Back
[00:11:46] <rue_house> hey ooo
[00:11:49] <rue_house> hey cooo
[00:11:52] <rue_house> llll\
[00:12:29] <rue_house> maybe thats what I should do for the mecha
[00:13:25] <Jak_o_Shadows1> I think the spine is very important.
[00:14:04] <Jak_o_Shadows1> On the other hand, stewart platforms are perhaps not betst known for their speed of response.
[00:14:17] <Jak_o_Shadows1> and I dunno, I sorta feel like you kind really need 2 to do it properly
[00:17:17] <Jak_o_Shadows1> I think with rotary ones, you don't want the motors where everybody puts them.
[00:17:49] <Jak_o_Shadows1> If you put them mid-link - not fixed to either end of the plate - you get a better range of motion & possibly faster.
[00:18:01] <Jak_o_Shadows1> At the very least, forward kinematics are possible in that system.
[00:40:42] <rue_shop4> so today I realized that I should take the pressure sensors that I have (got free, but cant afford to buy) and make that counteractuated air muscle demo
[00:40:55] <rue_shop4> casue, the sensors dont matter to prove the design
[00:41:07] <rue_shop4> its more important to know the alg works
[00:41:28] <rue_shop4> and with that I just leanred about over-the-wire force feedback, I'm ready to go
[00:41:54] <Jak_o_Shadows1> and achieving things in video is nice for us fans
[00:43:02] <rue_shop4> yar, like I say, the actual machine needs to use cheap sensors, but I have enough good ones to write the code and make the test machine
[00:43:56] <Jak_o_Shadows1> Test early, test often
[00:45:45] <Jak_o_Shadows1> https://i.imgur.com/IlR5KwC.gifv is actually a good example of how the spine does stuff when running
