Back
[02:33:37] <theBear> rue_house, point them at your discoball, OBVIOUSLY <wink>
[02:34:28] <theBear> same answer fer yer 1-6rpm syncro motors
[02:35:06] <theBear> oh, wait, i mean attach fer the motors, pointing won't work.... motors do not work that way !
[02:51:35] <rue_shop3> theBear, dude, that question was like 3 days old...
[02:51:43] <rue_shop3> its amazing I know what your talking about :)
[03:09:01] <theBear> you're a pretty amazing kinda guy :-)
[03:10:24] <theBear> for some reason an uncannily large % of the EEEpc's i seen over the years (you know, a fiddle here, a reinstall there,) seem to be of french or at least .eu origin.... weird
[03:12:25] <theBear> and i can't believe they still sell with win7 on them stock... all the fancy "instant on" and "+15% cpu boost" stickers in the world can't possibly fool people about the 5 minutes it takes a low power 1gb(stock, 2gb MAX) ram netbook to start such a silly os
[03:13:03] <theBear> ahh, les anglais button
[03:13:36] <theBear> my french is better now than i think it has ever been, but things like restart and boot priority ain't exactly conversational basics :)
[03:14:20] <theBear> hmm, and whatever i just chose, it stuck on anglais, but everything including that is still francais :)
[03:17:41] <theBear> claviers ? i thought that was somethign musical, that i also should remember
[03:19:24] <theBear> clavier, some kinda percussion something hmm
[03:19:41] <theBear> either way doesn't seem to set a computer to talk english :)
[03:21:52] <Jak_o_Shadows> I wanna set win 10 to esperanto
[03:30:01] <theBear> umm, good for you ?
[03:30:35] <theBear> as i recall it's much easier if you good at the language you trying to escape :)
[03:30:46] <Jak_o_Shadows> haha.
[03:30:50] <Jak_o_Shadows> Yeah, probably
[03:31:24] <theBear> gaar, damned crazy euro keyboard, numbers are sposed to be easy to type
[03:32:01] <theBear> actually i think this is a french keyboard, not sure i seen that before
[03:32:36] <theBear> qwerty + some fancies like the old c with a 5 attached tot he bottom and various apostrophe-above-e letters :)
[03:36:17] <Jak_o_Shadows> You know, we really don't utilise our keyboards enough
[03:36:24] <Jak_o_Shadows> We coul d have so many other function keys
[03:39:12] <theBear> i know, i experimented a little over the years, but it takes a lotta time and makes normal keyboards painful to use
[03:43:06] <Jak_o_Shadows> I have a neat one on my smartphone
[03:43:24] <Jak_o_Shadows> Hold and swipe down for symbols
[03:56:51] <SpeedEvil> At times, I have considered that it might be a good idea to make a 3d printed open-source keyboard.
[03:57:00] <SpeedEvil> Simply as it can't be discontinued on me.
[04:01:52] <Jak_o_Shadows> Would you buy the key mechanisms (Cherry XX's) or use your own type of switch?
[04:03:52] <deshipu> SpeedEvil: why 3d printed?
[04:04:11] <SpeedEvil> Keycaps
[04:04:12] <deshipu> SpeedEvil: laser cutting is much better
[04:04:29] <deshipu> SpeedEvil: eww, 3d-printed keycaps are horrible
[04:04:38] <deshipu> SpeedEvil: injection moulding ftw
[04:04:39] <SpeedEvil> that depends on the 3d printer
[04:04:52] <deshipu> SpeedEvil: you can 3d-print the mould
[04:05:11] <deshipu> SpeedEvil: and cast the keys from aluminium ;)
[04:05:19] <Jak_o_Shadows> horrible with my printer at the moment :P
[04:05:25] <SpeedEvil> I have a glass printer on my todo list :)
[04:05:37] <SpeedEvil> And metal.
[04:05:38] <deshipu> full glass keyboard would be cool
[04:06:17] <SpeedEvil> E-beam printer. With the 'Caution: X-rays' light
[04:06:36] <deshipu> ceramic keycaps could be cool too
[05:16:01] <LiohAu> I have a motor with a speed around 6000 RPM, I need to reduce its speed to 120 RPM
[05:16:21] <LiohAu> the motor is parallel to the axis it drives
[05:16:33] <LiohAu> so I cannot direct drive
[05:17:31] <LiohAu> I'm wondering which solution would be the most efficient and would add the less backlash
[05:18:39] <Jak_o_Shadows> A gearbox? Just normal spur gears?
[05:19:03] <Jak_o_Shadows> I'm thinking you'd want 4 gears on two shafts at least - just two gears would probably make your driven gear too big.
[05:19:31] <LiohAu> Jak_o_Shadows I have excluded gears
[05:19:37] <LiohAu> I prefer pulleys
[05:20:18] <LiohAu> but my problem is that I need to stack 2 mechanism
[05:20:27] <LiohAu> because the motor is not in the axis of the shaft
[05:20:34] <Jak_o_Shadows> Well, first of all why, but second, that would still technically work.
[05:20:52] <Jak_o_Shadows> The motor shaft is parallel to the driven hsaft?
[05:20:57] <LiohAu> yes
[05:21:25] <LiohAu> so in all the cases I have to use belt/pulley (or gears, but I excluded that way)
[05:23:06] <LiohAu> but the biggest pulley I found has 60 teeth, and the smallest 15 teeth
[05:23:38] <LiohAu> so I get 1:4 while I need 1:50 ...
[05:24:19] <Jak_o_Shadows> You'll want more than two gears.
[05:24:29] <Jak_o_Shadows> If you put gears on the same shaft, they rotate the same amount.
