Back
[04:05:18] <rishabh> Hello all ,could anyone please suggest me a good open source robotics framework .I need to show the location of the robot using GUI and stuff like that .
[04:05:42] <deshipu> ROS?
[04:11:51] <rishabh> deshipu: is there a way to have a look at it's sources because i will have to change the code according to my needs
[04:15:38] <deshipu> rishabh: sure, it's all open source
[04:24:23] <rue_house> ok, the mecha will need 6 boards controlling 8 axies each
[04:25:29] <rue_shop3> my plan says its good to use redundant things, not sure how I would do redundant comms on that
[04:25:51] <rue_shop3> but the good news is that the whole mecha only requires about 144kbaud data stream to control it
[04:26:22] <rue_shop3> I should be able to hold that over a tripple bonded wifi easy
[04:27:19] <rue_shop3> it works out that I should build it up a lot like a T1,
[04:27:49] <rue_shop3> one position stream to the servos, one force stream back, and a control stream
[04:50:27] <rishabh> deshipu: is
http://wiki.ros.org/kinetic/Installation/Source the page i should be following ? i can't exactly figure out which command is getting the source code
[04:58:55] <deshipu> rishabh:
https://github.com/ros/ros
[04:59:22] <deshipu> also the other repos in
https://github.com/ros/
[05:21:17] <rishabh> depishu: thanks .
https://github.com/ros/ros_comm i plan to use this as it uses c++ .do you think i will be able to map the location of robot in real time ?sorry for these questions .i am new to all this
[05:36:57] <Triffid_Hunter> rishabh: that's what ROS is for.. maybe check youtube if you want to see what it's like
[05:43:46] <rishabh> Triffid_Hunter:okay thank you :)
[09:38:03] <anonnumberanon> >the mecha will
[11:20:57] <rue_shop3> wow I dropped 4 bytes at 2am
[11:23:16] <z64555> how can you just drop 4 bytes
[11:23:31] <z64555> I mean, that's just asking for the mice to gobble them up
[11:23:31] <rue_shop3> at 2am?
[11:23:52] <z64555> yes
[11:24:08] <rue_shop3> its not as much as it used to be, whats 4 bytes these days? its hardly a pointer anymore
[11:24:46] <rue_shop3> the blue PLA I got is junk
[11:24:54] <rue_shop3> I'm realizing that using up the last of it
[11:25:24] <rue_shop3> its the only roll that consistently has problems with everything
[11:52:56] <z64555> 4 bytes can be a significant amount of info for embedded systems
[11:56:13] <veverak> 4 bytes in data structure used bilion times starts to me soem amount
[11:56:15] <veverak> ;)
[12:20:41] <rue_bed> mmm waking up is one of those things I have to sleep off
[17:09:50] <z64555> the best part of waking up is realizing you don't have to work today and go back to sleep
[17:09:55] <z64555> :)
[17:10:24] <Snert_> soon, I shall wake up and never go to work again.
[17:11:03] <Snert_> 5 more years...lord help me make it! These users.....
[17:18:08] <Snert_> I wonder what the average arduino will be like in 5 years :)
[17:18:23] <Snert_> or if we'll even be doing arduinos by that time.
[17:45:50] <Tom_itx> what's 12v 2.58A in watts?
[17:47:09] <Tom_itx> ~30
[17:47:16] <Tom_itx> 31ish
[19:22:43] <codepython777> Can anyone help me with a power system design please? :) I'm looking to use one battery to run a few things.
[19:48:12] <SpeedEvil> what
[19:51:42] <codepython777> SpeedEvil: I want to run a few different voltages from my battery. And make sure when the motors pull stall, they are cut off - how can i do that?
[19:53:10] <SpeedEvil> http://www.ebay.co.uk/itm/5A-DC-DC-BUCK-CONVERTER-STEP-DOWN-4-5-30V-TO-0-8-28V-WITH-CURRENT-CONTROL-XL4005-/171661678735?hash=item27f7d5588f:g:MGcAAOSwL7VWp4TM - for example
[19:53:46] <SpeedEvil> This can be set to limit current, and will provide voltage at any voltage you desire under the battery voltage
[19:56:16] <codepython777> SpeedEvil: The problem is that my input battery is 18V, and I need 19v, 12v, 6v, 5v and 3.3v outputs
[19:56:44] <robotustra> use many of them
[19:57:00] <robotustra> up and down converters
[19:58:01] <robotustra> but if you'll use pulsed dc-dc converters and level converterd between different modules - the communication can work not good
[19:59:00] <SpeedEvil> yeah
[19:59:10] <SpeedEvil> for low current,s they are almost free
[19:59:28] <SpeedEvil> http://www.ebay.co.uk/itm/10-Ultra-Convertitore-Regolabile-DC-DC-Step-Down-MP1584-Alimentatore-3A-ARDUINO-/261880555982?hash=item3cf94c29ce:g:WGwAAOSwBLlVTIdS
[19:59:32] <codepython777> Lets solve my biggest problem first.
