Back
[00:23:23] * z64555 messes with ming
[00:24:08] <z64555> there's supposed to be a gui for this for looking up available packages, but I forgot the name of the .exe
[00:30:29] <z64555> there it is, mingw-get
[01:26:53] <MarkX> https://www.youtube.com/watch?v=QRbvNL1PHKg
[01:27:06] <z64555> grabbing code composer (maybe) to see if I can get an IDE set up
[01:33:45] <z64555> ack, too many tabs open
[01:33:49] * z64555 opens a new window
[01:41:58] <MarkX> if i feed voltage into a brushed dc motor but stop it forcefully from rotating, what is happening inside the motor?
[01:43:38] <Triffid_Hunter> MarkX: the coils are burning
[01:43:52] <Triffid_Hunter> MarkX: that condition is called stall, and it will destroy most motors in a matter of seconds
[01:44:16] <MarkX> that explains the smell
[01:44:29] <MarkX> k i will try to not do that
[01:44:31] <Triffid_Hunter> MarkX: while the motor is spinning, a combination of winding inductance and generator effect keeps the winding current under control. In this state, ohmic winding resistance is a pure parasitic loss that only reduces efficiency
[01:45:19] <Triffid_Hunter> MarkX: but when the motor is stalled, the ohmic winding resistance is the *only* thing limiting the current. The current will climb to a very high value, and the windings will burn off their insulation and short out. Now they're extremely poor inductors since they have shorted turns and the motor won't work right anymore and will always get super hot
[01:46:10] <Triffid_Hunter> MarkX: it is possible to design a motor so that the winding resistance at rated voltage is high enough to prevent self destruction, but they tend to have poor efficiency as a result. I believe they're called trolling or traction motors
[01:46:33] <Triffid_Hunter> MarkX: if you need your motor to not self destruct in stall conditions, consider constant current drive, or a stepper motor
[01:47:06] <MarkX> okay cool.
[01:47:29] <MarkX> now in terms of calibration
[01:47:43] <MarkX> for calibrating my pot/motor's max/min move positions. i was thinking, crank pwm to 255, check every 10 milliseconds to see if the new position is the same as position from 10ms ago. if it is, that is my max position. then do the same thing for finding the min position.
[01:48:11] <MarkX> is there a more elegant way to do this rather than force the armature to hit a hard stop i have in place?
[01:48:14] <z64555> hm, there's also some tricks with the series/parallel/mixed winding wiring
[01:48:42] <MarkX> this is not a big armature by any means but just for my learning, any suggestions what i can read up on for this?
[01:48:51] <z64555> but since you have that simple motor, I don't think that's possible
[01:49:30] <MarkX> z64555: i put the pulley system in to prevent stall. looks like i might need to grease it up a bit so that the pulley actually slips
[01:49:37] <MarkX> rather than stalling the motor
[01:50:14] <MarkX> ABS was probably not the best material for they pulley though, little to no slipping >_>
[01:50:30] <Triffid_Hunter> MarkX: how many milliseconds will it take for your motor to start spinning and take up slop in the system? what if you grease your pulley to the point where it slips even with light loads that the motor could handle just fine? what happens when the grease inevitably runs out?
[01:50:33] <z64555> there might be a hackaday blog or something where somebody went through this
[01:51:04] <Triffid_Hunter> MarkX: I'd say put a current sensor in the +ve of your motor driver, look for excessive current over several dozen ms, and kill the drive if found
[01:51:26] <z64555> To do limit stops, I'd reduce the voltage to the motor so that it doesn't over-volt from stalling at limts
[01:51:41] <Triffid_Hunter> MarkX: it takes far more than a couple hundred ms for the windings to start burning, their thermal mass is moderately significant especially as they're tightly coupled to the rotor armature
[01:51:45] <z64555> once you got those calibrated you could remove the speed limit
[01:52:12] <Triffid_Hunter> z64555: voltage isn't the problem, current is the problem. if you drive a brushed DC motor with constant current, it'll never burn when stalled
[01:52:21] <z64555> doh, right
[01:52:47] <z64555> P_loss = I^2 R, after all
[01:52:56] <Triffid_Hunter> yep precisely
[01:54:17] <MarkX> so if i take a resistor of a known value, connect it to the +ve of the motor and then connect the other side to ADC
[01:54:23] <MarkX> i can calculate current right?