[05:24:34] <Jak_o_Shadows> But they can be different sizes.
[05:24:57] <Jak_o_Shadows> Albeit if you're limited to 1:4, you'll need a lot of them to get your 1:50
[05:25:10] <LiohAu> well I need 3 pairs of pulleys
[05:25:45] <SpeedEvil> planetary gear can be an option
[05:25:48] <Jak_o_Shadows> Again, why not geras? Won't the stretchniess of belts/pulleys cause more backlash?
[05:25:50] <LiohAu> maybe it adds more backlash than using 1 pair of pulleys + planetary reducer
[05:26:00] <SpeedEvil> Jak_o_Shadows: belts vary
[05:26:09] <SpeedEvil> Jak_o_Shadows: for example, you get nice CF cored belts
[05:26:17] <LiohAu> I'm going on GT belt (2GT if posssible)
[05:27:03] <Jak_o_Shadows> Yeah, but as gears would be a nice simple solution. 1:15+ isn't impossible with gears.
[05:27:16] <Jak_o_Shadows> Also, I probably have the scale of this thing in my head wrong
[05:28:33] <LiohAu> Jak_o_Shadows : noise, needs to lubricate and needs more accuracy when machining parts
[05:28:47] <LiohAu> that's why i'm excluding gears
[05:30:57] <SpeedEvil> http://www.aliexpress.com/item/2pcs-1pair-DIY-Motor-for-2-Wheels-8-inch-8-Smart-Self-Balancing-Electric-Unicycle-Scooter/32596302582.html?ws_ab_test=searchweb201556_1,searchweb201644_1_505_506_503_504_301_502_10001_10002_10016_10005_10006_10003_10004,searchweb201560_8,searchweb1451318400_-1,searchweb1451318411_6448&btsid=60b11641-1f2d-4cd8-8832-8adaaf51ef90
[05:31:47] <LiohAu> anyway, to keep it simple, my options are : 2 pulley (smallest and biggest) + planetary reducer on the motor vs 3 pulley/pair vs 1:50 planetary reducer + 2 identical pulley
[05:32:14] <SpeedEvil> You have to use the motor you've chosen?
[05:32:55] <SpeedEvil> I wish I could get some of those impounded hoverboards
[05:32:58] <LiohAu> SpeedEvil if possible I would like to use the same everywhere to reduce the price.
[05:34:25] <LiohAu> so I know that planetary gearbox adds backlash
[05:34:37] <LiohAu> I don't know about pulley/belt
[05:35:26] <SpeedEvil> it depends on the profile and the setup
[05:35:56] <LiohAu> profile of the pulley? 2GT pulleys
[05:38:11] <LiohAu> well nevermind that topic, i'll post on
http://engineering.stackexchange.com/
[06:07:05] <theBear> note re: ealier... claviers is a keyboard, i'm dumb and it didn't have 2 meanings... heck, i think it even works in a few other languages... coudl swear i seen ancient old deuthsey-language brand keyboards with it in big fat letters on the back
[06:07:33] <theBear> i used to be a god at that game (spy a few sq in of the side or rear of a random musical related anything and know what it was)
[10:40:56] <pokmo> with
https://mdmetric.com/Ch6.8wGO.pdf, various fit classes are specified, e.g., H7/g6, H8/f7, etc. but why use these fit classes when the nominal sizes of holes and shafts are already specified on drawing sheets
[10:42:34] <pokmo> couldn't one just follow the nominal sizes
[10:54:56] <benji> hey there folks :D
[10:55:05] <benji> #join android
[11:41:48] <Guest10911> soo...
[11:41:53] <Guest10911> how is the weekend going folks
[11:45:10] <rue_house> I just woke up
[12:04:43] <Guest10911> anyone knows good sources for SLAM on ros?
[12:04:56] <rue_house> we dont use ros
[12:07:06] <rue_house> my cat is gonna invent antigravity so she can walk across the cieling to get that spider!
[12:07:10] <veverak> you don't use ros :P
[12:07:12] <veverak> ;)
[12:07:39] <rue_house> hehe, I'm a good troll
[12:14:18] <Guest10911> why not ros :O
[12:14:34] <Guest10911> ros + gazebo = love?
[12:16:37] <theBear> ros is a ladyname
[12:17:03] <theBear> sidenote: i have no idea what a bigletter slam, or a ros is
[12:17:26] <theBear> unless my 3rdgrade teacher is into some kinda M.M.A. deal
[12:22:37] <Guest10911> not trolling?
[12:22:57] <Guest10911> Ros = robot operating system
[12:23:20] <Guest10911> it's a good tool indeed, to make multiple platforms be supported even if written in different languajes
[12:23:57] <Guest10911> Gazebo is a simulator
[12:25:11] <theBear> not trolling, but also not helping :-)
[12:25:36] <Guest10911> yeah nevermind, I got some answers online anyways
[12:25:48] <theBear> trolling is an art, my bad one-liners are far from art (not to say i respect trolling, but i appreciate/understand what makes it trolling)
[12:27:02] <theBear> oh, i'm old fashioned and slow to accept new and/or popular things, plus the robot-ey stuff i built so far is simple enough to suit non rtos/true-multitask/kernel approaches to programming more than fancy robot or otherwise os based approaches
[12:32:46] <Guest10911> oooh I see
[12:32:56] <Guest10911> any cool ones you can show?