[20:00:02] <robotustra> but on your place I would unify the voltage level for all units
[20:00:35] <robotustra> let's say 24 volts input
[20:00:36] <codepython777> My battery is around 18v. My main eater are a laptop without battery = 19v + 3.5A and 19v + Motors (Stall = 45A) - how do i make sure that my motors dont eat that much, ever?
[20:01:00] <robotustra> put fuse
[20:01:08] <codepython777> I want to prioritize power to my laptop - clean power there = 19v
[20:01:15] <SpeedEvil> see the above converter
[20:01:24] <SpeedEvil> you set the output curent to 5A
[20:01:25] <robotustra> ok cuttent sence + relay
[20:01:33] <SpeedEvil> (or use an appropriate converter and do that)
[20:01:54] <SpeedEvil> set to 10A or whatever
[20:02:03] <SpeedEvil> Also - put the battery in the laptop
[20:02:59] <robotustra> codepython777: do you have a drawings of your robot?
[20:04:39] <codepython777> not yet
[20:04:51] <robotustra> I'll use 2x(24V 10Ah) LiFePO4 + 1 x 12 V 15 Ah LiPo
[20:05:08] <robotustra> and unify the power bus to 12V
[20:05:21] <codepython777> robotustra: your battery is heavy
[20:05:27] <robotustra> no
[20:05:37] <robotustra> http://i.imgur.com/oiYsNgl.jpg
[20:05:41] <codepython777> how heavy is that 24v + 10Ah?
[20:05:50] <robotustra> 1.7 kg each
[20:06:34] <robotustra> it's LiFePO4
[20:06:38] <codepython777> I was thinking of using 18.5V 5000mAh
[20:06:42] <codepython777> Lipo
[20:06:49] <robotustra> not SLA
[20:07:01] <codepython777> .9 kg
[20:07:23] <robotustra> it's ok, but charging is a problem
[20:07:33] <robotustra> and they degrade quite fast
[20:07:45] <robotustra> but for experiment is ok
[20:07:53] <robotustra> and the are flammable
[20:10:01] <codepython777> lifepo4 are safer?
[20:10:49] <robotustra> yeah, it does not fire if damaged and have up to 2000 recharge cycles
[20:11:05] <robotustra> lipo is about 500
[20:12:04] <codepython777> robotustra: thanks! Did not know that
[20:12:12] <robotustra> there are some differences, you can watch on youtube
[20:13:26] <robotustra> I got separate elements on aliexpress and assembled my own batteries
[20:13:44] <robotustra> it's 2 times chiper than to buy ready to use one
[20:14:03] <codepython777> Is there a good brand that sells them, something around 24v 5ah?
[20:14:45] <robotustra> http://www.aliexpress.com/item/16pcs-GDK-3-2v-LiFePo4-5Ah-battery-cell-high-drain-15A-for-diy-pack-ebike-battery/32513332732.html?spm=2114.01010208.3.17.WhLFr5&ws_ab_test=searchweb201556_0,searchweb201602_1_10037_10017_405_507_406_10032,searchweb201603_7&btsid=4c328641-869d-4151-884f-793b642a6722
[20:14:56] <robotustra> I got from here
[20:15:01] <robotustra> it works
[20:16:10] <robotustra> and buy charge controller for them
[20:16:56] <robotustra> like this
http://www.ebay.com/itm/Battery-Protection-BMS-PCB-Board-for-8-Packs-24V-Lifepo4-ion-Cell-40A-w-Balance-/171818334558?hash=item28012bb95e:g:HasAAOSwpdpVc~dE
[20:18:33] <robotustra> assembled you'll get something like this
http://imgur.com/8mYKZmP
[20:19:07] <codepython777> robotustra: isnt there someone who is selleing something like this pre assembled?
[20:19:10] <codepython777> 24V 5Ah?
[20:19:36] <robotustra> they have, but the prive will be 2 times bigger
[20:19:41] <robotustra> price
[20:20:25] <z64555> eh, how would you say a chip is used on a breakout board? implemented? utilized? affixed?