[01:54:53] <Triffid_Hunter> MarkX: if you do that, you'll blow up your ADC. Also your motor will be wimpy weak if you use a large enough resistor that an ADC can sense anything useful through a divider
[01:56:04] <MarkX> damn, this is becoming complicated then
[01:58:13] * MarkX should have paid more attention in school
[01:58:19] <MarkX> who knew shunt resistors would actually come in handy
[01:58:29] <z64555> 1 ohm shunt resistor :D
[01:58:48] <Triffid_Hunter> MarkX: if you want to run direct to your ADC, use low side sense.. if your ADC is on an atmega, set the ADC to use the internal 1.1v reference, then you have approximately 1lsb = 1mV.. a 50mR sense resistor should then be adequate for picking up current spikes, but not so great for fine current sense
[01:59:02] <Triffid_Hunter> z64555: 1 ohm? lol too big :P
[01:59:06] <z64555> rats
[01:59:41] <z64555> IIRC some uC's have internal resistors that you could switch on/off.
[01:59:49] <Triffid_Hunter> MarkX: with 50mR and 1.1v reference, 1lsb is approx 50mA, so expect +/-300mA or so of noise
[02:00:03] * z64555 is unhelpful
[02:00:06] <Triffid_Hunter> z64555: lol, you wanna push motor current through a uC's internal resistor? great way to make a voltage to fire converter :P
[02:00:13] <MarkX> lmao
[02:00:22] <Triffid_Hunter> fwiw, internal resistors are usually implemented as fets with a specific gate voltage
[02:01:01] <Triffid_Hunter> they're far smaller than actual resistors
[02:01:40] <MarkX> i could put an opamp in
[02:01:57] <MarkX> but that would have to wait for the next PCB version
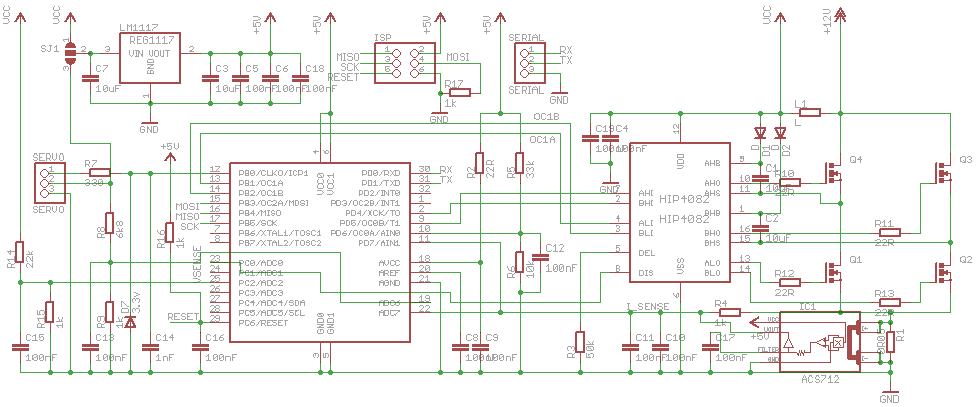
[02:02:17] <Triffid_Hunter> MarkX: in
http://triffid-hunter.no-ip.info/esc_sch.png I use a 50mR shunt direct into the ADC
[02:02:21] <MarkX> not too bad because i learned a few weeks ago i can run all my motors off 1 timer rather than the 3 O was planning to use
[02:02:41] <Triffid_Hunter> only problem was the shunt kept catching fire because I was pushing 15-20A through it
[02:02:53] <MarkX> oh wow
[02:03:08] <z64555> only 20A, lol
[02:03:16] <MarkX> shoot i don't know if i would get that high of an amount. i should measure this
[02:03:34] <Triffid_Hunter> http://imgur.com/a/IDQ5u is the board if you're curious ;)
[02:03:46] <MarkX> the 1000mAh lipo is 20 to 30C
[02:03:52] <Triffid_Hunter> MarkX: measure DC resistance of the motor, apply ohms to find stall current given your supply voltage
[02:05:53] <MarkX> dang, can't get any tools right now. grandma is sleeping in the room with all my equipment
[02:06:11] <z64555> Why did you house your grandma in the garage?