[13:13:47] <Guest10911> so this place seems to be dessertic xD
[13:25:06] <deshipu> nah
[13:25:18] <deshipu> depends on the day and the time
[13:25:25] <veverak> yep
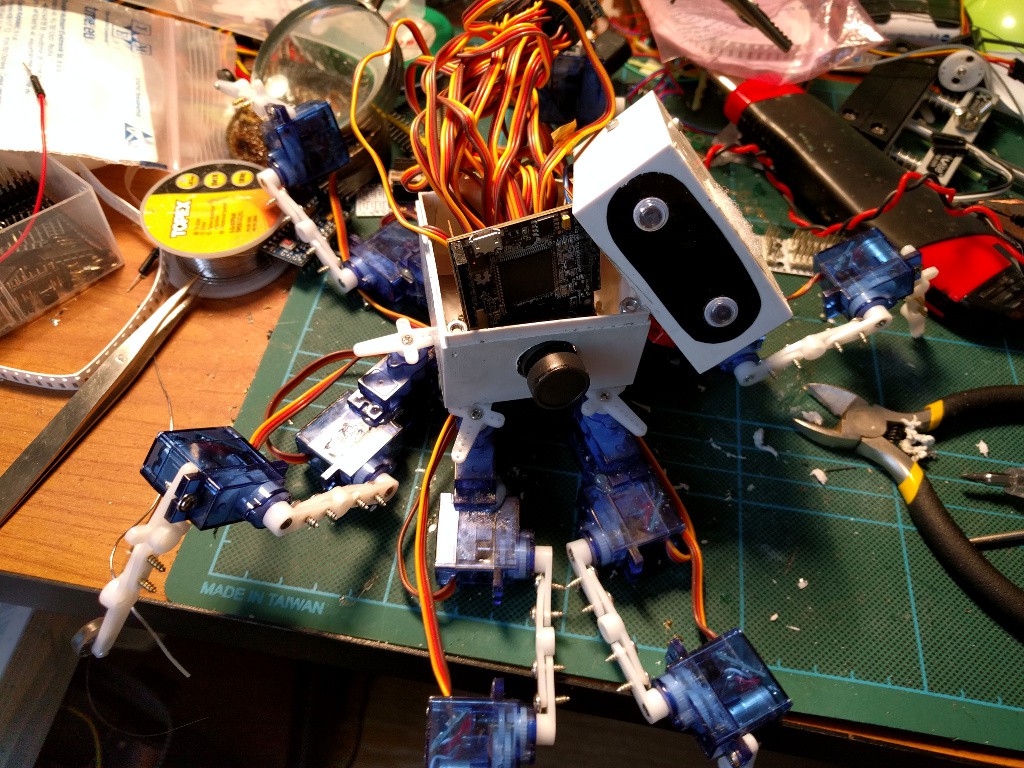
[13:25:54] <deshipu> current status:
https://cdn.hackaday.io/images/2299901455367858580.jpg
[13:26:18] <deshipu> installing openmv in a hexapod
[13:28:15] <akem> whatup deshipu
[13:30:52] <deshipu> akem: ^^
[13:32:13] <akem> that'$ the .jp smiley, i can recogn it anywhere any day of the year deshipu
[13:32:21] <Guest10911> so when is a good time?
[13:32:35] <deshipu> akem: sorry, I meant ↑
[13:32:44] <deshipu> Guest10911: it's kinda random
[13:32:48] <deshipu> Guest10911: just lurk around
[13:33:21] <Guest10911> lurking around is my speciality
[13:33:42] <akem> the bomb, deshipu
[13:34:23] <deshipu> akem: set us up it
[13:37:16] <akem> deshipu i could, do not underestimate the power of the atomic energy! i'm waiting for components and a new Android device
[13:37:18] <veverak> nice :)
[13:37:27] <veverak> deshipu: can't we make "arms" between two servos from PCB ?
[13:37:36] * veverak got that idea in head for a while
[13:38:20] <deshipu> veverak: possible, but expensive
[13:38:32] <deshipu> veverak: also, not as flexible as the plastic horns
[13:38:32] <veverak> even with dirtycheap pcb?
[13:38:52] <veverak> not as flexible but estetic part seems much better if you ask me
[13:38:54] <veverak> :)
[13:38:55] <deshipu> veverak: 10 5x5cm boards cost $14
[13:39:13] <veverak> hmm
[13:39:24] <deshipu> veverak: I think you could laser-cut from acrylic for cheaper
[13:39:56] <veverak> propably
[13:40:01] <veverak> deshipu: generally
[13:40:08] <deshipu> and it looks better :)
[13:40:08] <veverak> I thought that for entire robot
[13:40:24] <veverak> there could be one pcb with multiple parts (connected with thing bridges)
[13:40:31] <veverak> that could look ultrawesome :D
[13:41:23] <deshipu> I guess if you are making a bigger board and have some room left
[13:41:33] <deshipu> you could also have pads/holes for sensors
[13:41:36] <deshipu> or LEDs
[13:41:39] <veverak> yeah
[13:41:41] <veverak> :)
[13:42:18] <deshipu> but pcb is really an expensive material
[13:42:35] <veverak> hmm
[13:42:37] <veverak> yeah
[13:42:41] <veverak> but if it's partially ment for sensors
[13:42:48] <veverak> can make things much cleaner
[13:43:01] * veverak just likes the idea of PCB being construction element ....