[00:47:58] <rue_shop4> damnit, I need to find baloons that dont just rot
[00:59:26] <rue_shop4> ok
[00:59:27] <rue_shop4> so
[00:59:32] <rue_shop4> lets ball park 15psi
[00:59:42] <rue_shop4> 100 kpa
[01:02:11] <rue_shop4> I have the tire pressure sensors, and amplifiers for them, but...
[01:04:58] <rue_shop4> this one is 20psi...
[01:44:28] <rue_shop4> ok good news and bad
[01:44:35] <Jak_o_Shadows1> Mmm?
[01:44:41] <rue_shop4> good: I'm holding two 100kpa pressure sensors in my hand
[01:45:00] <rue_shop4> bad: I need two instrumentation amplifiers to operate them
[01:45:57] * rue_shop4 thinks
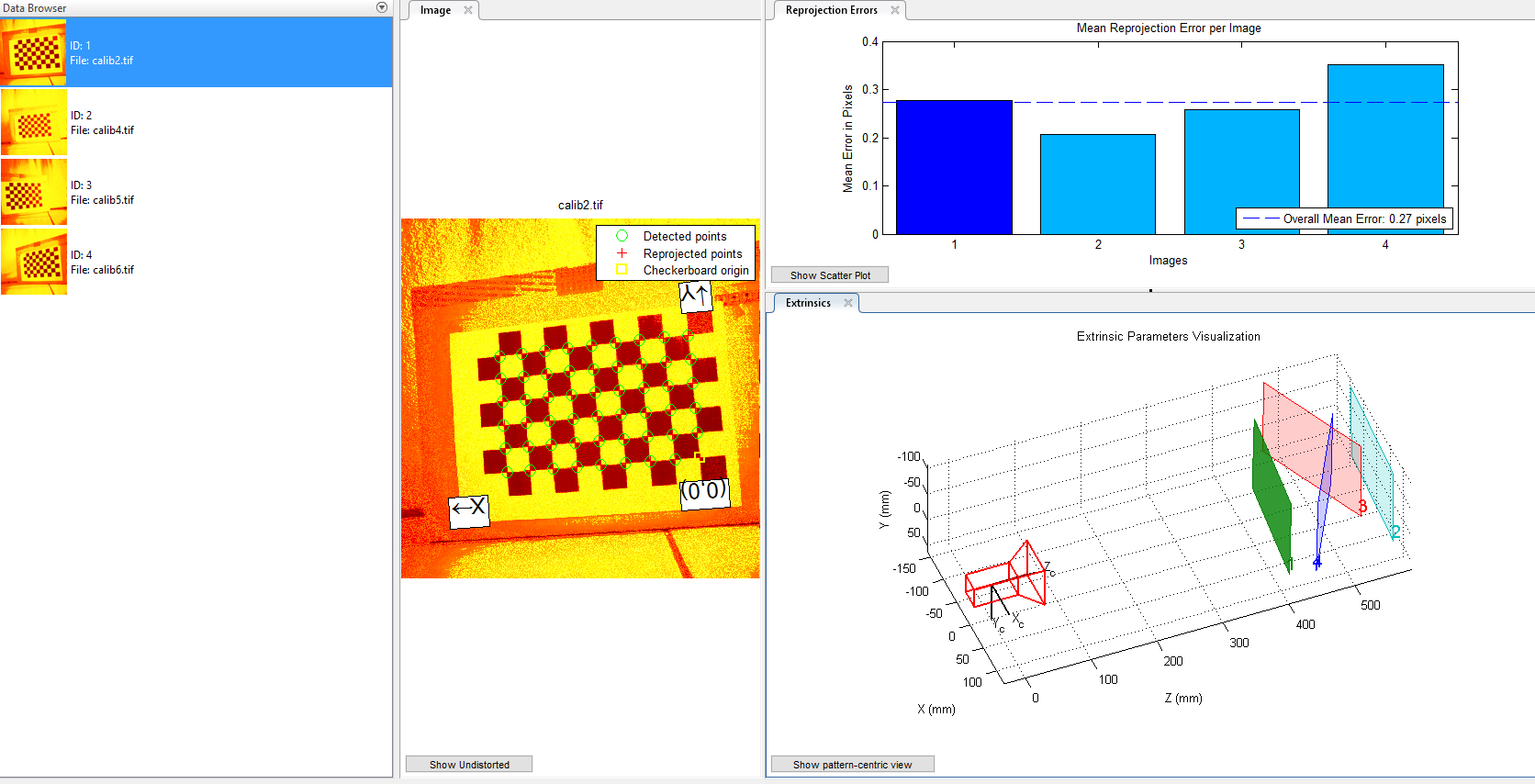
[01:48:03] <Jak_o_Shadows1> Matlab camera calibration is cool
http://jak-o-shadows.github.io/picturedump/matlabCameraCalibrationMt9m001.PNG
[01:49:22] <rue_shop4> I dont need simulations with cameras....
[01:49:32] <rue_shop4> need to think this out
[02:00:51] <rue_shop4> arg, too much supper for me
[02:01:20] <Jak_o_Shadows1> Hmm. 156 degree FOV. Do not want.
[02:24:49] <rue_shop4> hmm I need a generic controller for a current controlled dc motor driver
[02:25:13] <rue_shop4> all I need is a universal current for DC motors
[02:25:18] <rue_shop4> and voltage
[02:26:09] <rue_shop4> 40mV full scale
[02:26:11] <rue_shop4> geez people
[02:26:32] <rue_shop4> so +- .02V
[02:26:43] <rue_shop4> I want +- 2V
[02:26:50] <rue_shop4> so 100x gain
[02:31:19] <rue_shop4> whats 5% of 1M
[02:31:38] <rue_shop4> 50k
[02:31:40] <rue_shop4> ouch
[03:21:53] <rue_shop4> *facepalm*
[03:22:22] <rue_shop4> a voice in my head says, "hey the signal on the pressure sensor is proportionate to the force on the air cylinder!"
