Back
[00:24:09] <rue_house> the invitation is out to anyone with a 40' tall car eating robot to come to the sunshine coast maker faire
[02:18:57] <z64555> hmph. spent most of the day designing a GUI and fooling with opengl than much robot coding
[02:20:44] <z64555> once I get the gui working, I'll move onto fighting with libusb
[02:21:00] <z64555> and figure out how to transfer data over it
[02:33:06] <rue_shop5> THERE! 200pcs of 6" #14 bare copper wire
[02:33:31] <z64555> did it by hand?
[02:33:37] <rue_shop5> yea
[02:33:41] <z64555> nice
[02:33:57] <rue_shop5> parts for workshops for an upcomming faire
[02:50:29] <rue_shop5> 120 kits
[03:05:50] <rue_shop5> I think inkscape was a drafting program that went horribly out of control
[03:06:27] <deshipu> it's one of the better open source graphics programs out there
[03:06:40] <deshipu> with mypaint and gimp
[03:07:11] <rue_shop5> its good, I'm trying to understand how to code fill patterns in a vector sense for my CAM software I'm writing
[03:07:20] <rue_shop5> thought I'd see what inkscape did for fill options
[03:07:38] <rue_shop5> seeing didn't help
[03:38:40] <rue_shop5> ok, so I have a robot arm that can play a motion file
[03:39:13] <rue_shop5> and I'm working on a marble holder that will have a sensor to know there is a marble ready in it
[03:40:26] <rue_shop5> so how do I co-ordinate the two
[03:43:01] <rue_shop5> hey rue
[03:43:03] <RifRaf> is a motion file like a gait?
[03:43:04] <rue_shop5> hey
[03:43:11] <RifRaf> hi
[03:43:19] <rue_shop5> its a position/time set
[03:43:22] <rue_shop5> hi
[03:43:36] <RifRaf> working on an arm here too
[03:44:14] <rue_shop5> I have an input arm, I can use it for realtime movement or setting postions so save to a file for playback
[03:44:24] <rue_shop5> does your arm use servos?
[03:44:37] <RifRaf> ah cool, yes about 6 servos
[03:44:39] <rue_shop5> if you want, I can dump you with a software set
[03:44:46] <rue_shop5> yep, mine are 6
[03:45:01] <rue_shop5> I use a pro mini as a servo controller
[03:45:10] <rue_shop5> on a usb-serial converter
[03:45:17] <rue_shop5> m328
[03:45:26] <rue_shop5> did you se the arms?
[03:45:36] <RifRaf> am trying to get the gait software running again, and want to add a camera and muck about with some vision stuff
[03:45:56] <rue_shop5> arm or hexapod?
[03:46:28] <RifRaf> i have an atmega324 controller on it i made long time ago, but has 9 pin serial, not working with usb adapter on laptop yet
[03:46:30] <RifRaf> arm
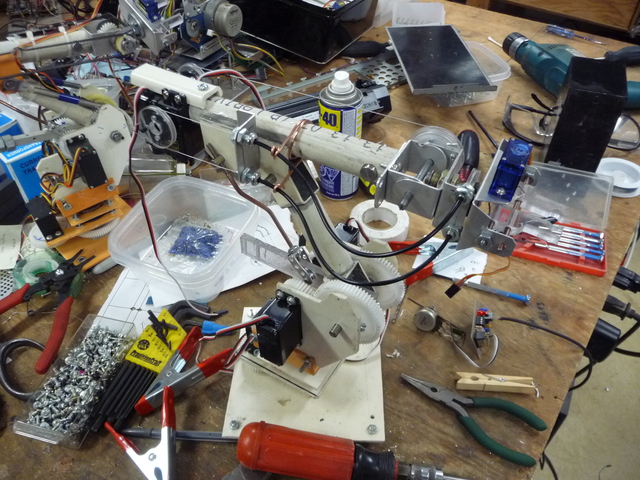
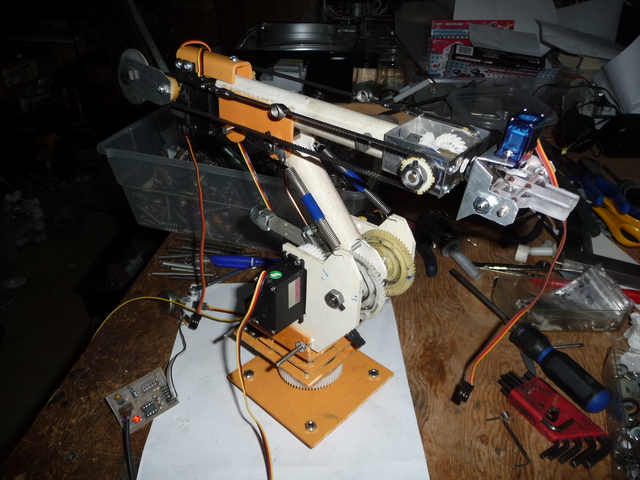