[02:06:14] <MarkX> and by all my equipment i mean my 15$ multimeter, breadboard and some wires/parts
[02:06:28] <MarkX> it's a long story :P
[02:06:46] <MarkX> okay so basically for the next version i need current sensing
[02:08:07] <MarkX> so with the current sensing, i can also use that to calibrate to figure out my max and min as well
[02:11:35] <Triffid_Hunter> MarkX: sure, motor current will be moderate as long as it's not stalled. when it stalls the current will shoot up to ludicrous, and you'd better cut drive power pretty quick or something will burn
[02:11:58] <Triffid_Hunter> MarkX: put a lightbulb in series while you're testing, they're PTC so they'll allow your motor to run full power but limit current if it stalls
[02:12:12] <Triffid_Hunter> also it'll provide a visual indicator that your protection is failing :P
[02:12:45] <MarkX> okay cool
[02:13:05] <MarkX> actually i would like to get some actual readings from this setup.
[02:13:32] <Triffid_Hunter> be aware that multimeters are completely useless at picking up spikes or noisy readings
[02:13:38] <MarkX> i don't even know how much current this motor draws to actually rotate once i have the load (armature) attached to it
[02:14:05] <MarkX> yep that's where i get kind of screwed, will need a scope
[02:14:11] <MarkX> maybe a surplus store around me has one
[02:14:41] <Triffid_Hunter> MarkX: if you can afford new, ds1054Z is apparently the best bang for buck
[02:15:42] <MarkX> wish i could go to the local hacker space and just pay by the hour or by the day
[02:16:49] <MarkX> Triffid_Hunter: thanks for the suggestion, i'll try and see if i can buy it once i get back to work
[02:31:36] <MarkX> hmmm
[02:32:07] <MarkX> maybe a brushless dc motor would have been a better choice
[02:32:55] <MarkX> the potentiometer provides enough resistance that the armature doesn't drop
[02:34:40] <MarkX> crap i really didn't want to redesign everything
[02:35:30] <MarkX> but with the BLDC i could get proper s-curve motion profile as well
[02:36:11] <Triffid_Hunter> MarkX: BLDC has same problem, plus they're a lot more difficult to drive
[02:36:35] <MarkX> oh really?
[02:36:50] <MarkX> hmm
[02:36:55] <MarkX> okay i won't reinvent the wheel
[02:37:05] <MarkX> i'll try and get this wheel working first then i can worry about wheel v2
[02:37:51] <MarkX> for now, i'm going to implement the max/min calibrator
[02:38:30] <Triffid_Hunter> MarkX: BLDC is actually a synchronous 3-phase AC motor
[02:39:35] <Triffid_Hunter> so you have to commutate electronically and use either back-EMF sensing or rotor position sensing to know when to commutate.. like brushed DC they will also have insanely high current when stalled if you don't current sense, but the current may be vastly higher as they're usually optimised for extremely low winding resistance
[02:40:32] <MarkX> i see
[02:40:42] <MarkX> for now, am i safe for stalling for 10ms?
[02:41:10] <MarkX> and what about at a lower voltage?
[02:41:32] <MarkX> would that alleviate the stall issues a bit?