[03:23:19] <rue_shop4> well, the centering is out,
[03:23:25] <rue_shop4> but its working
[03:23:49] <Jak_o_Shadows1> Rue, what do you think of servo extender things like :
http://www.ebay.com.au/itm/PCA9685-16-Channel-12-bit-PWM-Servo-motor-Driver-I2C-Module-Robot-M96-/182272142055?hash=item2a70442ae7:g:jcYAAOSwT4lWRqeS
[03:24:05] <Jak_o_Shadows1> I know I could do it by myself, but $3 seems like it's not worth the time to.
[03:24:49] <rue_shop4> its crap, like 5 or 6 bits of resolution by the time your there
[03:24:57] <rue_shop4> use the damn m238 source I wrote
[03:25:18] <rue_shop4> spend $2 on a m328 board and load my source
[03:25:30] <rue_shop4> 8 channel at like 12 bit
[03:25:39] <rue_shop4> STABLE TIMING
[03:26:06] <rue_shop4> I need a rail to rail amp, or a -V for the amplifiers
[03:26:36] <Jak_o_Shadows1> Damn. It's just htat the physical board is nice.
[03:26:53] <rue_shop4> use any m328 board
[03:27:33] <rue_shop4> why dont you write a 1 bit servo controller
[03:27:42] <rue_shop4> at 1 bit, you can run as many channels as you want
[03:28:15] <rue_shop4> even the freaking tlc5940 will get closer than that
[03:28:32] <rue_shop4> you get 7 bits by the time its done with all 12
[03:29:22] <Jak_o_Shadows1> Which is bad for servos
[03:29:31] <Jak_o_Shadows1> I might buy one and use it to control lights :D
[03:34:45] <rue_shop4> I wrote the code for a reason
[03:35:06] <rue_shop4> I wanted stable servo pulses with the highest resolution that was obtainable
[03:35:08] <Jak_o_Shadows1> Yeah. I was just hoping to avoid messy wiring.
[03:35:54] <rue_shop4> m328 with 8 servo off it?
[03:36:14] <Jak_o_Shadows1> I feel confident I could make a mess.
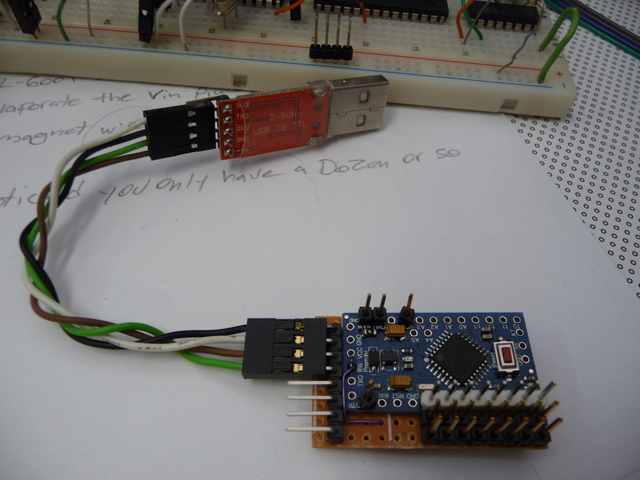
[03:56:54] <rue_shop4> you saw my board, right?
[03:57:23] <rue_shop4> http://ruemohr.org/~ircjunk/robots/arm8/p1060720.jpg
[03:57:25] <rue_shop4> not that one
[03:58:58] <rue_shop4> ... odd
[04:00:21] <rue_house> 1080339
[04:01:46] <rue_house> uploaded...