[20:20:28] <codepython777> smething like this:
https://bmsbattery.com/73-24v-battery - but smaller
[20:20:33] <z64555> doing a stupid paper for college
[20:26:46] <robotustra> codepython777:
http://www.ebay.com/itm/K2-Energy-12-8V-5-2Ah-K2B12V5P-Lithium-Ion-Phosphate-LiFEPo4-Motorcycle-Battery-/272275336649?hash=item3f64dfedc9:g:6dQAAOSwMNxXYZ7Y
[20:26:48] <codepython777> robotustra:
https://www.electricscooterparts.com/lifepo412v-24vbatteries.html - seems similarly priced to the diy?
[20:27:24] <codepython777> robotustra: that ebay one is too heavy for the wattage it supplies?
[20:27:35] <codepython777> .9kg for 12v 5ah
[20:27:43] <codepython777> yours is 24v 10ah , 2kg
[20:29:11] <robotustra> 1.7kg
[20:29:34] <robotustra> I weighted just cells
[20:30:58] <robotustra> yes fully assembled about 2 kg
[20:31:31] <robotustra> 0.9 is an enclosure weight
[20:31:36] <robotustra> plus
[20:32:27] <robotustra> 8 cells weights 1.7 kg + enclisure and BMS for mine is about 300 g
[20:32:40] <codepython777> I could live with 24V 4Ah - but i do need 100W
[20:34:32] <robotustra> I counted for my robot the max power should be not more than 140W
[20:34:48] <robotustra> average is about 50 watts
[20:35:55] <codepython777> robotustra:
https://www.amazon.com/LiFePO4-Battery-TLR200-Reflex-1986-1987/dp/B0126OY684
[20:36:12] <codepython777> 544g- how do i charge this thing?
[20:37:13] <robotustra> usual power supply with current limiter
[20:37:51] <codepython777> seems like 24v 10ah is common - 5 is not
[20:38:16] <robotustra> I charge with such PS
http://www.ebay.com/itm/New-30V-10A-Precision-Variable-Adjustable-Digital-Regulated-DC-Power-Supply-47EO-/321954956292?hash=item4af602c404:g:3LgAAOSw5IJWd6cI
[20:38:33] <robotustra> yeah, take 10AH
[20:38:49] <codepython777> robotustra: do you need a cell balancer for these batteries?
[20:38:54] <robotustra> or use 12.8V 10 AH
[20:38:55] <codepython777> or just two +- connections?
[20:39:14] <robotustra> I use balancer
[20:39:56] <robotustra> and it's a protection as well
[20:40:00] <robotustra> http://www.ebay.com/itm/Battery-Protection-BMS-PCB-Board-for-8-Packs-24V-Lifepo4-ion-Cell-40A-w-Balance-/171818334558?hash=item28012bb95e:g:HasAAOSwpdpVc~dE
[20:40:08] <robotustra> I use this one
[20:40:50] <codepython777> robotustra:
https://www.amazon.com/LiFePO4-10-14ah-Battery-Arctic-2005-2012/dp/B012E4VSQY - how come this is 51.2Wh (written on battery)?
[20:42:29] <robotustra> I don't know what americans write on batteries
[20:42:37] <robotustra> it can be whatever
[20:42:56] <codepython777> robotustra: how many cells are in that battery? what kind?
[20:43:12] <robotustra> this one - I don't know
[20:43:51] <robotustra> mine are very similar to lipo ones
[20:45:45] <codepython777> robotustra:
https://www.amazon.com/Bioenno-Power-12V-10Ah-Battery/dp/B01CIT16HQ - i dont see a way to apply a balancer on this one?
[20:50:32] <codepython777> robotustra: what do you think about this one:
https://www.bioennopower.com/collections/12v-series-lifepo4-batteries/products/12v-8ah-lfp-battery-abs-sealed-black-case?variant=1014198656
[20:50:57] <codepython777> robotustra: The only problem I have is that I might need more discharge than 10A at times
[20:54:13] <robotustra> doesn't matter
[20:54:25] <robotustra> they can handle such current
[20:54:39] <anonnumberanon> 10A is kinda high, it will make a small robot run kinda fast (if its programmer knows what he is doing)
[20:55:06] <robotustra> in this case go to 24V
[20:55:23] <robotustra> actual voltave will be about 26.5V
[20:57:24] <anonnumberanon> (at 5V what I said was based on)
[20:57:31] <codepython777> robotustra: my problem is that sometimes my motors pull 4 to 5A - when climbing things
[20:57:39] <codepython777> robotustra: that means i can easily need 25A
[20:57:46] <codepython777> for short durations
[20:58:03] <anonnumberanon> They are rated for that high are you sure?
