:39] <rue_house> haha thingiverse it broken, they cant load more hits
[00:40:10] <mrdata> orlock, congrats
[00:41:32] <rue_house> orlock, better luck next time, on the injuring people
[00:43:29] <mrdata> heh
[00:43:51] <mrdata> injuring judges may count against you
[00:44:09] <rue_house> so to win you have to injure the other contestants?
[00:51:51] <mrdata> i guess that's how it works
[00:59:13] <theBear> probly best to cover yer ass and injure anyone likely to be in the courtroom, perhaps the entire building, on that day
[01:00:00] <theBear> no 2nd chances in the legal arena, well, except ya know, for appeals i suppose, which i actually think might be rather common, at least when someone loses :)
[01:15:29] <anonnumberanon> rue_house, with all due respect get off your high horse and actually try to make us understand what the heck proble you are trying to solve, draw it, or make an animation or something but so far these past (at least) 3 days it's sounded like a toddler's dream.
[01:17:35] <anonnumberanon> make the 3 triangles be 120 degreenightsk and you know they can't pass each othere and stuffs and stuffs
[01:17:46] <anonnumberanon> :)
[09:19:58] <rue_house> points
[09:20:44] <rue_house> so your robot is somewhere in the middle of 8 beacons, the robot knows the absolute beacon positions via datatable and knows the angles from where it is to each beacon
[09:20:59] <rue_house> to triangulate its position, it needs to choose 3 beacons to do the math
[09:21:13] <rue_house> the best beacons to choose are the ones closets to 120 degrees apart
[09:21:23] <rue_house> closest
[09:28:28] <JT-Shop> sounds like a fun calculation
[09:29:05] <rue_house> wieghing the availabel beacons is more of a challange than I thought
[09:54:12] <SpeedEvil> Kalman!
[09:57:01] <rue_house> not familiar, elaborate
[09:59:02] <mrdata> sort them by angle?
[10:00:22] <rue_house> not just 1 angle tho
[10:00:42] <mrdata> what else is there
[10:00:58] <rue_house> you have to find the angles that best fit 120 degrees between all 3
[10:01:06] <rue_house> float angles[] = { 0, 90, 180, 260 };
[10:01:08] <rue_house> 4 beacons
[10:01:14] <mrdata> there is such a thing as good enough
[10:01:28] <rue_house> tell a computer
[10:01:38] <mrdata> maybe if they are 100 to 140 degrees apart it's okay
[10:01:48] <rue_house> how do you find the best fit for 12e degree difference between them
[10:01:58] <rue_house> 120
[10:02:28] <mrdata> put them into a sparse array? and partition the array
[10:02:46] <rue_house> float angles[] = { 0, 90, 180, 260 };
[10:03:10] <rue_house> find the best fit for 3 that are the closest to 120 degrees apart
[10:03:54] <mrdata> i thought you said you had 8 beacons
[10:04:28] <rue_house> thats an example of 4
[10:07:14] <rue_house> float angles[] = {298.000000, 17.000000, 235.000000, 207.000000, 253.000000, 282.000000, 249.000000, 265.000000, };
[10:07:23] <rue_house> less the extra comma, there is a challanging set
[10:07:28] <mrdata> ok,
[10:09:06] <rue_house> tho, technically in that example, the robots outside the beacon field
[10:11:02] <mrdata> sorting would give you {17., 207., 235., 249., 253., 265., 282., 298. }
[10:11:02] <mrdata> ; but let's give the sparse array 18 elements, say, representing sectors 20 degrees apart
[10:13:36] <mrdata> then 17 goes into sector 0, 207 goes into 10, 235 into sector 11, 249 and 253 into sector 12, 282 and 298 into 14
[10:14:05] <mrdata> pick any sector with a beacon in it
[10:14:16] <mrdata> say 0,
[10:14:41] <mrdata> look in the sector 120 degrees from it (in this case sector 6)
[10:15:14] <mrdata> if there are no beacons, scan adjacent sectors, (so 7 and 5)
[10:15:35] <mrdata> work outwards (8 and 4, 9 and 3, ...)