[04:02:19] <rue_house> http://ruemohr.org/~ircjunk/robots/arm9/p1080399.jpg
[04:02:29] <rue_house> how the hell did 2 years go by since I made that bot, damnit
[04:02:52] <rue_house> Jak_o_Shadows1, ^
[04:04:13] <rue_house> there are 'so many' pins because I doubled up on the + and - for the servos, then did seperate + and - for the microcontroller, then the TX and RX
[04:06:22] <Jak_o_Shadows1> No, haven't seen that before
[04:06:33] <Jak_o_Shadows1> That's waaaay neater than I expected
[04:06:40] <Jak_o_Shadows1> and the double board type thing - that's really clever
[04:16:54] <rue_shop4> :P
[04:17:46] <rue_shop4> I just ripped the idea off the other guy who made the other boards
[04:50:23] <rue_shop4> hahahah
[04:50:32] <rue_shop4> how long have I been working on this pressure sensor now
[04:50:44] <rue_shop4> casue, its +- 15 psi
[04:50:52] <rue_shop4> and I been working hard to make sure I get the whole range
[04:50:57] <rue_shop4> I only need 0-15 psi
[04:50:58] <rue_shop4> hahaha
[04:55:36] <rue_shop4> ok, NOW the scale works
[04:56:13] <rue_shop4> sometimes its not maths fault it cant model stuff worth *&%&$
[04:58:48] <rue_shop4> hah, I can get 25 psi from this sucker
[06:05:31] <rue_house> I once worried that I'm too much in the habbit of building circuits on protoboard when I have the facilites to etch pcb's for them, but in reality its often justified, lots of my projects use baords that are one-offs with one-off available parts (recycled), there really is no pont in going to the troubel of designeing and building acustom pcb for them
[06:06:02] <rue_house> that last board I did was reasonable cause it uses smt parts, and I want 16 of them
[06:06:25] <rue_house> this digital pressure transducer board has no reason to be etched
[06:06:45] <rue_house> I have more pressure transducers, but I'm more likley to use them in different ways
[06:07:22] <Jak_o_Shadows> I can't find a source for CHEAP protoboard
[06:08:07] <Snert> ali and ebay for protoboard.
[06:08:27] <rue_house> er yea
[06:08:41] <rue_house> like $10 gets you like 50 5x7 boards
[06:08:56] <rue_house> unless your silly and insisting on fiberglass ones
[06:09:03] <Snert> I spent 20bucks once, and got about every size and hole pattern I could find.
[06:09:40] <Jak_o_Shadows> Is that 5x7 inches or cm?
[06:09:49] <Jak_o_Shadows> also, maybe I failed at looking last time
[06:09:54] <rue_house> do you think china is imperial or metric?
[06:10:07] <rue_house> (hint: only the usa uses imperial now)
[06:10:20] <Jak_o_Shadows> very good point
[06:12:19] <rue_house> sorry I dont mean to be grouchy
[06:12:26] <Jak_o_Shadows> nah, no worries
[06:12:56] <rue_house> if your not buying it from china, the guy charging your 10x markup is
[06:14:00] <rue_house> I was watching a youtube vid last week about how to buy things from aliexpress, 'brand' them, and sell them for 5x to 20x what you bought them for on ebay
[06:15:16] <rue_house> he said often the custom branding can be done for you by the manuf for about 20c/100pcs
[10:51:35] <ace4016> look at this walking robot go!
https://streamable.com/nw37
[12:04:25] <rue_house> ah yes
[12:04:45] <rue_house> thats the windeless version
[12:05:39] <rue_house> and some people think walking is this incredibly complex thing
[12:10:05] <rue_house> heheh
[12:11:12] <rue_house> "quadroped gait based on the stride of a ladder down an inclined slope."
[12:15:03] <veverak> lol
[12:15:06] <veverak> sounds like thesis
[12:15:08] <veverak> :)
[12:17:49] <ace4016> lol
[12:21:49] <rue_shop4> are you kidding, you need to do a foot-force chart, moment of inertia analysis and slow motion breakdown
[12:22:20] <rue_shop4> dear god, how long I been asleep?
[12:22:28] <rue_shop4> its 10am now, I was down at 4am
[12:22:31] <rue_shop4> thats uh
[12:22:34] <rue_shop4> 6?