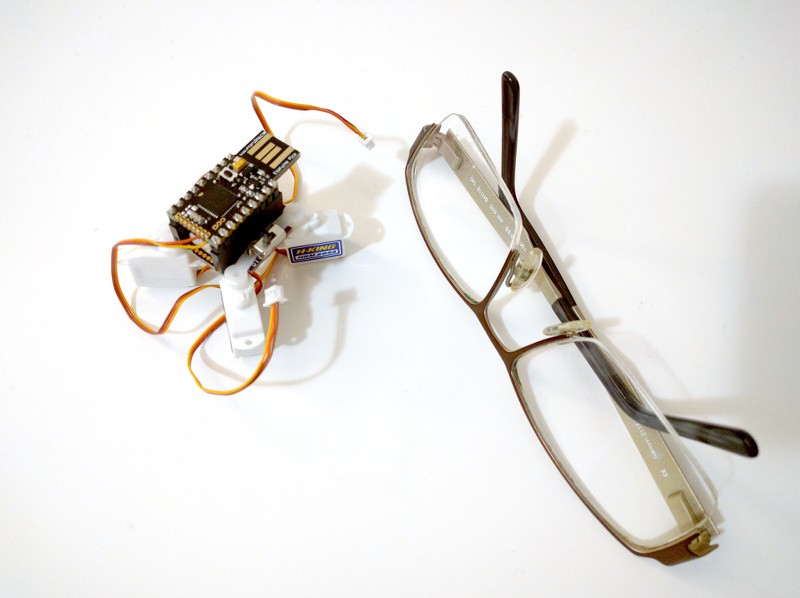
[13:43:34] <deshipu> if you made the robots smaller
[13:44:22] <deshipu> https://cdn.hackaday.io/images/5001631452983091122.jpg
[13:44:30] <deshipu> I'm slowly working on this one
[13:44:33] <veverak> :)))
[13:44:36] <veverak> looks awesome
[13:44:53] <deshipu> the pcb is one square inch
[13:45:32] <deshipu> which leaves some room on the 5x5cm board for other elements
[13:46:18] <veverak> :)
[14:24:18] <flyback> got another cheap used monitor at consignment store 17 inch dell for $17 so far seems ok, last one I got nec 15 inch for $10 had a minor row of blue line bad column driver but don't care, beats using a vga to tv adaptor on a old tv that is unreadable or trying to move around the old crt
[14:28:49] <deshipu> yeah, crts are tricky to mount on a robot
[14:35:56] <veverak> hmm
[14:36:02] <veverak> there should be scale classes for robot
[14:36:06] <veverak> like for model trains
[14:38:52] <z64555> could look at the battlebots weight classes
[14:43:06] <deshipu> veverak: I think that just saying what servos you are using already tells you the scale
[14:43:17] <veverak> :)
[14:46:26] <goppo> hi
[14:46:34] <goppo> suppose the manufacturer for a part can only give a +-0.2MM tolerance, should a shaft/bore with a nominal diameter of 2MM be modelled as 2MM each still?
[14:46:37] <goppo> with 2MM +- 0.2MM, the shaft could end up being 2.2MM and the bore 1.8MM though - right?
[14:46:50] <veverak> yep
[14:47:17] <veverak> but, you should be able to find 2mm shaft with better tolerances
[14:47:19] <veverak> :)
[14:48:04] <pokmo> veverak, but with these tolerances, how is it going to work with 2MM +- 0.2MM specified
[14:48:08] <pokmo> the bore could end up being just 1.8MM
[14:48:22] <goppo> yeah
[14:48:59] <goppo> or should i model the shaft as 2MM +- 0.2MM and the bore as 1.6 +- 0.2MM?
[14:49:32] <veverak> and you can endup with 0.4mm space
[14:49:35] <veverak> which sucks
[14:49:38] <goppo> yeah
[14:49:43] <veverak> again, this tolerances seems awfull for that dimensions
[14:49:46] <veverak> find better source
[14:49:48] <veverak> :)
[14:49:51] <goppo> ok
[14:50:02] <z64555> or bust out the sandpaper?
[14:50:07] <veverak> yeah
[14:50:08] <veverak> that works
[14:50:17] <goppo> say i find something better, how should the shaft/bore sizes be modelled
[14:50:20] <veverak> but good luck with +- 0.02 no both bore and shaft
[14:50:23] <goppo> just use nominals?
[14:50:40] * veverak tends to add +-0.1 from nominals
[14:50:47] <veverak> liiike 1.9 shaft and 2.1 bore
[14:50:57] <veverak> but given that 1.9mm shaft is hard to find -> 2.2 bore
[14:51:04] <veverak> and 2mm shaft
[14:51:12] <veverak> but it depends on usage
[14:51:13] <goppo> veverak, why not H11/c11?
[14:51:14] <veverak> :)
[14:51:28] * veverak is not sure he knows what it means
[14:51:30] <veverak> :)
[14:51:41] <goppo> as in, the clearance fit class
[14:51:58] <veverak> I know that there are clearance fit classes
[14:52:02] <veverak> but that's only thing I know
[14:52:07] <veverak> don't have idea what "11" means
[14:52:08] <goppo> https://mdmetric.com/Ch6.8wGO.pdf
[14:52:21] <goppo> for loose running fits
[14:52:29] <goppo> veverak, what tolerance do you usually deal with?
[14:52:38] <veverak> dunno?
[14:52:45] <veverak> goppo: never checked really because it always worked
[14:52:49] <veverak> 3d printing + local metal shop
[14:52:57] <veverak> but, well, it's industrial city :D
[14:53:05] <goppo> if 0.2MM is high, i wonder what's a reasonable level
[14:53:30] <veverak> again
[14:53:36] <veverak> MAIN QUESTION IS ALWAYS: what's it for?
[14:53:39] <veverak> what do you need?
[14:53:41] <veverak> ...