[10:17:17] <mrdata> 10 has a beacon; take average of first two beacons (17 + 207)/2 = 112; look opposite that, (292) so check sector 14
[10:18:48] <mrdata> so beacons in sectors 0, 10, and 14 would be okay to pick; are they optimal? i dont care, it's a heuristic
[10:23:50] <mrdata> one refinement: check at +/- 120 from the first beacon, so sector 6 or 12 is okay. 12 has a beacon, avg (17 - 107)/2 = -45; opposite is 135 which is sector 6; this way might pick 0, 12, and 10
[10:24:32] <mrdata> are sectors 0,10,14 superior to 0,10,12 ?
[10:24:37] <mrdata> idk
[10:27:35] <mrdata> the heuristic works better if the robot is still within the bounds se for it
[10:27:37] <mrdata> set
[10:30:27] <mrdata> if you must find optimal, then iterate this over every beacon as the starting point and score them
[11:49:53] <theBear> but does the robot enjoy working near the heuristic enclosure ?
[11:50:18] <theBear> heuristics are a bit like yetis, right ?
[11:50:59] <theBear> i think their bounds finish right up near their cousin, the hysteresis zone <wink>
[11:51:34] <theBear> heh, hysteresis zone sounds like it is alarming when it starts happening to you, and is probably just either side of menopause, if i had to take a guess
[12:06:42] <anonnumberanon> rue_house, my program design intuition would know how to start solving this but I haven't implemented such an algorithm before. So you would want to calculate all permutations of three elements in your 8 elements array. After making that list, calculate the spread from 120 on each of those. Then sort this list of spreads and the first element of that sorted list is your triple of beacons.
[12:07:09] <anonnumberanon> permutations: something I have been wanting to implement for a while
[12:07:29] <veverak> this sucks
[12:07:33] <veverak> I wanted to make robots
[12:07:51] <anonnumberanon> calculating the spread though, I'm not sure yet how I would solve that
[12:07:55] <veverak> not go throuhg buch of academic papers to check if by any chance I am not using something somebody alse wrote paper about
[12:07:57] <veverak> :/
[12:08:22] <veverak> anonnumberanon: btw: merging covariance matrixes should be just their multiplication
[12:09:00] <anonnumberanon> yes veverak but how do you come up with the covariance matrix in the beginning?
[12:11:05] <veverak> you got arm of length 'n' with angle 'x' that got variance
[12:11:12] <veverak> (this only makes sense for small variance)
[12:11:39] <veverak> if variance is small, the 'path' to which that arm can viggle should be close to 'line'
[12:11:55] <anonnumberanon> veverak, i understand you start with a point cloud which can be data samples from a sensor, or a math formula that represents it like the sphere around each leg" tip, but then the actual problem to solve is how to make the matrix from that
[12:12:06] <veverak> wat
[12:12:08] <veverak> no point cloud :)
[12:12:26] <veverak> yeah, math formula that represents sphere-like shape around leg tip
[12:12:29] <anonnumberanon> yeah i know, you cant get one with your application
[12:12:35] <veverak> good
[12:13:03] <veverak> point of covariance matrix is to represent elipsoid actually (makes no sense for sphere)
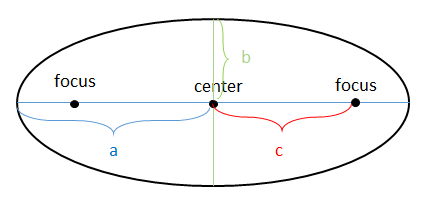
[12:13:54] <veverak> anonnumberanon: let's use this as reference
http://www.softschools.com/math/calculus/images/finding_the_foci_of_an_ellipse_img_2.png
[12:14:41] <veverak> practically, this translates into matrix as follows: [ [a^2, 0] [0, b^2] ] ( I think? )
[12:15:59] <veverak> reason it's matrix and not vector of two values
[12:16:13] <veverak> is that practically you want to rotate the elipse to better fit your usecase
[12:16:29] <veverak> that's done by just using 'point rotation matrix' on the simple matrix above
[12:16:41] <veverak> (that's based on articles I found, not tested yet)
[12:17:51] <veverak> anonnumberanon: so, to represent how something vary, you need point and on your use case: A. have one parameter to define sphere B. have two parameters to define elpise C. have 2x2 matrix to define rotated elipse
[12:18:19] <veverak> (it works the same in 2d, it's just more complicated to explain ;) )
[12:19:46] <veverak> variables itself are variances for normal gaussian
[12:31:16] <anonnumberanon> fveverak> practically, this translates into matrix as follows: [ [a^2, 0] [0, b^2] ]
[12:31:21] <anonnumberanon> so... does it really?
