Back
[01:40:35] <zerocat-1> i need help
[01:42:44] <zerocat-1> i have dynamixel to make my robot move (hexapod) controlled by arduino nano. the problem is the dynamixel easy to broken.
[01:43:03] <zerocat-1> how to prevent this ?
[02:00:00] <SpeedEvil> fix it?
[02:00:05] <SpeedEvil> What do you mean by 'broken'
[02:00:28] <SpeedEvil> Do you simply mean bits snap off?
[02:01:01] <SpeedEvil> The general solution is outboard bearings to offload all but the driven axes from the motor, and perhaps clutches to cope with overtorque
[02:02:39] <rue_shop3> zerocat-1, explain broken
[02:03:04] <rue_shop3> zerocat-1, electronics broken? mechanical broken?
[02:03:14] <SpeedEvil> Maybe it's alcoholic?
[02:03:42] <rue_shop3> maybe nobody fixed it
[02:03:48] <rue_shop3> its getting off lucky :)
[02:04:49] <rue_shop3> SpeedEvil, I need to write a cam program for linux
[02:05:01] <zerocat-1> the dynamixel smoke and i don't know why because the last trial is working fine
[02:05:11] <rue_shop3> zerocat-1, ok
[02:05:29] <rue_shop3> zerocat-1, what is power supply?
[02:05:33] <SpeedEvil> zerocat-1: Are you sure you're providing it with the ...
[02:06:20] <rue_shop3> SpeedEvil, the problem so far has been that I cant manage to get a gui interface that has a text box with featrues like hisotry
[02:06:25] <rue_shop3> so I think I wont
[02:06:30] <zerocat-1> SpeedEvil: dynamixel not working again mr. is it possibble code can broke dynamixel ?
[02:06:50] <rue_shop3> I'll bring up a graphics window and leave the user to type things in on the terminal window it has to be started from
[02:06:58] <rue_shop3> zerocat-1, what is power supply?
[02:07:00] <rue_shop3> zerocat-1, what is power supply?
[02:07:00] <rue_shop3> zerocat-1, what is power supply?
[02:07:01] <rue_shop3> zerocat-1, what is power supply?
[02:07:01] <rue_shop3> zerocat-1, what is power supply?
[02:07:06] <zerocat-1> the vcc is 12 volt
[02:07:20] <rue_shop3> battery or wall supply?
[02:07:47] <zerocat-1> battery sir
[02:08:16] <rue_shop3> was battery connection for sure correct?
[02:08:55] <zerocat-1> and directly connected to dynamixel without ic regulator or other safety unless just capasitor
[02:09:08] <rue_shop3> ok, what is dynamixel model?
[02:09:13] <zerocat-1> yes sure, because lastly trial is success
[02:09:18] <zerocat-1> AX-12
[02:10:31] <rue_shop3> problem is that maximum voltage for ax-12 is 10V
[02:10:37] <rue_shop3> you say you use 12V
[02:10:39] <zerocat-1> the last trial before broke my robot (hexapod using dynamxel) is going well and after i make little change with my code, it's happen (broke)
[02:11:04] <rue_shop3> votlage must be more than 7 and less than 10
[02:11:18] <rue_shop3> 12 volt is too much
[02:11:34] <zerocat-1> yes i use 12 volt, oh shit i don't know about this voltage range