[14:53:48] <veverak> goppo: this can be reasonable
[14:54:03] <veverak> as also only reasonable for you can be +- 0.001 if you are doing precisison stuff
[14:54:05] <veverak> :)
[14:54:21] <goppo> veverak, well, its for a small part like this where a spring sits on the base pushing up the head of the shaft
https://i.imgur.com/1LiMdIa.png
[14:54:44] <veverak> I suppose some backlash doesn't matter?
[14:54:53] <goppo> yeah, it doesn't matter
[14:55:04] <goppo> i'm just trying to find the right shaft/bore size
[14:55:10] <veverak> I see
[14:55:11] <goppo> without the shaft wobbling
[14:55:16] <veverak> manufacture method?
[14:55:26] <veverak> well, it wobbles always :0
[14:55:27] <veverak> :)
[14:55:28] <goppo> it'll likely be lathe
[14:55:32] <veverak> question is how mutch :D
[14:55:36] <goppo> veverak, well, not too much :)
[14:55:47] <veverak> that's vague but I suppose i understand
[14:55:49] <goppo> 0.2MM hopefully
[14:55:54] <goppo> +- 0.2MM
[14:56:03] <goppo> that's 10% of the diameter of the shaft
[14:56:07] <veverak> depends on your time
[14:56:23] <goppo> the shop i asked said he could do +-0.2MM tolerance
[14:56:34] <veverak> hmm
[14:56:38] <goppo> so i'm trying to draw it up on CAD and hand him the sheet
[14:56:39] <veverak> well
[14:56:43] <veverak> if it's lathe
[14:56:47] <veverak> I would when doing it on lathe
[14:56:57] <veverak> mill the bore best I can
[14:57:12] <veverak> than start milling the shaft, and start let's say on 2.2mm dia
[14:57:20] <veverak> and I would try to attach the bore on it
[14:57:28] <veverak> if doesn't work, remove a little from the shaft
[14:57:33] <veverak> repeat until fits
[14:57:36] <goppo> is lathe just not a good method for this?
[14:57:42] <veverak> no, it's good
[14:57:57] <veverak> goppo: point is, there is method how to on high tolerance lathe
[14:57:58] <goppo> +-0.2MM does seem quite high - right
[14:57:59] <veverak> make tight fit
[14:58:06] <goppo> right
[14:58:08] <veverak> point is, that the person which makes it
[14:58:13] <veverak> has to know it
[14:58:14] <veverak> :D
[14:58:30] <goppo> i'll need quite a few of this
[14:58:44] <goppo> like about 100+
[14:58:44] <veverak> goppo: can you match pairs?
[14:58:48] <veverak> ouch
[14:58:50] <veverak> ok
[14:58:52] <veverak> nevermind
[14:58:54] <veverak> goppo: you are fucked
[14:58:56] <veverak> :D
[14:59:03] <goppo> maybe not lathe then?
[14:59:16] <veverak> if it's low batch
[14:59:24] <goppo> that shop makes screws. maybe that's why they're happy with 0.2MM tolerance
[14:59:29] <veverak> you can always play with it so even with unprecise tools it's quite precise
[14:59:43] <veverak> with 100+ ... nah
[14:59:52] <goppo> CNC?
[14:59:56] <veverak> goppo: well, I would draw what I need
[15:00:03] <veverak> and then send it, and asked
[15:00:06] <goppo> right
[15:00:23] <veverak> "I need to fit those parts, so it doesn't wobble, how good you can be in this case?"
[15:00:32] <veverak> maybe they will be able to make it good enough
[15:00:34] <veverak> also
[15:00:36] <veverak> goppo: lathe can be also CNC
[15:00:38] <veverak> :)
[15:00:45] <goppo> so i should just draw it out and probably use those clearance fit classes?
[15:00:50] <veverak> and there are lathes with much better tolerances than 0.2mm
[15:00:54] <veverak> goppo: yep
[15:01:10] <veverak> also depends on the company
[15:01:15] <veverak> somebody wants perfect drawing
[15:01:30] <veverak> for somebody you can just write it down somehow and they will propably understand the problem
[15:01:39] <veverak> but sometimes they want money to ... "correct drawings"
[15:01:47] <goppo> i wonder if it's a good idea to get a screw company to do it
[15:01:57] <goppo> screws tend to have high tolerances, right?
[15:02:09] <veverak> not really
[15:02:13] <veverak> also ... depends ... :D
[15:02:23] <goppo> X)
[15:02:33] <goppo> a standard M4 screw, say
[15:02:34] <veverak> standart screws are ment to tighten things together
[15:02:43] <veverak> you don't really need high tolerances here
[15:02:55] <veverak> also, there are tools for making screws with low tolerances, which are relatively cheap
[15:03:19] <veverak> on the other hand, if they are able to make 'trapezoidal screws', 'ball screws' which are ment to move things on machines etc...
[15:03:28] <z64555> can't use heavy weight grease on the shaft?
[15:03:30] <goppo> oh, by high tolerance.. i meant low tolerance..
[15:03:40] <veverak> yeah, I understand that :D
[15:03:41] <goppo> i thought high tolerance means += (a high value)
[15:03:57] <veverak> z64555: could make the trick
[15:04:07] <goppo> not sure if that's the industry way of expressing it?
[15:04:18] <veverak> dunno
[15:04:23] * veverak is DIY a lot
[15:04:28] <goppo> heavy weight grease
[15:04:35] <z64555> the grease would help the shaft adhere to the walls of the bore, as well as dampen the wobble a bit
[15:04:36] <veverak> goppo: anyway, draw it, send it to them and explain what and WHY you need it
[15:04:39] <veverak> they should answer you
[15:04:44] <goppo> sure
[15:04:51] <goppo> ok, i'll draw it as it is
[15:04:55] <veverak> also with 100+ batch
[15:05:03] <veverak> you could just match them properly together
[15:05:07] <goppo> probably give them as much tolerance as i can
[15:05:15] <veverak> you will end up with gaussian distribution propably on both shaft and bore
[15:05:17] <goppo> what do you mean?