[12:34:30] <veverak> it should as far as I know :)
[12:34:37] <veverak> as long as the elipse is aligned to axis
[12:36:15] <veverak> anonnumberanon: want to test it
[12:46:33] * anonnumberanon found holy grail https://www.cs.utexas.edu/users/djimenez/utsa/cs3343/lecture25.html
[12:47:12] <anonnumberanon> veverak, you know how you'll test it yet?
[12:49:32] <veverak> anonnumberanon: I assume that ros should have something somewhere to visualize it
[12:49:41] <veverak> than it's just question of making random data
[12:49:46] <veverak> making matrix from that
[12:49:47] <veverak> profit?
[12:49:50] <veverak> ;)
[12:51:16] <anonnumberanon> :3
[13:10:59] <veverak> but
[13:11:06] <veverak> because I have to go every article about quadruped there is
[13:11:17] <veverak> to be sure, that I don't use somethign somebody else figured out without referencing
[13:11:19] <veverak> that will take a while
[13:11:29] <veverak> (and yeah, I am crying like a little baby about it)
[13:14:05] <theBear> yeah totally, cos the maassive million dollar legal teams handling that stuff for the very titans of their respective industries, they are constantly "discovering" former work and doing the right thing by withdrawing any applications, and if they really like the idea, paying the actual thinker-upperer fair royalties for re-using it
[13:15:48] <theBear> hang on... they do the very opposite of that ! and unless yer somewhere with the 1 in 100 strict rules in the pat. dept, as opposed to the nearest 99 other countries, i dare say you might not do the opposite, but "reasonable effort to discover prior works" or simialr words, surely can't be much for an individual
[13:17:47] <theBear> also using the standard patent style/legal-abstract-definition boilerplate like every patent you can remember seeing ever, helps toclose a lotta holes where you could get in trouble for stuff you didn't even steal, letalone mean to have included in your patent definitons :)
[13:19:33] <deshipu> sometimes I think there should be a simpler way of encouraging discoveries to be published
[13:19:46] <veverak> theBear: this is much simpler problem
[13:19:49] <veverak> theBear: "Bc thesis"
[13:19:59] <deshipu> like, for instance, requiring publishing of complete documentation of anything you are selling, or you can't sell it
[13:20:10] <veverak> theBear: if my oponent finds something in my thesis that is in some other thesis hi will hit me with it
[13:20:31] <veverak> only lucky thing is that there is no robotics department on my university
[13:20:37] <theBear> dare i ask , you mean columbia, but the one without th ecoke, the redcoats, the oppressors, that kinda deal ?
[13:20:53] <veverak> or any other person than me that is
[13:20:59] <veverak> theBear: what? :)
[13:21:04] <theBear> wtf is a bc
[13:21:08] <veverak> ah
[13:21:10] <veverak> sec
[13:21:12] <deshipu> bechelor
[13:21:16] <deshipu> bachelor
[13:21:19] <veverak> bachelor
[13:21:20] <theBear> oh... that's umm wrong
[13:21:21] <anonnumberanon> big cock
[13:21:21] <veverak> yeah
[13:21:23] <veverak> :)
[13:21:33] <theBear> it should be three letters
[13:21:34] * veverak got allready 20 papers
[13:21:37] <theBear> but now you broke me
[13:21:40] <anonnumberanon> bachelor is BS
[13:21:56] <veverak> and I didn't strated search another ones by going through references of what I've got and what uses papers I've got
[13:21:58] <theBear> pfft, i must have more than 20 just on this desk in unopened or wilfully ignored mail :)
[13:21:59] <anonnumberanon> nvm im wrong sorry
[13:22:03] <theBear> Ba
[13:22:07] <anonnumberanon> BS is bachelor of science
[13:22:25] <deshipu> BAA
[13:22:25] <theBear> well, i spose we all know how many of them i got suddently :)
[13:22:47] <veverak> P.S: I am now pretty sure I want same topic on my magister thesis
[13:22:56] <veverak> less papers to go through
[13:22:59] <deshipu> master
[13:23:03] <veverak> master!