[03:46:32] <rue_shop5> http://ruemohr.org/~ircjunk/robots/arm9/p1060858.jpg
[03:46:58] <rue_shop5> http://ruemohr.org/~ircjunk/robots/arm8/p1060720.jpg
[03:47:04] <rue_shop5> http://ruemohr.org/~ircjunk/robots/arm8/p1060649.jpg
[03:47:41] <rue_shop5> http://ruemohr.org/~ircjunk/robots/arm7/p1060364.jpg
[03:48:14] <RifRaf> can't find an image of mine :(
[03:48:28] <rue_shop5> http://ruemohr.org/~ircjunk/robots/arm6/p1070897.jpg
[03:49:00] <RifRaf> am getting some micro hydraulic stuff
[03:49:09] <rue_shop5> http://ruemohr.org/~ircjunk/robots/arm4/p1060574.jpg
[03:49:19] <rue_shop5> 1:1 with mtoors or with valves?
[03:49:40] <RifRaf> and gonna make parts, with motors controlling valves
[03:49:57] <rue_shop5> well tell me how that goes, havn't solved it yet
[03:50:38] <rue_shop5> ok, so back to my problem
[03:50:42] <RifRaf> will do, just want to learn, and have the stuff available to me now, and the people that have the knowledge
[03:50:57] <RifRaf> yep, i dunno what you want to sync
[03:51:02] <rue_shop5> I have a sensor that can detect there is a marble ready on the incomming side
[03:51:16] <rue_shop5> the sensor goes to a m328 that goes to a usb-serial
[03:51:29] <rue_shop5> I need a protocol and a method to run the program
[03:51:55] <rue_shop5> RifRaf, how far along are you on your arm?
[03:52:22] <RifRaf> this far
https://www.youtube.com/watch?v=5VhbpxO4LIU
[03:52:32] <rue_shop5> the servo control code I wrote runs 8 servos, but to really high resolution with NO jitter
[03:52:38] <RifRaf> but has been a few years, need to demo it it next week
[03:52:44] <rue_shop5> damn I cant do youtube on this one
[03:53:20] <RifRaf> heh, nothing has changed :)
[03:53:38] <rue_shop5> ah chrome can do it in html6
[03:54:05] <rue_shop5> 3 years ago eh?
[03:54:19] <RifRaf> yep time flies, but is sitting in front of me now
[03:54:46] <rue_shop5> well looks like you dont need any new software...
[03:55:08] <RifRaf> nope, i want to try that stufff again, webbotlibs
[03:55:21] <RifRaf> and roborealm for the vision stuff
[03:56:00] <rue_shop5> I got that cnc I started 12 years ago going
[03:56:09] <rue_shop5> changed it over to steppers tho
[03:56:16] <RifRaf> cool, mine is still not going in shed
[03:56:21] <rue_shop5> new drivers, can run the mtoors up to 1650rpm
[03:56:34] <RifRaf> need to biuld table one day, all steel is chopped up
[03:57:05] <rue_shop5> how did the 3d printer market do for ya
[03:57:51] <RifRaf> was good pocket money
[03:57:56] <rue_shop5> good show
[03:58:05] <rue_shop5> what you doing for work now?