[12:22:48] <rue_shop4> that battery still isn't charged, must be shot
[13:54:45] <SpeedEvil> Walking is this incredibly complex thing, if you don't have a mechanism tuned to place the feet where they need to go
[13:55:03] <veverak> "where they need to go"
[13:55:06] <veverak> good question
[13:55:08] <veverak> ;)
[13:55:10] <veverak> :D
[13:55:41] <SpeedEvil> https://www.youtube.com/watch?v=pgaEE27nsQw
[13:55:48] <SpeedEvil> Flexible Muscle-Based Locomotion for Bipedal Creatures
[13:56:11] <SpeedEvil> Optimising both gait, and muscle attach points
[13:57:27] <rue_shop4> ok I finally broke down and did it, I started a custom datasheet book
[13:57:38] <rue_shop4> I'm getting tired of printing out the same datasheets over and over
[14:01:03] <veverak> :D
[14:02:45] <rue_shop4> the old NTE book is great, but dosn't have 1/3 of the parts I use in it anymore
[14:11:31] <rue_shop4> I suppose while I'm making parts for this, I should make up the 60V solinoid driver, the mecha will need.... lets see, each controller is 8 channel, each channel is 4 solinoids, so 32 solinoids per controller
[14:11:43] <rue_shop4> and the mecha has something like 94 axies...
[14:12:03] <rue_shop4> so I could just make up 12 of those and I'd be good
[14:12:41] <rue_shop4> no, the mecha is 47 axis
[14:12:53] <rue_shop4> so, 6 boards
[14:12:54] <SpeedEvil> how many watt?
[14:13:03] <rue_shop4> axis'
[14:13:13] <SpeedEvil> watts
[14:13:22] <rue_shop4> left elbow, right elbow
[14:13:25] <rue_shop4> you know, axies'
[14:13:36] <rue_shop4> oh, each solidoid?
[14:13:39] <rue_shop4> its low
[14:13:46] <rue_shop4> washing machine solinoids
[14:13:50] <SpeedEvil> No, I mean total
[14:13:56] <rue_shop4> no idea
[14:14:00] <SpeedEvil> and mechanical output watts
[14:14:21] <rue_shop4> oh, I'm gonna use a 5Hp compressor, I recon that should do it
[14:34:05] <rue_shop4> its not a battle bot, its a utility bot, the fact its pneumatic should allow it to push over 5hp for short periods
[16:30:05] <precognist> Hello all. Hope everyone is having a great day.
[16:30:08] <precognist> :D
[16:30:20] <precognist> I need to build a 3phase BLDC controller that communicates over i2c.
[16:32:16] <ace4016> how far have you gotten so far?
[16:32:47] <SpeedEvil> precognist: you do know they exist?
[16:33:31] <precognist> Yes, ive found a few articles about them.
http://hackaday.com/2016/07/29/3-phase-bldc-motor-controller-will-run-you-20-in-parts/ is an example.
[16:34:20] <SpeedEvil> I was meaning standard brushless ESCs, reflashed
[16:35:16] <precognist> Hmm. No. The ESC's i currently have are for high rpm/low torque, non programmable.
[16:35:36] <precognist> Did not think of that. Good suggestion.
[16:35:55] <precognist> They are a little large as well.
[16:36:21] <precognist> was hoping there was a module out there already made, but no dice on search.
[16:38:19] <precognist> I need a woz
[16:38:53] <precognist> (hopes that's not street slang for something)
[17:30:44] <Snert> What's a woz? Besides a flavor of Steve.
[18:00:02] <peepsalot> oh precog left
[18:00:08] <peepsalot> was gonna link this
http://vedder.se/2015/01/vesc-open-source-esc/
[18:00:45] <peepsalot> that thing has all the ports
[19:16:15] <glitch0matick> hello
[19:27:31] <veverak> nah
[19:27:36] <veverak> again C++
[19:27:45] <veverak> again feeling like magician more than programmer
[19:33:47] <Tom_itx> u do the voodoo that u do
[19:34:41] <Snert> hoodoo that voodoo?
[19:39:50] <veverak> https://www.youtube.com/watch?v=yZAY-78zhmw and this! :)
{kind=link}
{kind=link}
{kind=link}