[02:11:53] <rue_shop3> http://www.google.ca/url?sa=t&rct=j&q=&esrc=s&source=web&cd=2&ved=0ahUKEwjYoZOWlOXKAhVDy2MKHU6NDTcQFggjMAE&url=http%3A%2F%2Fwww.generationrobots.com%2Fmedia%2FDynamixel-AX-12-user-manual.pdf&usg=AFQjCNHk8zJdnCR2QTAPpqnKBTsoj5ESVA&bvm=bv.113370389,d.cGc
[02:11:56] <rue_shop3> ugh
[02:11:57] <SpeedEvil> you should probably check the voltage range of everything you have connected
[02:13:46] <rue_shop3> didn't really think even a dynamixel could use 12V
[02:14:05] <zerocat-1> ok thanks all. last question is, is it possible code can broke dynamxel. for example i make change to move servo degree to 150 degree but servo just move to 100 degree because something prevent it
[02:14:33] <rue_shop3> zerocat-1, I think dynamixel smart. will stop without harming itself
[02:14:55] <zerocat-1> ok thanks, so the problem is in power supply
[02:15:26] <rue_shop3> light will flash if mechanical overload problem
[02:15:39] <zerocat-1> thanks rue_shop3 SpeedEvil. thanks very much. you solve my problem :)
[02:20:21] <rue_shop3> SpeedEvil, so, anyhow, I suppose thats what I'll start working on
[02:20:42] <rue_shop3> I either need a library for reading/writing dxf files, or to come up with someting of my own
[02:20:51] <rue_shop3> portal to dxf would be a good thing
[02:25:01] <zerocat-1> how about this mr SpeedEvil
http://support.robotis.com/en/product/dynamixel/ax_series/dxl_ax_actuator.htm
[02:25:11] <zerocat-1> Voltage : 9 ~ 12V (Recommended Voltage 11.1V)
[02:25:34] <rue_shop3> interesting, they have conflict
[02:26:25] <rue_shop3> in other document they say 10V maximum
[02:27:33] <rue_shop3> did servo come with manual?
[02:31:05] <zerocat-1> oh shit., thanks for your correction. i don't know sir because this is not my own. i make robot for my collage
[02:31:42] <rue_shop3> explain conflict, ask for official manual
[02:40:41] <zerocat-1> is it the age of servo determined ability of servo. because servo that i used had been 4 years used
[02:42:00] <rue_shop3> I dont know
[02:42:08] <rue_shop3> dynamixel cost too much for me
[02:44:30] <zerocat-1> so what kind of servo that you used if you need a servo ?
[02:45:13] <rue_shop3> I make servo or use cheap china servo
[02:47:08] <zerocat-1> china servo ? what type sir ?
[02:47:22] <rue_shop3> sg90 or
[02:48:07] <SpeedEvil> zerocat-1: what are you trying to make?
[02:48:22] <zerocat-1> hexapod robot for fire fighting
[02:48:34] <SpeedEvil> zerocat-1: something the size of a potato, or a person?
[02:50:17] <rue_shop3> http://www.aliexpress.com/item/1-pcs-lot-Tower-Pro-Metal-gear-Digital-MG90S-9g-Servo-Upgraded-SG90-For-Rc-Helicopter/32236767396.html
[02:50:19] <rue_shop3> or like this
[02:50:37] <zerocat-1> 27 x 28 and high is 22 (all in cm)
[02:50:50] <zerocat-1> body using bioloids from robotics
[02:51:33] <zerocat-1> rue_shop3: ok thanks this is can be my reference
[02:51:51] <rue_shop3> to make themselvs more compeditive, I think hitek increased their prices....