[02:41:55] <Triffid_Hunter> MarkX: 10ms is tiny, you'd be safe at 300ms
[02:42:09] <MarkX> okay cool
[02:42:54] <MarkX> thanks for all the help Triffid_Hunter appreciate it
[02:44:19] <Triffid_Hunter> MarkX: measure the DC resistance of your motor, then use ohm's to work out the voltage that pushes the motor's max current
[02:44:31] <Triffid_Hunter> MarkX: I'm quite certain that the motor will be pathetically weak at that voltage :P
[02:44:53] <Triffid_Hunter> this is where constant current drive comes in handy.. it lifts the voltage when the motor is operating normally, and reduces it when the motor is struggling or stalled
[02:45:27] <Triffid_Hunter> plenty of LED constant current drivers out there ;) just make sure to use a flyback diode or you'll blow something up
[02:45:48] <MarkX> i will add it to my todo list for v2
[02:46:07] <MarkX> right now i've been sitting on this v1 for months and months with little to no progress cause the programming is so daunting to me
[02:46:27] <MarkX> i wanna get it to at least a working state, then i can refine it to be better
[02:47:27] <MarkX> hmm apparently the motor driver i'm using has built in over current protection
[02:48:16] <Triffid_Hunter> bingo
[02:48:29] <Triffid_Hunter> but can you set the limit? does that protect the motor, or just the driver itself?
[02:48:39] <Triffid_Hunter> usually it's only to protect the driver
[02:49:20] <MarkX> reading data sheet now
[02:49:23] <MarkX> https://www.pololu.com/file/0J570/drv8835.pdf
[02:50:27] <z64555> probably just the driver
[02:51:00] <MarkX> Overcurrent conditions on both high and low side devices; i.e., a short to ground, supply, or across the motor
[02:51:00] <MarkX> winding will all result in an overcurrent shutdown.
[02:51:59] <z64555> So its to protect itself
[02:52:10] <z64555> a short across the motor winding means the motor's ded
[02:52:15] <MarkX> it will disable all its fets
[02:52:47] <z64555> can't blame em, much easier to rebuild a motor than it is to break out the electron microscope
[02:52:48] <Triffid_Hunter> MarkX: that's mostly to protect the driver against output short to rail.. it might protect the motor in stall, it might not
[02:53:34] <MarkX> well i just smelled the motor after i stalled it for a few seconds before i asked my original question
[02:53:41] <MarkX> it smells like burning
[02:53:56] <MarkX> so for now i think it's safe to say the driver protects itself
[03:16:25] <anonnumberanon> Triffid_Hunter, I like your RC car PCM design.
[03:16:54] <Triffid_Hunter> anonnumberanon: you mean PCB?
[03:17:16] <anonnumberanon> Powertrain Control Module
[03:18:07] <anonnumberanon> Which is what you have, an all-encompassing circuit that runs the car.
[03:19:21] <Triffid_Hunter> anonnumberanon: ah ok, haven't seen that terminology before
[03:19:25] * z64555 wonders whats up with his irc connection
[03:19:30] <Triffid_Hunter> anonnumberanon: I see PCM I think pulse-code modulation
[03:19:36] <z64555> yes
[03:20:08] <Triffid_Hunter> anonnumberanon: it's not really all encompassing, it's just a motor driver.. put servo signal in one end, get motor drive out the other
[03:20:21] <Triffid_Hunter> servo signal still has to come from some other micro, or a radio or something
[03:22:22] <anonnumberanon> You mean, servo and throttle?
[03:23:04] <z64555> throttle is just another servo :P
[03:23:12] <anonnumberanon> nope
[03:23:29] <anonnumberanon> with an electric motor it's not
[03:23:38] <anonnumberanon> if it was gas then yeah I guess
[03:23:54] <anonnumberanon> if it was guess then yeah I gas
[03:24:00] <anonnumberanon> oops
[03:24:36] <z64555> lol.
[03:25:59] <Triffid_Hunter> anonnumberanon: eh? throttle signal is a servo signal
[03:26:43] <anonnumberanon> Depends. That is true if you are using a radio. Because of the intrinsic properties of transmitting signals via radio.
[03:27:00] <anonnumberanon> Wait.
[03:27:13] <anonnumberanon> I'm sending integers through my radio...
[03:27:17] <anonnumberanon> I must be tired.
[03:27:25] <z64555> :)
[03:28:08] <z64555> A throttle signal is the same signal format as a servo's. But, instead of angular position that you're controlling, it's % Max engine power or speed
[03:28:32] <z64555> (max power for gas, max speed for electric)
[03:28:35] <anonnumberanon> For the hobbyist RC stuff, I concur.