[13:23:10] <deshipu> the stupid English people call it "master"
[13:23:19] <veverak> well, funny thing is
[13:23:33] <deshipu> as if it had anything to do with mastery
[13:23:35] <anonnumberanon> >everyone in the world does but me
[13:23:55] <veverak> that most of people in my country have "Ing." (Ingeneer) title from technical university
[13:24:05] <veverak> while on my faculty of informatics, we have "Mgr." as Magister
[13:24:25] <theBear> meh, it's only i a little one, so long as you don't somehow end up with an in-house fa trois ? fatwha ? you know, foregin thing you don't want, specially from a dude that lives somewhere tall the males over age 10 still carry non-decorative scimatars or some other ridiculous duelling swords 24/7 :)
[13:24:33] <deshipu> anonnumberanon: most languages actually call it 'magister', it's from Latin or something
[13:25:31] <theBear> if you can manage that, basically avoid any kinda blood/death oaths being sworn against or involving you till you earner the D in your Doctor coming sooner every day, noone willever spend as much time as we have checking up onyer
[13:25:44] <theBear> heh ing is funy
[13:26:04] <theBear> informatics ? well, at least that confirms that you also made up magister <grin>
[13:26:08] <anonnumberanon> hehe, okay okay
[13:26:26] <theBear> next you gonna tell me to see a milliner to try salvage my poor hat after you make me eat it <wink>
[13:31:24] <theBear> "Yes, we went to dinner at a nice restaurant, then back to her place for a nightcap before saying goodnight. Oh, on the upside I did finally get to see Miss Slocum's famous pussy ! Maybe that'll be enough that we can get through a whole morning until after teatime without her mentioning something inane like what it had for breaksfast today, or what it killed and left as a gift on her bed !" hehe
[13:43:27] <anonnumberanon> rue_house, okay, I have the spread from 120deg algorithm. Still have to understand how to compute combinations/permutations of 3 angles from an angles array though.
[14:08:12] <anonnumberanon> Also, the number of possible combinations of 8 angles is 56.
[14:08:34] <anonnumberanon> I found code to list them. Just gotta own that code a bit.
[14:09:15] <anonnumberanon> I feel like there is a lot of bit magic in it that I want to understand.
[14:16:43] <JT-Shop> for x(1 to 6) for y (x to 7) for z (y to 8)
[14:17:03] <JT-Shop> in Python sorry for i in range(1, 7):
[14:17:04] <JT-Shop> ... for j in range(i + 1, 8):
[14:17:04] <JT-Shop> ... for m in range(j + 1, 9):
[14:17:04] <JT-Shop> ... print i, j, m
[15:30:17] <JT-Shop> http://paste.ubuntu.com/23252685/
[15:30:40] <JT-Shop> python code to find the best match of any 3 of a list of 8 to a number
[15:40:21] <theBear> err, you mean like 'mode' ?
[15:40:44] <theBear> remember, mid to late primary school maths class ?
[17:25:45] <JT-Shop> http://paste.ubuntu.com/23253034/
[17:25:51] <JT-Shop> and in C
[17:27:01] * JT-Shop notes that it is friday and time for a Wiehenstephaner
[17:40:54] <anonnumberanon> Today's Thursday.
[17:55:53] <JT-Shop> rue_house:
http://paste.ubuntu.com/23253214/ does this give you the right answer
[17:56:16] <JT-Shop> Friday for me... I'm off for 4 days my wife said so
[18:29:56] <theBear> you could only be more if you were the Dancing Fool , a close persional friend of the sheik here
[18:30:18] <theBear> err, heh, more WRONG
[18:31:02] <theBear> https://www.youtube.com/watch?v=PSdkPMc7aEo that'll wake yer up and let yer smell the friday more clearly
[18:31:45] * theBear notes he is having a lot of trouble with tabs and windows being the right one while he is at them
[18:57:28] <anonnumberanon> hey theBear have you seen this yet?
https://www.youtube.com/watch?v=0qo78R_yYFA
[19:14:29] <theBear> nope and apparently 5 seconds in, then i get as close as a hermitlike myself possiblewcan maybe, pretty close... and i say now YOU tell me, do i really want ot see it, or eeven give the slightest of eff?
[19:15:00] <veverak> hmm
[19:15:02] <veverak> chmm
[19:15:10] * veverak needs to study selflearning robots
[19:15:13] <veverak> the more I design algorithms
[19:15:26] <veverak> the more I feel the need for robot to figure out some parameters rather than manually setting them
[19:15:28] <rue_house> all try the code~
[19:15:30] <rue_house> !
[19:15:31] <rue_house> ]\l'ksdf dfjklg
[19:23:02] <veverak> hmm
[19:23:24] <veverak> how would one be able to detect that leg of quadruped "will move and body will be stable" or "tip of leg will stay on place and leg will move" ?
