Back
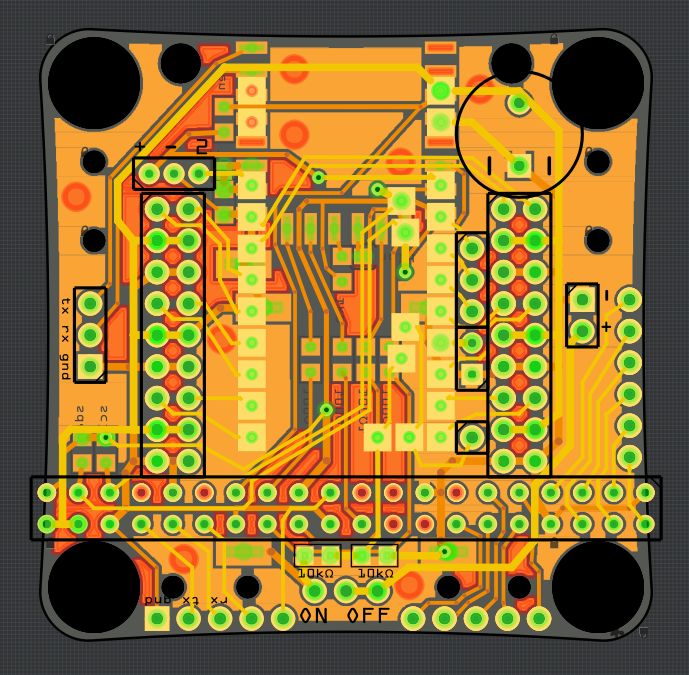
[08:43:31] <deshipu> https://cdn.hackaday.io/images/6451941455199997495.png
[08:43:37] <deshipu> This is a masterpiece!
[08:49:42] <[cube]> so...beautiful....
[08:49:45] <[cube]> brings a tear to my eye
[09:00:36] <deshipu> it's Arduino plus Raspberry Pi Zero plus ESP8266
[09:00:41] <deshipu> ultimate geek out
[09:01:07] <jhylands> nice
[09:01:40] <jhylands> I especially like the way you sculpt the board edges
[09:02:08] <jhylands> although it looks like some of the pins are overlapping the edge?
[09:02:21] <deshipu> yes
[09:02:27] <deshipu> I'm limited to 5cm
[09:02:33] <deshipu> and the rpi header is 40 pins...
[09:02:46] <jhylands> so those will be half-holes?
[09:02:48] <deshipu> on the plus side, those pins are not important
[09:02:54] <deshipu> yeah, castellated
[09:03:01] <deshipu> or how do you call that
[09:03:05] <jhylands> no idea
[09:05:58] <deshipu> I'm still not sure whether I want to actually make this
[09:06:08] <deshipu> it's getting too crazy
[09:06:27] <jhylands> what does the arduino buy you? Analog input?
[09:07:03] <deshipu> analog input and servo PWM
[09:07:12] <deshipu> and frees a bunch of rpi pins
[09:07:41] <deshipu> also, I can mix-and-match -- for instance, only have the arduino, or only arduino and esp8266
[09:07:50] <jhylands> sure
[09:07:50] <deshipu> or only arduino and rpi
[09:08:01] <deshipu> they are all connected with i2c bus
[09:08:31] <deshipu> plus the esp8266 is connected to the rpi as SDIO wifi
[09:09:18] <jhylands> oh, so you're using the esp to provide wifi for the zero? that's cool
[09:09:38] <deshipu> yeah, based on this
https://hackaday.io/project/8678
[09:09:41] <jhylands> beats plugging in a USB dongle
[09:09:45] <deshipu> they did all the hard work
[09:10:34] <deshipu> it's not super-fast
[09:10:38] <deshipu> but it doesn't have to be
[09:15:15] <jhylands> I have one of these showing up tomorrow:
https://www.adafruit.com/products/1937
[09:15:24] <jhylands> its the perfect size for Roz
[09:15:42] <veverak> deshipu: looks awesome
[09:15:45] <veverak> :)
[09:15:58] * veverak is getting now headache with code to calculate IK
[09:16:19] <veverak> result is that I started to practice 'ascii art geometric drawings' in comments
[09:17:06] <deshipu> veverak: you only need atan2 and the rule of cosines
[09:18:35] <veverak> deshipu: ehmm, yeah but I want something....
[09:18:55] <veverak> let's say smarter
[09:19:11] <rue_house> veverak, I wrote a library for ik
[09:19:20] <veverak> it actually takes vectors as definition of arms, instead of just arm lengths
[09:20:07] <rue_house> linus must have once been like "I wrote this OS kernel..."