[03:29:01] <anonnumberanon> For my case I just send integers over 2.4Ghz radio chips.
[03:29:19] <Triffid_Hunter> z64555: with my controller it's power because there's no speed sense
[03:29:30] <anonnumberanon> Wanted to do it from scratch so I did it that way.
[03:30:00] <z64555> huh.
[03:41:18] <anonnumberanon> mesmerizing:
http://www.sorting-algorithms.com/
[03:42:31] <deshipu> no timsort :(
[03:42:48] <anonnumberanon> Never heard of that one.
[03:44:04] <deshipu> it's the one used in Python, and recently also in Java
[03:47:16] <z64555> Timsort? That the one where it copies the contents and emails it to Tim, so he can sort it?
[03:47:27] <z64555> good guy Tim.
[03:58:35] <z64555> nah, trying to setup an IDE or toolchain to work with this LM4F120 that I have
[03:59:06] <z64555> All of TI's suggested tools are windows. At one point they had a link to a linux style toolchain but, uh.
[03:59:24] <z64555> mingw-get doesn't have half the libraries it needs
[03:59:34] <anonnumberanon> THey don't even use arm-gcc within their stuff?
[04:00:01] <z64555> you can, I remember seeing a tutorial on it somewhere
[04:00:05] <z64555> (lost the link, tho)
[04:00:06] <deshipu> be happy it's not PIC
[04:00:35] <z64555> lol, I honestly have no clue how my dad managed to work with PIC's
[04:00:53] <z64555> he might've done his programs in assembler
[04:01:14] <deshipu> it's funny how all those platforms that even run Linux require Windows for the tooling
[04:01:44] <deshipu> it's like "no, don't take away our binary blobs"
[04:01:53] <z64555> gotta start somewhere, I guess
[04:02:29] <z64555> Easier than trying to make a bootstrap compiler
[04:02:39] <deshipu> in the end the more open platforms will just be more popular, even if technically worse
[04:02:43] <z64555> That's one thing I'm not going to make a hobby of, lol
[04:07:49] <z64555> ok, so. Example code's built, now to figure out how to flash it onto the thing and run it
[04:08:23] <deshipu> openocd?
[04:08:47] <deshipu> plus a matching version of gdb
[04:11:42] <z64555> currently messing with code composer studio, which is supposedly based on eclipse
[04:11:49] <anonnumberanon> z64555, listening to Tron may help right now
[04:11:53] <z64555> heh
[04:12:48] <z64555> I have spotify :)
[04:24:00] <anonnumberanon> z64555, btw it's 5am what are you doing still up?
[04:24:09] * anonnumberanon stares at himself
[04:25:28] <deshipu> that's a neat trick, i have to learn that
[04:25:48] <z64555> trying to remember that I'm not 18 anymore and should stop this staying up all night working on projects :P
[04:28:31] <anonnumberanon> Elon Musk would frown at that statement.
[04:44:15] <z64555> hm.
[04:44:41] <z64555> So, when coding the proccess routine for PID's, I noted that you could apply the gain before or after the accumulator
[04:45:44] <z64555> applying the gain before the value is added to the accumulator means less worry of saturation (for gains of abs value < 1)
[04:45:53] <z64555> but is less precise
[04:46:45] <z64555> saturation's not that big of a deal with float, but it is with fixed
[04:47:25] <z64555> letsee what else
[04:48:31] <z64555> trying to come up with a communiication protocal to use between the bot and the command station
[04:49:24] <z64555> current idea is to borrow from assembler and java
[04:49:44] <z64555> first byte is the command, following bytes are arguments
[05:06:58] <z64555> and now I'm wondering why I'm making a "tx_send_servo()" function prototype
[05:07:22] <z64555> swarm bot control, perhaps?
[05:07:40] <deshipu> or you could use the dynamixel protocol
[05:11:57] <anonnumberanon> And here I thought by bot you meant your quadcopter.
