Back
[00:00:06] <rue_shop3> well, I'm bummed out that I missed you , even if it was 4am
[00:00:57] <The_Jester> I considered wakuing you up but it was 4am so..
[00:01:10] <rue_shop3> I can understand, but arg :)
[00:02:25] <The_Jester> Im bummed i still down haave a PS for my servos, Guessing i will have to pull a 7805 fro, something, although i dont exactly understand why this POS right nere is nerfed
[00:02:52] <The_Jester> but that said i would still be short by 1200Ma
[00:03:16] <rue_shop3> maybe I'll go to extra tommorow and bring you a new reg
[00:03:27] <rue_shop3> did you power up that one you have?
[00:04:07] <rue_shop3> http://image.wikifoundry.com/image/1/rdysqVtdYiCJqeiYDeqNPA74188/GW471H275
[00:04:16] <The_Jester> not as of yet, I appearently dont own any aligator clip leads anymore so i have to solder leads onto the input
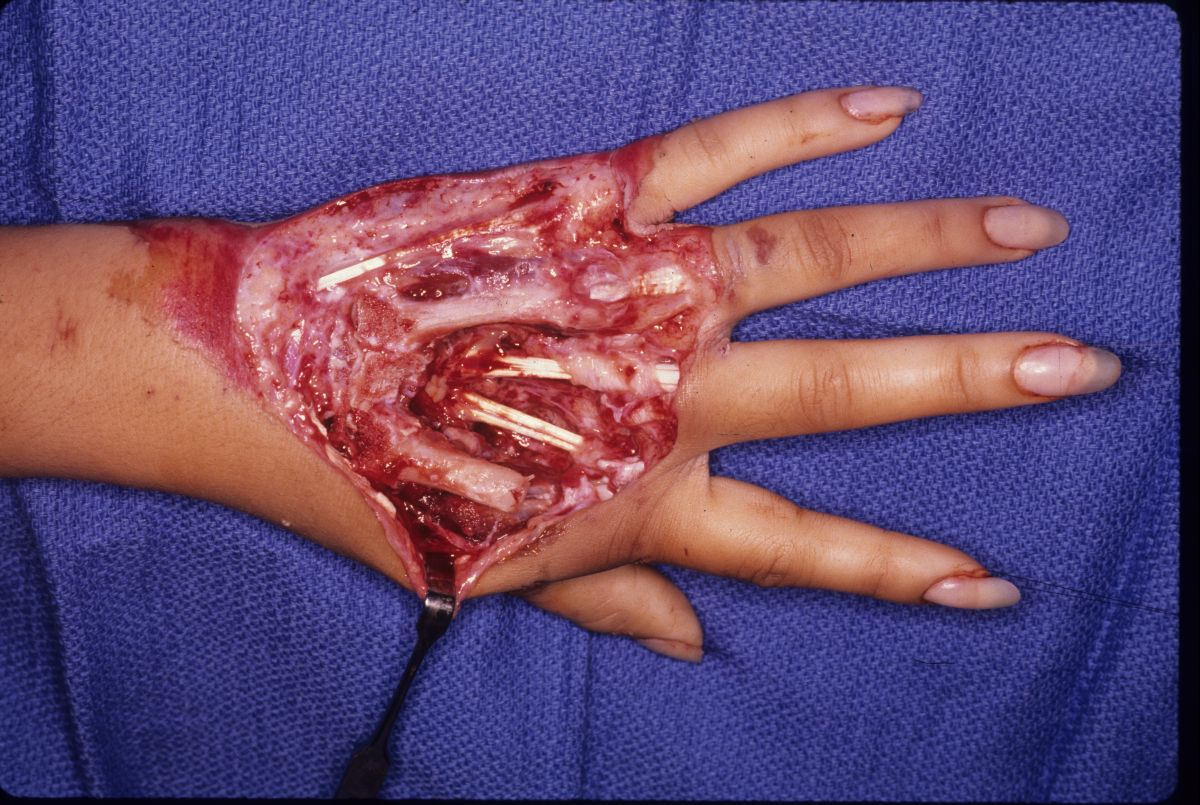
[00:04:18] <rue_shop3> I dont get why that one tendon does a loop thru
[00:04:28] <rue_shop3> yea whatever
[00:04:38] <rue_shop3> its gonnaa get soldered to anyhow
[00:04:46] <rue_shop3> not like your gonna blow a warranty
[00:05:06] <The_Jester> how does the top work?