[15:05:18] <veverak> so it could work :0))
[15:05:25] <goppo> oooh
[15:05:33] <goppo> man.. that'd be tedious :P
[15:05:37] <veverak> :D
[15:05:47] <goppo> i was just hoping you didn't mean what i thought you meant :P
[15:06:41] <veverak> :)
[15:07:21] <goppo> at least, the worst case scenario would need me to make 100 factorial matches...
[15:07:33] <z64555> oy vey
[15:08:45] <goppo> z64555, does that grease help reduce friction too?
[15:10:55] <z64555> Yes, depending on its temperature
[15:11:05] <z64555> colder temperatures, the grease acts like a glue
[15:11:14] * rue_house read "does grease help reproduction" ... gives his head a shake
[15:11:14] <goppo> ouch
[15:12:05] <z64555> so you might want to read up on the operating temperatures of the grease to see if that'll be a problem
[15:12:39] <rue_house> I find if you dont use really high temp grease, it turns into gluuuuu
[15:12:44] <rue_house> on just about anything
[15:13:00] <z64555> well, yeah.
[15:13:17] <goppo> umm
[15:13:21] <goppo> maybe i should stay away then :S
[15:13:43] <z64555> honestly its not that big of a deal
[15:13:52] <rue_house> go to an auto shop and get a tube of high temp grease
[15:15:00] <rue_house> I wonder if it would cost less to produce gas from old shingles than it does to produce it from tar sand
[15:15:29] <rue_house> and tires
[15:15:46] <z64555> but tires are vulcanized rubber
[15:16:09] <goppo> z64555, well, i'm only dealing with a small force
[15:16:14] <z64555> about the only conervsions on that is to burn em or shred them for tarmac
[15:16:32] <goppo> if the grease becomes sticky, it'd be nasty
[15:16:58] <z64555> so use a lighter grease
[15:17:16] <goppo> and the grease will need to be applied uniformly in order to reduce wobbling, right
[15:17:24] <rue_house> I'v had oils turn to glue on me too
[15:17:31] <rue_house> mostly wd40 and 4 in 1
[15:17:35] <goppo> and grease shifts over time?
[15:17:39] <z64555> nah, it'll spread itself out as it operates
[15:17:47] <goppo> right
[15:18:08] <z64555> like I said before, the grease will dampen the wobble
[15:18:34] <z64555> the adhesion effect makes the grease behave like a spring
[15:18:45] <z64555> compression and extension spring
[15:20:47] <z64555> you're gonna get wobble no matter how you look at it
[15:20:56] <goppo> i guess, with +-0.2MM tolerance, the gap will be at most 0.4MM
[15:20:59] <goppo> that isn't too bad..
[15:21:01] <z64555> trick is to figure out how to reduce it or keep it in check
[15:21:26] <z64555> This is for like a drive axle, right?
[15:21:31] <goppo> z64555, how about lubricant - could that be used to reduce wobble?
[15:21:48] <z64555> it doesn't have an adhesive affect like grease does
[15:21:57] <z64555> It still does, but its much much weaker
[15:22:00] <rue_house> wait, what are you trying to do
[15:22:01] <rue_house> ?
[15:22:05] <goppo> z64555, well, yes it's for an axle. but it's just spring loaded
[15:22:27] <goppo> my part looks like
https://i.imgur.com/1LiMdIa.png
[15:22:30] <rue_house> maybe you should take apart a printer and use the 6mm rods and bushings from it
[15:22:35] <goppo> where the spring sits on the base pushing up against the head of the shaft
[15:23:13] <rue_house> bear the verticle and side forces seperatly
[15:23:18] <rue_house> know what a thrust bearing is?
[15:23:44] <goppo> this is a very small setup
[15:23:53] <goppo> OD is 10MM
[15:24:03] <z64555> micromachine territory
[15:25:05] <goppo> well it's just a small part
[15:25:12] <goppo> still googling to find the right grease...
[15:26:12] <goppo> how about a big blob of lubricant?
[15:26:22] <rue_house> goto automove shop, ask for high temp grease, buy tube ~$10
[15:26:44] <rue_house> for you, 10x lifetime supply in one tube
[15:26:59] <z64555> or longer
[15:27:09] * z64555 still has his tube from 6 years ago...
[15:27:12] <goppo> right
[15:27:32] <rue_house> well I'd hope you live longer than 6 years
[15:27:46] <goppo> is it used as lubricant typically?
[15:27:47] <rue_house> not that people design things as if people do
[15:28:21] <rue_house> http://ruemohr.org/~ircjunk/tutorials/mech/p1000785_bearings.jpg
[15:28:22] <rue_house> :P
[15:28:44] <rue_house> some nice little 8mm thrusts in there too
[15:28:57] <rue_house> and some 6mm
[15:29:51] <goppo> for typical grease, will it become sticky at 10C?
[15:29:59] <goppo> typical high temperature grease
[15:30:03] <rue_house> na
[15:31:05] <goppo> rue_house, so the temperature concern z64555 raised earlier, when will it become gluey?
[15:31:10] <goppo> sub zero?