[03:58:05] <RifRaf> still plan to make a bunch more, have alot of parts
[03:58:10] <rue_shop5> cnc machine still?
[03:58:18] <RifRaf> nah, moved on
[03:58:25] <rue_shop5> you do that :)
[03:58:30] <RifRaf> makin giant robots
[03:58:38] <rue_shop5> good show
[03:58:40] <rue_shop5> industrial?
[03:58:44] <RifRaf> yep
[03:58:47] <rue_shop5> nice
[03:59:00] <rue_shop5> hard to find anyone doing production these days
[03:59:03] <rue_shop5> less china
[03:59:41] <RifRaf> yep
[03:59:53] <rue_shop5> I need a way for one program to tell the other program to run a cycle
[04:00:16] <rue_shop5> restarting the player program is a snot cause it reinitializes the zeors
[04:00:22] <RifRaf> have you done much canbus?
[04:00:28] <rue_shop5> no
[04:00:38] <rue_shop5> looked at it, neat protocol
[04:00:45] <RifRaf> need to learn that now
[04:01:12] <rue_shop5> from what I recall its like having access to a bunch of memory chips
[04:01:41] <rue_shop5> maybe I can open a pipe file
[04:01:45] <rue_shop5> oh wait
[04:01:56] <rue_shop5> I could make a tcp server and issue messages on it
[04:02:27] <rue_shop5> or use a local port, maybe udp
[04:03:16] <rue_shop5> if a few arms open a pipe read-only, I wonder if everyone gets the messages
[04:04:22] <rue_shop5> RifRaf, did you ever play with any grbl?
[04:04:31] <rue_shop5> macheies
[04:05:14] <RifRaf> nope
[04:05:33] <rue_shop5> I'm reduced to writing a 2.5D CAM program for linux
[04:06:15] <rue_shop5> not at all sure how to write the code to fill an area for pocketing
[04:07:22] <RifRaf> surely there are linuxcnc programs
[04:07:33] <rue_shop5> no CAM software
[04:07:43] <rue_shop5> there are programs you can put STLs into
[04:07:59] <rue_shop5> but nothing to take a dxf and let you select holes/traces/pockets
[04:08:09] <rue_shop5> there are a few that died and dont work
[04:08:23] <rue_shop5> one of them is a java app that just crashes
[06:13:59] <TheFactory7> is it a bad idea to put an arm on a hexapod? Can't find many people that attempted it, I wonder if it's because it is a bad idea
[07:42:46] <jhylands> TheFactory7, the issue with that is that walkers have a very limited payload, compared to wheeled/tracked vehicles
[08:33:21] <TheFactory7> jhylands: thanks, makes sense
[12:59:04] <rue_shop5> every picked up a project you made long ago to get it going again and realized how much has changed since you did it?
[13:30:15] <rue_shop5> hmm I changed my interpolator a LOT when I redid it for absolute position servos
[13:57:56] <deshipu> TheFactory7: also, walkers usually are able to move their body quite a lot, so just attaching a gripper to the body often is enough
[13:58:15] <deshipu> rue_shop5: never
[13:58:30] <deshipu> rue_shop5: nothing ever changes
[13:58:44] <deshipu> rue_shop5: I have a couple of projects that are waiting for a change in the laws of physics
[14:14:02] <TheFactory7> is there any market for used DIY robots? known venues? looking online i found only used industrial robots
[14:18:15] <deshipu> what would you use them for?
[14:18:29] <deshipu> the diy robots are for building, not using
[14:23:26] <TheFactory7> i would modify what i want and program it, i'm mostly interested in the programming part, i'm terrible at the rest
[14:24:21] <z64555> the only robots you can find aside from industrial bots are educational bots for colleges and high schools
[14:24:37] <z64555> if you're lucky you may find the odd bot or two on ebay
[14:25:19] <TheFactory7> i couldn't find the kit i wanted but i did find some partial kits (i want to build a wheel/tracked/legged robot with on top an arm like one from lynxmotion/trossenrobotics)
[14:25:21] <z64555> rue_shop5: yep, happens every time I try to pick up the quadrotor project again
[14:27:03] <TheFactory7> wheel/tracked/legged -> I'm still undecided... right now i'm looking at wheeled again
[14:40:34] <deshipu> wheeled are simple, which lets you do much more with them before your project collapses under its own complexity
[14:47:31] <TheFactory7> deshipu: all the better then, i've done 2 wheeled already but i want to take this to another level (better motors better electronics and software) - do you always use ros?