[00:05:19] <rue_shop3> its just one freaking tendon right across
[00:05:24] <rue_shop3> *surprise*
[00:05:40] <rue_shop3> you have no un-curl control
[00:05:50] <rue_shop3> human hands are designed for grabbing, not ungrabbing
[00:06:07] <The_Jester> like an aligators mouth
[00:06:13] <rue_shop3> heh
[00:06:21] <rue_shop3> they can gag you know
[00:06:29] <The_Jester> interesting shortcut
[00:06:32] <rue_shop3> if you are trapped, go for a gag reflex
[00:07:11] <The_Jester> but if you consider tree climbing machines its all about gripping
[00:07:25] <rue_shop3> claws?
[00:07:32] <rue_shop3> the claws do all the work
[00:07:48] <The_Jester> like a sloth?, not on my hands
[00:08:03] <The_Jester> could you amagine what keyboards would look like?
[00:08:17] <rue_shop3> hehe
[00:09:19] <The_Jester> so this leads back to what i was saying about a 3 clawed manipulator, I was wondering if i should worry about opening force
[00:10:48] <rue_house> na I have the number
[00:10:49] <rue_house> s
[00:10:54] <The_Jester> http://www.eatonhand.com/jpg/1200_1685903.jpg white is tendon i assume
[00:11:36] <rue_house> opening force is 2.5kg over 210mm
[00:11:45] <rue_house> ffffffffff ickgh
[00:12:33] <rue_house> there are two different closing numbers,
[00:13:21] <The_Jester> yes its not pretty but we all have to same mechanics, we justy dont see it so it isnt really eww, we just arnt used to seeing it, clearly that hand is in a hospital.. If it was torn off and laying in the street it would be eww.
[00:14:07] <The_Jester> gives you a good idea of what your dealing with anyway
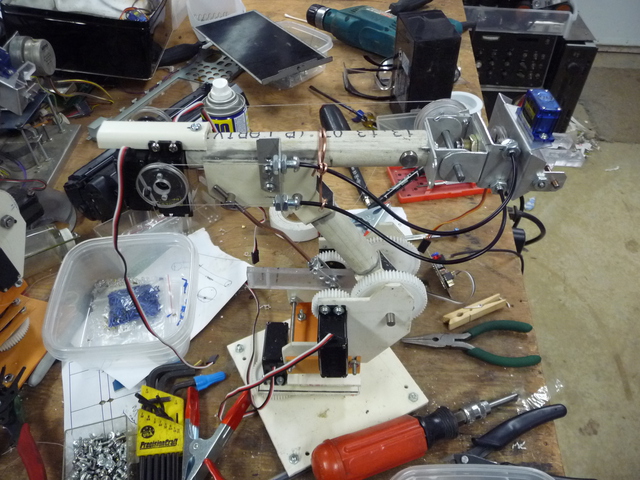
[00:17:02] <rue_house> http://ruemohr.org/~ircjunk/robots/sparrow1/p1080426.jpg
[00:17:28] <rue_house> I think its rated for 1200lbs
[00:17:36] <rue_house> (not th ornage stuff)
[00:18:53] <The_Jester> why not cable
[00:19:23] <The_Jester> your forgetting to intigrate tendon sheilthes (natures pushrod tube)
[00:19:46] <rue_house> at some point I worked out that stuff is better
[00:20:02] <rue_house> I might be wrong, dunno
[00:20:09] <rue_house> its basically free
[00:20:24] <rue_house> and WAY stronger than stainless cable
[00:20:28] <The_Jester> I guess its just a demonstrator
[00:21:00] <rue_house> its all experimental at thispoint
[00:21:17] <rue_house> I still need to get the counteracting air muscle working
[00:21:34] <rue_house> tho this 3 tendon thing throws an extra hoop into it
[00:22:00] <rue_house> it turns out, that with 3 fingers, one dosn't need to move from side to side! :)
[00:22:05] <rue_house> that saves work
[00:22:15] <The_Jester> why do you need the counteracting muscle for that?