[19:23:29] <veverak> (or something between it)
[19:23:42] <z64555> inverse kinematics
[19:23:44] <Tom_itx> carefully planned code
[19:24:02] <veverak> you can either smartly use data around surroundings, have pressure sensor on tip of leg, have joint load information
[19:24:18] <veverak> (tried to think about all three possibilities)
[19:24:25] <veverak> but, I wonder if I am not missing
[19:24:34] <veverak> (not counting IMU on body of robot)
[19:24:57] <z64555> can use force feedback on the joint closest to the body that provides verticle support
[19:25:17] <veverak> joint load feedback is nice in general
[19:25:19] <z64555> which, is basically sensing servo load
[19:25:20] <veverak> or force feedback
[19:25:23] <veverak> yeah
[19:25:36] <veverak> z64555: you can also tell if that leg is standing on something that is rigid enough
[19:25:52] <veverak> something like "don't lift another leg untill load on this one is OK"
[19:26:07] <rue_house> \did you kow you dont have to modify a servo to sense load?
[19:26:17] <veverak> rue_house: yeah, and like the idea
[19:26:20] <rue_house> I told everyone about it, nobody listened
[19:26:26] <rue_house> oh, cool
[19:26:28] <veverak> z64555: also, with IMU on body, you can detect slippery surface
[19:26:49] <rue_house> part of the problem is the backdrive friction on the servos
[19:26:54] <z64555> rue_house: no, you think nobody listened because nobody fawned over you because of your brilliant discovery :P
[19:27:25] <rue_house> ymeh, I'm used to warning people about holes they insist on walking into anyhow
[19:27:40] <veverak> well
[19:27:44] <z64555> but it's so nice in the quicksand
[19:27:48] <z64555> they have a mini bar!
[19:27:54] <veverak> may thing about load detection
[19:27:57] <veverak> *main
[19:28:06] <rue_house> there was a point I just gave up and started softly speaking the warnings for sake of having atleast said something
[19:28:28] <veverak> it's easier in terms of change to leg construction
[19:28:32] <veverak> "no change"
[19:28:35] <veverak> :)
[19:28:37] <rue_house> the pulse length will definitly provide load dtection
[19:29:06] <rue_house> I'd like to know the approximite gains on load vs pulse time
[19:29:13] * veverak doesn't look forward to installing pressure sensor on tip of each leg for example
[19:29:30] <rue_house> no point when you can do it with just a transistor
[19:29:34] <rue_house> and resistor
[19:29:38] <veverak> rue_house: because of things such as this I need to explore how to teach robot to learn these thresholds and values
[19:29:40] <veverak> exactly
[19:29:42] <veverak> :)
[19:30:00] <rue_house> I should play more with that, work out what the board draws when the motors not running, I susp[ect is a fraction of a ma
[19:30:30] <veverak> rue_house: it needs to detect something from values it receives, in simulated enviroment, I can tell it "now it's not under load, now load starts, now load ends"
[19:30:33] <veverak> with that
[19:30:53] <veverak> it should by able to learn how to detect those states in "wild enviroment"
[19:30:55] <veverak> hmm
[19:31:19] <rue_house> kg-cm/us on the pulse time
[19:31:25] <rue_house> I'm gonna sleep then play with it
[19:32:10] <veverak> and teaching things over one variable should be .... doable
[19:32:13] <veverak> nah, tomorrow, gn
[19:43:44] <anonnumberanon> theBear, I don't know if you like space. Can't tell if you would like this video. I find it very inspiring.
[19:48:48] <anonnumberanon> SpaceX Interplanetary Transport System
[19:49:22] <Snert_> SXITI
[19:50:45] <Snert_> dang no good acronym for that.
[19:50:49] <bkboggy> Would this be the right channel to discuss kinematics, etc?
[19:51:47] <Jak_o_Shadows> yes
[19:52:01] <Jak_o_Shadows> Hmm. ##physiccs and ##maths may also be of some help.
[19:52:04] <Jak_o_Shadows> but in general, yes
[19:52:40] <bkboggy> Jak_o_Shadows, yeah, already a regular on those, just wanted something more specific (taking a robotics class right now).