[14:49:54] <deshipu> TheFactory7: I've never used ros
[14:49:58] <deshipu> TheFactory7: I plan to some day
[14:50:29] <deshipu> but too much to learn about it when I can instead be learning about the robots
[14:51:02] * veverak agress
[14:51:08] <TheFactory7> you can do without but eventually if you make anything complex you basically redevelop ros
[14:51:11] <deshipu> not that I learned much in the last year
[14:51:25] <veverak> but it's more or less worth it eventually
[14:51:41] <z64555> ros is multithreaded, isn't it?
[14:51:52] <veverak> ros is multiple separated apps
[14:52:01] <veverak> not exactly multithread, but ... :)
[14:52:01] <z64555> so yes
[14:52:16] <TheFactory7> ros even has a lib for arduino to connect to the ros framework within an arduino
[14:52:19] <z64555> ok lemme ask, can the apps be run concurrently
[14:52:21] <TheFactory7> i.e. sub pub
[14:52:34] <TheFactory7> z64555: sure, i had multiple ros app running
[14:52:39] <TheFactory7> some pushing data, some listening, some both
[14:52:52] <z64555> yeah, multithreaded.
[14:52:54] <z64555> neat
[14:53:04] <veverak> speaking of which
[14:53:16] <veverak> any tips for ROS repository for raspbian jessie ?
[14:53:17] <TheFactory7> all sensor data in theory gets pushed and from anywhere you can subscribe and act on it
[14:53:47] <TheFactory7> i tried it on ubuntu and on archlinux, and i used to prefer arch for it (much faster)
[14:54:00] <z64555> right, it's treated as a service, like in the big boy os's
[14:54:01] <TheFactory7> but maybe things have changed since it was a few years back
[14:54:33] * veverak want's to run it on raspberry
[14:54:39] <veverak> kind of makes sense to use most supported distro
[14:54:41] <veverak> but
[14:54:46] <veverak> I can't find repository :/
[14:54:50] <TheFactory7> which i guess is ubuntu?
[14:54:53] <veverak> and I don't really want to compile everything
[14:54:55] <veverak> wat?
[14:54:57] <veverak> for raspberrY?
[14:54:59] <veverak> nope, raspbian
[14:55:01] <veverak> :D
[14:56:10] <veverak> (from the point of view of raspberry of course)
[14:57:13] <TheFactory7> veverak: are you following
http://wiki.ros.org/ROSberryPi/Installing%20ROS%20Indigo%20on%20Raspberry%20Pi ?
[14:57:21] <TheFactory7> assuming you want Indigo
[14:58:26] * veverak wanted jade
[14:58:52] <veverak> anyway
[14:59:08] <veverak> http://packages.ros.org/ros/ubuntu/dists/jessie/main/binary-armhf/Packages
[14:59:13] <veverak> that's awfully short list
[14:59:18] <veverak> but it was shorter to tell the truth
[15:02:26] <LiohAu_> anybody used the ros explorer package ?
[15:02:44] <LiohAu_> or any other package that could produce a map ?
[20:55:26] <rue_house> aha! china dosn't call it acme, they call it trapazoidal
[20:55:55] <Tom_itx> they didn't know how to copy acme
[20:56:17] <Tom_itx> kept coming up with rr and wilie cyotie
[20:56:22] <rue_house> then again, its metric, so mabye its not technically acme!
[21:02:35] <z64555> erwhat
[21:03:33] <z64555> oh, acme thread
[21:04:25] <z64555> https://en.wikipedia.org/wiki/Trapezoidal_thread_forms
[21:11:10] <rue_shop5> but china dosn't list with the word acme, you have to search for 'trapazoidal'
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}