Back
[01:47:01] <rue_house> http://ruemohr.org/~ircjunk/robots/arm6/slide.htm
[01:47:12] <rue_house> chec it out! I fixed the sideshow script!
[01:47:19] <rue_house> pause, fwd and back now work!
[01:52:46] <rue_house> http://ruemohr.org/~ircjunk/robots/arm8/slide.htm
[01:54:18] <rue_house> I should make soemthing up to take 1/2 and 3/4" pvc pipe and make it square
[07:14:09] <codepython777> anyone here? :)
[07:17:21] <deshipu> no
[07:19:04] <codepython777> hi deshipu
[07:19:11] <codepython777> what are you working on?
[07:20:58] <deshipu> preparing 25 kits for a robot workshop
[07:21:10] <deshipu> https://hackaday.io/project/9927-tote-had/log/35025-1-done-24-more-to-go <-- current status
[07:22:13] <codepython777> deshipu: nice!
[07:22:46] <codepython777> deshipu: how to do the wires from the motors goto the PCB? Solders?
[07:23:31] <deshipu> codepython777: I use servomechanisms, which just plug into those male headers
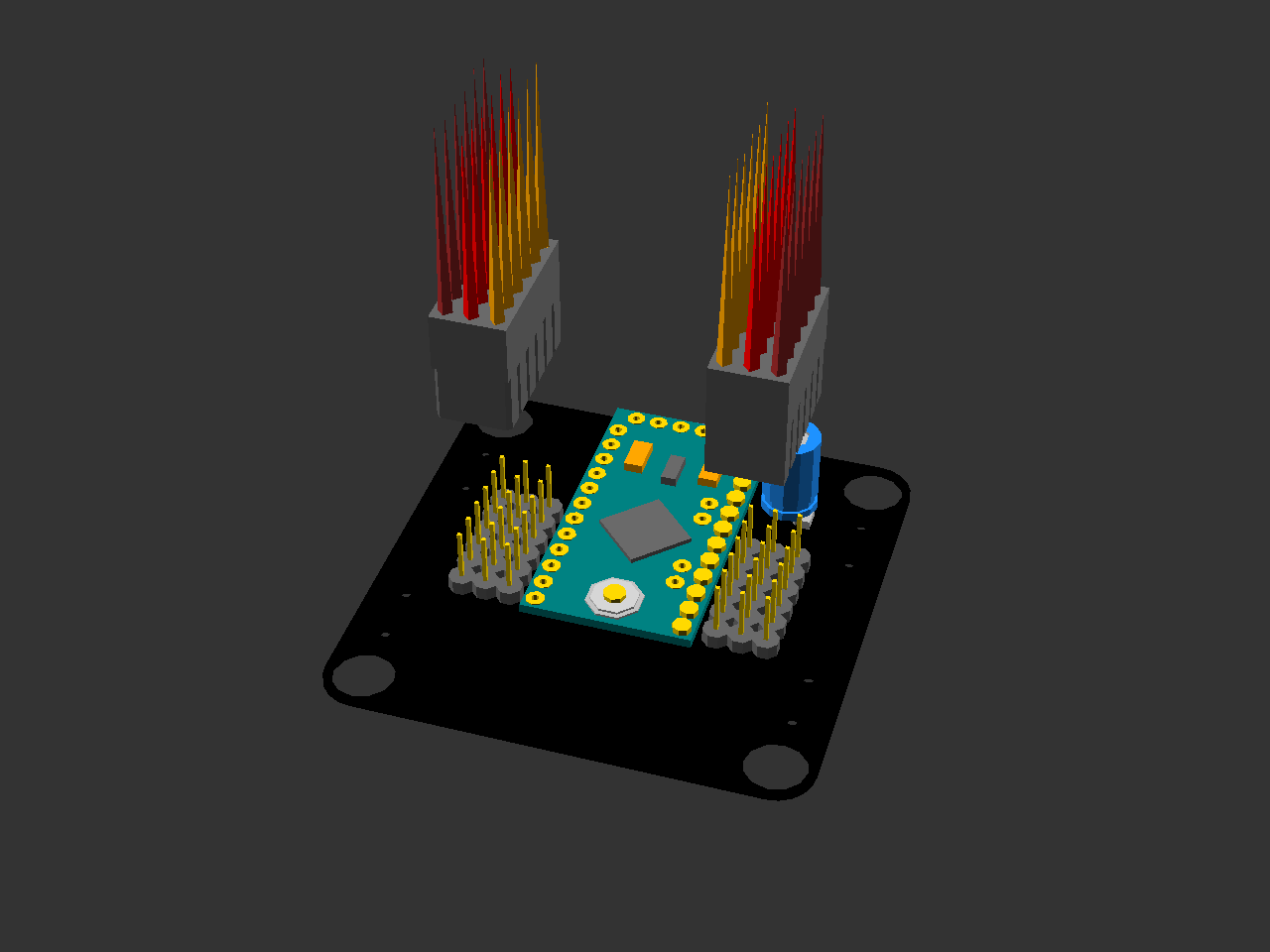
[07:24:08] <deshipu> https://cdn.hackaday.io/images/2561141458492154626.png <-- like this
[07:24:44] <codepython777> deshipu: was the PCB designed by you?