[19:53:58] <Jak_o_Shadows> Well, I would be interested at least
[19:54:10] <Jak_o_Shadows> Maybe in a few hours thoough, my net is going to be spotty for a little bit
[19:55:06] <bkboggy> Oh, no worries. I probably won't have questions at this time. Just wanted to locate the right channel.
[19:56:54] <bkboggy> Actually, I might have a question.... why is it that the angle measurements are always from the new frame to the reference frame. So, if NO is the reference frame and XY is the new frame, why is that the angle (as an example) is measured from X to N and not from N to X?
[19:57:22] <bkboggy> I would think that the angles are measurement in the direction of transformation.
[19:58:17] <Jak_o_Shadows> I am not formally trained in this area, but I wanna say convention.
[19:58:39] <Jak_o_Shadows> and potentially it impacts how you apply your rotation matricies/transform matricies together.
[19:58:45] <bkboggy> Well, that's pretty much what the professor said, but I am the type of person that can't rest until I find out the why.
[19:58:48] <Jak_o_Shadows> It may effect the order of the multiplication
[19:59:08] <bkboggy> Doesn't affect the order, from what I've seen.
[20:00:30] <bkboggy> I'm sure I'll figure it out. Going to go read some more.
[20:01:13] <anonnumberanon> bkboggy, then you should stop breathing until you fully understand how your nasal cells function at the DNA level and deeper possibly.
[20:02:01] <bkboggy> anonnumberanon, not a subject I'm interested in.
[20:02:19] <bkboggy> anonnumberanon, what I've said applies to a subject I'm working on.
[20:02:54] <Jak_o_Shadows> It may also be more intuitive when you're converting to other rotation systems like quaternions or axis-angles, or fixed angles
[20:03:08] <anonnumberanon> bkboggy, Yeah I'm pulling your leg, fam. So have you calculated any kinematics yet or are you just going through your first classes in college for it?
[20:03:25] <bkboggy> anonnumberanon, besides, why would I stop breathing even if it was the subject I was interested in and didn't know all the ins and outs? I didn't say I wouldn't do transformations until I know all the whys. I just said I want to know them.
[20:03:33] <anonnumberanon> Taking an under actuated robotics class or something?
[20:03:53] <bkboggy> anonnumberanon, that was our third session.
[20:04:02] <bkboggy> anonnumberanon, we're doing theory of applied robotics.
[20:04:19] <bkboggy> Right now we're on forward kinematics.
[20:05:28] <bkboggy> Jak_o_Shadows, hmm... yeah, I figured it might be a good idea to just see if it'll make sense a bit later. I've noticed that a few foundational things in many subjects sometimes don't make sense right away but might cause an eureka moment down the road (I just hope it won't be too long until that happens, lol).
[20:05:55] <Jak_o_Shadows> Yeah.
[20:06:09] <Jak_o_Shadows> Did you have a subject on stress? How'd you find that? Did you use tensors?
[20:06:24] <bkboggy> No, not yet.
[20:06:36] <Jak_o_Shadows> Enjjoy!
[20:06:38] <bkboggy> :)
[20:06:39] <bkboggy> We'
[20:07:04] <bkboggy> We covered translation, rotation in 2d space and just started the 3d space.
[20:08:17] <anonnumberanon> bkboggy, this is stuff one of our users has written about kinematics:
https://tote.readthedocs.io/en/latest/ik.html
[20:09:00] <bkboggy> anonnumberanon, thanks! :)
[20:10:33] <Jak_o_Shadows> I wrote:
http://jak-o-shadows.github.io/python/robot/armik.html and
http://jak-o-shadows.github.io/electronics/stewart-gough/stewart-gough.html some years ago.
[20:11:33] <Jak_o_Shadows> Not that I'll claim either is very good, I'm not really strict enough on the coordinate systems
[20:12:03] <bkboggy> Jak_o_Shadows, looks neat, is that platform for a 3d printer?