[15:31:33] <rue_house> might get really thick subzeroc
[15:31:58] <rue_house> you know what you need
[15:32:17] <rue_house> experience, go DO something, and get experianec
[15:32:28] <rue_house> if you dont DO things, you dont learn
[15:32:39] <rue_house> the more you do, the more you learn
[15:32:54] <z64555> Right, it's your design, not ours. :)
[15:33:08] <rue_house> nothing with ever be perfect, look at windows, they been trying for YEARS and they aren't even remotly close
[15:33:32] <z64555> (the operating system)
[15:33:35] <goppo> i appreciate that. i'm quite keen on trying the grease idea
[15:33:37] <rue_house> yea
[15:33:54] <rue_house> dont be keen, go to the auto parts place right now
[15:34:11] <z64555> like right now
[15:34:17] <z64555> don't even take the time to put on pants
[15:34:24] <z64555> well maybe do put on pants
[15:34:45] <rue_house> if you dont, some people will appreciate you for it, if you do, others will
[15:35:21] <goppo> lol
[15:35:23] <deshipu> you can;t do a proper geographic discover if you don't wear pants, though
[15:35:24] <rue_house> tho, the odds are more people will prolly appreciate you not wearing any than the number of ones who dont appreciate you for wearing them cause they just take it for granted
[15:36:03] <rue_house> I really cant say I'v heard anyone express their appreciation for someone else wearing pants
[15:36:27] <rue_house> hmmm
[15:36:47] <rue_house> regardless, go to the auto parts shop
[15:37:01] <deshipu> that's how Columb discovered America, even though there were people there already
[15:37:09] <deshipu> they didn't wear proper pants
[15:37:18] <rue_house> ah
[15:37:27] <rue_house> but now they dont pay taxes
[15:37:47] <goppo> ok cool. i'll pop over tomorrow
[15:37:53] <rue_house> maybe that means, No pants, No taxes.
[15:38:01] <deshipu> if you don't wear pants, you are indigenous
[15:38:38] <deshipu> how can they pay taxes without pants?
[15:38:42] <deshipu> that makes no sense
[15:38:44] <rue_house> hmm, maybe one day I'll ask if they would exclude charging me the tax on something if I take off my pants
[15:38:49] <rue_house> hmmmmm
[15:39:03] <pokmo> without pants, there's nowhere to put wallet
[15:39:10] <deshipu> easier to get forgiveness than permission
[15:39:12] <deshipu> don't ask
[15:39:15] <z64555> purse, satchel
[15:39:22] <rue_house> your right, I'd have to ask for a better discount than just the taxes
[15:40:04] <z64555> rue_house: is enjoying this too much, lol
[15:40:19] <rue_house> this is a verry new train of thought ya know
[15:40:28] <rue_house> I'd never thought of the significance of pants before
[15:41:03] <rue_house> I"m waiting to either fall asleep or wake up
[15:41:12] <rue_house> I hate limboland
[15:41:18] * rue_house goes to get mroe tea
[15:41:31] <pokmo> i think he's encouraged to raid IRS pantless
[16:12:56] <Korgo> anyone midwest?
[16:15:11] <Tom_itx> yup
[16:15:50] <Korgo> wisconsin?
[16:15:57] <Tom_itx> nope
[16:16:05] <Korgo> boo
[16:16:07] <Korgo> chicago?
[16:32:09] <deshipu> nie
[16:47:20] <veverak> fuuu
[16:47:28] <veverak> picking license is tricky
[17:02:06] <deshipu> for what?
[17:08:30] <veverak> sw for robot
[17:08:32] <veverak> :)
[17:33:39] <deshipu> who do you want to use it?
[17:47:18] <veverak> well
[17:47:45] <veverak> anybody, but I want to restrain it so it can't get closed source
[17:47:51] <veverak> in sane way
[17:48:08] <Jak_o_Shadows> as in #fsf?
[17:48:24] <Jak_o_Shadows> Or just use GPL :P
[17:48:31] <veverak> GPL v3 there so far
[17:51:27] <deshipu> sounds good
[17:51:41] <deshipu> as long as you don't have other contriubutors, you can change it
[17:52:29] <veverak> yeah
[17:53:01] * veverak now finally splitted it into parts
[17:53:05] <veverak> it started to be one big ugly repo
[17:53:07] <veverak> :)
[18:26:02] <veverak> damn it
[18:26:11] <veverak> 'veverak' is taken on github and that person actually uses it
[18:26:17] <veverak> (while it doesn't looks so on public repo)
[18:42:57] * z64555 doesn't have that problem
[18:43:21] <z64555> except for email... seems a company or something decided to register their email accounts with "z"
[18:43:33] <z64555> there's quite a few z emails
[18:47:33] <veverak> :)
[19:06:06] <justanotheruser> Can I get some info on robotics (hardware) education and mechanical design software?
[19:13:17] <veverak> ok
[19:13:22] <veverak> copying that backups of .img of rpi
[19:13:24] <veverak> takes some time
[19:13:26] <veverak> 22Gb
[19:13:32] <veverak> maybe i should compress it
[19:15:18] <ace4016> justanotheruser, what are you looking for exactly?
[19:15:32] <ace4016> robotics isn't quite a standardized field like automobiles or so
[19:15:40] <justanotheruser> ace4016: an overview of mechanical engineering robots
[19:16:06] <ace4016> http://www.seattlerobotics.org/gettingstarted.php
[19:17:17] <veverak> damn it
[19:17:28] <veverak> for the feeling whan you use "bzr" at work and "git" for your projects
[19:17:34] <veverak> you tend to write the wrong command a lot
[19:17:39] <ace4016> hehe
[19:18:08] <justanotheruser> ace4016: I was thinking more along the lines of the mechanical engineering component
[19:18:42] <justanotheruser> systems of gears, arranging components so they are stable, and other things that I don't know I don't know
[19:19:18] <ace4016> ah...that's just plain ol' mechanical engineering
[19:19:20] <Jak_o_Shadows> Well, gears are simple in theory.