[05:12:10] <z64555> I did :)
[05:12:20] <z64555> aerobot
[05:12:37] <z64555> airbot, or whatever fancy hipster term you want to call it
[05:12:54] <z64555> I call it AirDragon
[05:13:09] <z64555> as its proper name
[05:13:16] <MarkX> airdragon, damn that's fancy
[05:13:35] <anonnumberanon> That reminds me of Air Force drones.
[05:14:18] <z64555> Yeah, I was trying to stick to the dragon theme, since the dev board I was using at the time was the MiniDragon+
[05:14:53] <z64555> when I was thinking of a name for the OS, I went with BloodDragon, until a game stole the idea
[05:15:19] <z64555> well, not stole, but got rights to before I did. :P
[05:15:20] <MarkX> z64555: got any kind of project log showing updates?
[05:15:52] <z64555> nothing particularly interesting.
[05:16:19] <z64555> My facebook page has some blog entries pertaining to it, but the last meaningful update was years ago
[05:17:03] <MarkX> ah gotcha
[05:20:00] <z64555> Here's a few pics I uploaded with a crappy camera:
https://www.facebook.com/media/set/?set=a.200693593329427.52249.100001663622594&type=1&l=03776a3659
[05:21:52] <deshipu> a lizard with ears?
[05:21:58] <z64555> about the only electronics related tech I used during the whole project was making the voltage regulator board. lol
[05:23:06] <z64555> lizards have ears
[05:23:32] <MarkX> love that sketch
[05:23:33] <MarkX> haha
[05:23:38] <z64555> thanks
[05:23:42] <MarkX> :)
[05:23:45] <deshipu> z64555: they don't have ear lobes
[05:24:07] <z64555> they do have ear flaps
[05:24:19] <deshipu> pics?
[05:24:30] <MarkX> neat project
[05:24:34] <z64555> probably not anatomically correct, but hey, this is a mythological being we're talking about
[05:24:36] <MarkX> was the board your own design?
[05:24:49] <MarkX> oh wait nvm you said you had a minidragon+
[05:25:23] <z64555> MarkX: the controller board is a minidragon+, a microdragon board is also shown
[05:25:51] <z64555> the microdragon uses the same chip, but has less on-board hardware
[05:26:12] <z64555> basically just the supporting circuits and some headers
[05:26:51] <MarkX> neat
[05:26:57] <MarkX> now just for my knowledge
[05:27:16] <MarkX> why are you going for a custom drone design?
[05:27:41] <MarkX> i mean are you trying to build it up from scratch? or learn about sensors and stuff?
[05:27:56] <MarkX> just curious what there is in the drone world as i've never even flown one of those yet
[05:28:18] <deshipu> start with one of those cheap chinese ones
[05:28:26] <z64555> learning about building one from scratch, with some off-the-shelf hardware to help things along
[05:28:39] <deshipu> many people think they are going to just build and fly one, as their first
[05:28:43] <deshipu> which doesn't work
[05:29:09] <z64555> there's many considerations that come into play, that's part of the reason I'm continuing the project as it is
[05:29:24] <z64555> When we first started making it, quadcopter frames were not commercially available
[05:29:59] <deshipu> 1. get an off-the-shelf one and learn to fly, 2. mod the hell out of it and learn what modifications cause what, 3. design your own :)
[05:30:11] <deshipu> that applies to everything, not just quadcopters
[05:30:13] <z64555> that's cheating :P
[05:31:15] <z64555> nah, I've already gone through the core physics models and controller theory. Hardware's just waiting for software
[05:32:22] <anonnumberanon> we did none of that with my team lol
[05:32:39] <anonnumberanon> these bastards were supposed to do a lot of research and never did it
[05:33:42] <z64555> our team consisted of me, and one other guy
[05:34:06] <z64555> we wanted to take on the hard project
[05:34:19] <anonnumberanon> was just a binome or also a lot of people that didn't do anything?