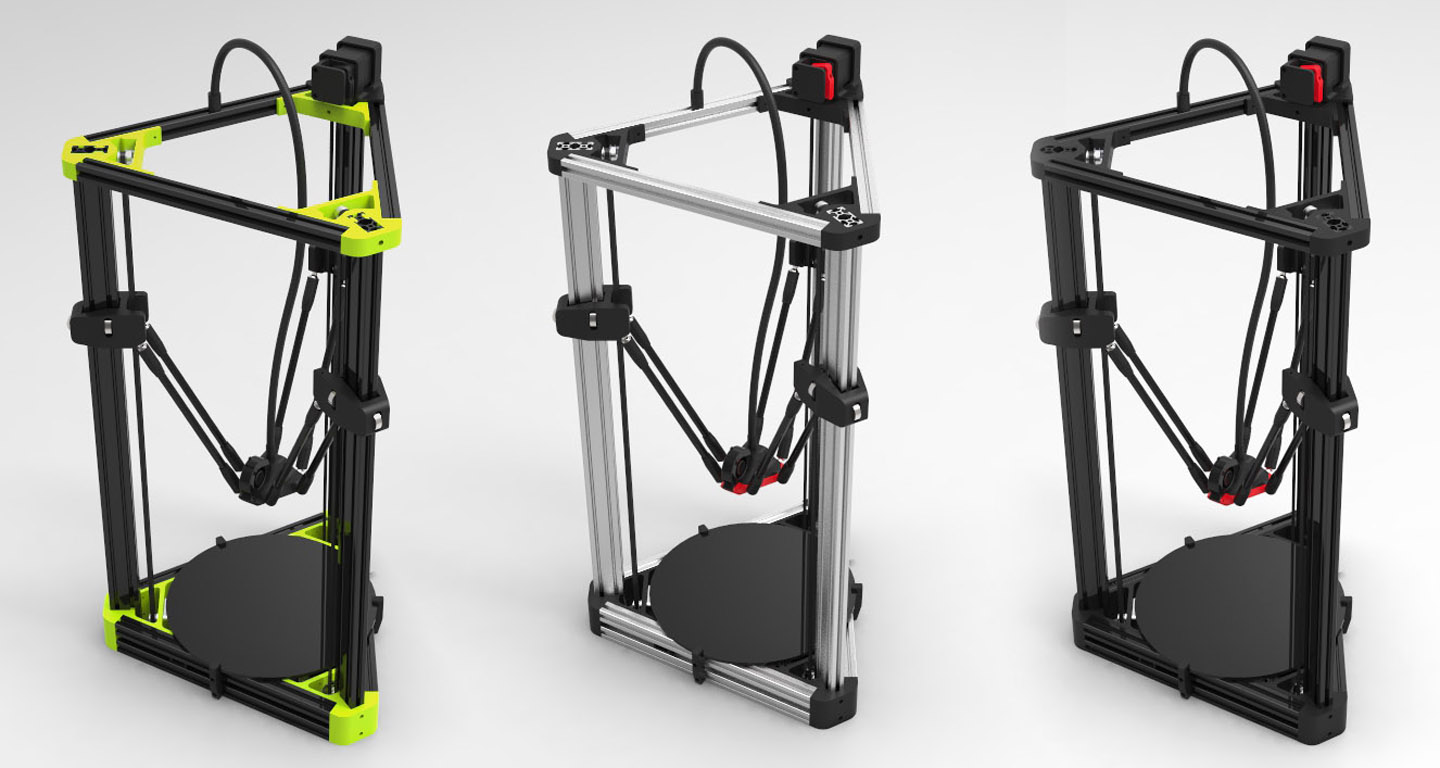
[20:25:51] <Jak_o_Shadows> Nope. 3D printers are (sometimes) delta robots, so they only have 3DOF
[20:25:59] <Jak_o_Shadows> the stewart platform has the full 6
[20:26:31] <Jak_o_Shadows> You could totally do some really cool stuff with a 6DOF 3d printer, but the software is not there to support it
[20:42:55] <z64555> wait what. 6dof printer
[20:44:03] <z64555> You'll have trouble with the last 2 rotations unless you have strong adhesion to the table
[20:44:17] <Jak_o_Shadows> But overhangs and stuff would be clever, at the least
[20:44:54] <z64555> true
[20:46:16] <bkboggy> Jak_o_Shadows, this is sort of what I was thinking of when I saw the second link with the video:
http://static.squarespace.com/static/5218ef36e4b0564f9832daf6/t/525ac027e4b0e9bbe4c7cab0/1378653164056/3.jpg?format=1500w
[20:46:42] <Jak_o_Shadows> Oh yeah, absolutely
[20:50:53] <rue_shop5> WOW THIS IS REALLY COOL
[20:51:05] <rue_shop5> no pulse under no load
[20:51:17] <rue_shop5> a tiny bit of force, the drive pulse is about 1ms
[20:51:29] <rue_shop5> at, what I'm sure is more than 100% load, about 9ms
[20:53:44] <rue_shop5> ambient draw is down in the 10mA range,
[20:53:56] <rue_shop5> the drive pulse on the motor is about 600-700mA
[20:54:21] <rue_shop5> so YES, you can COMPLETELY measure force on a servo without modifying it
[20:54:29] <rue_shop5> I'm giong to make up a detector schematic
[21:11:08] <rue_shop5> wow thats sensitive, I thought it would be much curder
[21:27:52] <rue_shop5> I MADE YOU A VIDEO
[21:27:57] <rue_shop5> I dont usually do that
[22:22:28] <SpeedEvil> As long as it doesn't hit the stops, and sticktion is not in play
[22:22:37] <SpeedEvil> and you don't know which way the force is
[22:30:19] <rue_house> geez, wait for the video eh?