[02:55:18] <zerocat-1> wait, i use servo type AX-12A not AX-12. is it different in power supply mr SpeedEvil
[03:03:42] <SpeedEvil> I have no idea
[03:03:51] <SpeedEvil> find the manufacturers specifications
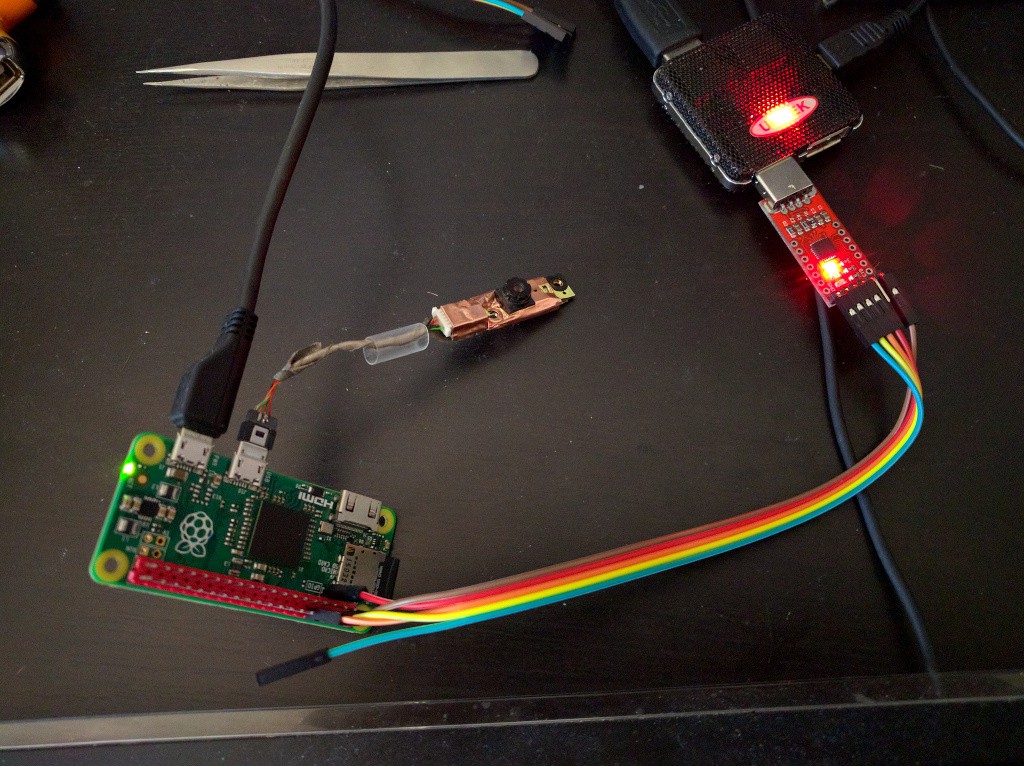
[08:28:07] <deshipu> got the camera working:
https://cdn.hackaday.io/images/5400171454853702270.jpg
[08:30:10] <SpeedEvil> yay
[08:30:23] <veverak> good
[08:30:23] <SpeedEvil> what camera is that?
[08:30:38] <deshipu> random camera module from an old laptop
[08:30:51] * veverak got such a module around
[08:30:58] <deshipu> lsusb says: Bus 001 Device 045: ID 174f:5a31 Syntek Sonix USB 2.0 Camera
[08:31:15] <veverak> speaking of working things
[08:31:24] * veverak finally got dynamic reconfigure
[08:31:26] <veverak> http://i.imgur.com/4LPsNum.png
[08:31:28] <veverak> <3
[08:31:30] <veverak> :)
[08:37:36] <deshipu> veverak: that's a lot of sliders
[08:40:11] <veverak> yeah
[08:40:12] <veverak> :)
[08:45:17] <zerocat-1> i need to know what the exactly function of Dynamixel.setAngleLimit and how to use it. i had read the manual and the parameter is char ID, int CWlimit, int ccwlimit. but after i did it there is no change.
[08:46:05] <veverak> deshipu: and all of them should be working
[08:46:18] <veverak> although I should resend position on pusel width change
[08:46:24] <veverak> *pulse
[08:46:39] <veverak> and one last thing is missing; "trimming"
[08:46:49] <veverak> and I have awesome gui to trim it
[08:49:29] <deshipu> zerocat-1: it should disallow moving outside of the specified range, from what I guess
[08:51:54] <zerocat-1> i had write Dynamixel.setAngleLimit(3,100,500); and change servo degree to 600 with Dynamixel.move(3,900); and the servo go to angle 900. so i think it is not working. is i do right way ?
[08:52:04] <zerocat-1> my ID servo is 3
[09:00:30] <veverak> http://i.imgur.com/7qMO5lB.png
[09:00:33] <veverak> aaaand done
[09:00:37] <veverak> oh god, how I love ROS
[09:00:37] <robotustra> hi
[09:00:39] <veverak> :)
[09:01:09] <robotustra> what about support my campaign?