[05:34:33] <z64555> Nah, this was for senior projects
[05:34:53] <z64555> letsee... there was a satellite reciever project
[05:34:54] <anonnumberanon> yeah we picked the quadcopter cause hard too
[05:35:20] <z64555> some sort of radio communication project
[05:35:29] <z64555> they used a zigbee for that
[05:35:37] <anonnumberanon> lol WTF
[05:35:49] <anonnumberanon> >plug in chip
[05:35:59] <anonnumberanon> >upload innarnet code
[05:36:00] <anonnumberanon> >done
[05:36:08] <anonnumberanon> >learned nothing
[05:36:18] <z64555> yep, and they still had problems getting it to work. LOL
[05:36:42] <anonnumberanon> bet they got a good grade too that's the best thing
[05:36:44] <MarkX> what was the sat one about?
[05:37:20] <z64555> The satellite project was to make an antenna and hook it up to a radio to recieve some sort of weather image
[05:37:58] <z64555> the project consisted of designing the antenna, and the software to decode the image
[05:38:05] <MarkX> very neat
[05:38:08] <MarkX> did it work out for them>?
[05:38:15] <z64555> yup. splendidly
[05:38:21] <MarkX> very cool good for them
[05:38:33] <z64555> they had the worst variable names, ever.
[05:38:35] <MarkX> i've thought about doing that as well before, kind of a just for fun project
[05:39:17] <z64555> The one successful thing I got from the quadrotor was heaps of respect from the microcontroller professor
[05:39:48] <z64555> he's a short asian-american with years of experiance in the electronics business
[05:40:11] <z64555> a generally bored guy, lol
[05:41:03] <MarkX> haha
[05:41:22] <MarkX> was this electronics engineering in university?
[05:41:31] <z64555> yes
[05:41:43] <MarkX> right on
[05:41:43] <MarkX> nice
[05:48:43] <z64555> hm, how's this for a packet
[05:49:28] <z64555> <destination_id> <sender_id> <msg_size> <cmd> [arg1] [arg2] [...]
[05:50:07] <z64555> not particularly secure, but, yeah
[06:03:44] <z64555> hm, I supposed I could buy a cheap frame to work with. It'll be less customizable, but since I don't have as many tools available to me at the moment that's kinda moot
[08:34:23] <MarkX> wooo
[08:34:29] <MarkX> got max/min detection working
[08:34:55] <MarkX> cleaned the code up a lot too
[08:35:01] <MarkX> now on to the daunting motion profiles
[08:43:15] <joga> MarkX, what are you working on?
[08:48:08] <MarkX_> joga: just a basic learning exercise. took a dc motor, strapped it to a potentiometer + an armature with a rubber band
[08:48:15] <MarkX_> made a pcb for it
[08:48:31] <MarkX_> now i'm trying to make the armature go to my desired positions
[08:48:59] <MarkX_> basically want to end with moveTo(newPos)
[09:15:33] <rue_house> MarkX, BVH
[09:16:30] <rue_house> which is a bit overkill, but...
[09:18:17] <MarkX> BVH?
[09:19:01] <MarkX> motion capture?
[09:23:50] <rue_house> sure
[09:24:29] <rue_house> cheat the tree definiton and use it to store position values
[09:25:09] <rue_house> I have a bvh library that will read anything, but you probably dont want it as everyone wants to write their own code
[09:25:48] <MarkX> that is definitely overkill
[09:25:51] <flyback> eh-hole
[09:25:55] <MarkX> very interesting though
[09:26:27] <MarkX> i'm finding the basic trapezoidal motion profile daunting as it is, after that i want to move to the s-curve. then hopefully get proper PID going.
[09:26:38] <MarkX> i feel that is a better progression in terms of learning for me
[09:26:52] <rue_house> mmm interpolator
[09:27:20] <MarkX> ?
[09:27:52] <rue_house> generating the points between your points
[09:28:06] <MarkX> is that what you are calling my method of learning?
[09:28:15] <MarkX> or is that a hint for trapezoidal motion profiles?
[09:28:15] <MarkX> :P
[09:28:16] <rue_house> I should work a velocity engine into mine sometime
[09:29:06] <rue_house> what is daunting about a trapazoidal motion profile?
[09:30:04] <rue_house> I presume your given accel and decel limits
[09:30:10] <rue_house> and a velocity limit
[09:30:37] <MarkX> damn internet
{kind=link}