[20:58:37] <codepython777> anonnumberanon: stall current on each one is 45A and I've 4 of them
[20:58:48] <robotustra> yes, they can handle big discharge current
[20:58:58] <codepython777> the spec says: Maximum Peak Discharge Current: 18A (2 sec.)
[20:58:59] <robotustra> BMS limits it to 40A
[20:59:00] <anonnumberanon> Waw
[20:59:13] <anonnumberanon> Do they have a high torque?
[20:59:19] <codepython777> yes
[20:59:35] <codepython777> robotustra: the ones i am looking at, the bms might limit it at 20A
[20:59:38] <codepython777> https://www.bioennopower.com/collections/12v-series-lifepo4-batteries/products/12v-9ah-lifepo4-battery
[20:59:40] <robotustra> put BMS on the battery
[20:59:51] <robotustra> good
[21:00:10] <codepython777> Maximum Peak Discharge Current: 18A (2 sec.) - I am guessing after 2 seconds of 18A - something fill blow?
[21:00:22] <robotustra> no
[21:00:33] <robotustra> it could heat a little bit
[21:00:36] <anonnumberanon> it will start warming up
[21:00:59] <codepython777> robotustra: or the internal circuit has a fuse?
[21:01:10] <codepython777> how would they say in the spec - 18A (2sec) - otherwise?
[21:01:14] <anonnumberanon> batteries don't have circuits
[21:01:19] <anonnumberanon> i mean not these
[21:01:53] <anonnumberanon> 2 sec is the reasonable time before you're starting to jeopardize the battery's safety
[21:02:00] <codepython777> anonnumberanon: look at the charger - it has a balancer for sure inside
[21:02:30] <anonnumberanon> you should start finding an outlet power supply though first right? before going the battery route, so you don't have to charge it before you experimetn
[21:02:55] <anonnumberanon> ah yeah
[21:04:18] <robotustra> I will use caps and coils to cut the peacks of current
[21:04:48] <codepython777> caps and coils? no fuse?
[21:05:50] <robotustra> fuse is a must
[21:06:14] <robotustra> but to relax your battery use this:
http://www.digikey.com/en/articles/techzone/2012/jun/~/media/Images/Article%20Library/TechZone%20Articles/2012/June/Managing%20Converter%20In-Rush%20Current/article-2012june-managing-converter-in-rush-fig1.jpg
[21:06:26] <anonnumberanon> thing is you don't want to fuse it and then as soon as the current reaches the value the fuse blows, you need something that can fuse only after a certain period of time
[21:06:37] <robotustra> http://www.digikey.com/en/articles/techzone/2012/jun/managing-converter-in-rush-current
[21:08:19] <codepython777> robotustra: I want something simple :)
[21:08:29] <codepython777> as simple as possible :)
[21:10:08] <robotustra> the simplest thing is 1 fuse, 1 diode, 2 cups and 1 coil
[21:10:40] <robotustra> diod pritects you from wrong polarity
[21:10:56] <SpeedEvil> So - find a converter like I linked first, which can e set to 9A output current, and you're done
[21:11:10] <robotustra> 2 caps and coil - against pulses
[21:11:32] <SpeedEvil> motors exceed 9A, output voltage drops (remaining at 9A) and torque stays constant
[21:12:16] <codepython777> SpeedEvil: the one you linked is max 5A - and seems like i need step up from 12 to 19
[21:12:35] <robotustra> motors can give huge voltage pulses
[21:12:38] <SpeedEvil> you have a 19V attery, I thought
[21:12:51] <SpeedEvil> what is the nominal motor volts?
[21:13:35] <codepython777> Seems like I'll have to get a 12v battery (14.5v)
[21:13:38] <SpeedEvil> you could in principle simply use two in parallel. Or there are many similar current limited SMPS supplies with higehr output currents
[21:13:47] <codepython777> I need to power a circuit with 19v (max 4A current)
[21:14:00] <codepython777> buck up?
[21:14:06] <codepython777> I could run my motors at 12v
[21:14:22] <SpeedEvil> boost
[21:14:42] <anonnumberanon> what motors are they?
[21:14:50] <robotustra> codepython777: are you building battlebot?
[21:15:22] <codepython777> just googling battlebot now
[21:15:27] <robotustra> why do you need such big current?
[21:16:09] <anonnumberanon> those specs would be for a humanoid
[21:16:09] <codepython777> I carry weight - sometimes on inclines?
[21:16:26] <robotustra> what is the max load?
[21:16:39] <robotustra> and max speed&
[21:16:42] <robotustra> ?