[07:24:53] <codepython777> is the middle thing - Arduino?
[07:25:08] <deshipu> yes, and yes
[07:25:28] <codepython777> how much was the cost to fabricate the PCB - 25 pieces?
[07:25:30] <deshipu> the board has a Pro Mini for controlling the servos, and an ESP8266 for running the rest of the code and communication
[07:26:00] <deshipu> codepython777: $28 for 30 pcbs 5x5cm
[07:26:00] <codepython777> what cad did you use to design the PCB? Who fab-ed it? How much was the cost?
[07:26:17] <codepython777> how did you get that price?
[07:26:19] <deshipu> codepython777: I used Fritzing, and sent it to DirtyPCBs
[07:26:29] <deshipu> http://dirtypcbs.com/
[07:26:47] <deshipu> it's their normal price
[07:27:00] <deshipu> other fab houses have pretty similar prices
[07:27:06] <codepython777> deshipu: so the arduino is bought separately? The components are not on the PCB?
[07:27:30] <deshipu> yeah, I had to solder it all myself
[07:27:36] <deshipu> and order the components separately
[07:27:44] <deshipu> I still have 24 more to make
[07:28:01] <codepython777> oh, so your PCB is just pins + wires + Arduino - no ICs or components on the PCB?
[07:28:38] <deshipu> what I got from DirtyPCBs is just the boards, nothing else
[07:29:07] <deshipu> my board is Arduino + headers + some resistors + switch
[07:29:28] <deshipu> and the esp8266 plugs into that socket below the arduino
[07:30:24] <deshipu> I also wanted to have a big capacitor in there, but the package didn't arrive on time
[07:30:31] <deshipu> I might put it there if it comes
[07:30:34] <codepython777> I see. so essentially you have a PCB on which you solder two different boards - ESP and Arduino
[07:30:57] <deshipu> yes
[07:31:05] <deshipu> modules :)
[07:31:08] <codepython777> nice
[07:31:36] <deshipu> I did it partly because I didn't want to solder that much, and partly because you can buy a Pro Mini cheaper than the parts for it
[07:31:53] <codepython777> understood
[09:23:06] <rue_house> hell of a project
[09:25:39] <veverak> deshipu: cool!
[09:26:42] <deshipu> still waiting for the package with batteries to arrive
[09:27:40] <veverak> hmm
[09:28:00] <veverak> is there sane way in python how to get partition information about unmounted disk?
[09:31:11] <veverak> maybe pyudev
[09:31:22] <veverak> nah, that lacks portability to windows
[09:31:24] <veverak> damn it
[09:31:43] <rue_house> haha you crossed the abstraction layer
[09:32:52] <deshipu> windows doesn't do mounting anyways...
[09:33:06] <deshipu> it ejects ;)
[09:33:10] <rue_house> it does, you just cant control it
[09:33:12] <veverak> nah
[09:33:30] * veverak wanted to make smart backup tool for linux&windows
[09:33:42] <deshipu> veverak: don't go there, it's not worth it
[09:33:47] <veverak> but I have stuff to do for next year so I will skip that one
[09:33:49] <rue_house> why is it smart t6o chase after unmounted partitions?
[09:33:49] <deshipu> veverak: also, take a look at borgbackup
[09:34:03] <deshipu> rue_house: "smart"
[09:34:14] <veverak> deshipu: will do
[09:34:23] <rue_house> why is it smart to chase after unmounted partitions?