[00:23:33] <The_Jester> if you have a tendon along he top to open that is your counteracting action and you release lower tendons to control which join it acts against
[00:23:51] <rue_shop3> kinda yea
[00:24:16] <rue_shop3> remember that thread thing hanging from the cieling?
[00:24:24] <rue_shop3> its about that
[00:24:46] <rue_shop3> nature doing 4 to 3 actuator conversion
[00:25:57] <The_Jester> okay yea, but those hands ar not going to be writing or soldering so presision isnt such a big deal, you could do 12' robot chores witha grapple
[00:26:24] <rue_shop3> mmmmm
[00:26:33] <rue_shop3> I think you would be surprised
[00:27:15] <rue_shop3> a 300lb output axis will have about a 0.2lb resolution
[00:30:24] <rue_shop3> (the machines expected bench-press is 300lbs)
[00:31:57] <The_Jester> http://www.bruntonengineering.co.nz/wp-content/uploads/2011/10/contractors2.jpg
[00:32:11] <The_Jester> quich changew apator = awsomeness
[00:33:11] <The_Jester> i was glooking at this earlier
[00:33:13] <The_Jester> http://cdn.shopify.com/s/files/1/0059/3932/products/3_finger_adaptive_robot_gripper_2.jpg?v=1362335941
[00:33:33] <rue_shop3> I thiknkI saw that a while back
[00:33:37] <rue_shop3> cool mechanism
[00:34:34] <mrdata> i like the look of that
[00:35:04] <rue_shop3> iirc the way they motorize it is interesting too
[00:37:05] <The_Jester> Montreal
[00:37:59] <The_Jester> i wonder if they would be willing to share some engineering drawings
[00:40:26] <justanotheruser> If I want to make a robot arm that allows me to, with high precision, measure the location of each of its joints and fingers and set them with precision, where should I get started? I mostly want to know the hardware side, I assume to accomplish this precision setting I would want to use stepper motors and decide how many rotations have occurred?
[00:43:31] <rue_house> justanotheruser, do you want force feedback?
[00:44:04] <The_Jester> Rue_Mohr is who you want to talk to, ironicly we have been discussing grippers for an hour
[00:44:25] <The_Jester> hacked servos...
[00:44:40] <rue_house> The_Jester, I'm gonna atch sme sleep, then wake up at some ungoly hour, eat and maybe fix that damned dryer
[00:44:50] <The_Jester> if you need compliane thats another issue
[00:44:55] <rue_house> then go back to bed prolly
[00:45:20] <justanotheruser> rue_house: yes, I believe force feedback would be very useful
[00:45:37] <The_Jester> rue: stick around an talk to this guy
[00:45:48] <justanotheruser> who me
[00:45:52] <rue_shop3> justanotheruser, force feedback means dont use steppers
[00:45:54] <The_Jester> u
[00:46:08] <rue_shop3> but steppers are really good for easily tracking position
[00:46:11] <Jak_o_Shadows> I dunno, compliance is probably more useful
[00:46:27] <rue_shop3> then use air muscles ;)
[00:46:34] <Jak_o_Shadows> or elastic elements :D
[00:46:43] * The_Jester *face palm*
[00:46:47] <justanotheruser> rue_shop3: oh I thought ou meant I was getting feedback on the force used by each motor which through some math could be used to determine the force vector on the robot
[00:47:10] <rue_shop3> I'm falling asleep, its best if I take a nap
[00:47:16] <justanotheruser> I assume steppers can be made to be more precise than (I assume you're suggesting gyroscopes0
[00:47:17] <rue_shop3> then I avoid the zombie phase
[00:47:21] <justanotheruser> ok
[00:47:48] <The_Jester> those forces will change, robot will be exerting more force to lift while holding a heavy object than a light one for example
[00:48:04] <justanotheruser> Of course they'll change
[00:49:13] <The_Jester> regardless of what your using I think potentiometers or optical encoders in each join alon with (if your using brushed motors) current sensing.