[09:01:19] <veverak> nope
[09:01:21] <veverak> your robot too big
[09:01:23] <robotustra> hehe
[09:01:32] <robotustra> but it will be useful
[09:01:43] <robotustra> not big, 150 cm
[09:02:00] <veverak> big is relative term
[09:02:01] <robotustra> from the floor
[09:02:02] <veverak> :)
[09:02:21] <veverak> so, for me its' 120cm bigger than I would like
[09:02:36] <robotustra> actually small robots are useless
[09:02:46] <veverak> your opinion
[09:03:04] <robotustra> or specific like roomba
[09:03:51] <robotustra> I need universal robot
[09:04:05] <robotustra> and this one will do avatar function :)
[09:04:39] <robotustra> if you forget to turn off your stove - you can make it remotely
[09:05:21] <robotustra> besides a lot of other things
[09:06:15] <robotustra> it can open the frodge, look inside, take a picture, send you a list of what you need to buy
[09:06:43] <robotustra> no one robot toy does it for now
[09:07:06] <robotustra> all robots are for sale costs more than 10k+
[09:07:28] <robotustra> there is no kits of affordable robot
[09:07:59] <robotustra> if there were kits of robot like I do - I would buy it immediately
[09:08:29] <deshipu> robotustra: so how much did your robot cost you so far?
[09:09:32] <robotustra> BOM is 5000
[09:10:02] <veverak> 5000$ you crazy?
[09:10:04] <veverak> :D
[09:10:08] <robotustra> but I think it could be chipper with replacement
[09:10:17] <robotustra> it's full sized robot
[09:10:17] <deshipu> robotustra: and the work time?
[09:10:30] <deshipu> rd the tools?
[09:10:42] <deshipu> and the failed prototypes?
[09:10:46] <robotustra> tools if you buy it 1000-2000
[09:11:08] <robotustra> there is no failed prototypes
[09:11:27] <deshipu> I think that for 5k I'm willing to check my fridge manually
[09:11:40] <deshipu> robotustra: ah, I see, so that's still coming :
[09:12:08] <robotustra> go buy home robot you can maintain for 7000
[09:12:17] <robotustra> and show me where
[09:12:49] <deshipu> what even is "home robot"?
[09:12:50] <robotustra> ARMS which do cooking by copy motions of chief cook costs 15000
[09:12:58] <robotustra> household
[09:13:12] <veverak> ok
[09:13:21] <deshipu> reminds me when you could buy a "universal electric motor" for your household
[09:13:35] <veverak> still nothing I would want
[09:13:38] <veverak> :)
[09:13:44] <robotustra> as you wish
[09:13:50] <deshipu> it could do everything -- chop your vegetables, do the washing, massage your back and vacuum
[09:13:53] <robotustra> desire is in the brain
[09:14:10] <robotustra> deshipu: you just waste your time
[09:14:17] <deshipu> somhow nobody sells those universal electric motors anymore
[09:14:24] <robotustra> you are not understand the value of your time
[09:14:59] <robotustra> because motor itself does not save your livetime
[09:15:04] <robotustra> lifetime
[09:15:07] <deshipu> walking the two steps to my fridge for a beer keeps my backbone healthy
[09:15:14] <veverak> exactly
[09:15:18] <veverak> overautomatization sucks
[09:15:22] <veverak> you forgot how to move etc..
[09:15:25] <veverak> :)
[09:15:34] <robotustra> you can go out and pur while the robot cleaning
[09:15:43] <robotustra> run*
[09:16:00] <robotustra> to make yourself helthy
[09:16:07] <deshipu> that's what I do when I let the roomba clean
[09:16:11] <veverak> :)
[09:16:36] <robotustra> does roomba do surveillance of your house?