[09:22:45] <rue_house> I think I got about 3 minutes of sleep last night
[09:25:25] <veverak> idea is that you move it to 0 pos
[09:26:08] <veverak> I mean, move servos to 0 pos
[09:26:34] <veverak> figure out where there are to each other and 'end point' as vector, write in program and done
[09:27:43] <rue_house> once I decided to start by writing a generic servo library
[09:29:43] <rue_house> it defines the scale and zero for a servo, and helps manage updates
[09:30:00] <veverak> updates?
[09:30:22] <rue_house> a servos command position is updated as the servo does its thing
[09:30:50] <veverak> it's true that my servo thing just counts on -90 to 90 input ... :)
[09:31:05] <veverak> rue_house: -> feedback ?
[09:31:07] * veverak got that too
[09:31:16] <rue_house> its possable the software will update the command position at a higher or lower rate than the servo update rate
[09:31:38] <rue_house> not all servos are rotary
[09:32:05] * veverak wanted to try to make 'speed' control for normal pwm servos -> code with specified frequency updates posiiton where it should be based on speed
[09:32:06] <rue_house> some softwares will expect the command value to be a positon in degrees, some might be cm, some might be mm
[09:32:28] <veverak> and makes feedback of that
[09:32:44] <veverak> (that part is done and I just expect dbeugging it)
[09:33:11] <veverak> yeah, "it's for 180 degrees rotary servo" makes my life easier :)
[09:33:24] <rue_house> I control speed as the difference in position over time
[09:33:42] <rue_house> so it becomes a function of the update call in the interpolator
[09:34:14] <rue_house> if you put a 1:2 gear on your servo, it'll be 0-360 degrees
[09:34:19] * veverak got radians/sec
[09:34:30] <veverak> yeah
[09:34:44] <veverak> rue_house: I sort of assert that the thing that sends commands to servo module should handle that
[09:35:32] <rue_house> I have a small library that wraps servos into arrays
[09:36:21] <veverak> because, this stuff can get much more complex than just making it 0-180 to 0-360... or 0-90
[09:36:42] <rue_house> the interpolator is the main peice, I use callbacks, so it can operate anything
[09:36:47] <veverak> so, better to state that servo mdoule can't modify that and other things have to deal with it
[09:36:52] <veverak> :)
[09:37:35] <rue_house> arg, I need more sleep
[09:40:23] <veverak> but I feel that I will rewrite this in C++ eventually from python
[09:40:31] <veverak> if done right it will make things so much faster
[09:40:54] <rue_house> c++ is evil
[09:44:39] <veverak> but I like it :)
[11:35:45] <deshipu> computers are evil
[11:39:54] <Amyzonian> Anyone here going to be at Robocon@MIT tomorrow?
[11:40:13] <deshipu> Amyzonian: where is it?
[11:40:26] <Amyzonian> At MIT's Cambridge campus, deshipu
[11:42:05] <deshipu> at least it's the right continent
[11:42:29] <deshipu> no, wait
[11:42:32] <deshipu> MIT is in Cambridge?
[11:42:34] <deshipu> since when?
[11:42:49] <deshipu> I thought it's in Massachusetts
[11:43:29] <jhylands> Cambridge is in Mass
[11:43:43] <jhylands> its a part of Boston
[11:44:28] <deshipu> I thought it's in England
[11:45:27] <deshipu> Cambridge (/ˈkeɪmbrɪdʒ/[2] kaym-brij) is a university city and the county town of Cambridgeshire, England, on the River Cam about 50 miles (80 km) north of London.
[11:45:46] <jhylands> https://en.wikipedia.org/wiki/Cambridge,_Massachusetts
[11:47:08] <deshipu> "Chrles River"? That makes no sense
[11:47:13] <deshipu> should be Charlesbridge
[11:47:35] <Amyzonian> Don't be hating on my sweet river.
[11:47:41] <jhylands> I live in London, Ontario - the Thames river flows through this city
[11:47:44] <Amyzonian> You can hate on the Mystic river, that one's gross.
[11:48:03] <deshipu> jhylands: I bet you also have a bunch of Warsaws and Częstochowas in there
[11:48:04] <Amyzonian> Cambridge is across the river from Boston. They are both cities in Massachusetts
[11:48:25] <deshipu> so confusing
[11:48:27] <jhylands> I used to live in Scotland, Ontario, just down the road from Paris, Ontario
[11:48:31] <deshipu> make up your own city names
[11:49:07] <jhylands> London Ontario is in Oxford county
[11:49:08] <Amyzonian> We use some native names for cities around here. They confuse people that don't know how to pronounce them.
[11:49:21] <deshipu> Amyzonian: that's how it's supposed to be!
[11:49:36] <deshipu> Amyzonian: we have Szczecin in Poland!