[00:50:06] <justanotheruser> optical encoders will be more precise right?
[00:50:32] <The_Jester> compliance is a degree of flex in the joints that alows them to rebound, Like the way your fingers bend up past straight our your nee can go back a bit.
[00:51:42] <The_Jester> okay but with optos you need to know where zero is, with a variable resistor you know where you are between max, mix without having to goto )' and count
[00:51:56] <The_Jester> sorry 0'
[00:52:14] <justanotheruser> I do not understand what you mean goto 0
[00:52:31] <justanotheruser> with an "opto" I can just record where zero is every time I move right?
[00:52:48] <rue_house> no you have to go to a zzero position to get your brearings
[00:53:11] <justanotheruser> I don't understand how that prevents it
[00:53:23] <rue_house> from there you track the change in position and know where you are
[00:53:36] <justanotheruser> right, and if I shut down I can just read where I was
[00:53:40] <justanotheruser> hence record where zero is every time
[00:54:00] <rue_house> encoders typically only tell you how far you moved, not where you are
[00:54:20] <rue_house> so at some point you need to find a positon you know, which is typically zero
[00:54:23] <justanotheruser> yes that is why I would record it
[00:54:58] <rue_house> rue_shop3, damnit man, all I'm asking for is a 12V adapter for the bedroom lights!
[00:55:16] <rue_house> justanotheruser, how many robots have you made?
[00:55:35] <The_Jester> amagine a clock is your opto, each tick of the minute hand is 1 step, but in order to know what time it is the hand needs to start at 12 and you need to count the steps. without counting the steps away from 12 you have no idea where the clock hand is, Samwe thing with stepper, you have to start at a known possition and count up/down and there is no way to say "what possition am i now because im not sure or it might be changing"
[00:56:17] <justanotheruser> rue_house: robots? 0
[00:56:24] <justanotheruser> well
[00:56:35] <justanotheruser> I don't know the definition
[00:56:41] <The_Jester> how large is this arm?
[00:56:42] <justanotheruser> I made a car that could pick stuff up with a claw
[00:56:50] <rue_house> ok, you need to be wrong before you will know what right is, so build anything, then build something better based on what you have learned
[00:57:15] <The_Jester> Rue is right, trial an error is the way
[00:57:16] <rue_house> dont wory about what is wrong and what is right
[00:57:27] <justanotheruser> The_Jester: 3 ft fully extended
[00:57:41] <rue_house> sometimes you have more success being severly wrong than most people ever have doing things right
[00:57:49] <justanotheruser> rue_shop3: I don't think my mind works that way
[00:58:03] <rue_house> http://ruemohr.org/~ircjunk/robots/arm5/p1030899.jpg
[00:58:06] <rue_house> about that big?
[00:58:17] <justanotheruser> no context
[00:58:21] <justanotheruser> is that 3 ft?