[09:16:36] <deshipu> and look, it doesn't have to stop cleaning when I want a beer
[09:16:51] <deshipu> I'd rather not have my house surveiled, thank you very much
[09:17:02] <veverak> deshipu: anyway, how do you plan to combine usb cam and usb wifi?
[09:17:37] <deshipu> veverak: pants
[09:18:10] <veverak> pants?
[09:18:11] <deshipu> veverak:
https://hackaday.io/project/8678-rpi-wifi
[09:18:36] <deshipu> veverak: I will probably include that on tote's pcb
[09:20:57] <veverak> looks cool
[10:43:47] <veverak> awesome
[10:43:52] * veverak likes ROS even more
[10:43:54] <veverak> :)
[10:44:08] <veverak> and good news is that my code works like it should
[10:49:44] <robotustra> and what it should do?
[10:57:37] <veverak> add "naive" speed control for PWM servos, ability to block some servos on command (so rest of app won't move it when I don't want to) and servos properly react when you change config
[10:57:47] <veverak> especially they re-send signal on "trim" change
[11:39:06] <flyback> oh well veverak another .cz person
[11:39:30] <flyback> my condolences on the loss of the pnumatic post back in 2003 or so
[11:39:42] <flyback> that was a national treasure :/
[11:39:44] <flyback> sad :/
[11:40:45] <flyback> I did hear some rich guy bought it and planned to restore it
[11:41:23] <veverak> pneumatic post?
[11:41:24] <flyback> rue_house, you should read up on it
[11:41:25] <veverak> waT?
[11:41:27] <veverak> ;D
[11:41:42] <flyback> lemme find wiki
[11:42:10] <flyback> https://en.wikipedia.org/wiki/Prague_pneumatic_post
[11:42:20] <veverak> whatever
[11:42:38] <flyback> that was a pretty cool system they had
[11:42:51] <flyback> they had their own information superhighway
[11:44:43] <flyback> till flood destroyed it :/
[11:50:17] <flyback> man if that was in my country i'd donate free laber to save it
[11:50:19] <flyback> sad :/
[11:50:56] <flyback> https://en.wikipedia.org/wiki/Prague_pneumatic_post#/media/File:Dmychadlo-ze-30-let.jpg
[11:51:04] <flyback> love the total loss oilers
[14:14:29] <nos> https://www.youtube.com/watch?v=pGag2fVj5Xg
[14:14:36] <nos> Sling and Rigging
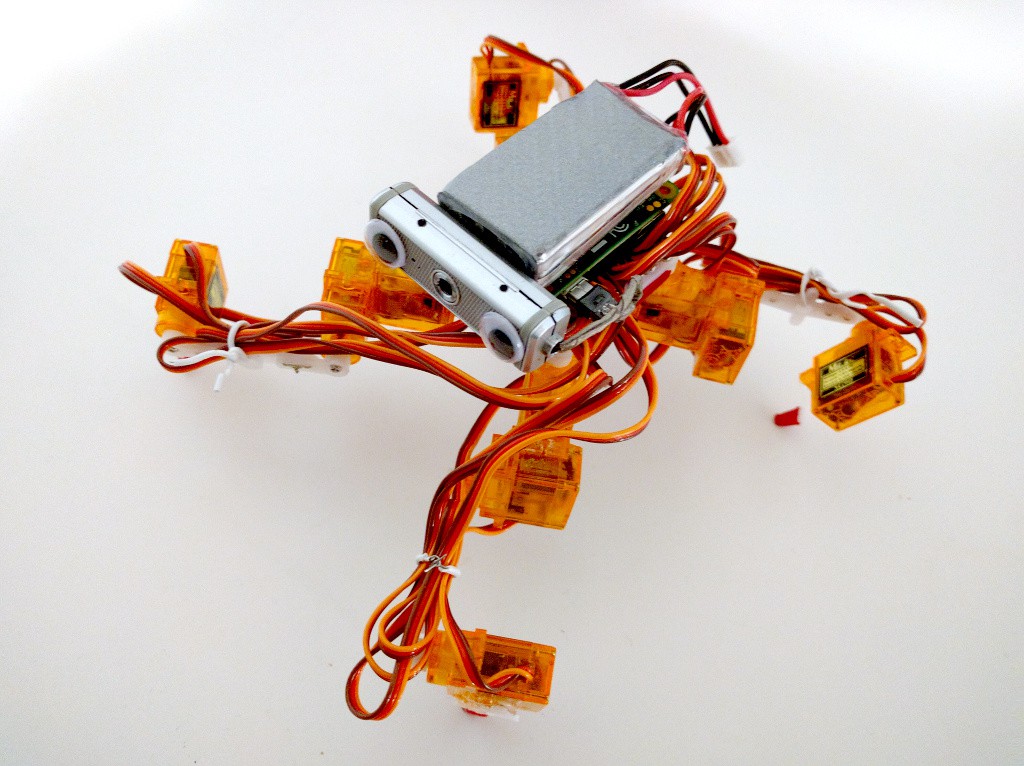
[15:03:18] <deshipu> https://cdn.hackaday.io/images/3212171454876609749.jpg <-- got the camera attached
[15:08:31] <veverak> nice! :)
[15:11:52] <nos> nyehe, googly eyes
[15:12:36] <deshipu> why, of course
[15:27:44] <robopal> deshipu, haha cute :D