[11:49:48] <deshipu> that's one nobody is going to steal from us
[11:50:08] <Amyzonian> deshipu: Yes, but these fellahs came over from Europe and decided to rename things after their families
[11:50:49] <veverak> :)
[11:50:57] <jhylands> The thing is, you guys all have your own languages - we share the same language as England, so its not surprising that the settlers named their towns and cities with familiar names
[11:50:57] * veverak finally picked label printer
[11:51:05] <veverak> Brother PTP-700
[11:51:15] * veverak will soon change into organization freak
[11:51:23] <deshipu> jhylands: Paris is not even English
[11:51:27] <Amyzonian> veverak: Oh, I used to use one of those to label thigns at work
[11:51:45] * veverak inteds to do so in his hobby project
[11:51:50] <jhylands> well, we had settles from France and England back in the day
[11:51:52] <Amyzonian> Label everything!
[11:51:53] <jhylands> thus Quebec
[11:52:03] * veverak is chaotic a lot, so he needs tools balance things a bit
[11:52:06] <veverak> Amyzonian: exactly!
[11:52:29] <deshipu> jhylands: you had Germans too, what did you do with them?
[11:53:04] <deshipu> not to mention all the Irish and Polish people
[11:53:06] <jhylands> http://neustadt.ca/
[11:53:30] <jhylands> http://www.wilnovillager.on.ca/
[11:54:13] <jhylands> http://www.theglobeandmail.com/news/national/a-tongue-twisting-labour-of-love-in-canadas-gaelic-speaking-community/article593113/
[11:54:14] <deshipu> "Roczime do Wilna" is certainly not Polish :/
[11:54:50] <jhylands> Ontario is a big place
[11:55:08] <jhylands> what country do you live in, deshipu?
[11:55:35] <Amyzonian> Are you in the UK somewhere?
[11:55:36] <deshipu> I live in Switzerland, but I'm polish.
[11:56:24] <Amyzonian> Well you should fly on over to Boston and see what happens this weekend. It's MIT's first robot convention, so I hope it's good
[11:57:23] <deshipu> Amyzonian: I'd love to, but I'm planning on spending the weekend in the bed, sick
[11:57:52] <Amyzonian> deshipu: I hope you feel better :(
[11:57:54] <jhylands> Ontario would come in 35th place in terms of land areas, compared to all the countries in the world
[11:58:53] <jhylands> actually, counted wrong - 29th place
[11:59:16] <veverak> hmm
[11:59:23] <veverak> Amyzonian: do I want flexible paper or normal?
[11:59:34] <veverak> it's laminated anyway
[11:59:58] <Amyzonian> veverak: I like normal, I thiink the flexible is better if you plan on putting them on a lot of curvy surfaces
[12:00:29] <deshipu> Amyzonian: tbh I have no idea what it is, it started today, I have 35°C and my head swims
[12:00:49] <veverak> Amyzonian: I plan to "flag" cables
[12:01:39] <Amyzonian> veverak: Then you want Flexible
[12:02:04] <veverak> good
[12:02:04] <Amyzonian> veverak: Also having both ends of a cable labeled feels so good. You always know what's what
[12:05:34] <veverak> exactly the point of getting that thing
[15:19:59] <Snert_> https://youtu.be/Bnnyb43II4c <--- robot that plays ping pong
[15:23:54] <Snert_> their rotary encoders are affordable, at least.
[15:33:59] <doomlord> is that thing multipurpose
[15:34:15] <doomlord> or did they really build a one off robot to play a stupid game
[15:38:04] <Snert_> more of a technology demonstrator. It's on Omron's web site.
[15:38:09] <Snert_> so special design.
[15:38:58] <Snert_> Looks right out of H. G. Wells.
[16:05:04] <deshipu> I bet it can't handle screwballs
[16:40:56] <Snert_> looks like a glorified rostok 3d printer
[17:11:34] <akem> hi
[17:13:19] <deshipu> veverak: by the way, OpenMV arrived and I played with it a little
[17:13:44] <deshipu> veverak: face tracking is pretty cool
[17:15:27] <akem> arduino uno took control over all my bases
[17:15:44] <deshipu> set it up the bomb
[17:16:27] <veverak> deshipu: cool, what about delay?
[17:16:34] <akem> i would rather outlaw the atomic energy
[17:17:04] <deshipu> veverak: delay?
[17:20:52] <akem> seen and waiting for some nice sensors, gaz/monoxide, smoke and so on
[17:21:09] <akem> they look fun also
[17:23:49] <akem> and i do know you guys are so interested into this, but i'll tell you more about this another day since i have enough problems with my android dev times, bon appetit to me.
[17:37:19] <veverak> deshipu: move in front of camera -> move seen on viewer over eifi
[17:37:22] <veverak> :)
[17:37:29] <deshipu> eifi?
[17:37:56] <deshipu> there is no wifi
[17:38:09] <deshipu> the image processing happens on the board itself
[17:42:34] <veverak> I know, but I thought it got streaming capabillity
[17:42:40] <veverak> nvm :)
[20:18:14] * flyback bites Xiao
[20:18:15] <flyback> CANUCK
[20:18:16] <flyback> CANUCK
{kind=link}