[00:58:41] <The_Jester> just: mine doesnt eather but unfortunatly thats how the universe designed us and nature so its been proven thats the right way over several hundred million years
[00:58:43] <rue_house> http://ruemohr.org/~ircjunk/robots/arm5/p1030724.jpg
[00:58:45] <justanotheruser> about as big as aan extended humans hand
[00:58:50] <rue_house> no, your right its prolly larger
[00:58:55] <justanotheruser> arm*
[00:59:24] <justanotheruser> the The_Jester whats been proven
[00:59:39] <rue_house> http://ruemohr.org/~ircjunk/robots/arm6/p1070897.jpg
[00:59:42] <rue_house> thats about 3 feet
[00:59:43] <The_Jester> trail and error is the way to design
[00:59:58] <rue_house> I think
[01:00:01] <rue_house> maybe a bit larger
[01:00:12] <justanotheruser> is there a robot arm design kit I can buy so I can learn the first time easily?
[01:00:34] <rue_house> yep,. I can sell ya one for just $3000
[01:00:35] <The_Jester> unless your a creationist in which case I will never be able to sell you on evolutionary desgn principals
[01:00:37] <rue_house> er $300
[01:01:02] <rue_house> http://ruemohr.org/~ircjunk/robots/arm9/p1060859.jpg
[01:01:04] <justanotheruser> link
[01:01:08] <The_Jester> Rue....
[01:01:14] <rue_house> yes?
[01:01:22] <justanotheruser> link
[01:01:26] <rue_house> I'll pay ya $150 to make arm9 printable?
[01:01:28] <justanotheruser> woops, didn't mean to doublepost
[01:01:32] <rue_house> http://ruemohr.org/~ircjunk/robots/arm9/p1060859.jpg
[01:01:41] <rue_house> :D
[01:01:46] <The_Jester> you recall my mention we should be a printable design just for this reason...
[01:01:54] <rue_house> yea yea
[01:02:04] <rue_house> I'm like half way there!
[01:02:17] * justanotheruser is confused
[01:02:22] <rue_house> justanotheruser, I dont ahve a pic with the electronics and stuff
[01:02:24] <The_Jester> I could make arm 9 printable but the gears will be an issue
[01:02:26] <rue_house> just a youtube video
[01:02:38] <The_Jester> link the vid
[01:03:29] <rue_house> https://www.youtube.com/watch?v=slxOrCXxXOg
[01:03:31] <rue_house> hehe
[01:03:32] <The_Jester> just: have you got a picture of what you want your arm to look like, and is this for school or just fun?
[01:03:37] <rue_house> it would be that video...
[01:03:57] <justanotheruser> fun
[01:03:58] <rue_house> yea thats 9
[01:04:16] <justanotheruser> no picture of wat I want it to look like, don't care about the looks as much as I do the criteria I listed
[01:04:38] <Jak_o_Shadows> aha, headphones
[01:04:38] <rue_house> The_Jester, it danced for 10 hours a day, for 2 days and didn't even break
[01:04:55] <rue_house> Jak_o_Shadows, and a micro ipod if your eyes are sharp
[01:05:17] <rue_house> https://www.youtube.com/watch?v=IXXLvoa9BXk
[01:05:31] <rue_house> this is the only thing I ever made practical use of arm5 for
[01:05:38] <rue_house> holding that scale
[01:05:49] <The_Jester> gonna be hard to build anything if you have absolutly no concept of your design..
[01:06:00] <Jak_o_Shadows> ahaha
[01:08:47] <The_Jester> needed a robot fedora
[01:09:01] <The_Jester> m'lady
[01:11:22] <The_Jester> just: my advice google lots an look at differnt designs, then try builing one joint using you concepts and see how it performs, when it doesnt go back and try again. eventually it will start to work and at that point your design will have evolved enough that you can redesign and get something that could actually work..
[01:12:50] <The_Jester> if you wanna build arms 3d pinting is your friend, stay away from scrap pipe and plate metal..
[01:13:11] <The_Jester> because of weight and stuff
[01:14:20] <The_Jester> okay, rue your dismissed goto bed.. talk to you tommorow buddy
[01:14:33] <rue_house> mm sorry
[01:24:51] <justanotheruser> ok thanks
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}