[21:17:27] <codepython777> robotustra: 10kg + 2 m/sec
[21:17:40] <codepython777> i also have a laptop that eats power 19v 4a
[21:18:07] <robotustra> total weight of the robot + angle of inclination
[21:18:54] <robotustra> 2 m/s - is too much it's 7.2 km/h
[21:19:27] <codepython777> angle of inclination = 30 degrees at times - short inclines
[21:19:43] <robotustra> weight&
[21:19:44] <robotustra> ?
[21:19:48] <robotustra> total
[21:19:59] <codepython777> robotustra: 15kg max
[21:21:07] <robotustra> yeah, it needs max 150W of power
[21:21:33] <codepython777> robotustra: whats the max discharge current you calculated?
[21:21:35] <robotustra> just to move with efficiency of 100%
[21:21:57] <robotustra> 150/ 25v = 8 А
[21:22:17] <robotustra> but it's continuous current
[21:22:33] <robotustra> it depends on how are you going to start and stop
[21:23:14] <robotustra> now I'm doing about the same thing for my robot - I'm going to implement slow start and stop
[21:23:26] <codepython777> robotustra: how are you doing slow start and stop?
[21:23:26] <robotustra> with small acceleration
[21:23:29] <codepython777> ah i see
[21:23:32] <codepython777> I could do that too
[21:23:42] <robotustra> yeah, just use PWM
[21:24:08] <robotustra> and change it gradually withing 1-2-3 seconds
[21:24:24] <codepython777> I might have to stop suddenly
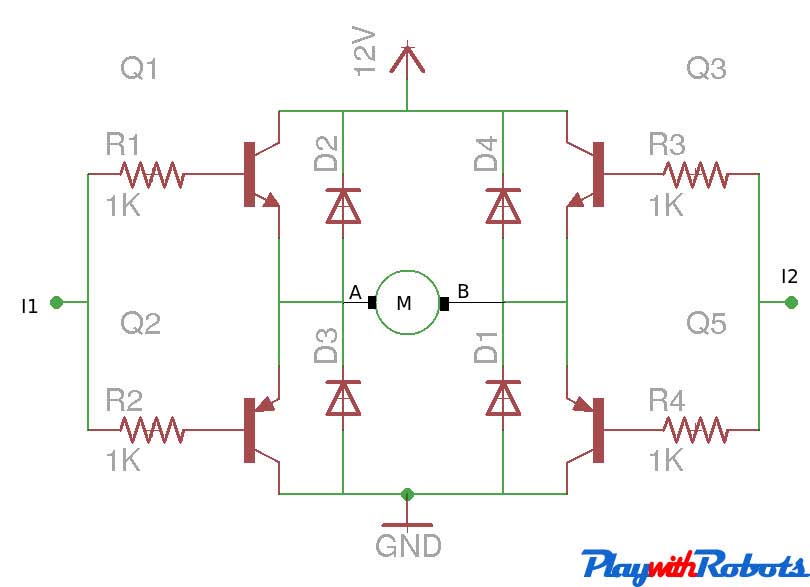
[21:24:58] <robotustra> it doesn't matter if you have protecting diods in your driver
[21:25:57] <robotustra> http://playwithrobots.com/images/old/h%20bridge%20transistor.jpg
[21:26:28] <robotustra> these diods help for abropt stop
[21:27:28] <robotustra> so if you'll start and stop smoothly - you'll not need more than 10А
[21:27:50] <robotustra> for the whole system
[21:29:20] <robotustra> mine robot on the flat floor consumes only 17W when it moves on a line, and about 30 W when it turns
[21:29:37] <robotustra> tank mode
[21:31:12] <robotustra> < robotustra> 150/ 25v = 8 А
[21:31:16] <robotustra> err
[21:31:20] <robotustra> 6A
[21:31:29] <robotustra> 6 Amps not 8
[21:32:10] <codepython777> robotustra: is that theory calculation, or did you measure the 17 and 30?
[21:35:31] <robotustra> I measure
[21:36:27] <robotustra> I use this one
http://www.ebay.com/itm/100A-60V-DC-RC-Helicopter-Airplane-Battery-Power-Analyzer-Watt-Meter-Balancer-FE-/331814415932?hash=item4d41ae2e3c:g:nJ8AAOSw2s1UwlPb
[21:36:42] <robotustra> it shows the power and current
[21:40:04] <robotustra> codepython777:
https://www.youtube.com/watch?v=om_hhY21Tbg&t=57s
[22:29:07] <Wetmelon> omg that's an OLD H-bridge diagram
[22:29:20] <Wetmelon> I'm like 99% sure they copied & pasted it from methuselah
{kind=link}
{kind=link}
{kind=link}