[22:37:17] <SpeedEvil> Why?
[22:37:31] <rue_house> casue I said that... its uplaoded and processing
[22:37:32] <SpeedEvil> Torque is proportional to current (to a first order)
[22:37:52] <SpeedEvil> I don't see why it's surprising that a servos current and torque are related.
[22:38:12] <rue_house> then why am I the only person whos said it so far?
[22:38:14] <rue_house> EVER
[22:38:22] <rue_house> https://youtu.be/UrSCZZBHXrY
[22:38:40] <SpeedEvil> It's a widely known technique - perhaps not commonly on RC servos
[22:38:49] <SpeedEvil> damn near every power lock uses it
[22:41:15] <rue_house> ?
[22:42:54] <SpeedEvil> car central locking
[22:43:04] <SpeedEvil> stall current switches the motor driver off
[22:43:32] <Jak_o_Shadows> Still, it is handy.
[22:44:42] <SpeedEvil> very
[22:48:04] <rue_house> WTF did it cut off my video?
[22:48:39] <rue_house> tell me if that cut off on you!?
[22:49:22] <Jak_o_Shadows> Haven't watched it all yet. Fighting with my internet
[22:49:37] <rue_house> it did, damnit
[22:52:32] <rue_house> damn damn damn
[22:54:25] <rue_house> damnit, I'm gonna have to upload the 1G raw file, damn
[22:57:35] <rue_house> ok thats gonna kill my monthly bandwidth and take a half hour
[22:57:44] <rue_house> why do I do this for the world,
[22:58:11] <rue_house> I dont know I even get a thanks back, hum
[22:58:29] <rue_house> ok, I ahve to shut down the shop and work out what to have for supper
[22:59:44] <rue_house> I suppose the root of what i do, I do for me
[22:59:56] <rue_house> I really want to be part of a team
[23:00:08] <rue_house> I never am, sometimes I pretend
[23:02:58] <rue_house> oh and I locked up the browser at 25%
[23:04:09] <rue_house> I dont want to eat anything
[23:04:17] <rue_house> I'm really done with eating
[23:06:43] <Jak_o_Shadows> rue, is there such a thing as a DIP chip that contains a bunch of transistors? So you could have that circuit for all your servos, and much neater board?
[23:07:18] <rue_house> yes
[23:07:33] <rue_house> 4 per chip iirc
[23:07:54] <rue_house> you cant use drivers like the uln2003 beacsue they ahve internal resistors on the base
[23:08:35] <rue_house> I'm uploading the complete video
[23:09:00] <Jak_o_Shadows> The output signal - it's a nice clean logic level pulse?
[23:09:55] <rue_house> yup
[23:10:06] <rue_house> mmpq2222
[23:10:31] <Jak_o_Shadows> Might have to give it a go in a few months
[23:10:34] <rue_house> the base emitter only drops about 0.2V, so there isn't much effect on the servos
[23:13:58] <rue_house> there is also a mmpq3906, but its more expensive
[23:14:58] <rue_house> ya know, the forward votlage drop on a 1n4004 is prolly enough that an avr would see it as a high
[23:15:09] <rue_house> you would still have the shunt resistor
[23:15:32] <rue_house> 10mA / 700mA is a nice big differece thats easy to detect
[23:16:51] <rue_house> you could mux the servos into the controller with a CD4051, or even a
[23:18:45] <rue_shop5> 74ls151
[23:20:52] <rue_shop5> i you were clever you could use a 74ls165
[23:27:52] <rue_house> oo your right
[23:33:12] <rue_house> https://youtu.be/WMJKUS0BqGo
{kind=link}
{kind=link}