[16:34:14] <rue_house> nos, DAMN YOU NOW i'M VERSED IN SLING INSPECTION
[16:41:39] <Tom_itx> rue_
[16:41:47] <Tom_itx> you ever use programmers notepad?
[17:47:15] <veverak> is it usuall in ros
[17:47:19] <veverak> to write simple clients for your nodes?
[17:47:21] <veverak> :)
[17:47:42] <kiloreux> what do you mean by "usual" ?
[17:47:52] <kiloreux> it all depends on what you want to do
[17:48:08] * veverak got nodes that handles servos
[17:48:09] <kiloreux> if you only want to move it, then your code will be mostly 10 lines of code
[17:48:24] <kiloreux> Yeah ii think it's fine
[17:48:49] <kiloreux> it all depends on the logic and the complexity your are implementing
[17:49:12] <veverak> well, it's complex enough to be separate node
[17:49:27] <veverak> and I suppose making client that will be actually used
[17:49:32] <veverak> will make any changes to it easier
[17:49:34] <veverak> :)
[17:51:01] <veverak> but nah
[17:51:18] <veverak> publishing all servo states on one topic maybe was not the best idea ever
[17:51:21] <veverak> will is how it will work
[18:06:53] <veverak> deshipu: also, have you ever found some fancy materials for quadruped walking algo?
[18:06:56] <veverak> (apart from tote doc)
[18:23:01] <anonnumberanon> veverak> and I have awesome gui to trim it
[18:23:14] <anonnumberanon> garbage, you need a potentiometer to trim things
[18:24:04] <anonnumberanon> It would be garbage trimming with the mouse but if you can use the keyboard keys in small steps then that would be okay probably.
[18:24:52] <veverak> no, I don't want potentiometr
[18:24:59] <veverak> :)
[18:25:15] <veverak> anonnumberanon: got wireless mouse and I can trim with scrollwheel
[18:25:27] <anonnumberanon> Yeah that's nice too.
[18:25:29] <anonnumberanon> heh
[18:25:41] <anonnumberanon> So, you're not saying you made this software, are you?
[18:25:56] <veverak> no, just user of API
[18:25:58] <veverak> :)
[18:27:10] <anonnumberanon> What do you guys use for UART to USB converter?
[18:29:59] <veverak> CP2102
[18:58:04] <Loshki> anonnumberanon: an ftdi thingy. There was a windows driver issue, I forget the details. DTR is nice to have for some processors. Watch out for voltage mis-match issues on the UART side.
[18:59:53] <anonnumberanon> Loshki, I just got one of those, the FTDI kind. Can you just program an AVR right of the bat with it or more connections need be done. It's not necessarily a "programmer" per say..