[09:34:37] <veverak> rue_house: wanted to make backup of content
[09:34:42] <veverak> instead of dding entire disk
[09:34:50] <veverak> like rdiff-backup of content
[09:36:41] <veverak> deshipu: thanks!
[09:36:49] <veverak> you saved me from reinventing wheel propably
[09:37:24] <rue_house> its hard to get away form the square ones
[09:41:47] <veverak> wow
[09:41:52] <veverak> borg prune is awesome
[09:41:54] <veverak> :)
[09:42:42] <rue_house> anyone use rsync anymore?
[09:43:02] * veverak
[09:43:17] <veverak> but rsync is to move data aroun, not incremental backup
[09:43:20] <veverak> :)
[09:45:13] <deshipu> making a backup is kinda moving the data around...
[09:49:22] <veverak> "incremental backup"
[09:51:51] <deshipu> rsync does the incremental part
[09:51:56] <deshipu> well, diff
[09:52:37] <veverak> yeah, but doesn't keep history of changes?
[10:15:43] <codepython777> deshipu: When you designed that PCB - how did you get the male pins on top of the PCB?
[10:15:58] <codepython777> can i get that from dirtypcbs? or did you do that by hand?
[10:16:29] <veverak> deshipu: anyway, thanks, redesigning script to use brogbackup just now
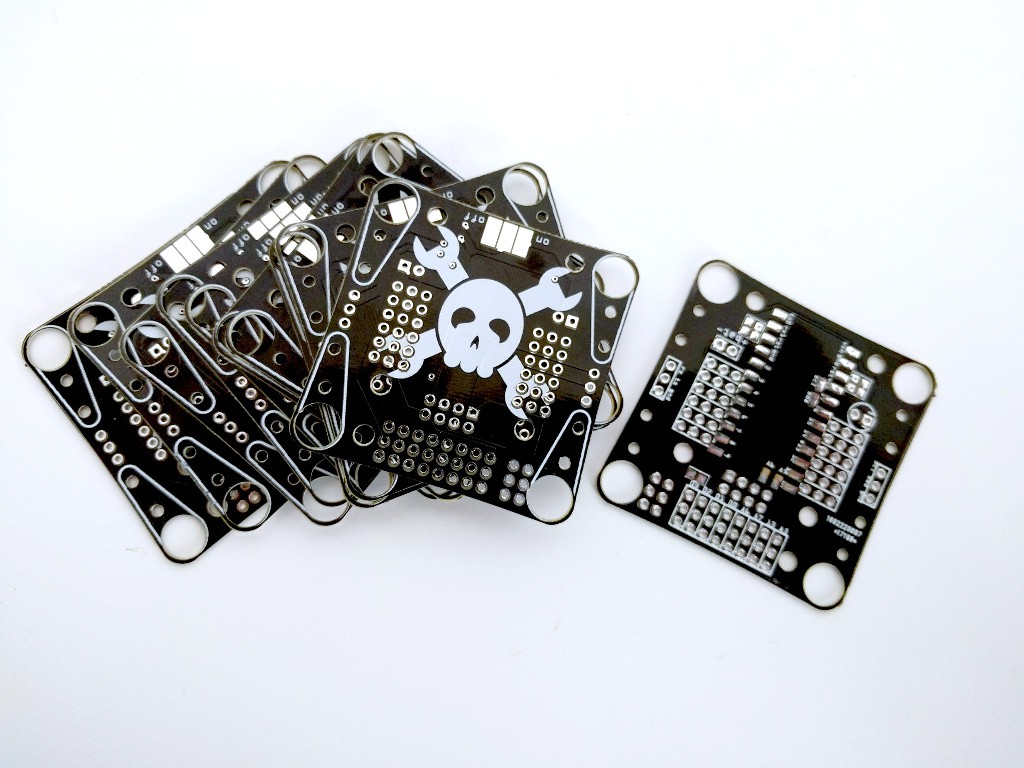
[10:19:02] <deshipu> codepython777: what do you mean? the pcb just has holes, you can put the pins on top or on the bottom, however you like
[10:20:06] <deshipu> codepython777: this is what you get from dirtypcbs:
https://cdn.hackaday.io/images/5903471457602549184.jpg (this is the old version, with pads instead of holes)
[10:26:13] <codepython777> deshipu: in the rendering you sent me, there were nice male pins on the board - how did you get that?
[10:26:41] <codepython777> deshipu: then you have to worry about exact spacing of the pins?
{kind=link}
{kind=link}