[19:19:35] <Jak_o_Shadows> Through I think the practice is a little harder sometimes, but it's all simple enough in theory
[19:19:45] <Jak_o_Shadows> (Even if I would have to look up ow to do planetary systems)
[19:19:47] <ace4016> robotics is just an amalgamation of various fields applied to a problem set
[19:19:51] <justanotheruser> I see
[19:19:55] <Jak_o_Shadows> Arranging things so they are stable is a bit broader.
[19:20:04] <justanotheruser> Any recommended mechanical engineering resources?
[19:20:14] <Jak_o_Shadows> Static stability is just balancing them - Making your sum of moments to be 0
[19:20:21] <Jak_o_Shadows> and sum of forces I suppose
[19:20:33] <Jak_o_Shadows> Do you know any statics? DO you know what a free body diagram is?
[19:20:33] <ace4016> hrm, we should work on getting a mechE resource to link beginners...
[19:21:22] <Jak_o_Shadows> I should work on that - I do have a slightly unusual view of things though
[19:22:25] <ace4016> MIT may have some opencourse ware on mechanical engineering...i don't recommend that approach unless your intent is to go ME. if you're looking at building robots now, i'd pick a problem set the robot will solve and work backwards, learning what you need to get it to do what you want
[19:22:40] <Jak_o_Shadows> (BTW, don't worry if you haven't heard of statics or free body diagrams - most people here wouldn't use them, too much, but you did ask about the mech eng side of things)
[19:22:59] <ace4016> i have some text books, but not sure how good they are compared to other things out there
[19:23:45] <Jak_o_Shadows> I'm not a fan of the hibbler textbooks
[19:24:31] <ace4016> haha, that's the one i have :P
[19:25:26] <Jak_o_Shadows> Oh yeah, it's very common, and popular. Just not quite my style
[19:26:14] <ace4016> justanotheruser, what a time to be alive! MIT open courseware on ME stuff:
http://ocw.mit.edu/courses/#mechanical-engineering
[19:26:37] <justanotheruser> awesome, checking it out
[19:26:37] <ace4016> the Dynamics, Controls, and modeling ones will be of interest to you
[19:27:00] <ace4016> though...you'll likely use very little of those fields when making home robots :P
[19:27:04] <Jak_o_Shadows> Really need to have statics down before you move to dynamics.
[19:27:23] <ace4016> you'll need more than those courseware classes if you want to compete with Boston Dynamics though
[19:27:34] <ace4016> aye, learn Statics before Dynamics...
[19:28:04] <Jak_o_Shadows> Through, don't worry too much about trusses and bridge-type things.
[19:28:09] <ace4016> oo...they have grad level classes there too
[19:28:10] <justanotheruser> boston dynamics makes some creepy stuff
[19:28:17] <ace4016> :D
[19:28:35] <Jak_o_Shadows> ace, what's your opinion on learning stress analysis? I think it's very important to be able to do it, even if it doesn't come up too much in small scale
[19:29:13] <veverak> justanotheruser: buy lego
[19:29:15] <veverak> a lot of lego
[19:29:18] <veverak> try to make stuff with it
[19:29:21] <justanotheruser> lolwut
https://www.youtube.com/watch?v=wE3fmFTtP9g
[19:29:24] <veverak> try to make it as stable as it can get
[19:29:26] <veverak> :)
[19:30:05] <ace4016> depends...if you want to make anything more complex than the stuff that shows up on hackaday, you'll probably be smacked in the face with stress issues. so it would probably be better to learn it :P
[19:30:30] <veverak> https://www.youtube.com/watch?v=RDZu04v7_hc
[19:30:32] <veverak> much better vid
[19:34:00] <Jak_o_Shadows> Yeah, I agree completely
[19:38:01] <ace4016> most people don't design things industrially/commercially though, so they only need it to last a few runs to make a youtube video and they're onto the next project :P
[19:38:18] <veverak> amen to that
[19:38:19] <veverak> :)
[19:38:24] <veverak> nah
[19:38:41] * veverak still didn't rewrote that script to parse args proeprly
[19:38:53] <Tom_itx> even commercially isn't made to last like it used to be
[19:39:13] <veverak> commerciall just means 2 years
[19:39:15] <veverak> :)
[19:39:23] <Tom_itx> designed failure
[19:40:03] <Tom_itx> they pride themselves in beating the warranty by a couple days
[19:40:22] <veverak> :)
[19:40:32] <veverak> well
[19:40:38] <veverak> projet repo splitted in three -> DONE
[19:40:44] <veverak> and I cleaned some stuff during it
[19:41:26] <ace4016> hehe, there was a guy on youtube that jokingly ranted that harbor freight engineers are the most amazing as they've constructed their products to have a reverse bathtub curve :P
[19:45:27] <Tom_itx> i got a drill from there that broke before it finished drilling one hole
[19:45:51] <Tom_itx> angle drill with a 1/4"ish drill
[19:45:57] <rue_shop3> reverse bathtub curve?
[19:46:16] <Tom_itx> i suppose you just shower
[19:46:23] <Tom_itx> never seen an upside down tub
[19:51:47] <ace4016> rue_shop3, low infant mortality, but breaks on you when you most need it; but if it gets past the normal lifespan of a tool, it will likely last forever :P
[19:52:10] <ace4016> can't return to the store if they don't break at inoppurtune times
[19:53:58] <z64555> reverse bathtub curve. lmao
[20:08:23] <rue_shop3> hmm
{kind=link}
{kind=link}
{kind=link}
{kind=link}