[19:00:06] <anonnumberanon> ???
[19:06:08] <Loshki> anonnumberanon: Totally depends on what's on the UART end. All the ftdi does is move bytes from one side to the other. With AVRs, this usually means you're typing at a boot loader running from eeprom, which will let you download compiled code. Of course, getting the bootloader on there in the first place will require more than just ftdi, and is usually done by different hardware, lest you have a chicken and egg problem. Does this help?
[19:06:55] <anonnumberanon> Very.
[19:07:06] <Loshki> anonnumberanon: what's on the business end of your ftdi?
[19:07:16] <anonnumberanon> I though an avr didn't need a bootloader.
[19:07:33] <anonnumberanon> Well it's for Atmega328 that's what I work with at the moment.
[19:07:45] <Loshki> I can't speak for them all, this is just how the arduino uno does it, which is atmega328
[19:09:01] <anonnumberanon> Right now my chips have an Arduino bootloader flashed on them. I flashed them with an actual Arduino board. I'd like to get away from that now.
[19:10:41] <Loshki> anonnumberanon: after that, the only alternative is pre-loaded atmegas, or a dedicated chip programmer, afaik.
[19:11:02] <anonnumberanon> Loshki, don't worry I'll read up on all of that.
[19:11:41] <Loshki> There's tons of material, and also #arduino, and if all else fails, ##electronics
[19:12:29] <anonnumberanon> Guess I'll dig into one of these threads:
http://www.avrfreaks.net/forum/how-do-i-get-c-program-my-avr
[19:13:33] <anonnumberanon> But, it kinda seems like a really fun project to make a programmer. Also really lengthy so I'm not sure if I'll do that yet.
[19:13:56] <anonnumberanon> Maybe keep using an Arduino bootloader on a bare chip and load up only C code, if that's possible.
[19:15:50] <Loshki> anonnumberanon: except it's all been packaged for you, by the (horrible) arduino IDE. You load c/c++ into it and it will compile, link, and upload to your arduino. In verbose mode, you can see the cli commands it uses, and make your own Makefiles from them if you hate the IDE, as many do. Quickest way up for a beginner, unlikely to satisfy the more experienced. Your choice.
[19:16:54] <jhylands> anonnumberanon, I use a AVRISP MKII to program bare AVR chips
[19:17:53] <jhylands> http://www.atmel.com/tools/AVRISPMKII.aspx
[19:18:54] <jhylands> but I bought mine years ago
[19:19:24] <jhylands> http://www.amazon.com/Compatible-AVRISP-In-System-Programmer-interface/dp/B00C7VV6E4
[19:19:29] <jhylands> I think that's a clone
[19:20:15] <anonnumberanon> I'm trying to understand the technical learning curve to make my own and how much time it would take to learn how versus the return on time investment.
[19:20:22] <jhylands> when you start with a bare chip, in addition to programming it, you need to set the fuses as well
[19:20:39] <anonnumberanon> Yeah.
[19:20:57] <anonnumberanon> That's at least well covered on Youtube or other sites.
[19:23:39] <Loshki> All my arduinos are clones. I've had good luck with them. Note that clones, particularly of the smaller hobbyist platforms, can be had for dirt cheap. There are also attiny's, if you can get away with them instead.
[19:24:19] <Loshki> anonnumberanon: pm
[19:26:06] <anonnumberanon> prime minister? sure I'll get ready for that job
[19:26:26] <anonnumberanon> gtg back to my job search, where I am slowly learning I have no skills
[19:27:59] <Loshki> anonnumberanon: Silly wabbit. pm means private message
[19:28:21] <anonnumberanon> I'm toying with you Loshki.
[19:28:30] <anonnumberanon> You took.
[19:28:49] <Loshki> Thank god. I thought I'd pulled a complete loser for a moment
[19:30:31] <Loshki> Now you get to worry about that instead
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}