Back
[00:41:21] <Jak_o_Shadows> I might have to do something like this: I use the bench grinder a couple of times a year
http://hostedmedia.reimanpub.com/TFH/tips-app/JUN_2005_014_T_01.JPG
[00:45:05] <Jak_o_Shadows> I'd probably just use a flat it of wood and some F clamps though
[01:10:44] <rue_bed> it might want to try to spin on you
[01:11:01] <rue_bed> I'd hate to have to go thru al lthat to switch tools every time
[01:13:57] <Jak_o_Shadows> Oh yeah, I would just do the bench grinder. TBH, I don't have any other mountable tools
[01:14:10] <Jak_o_Shadows> But you're right, the bench grinder has a lot of rotary inertia
[02:24:58] <Hyratel> clamp it down in two places
[02:32:31] <Jak_o_Shadows> Yeah, or arguably 3.
[02:32:44] <Jak_o_Shadows> I think I will do it, the bench grnder just gets in the way normally
[03:30:08] <Jak_o_Shadows> rue, apparently downdraft systems are a thing in kitchens. Who knew?
[03:33:06] <SpeedEvil> I saw on alibaba a 35kW induction stove the other day.
[03:47:39] <Jak_o_Shadows> I am amazed at the stuff you can buy only
[03:48:16] <SpeedEvil> http://i.imgur.com/9eerqtS.jpg I want to buy
[04:16:46] <Jak_o_Shadows> A cat?
[04:19:19] <deshipu> looks tasty
[07:26:27] <LiohAu> I just saw that picture
http://1u88jj3r4db2x4txp44yqfj1.wpengine.netdna-cdn.com/wp-content/uploads/2015/04/Sheet-metal.jpg of the Fetch robots, and before I saw the baxter :
http://www.technologyreview.com/sites/default/files/images/baxterx910_0_0.jpg and I was wondering why the engineers choosed sheet metal for the 1st one, and tubes for the 2nd one.
[07:27:23] <LiohAu> I mean it's 2 completely different way, and there's probably one which is more profitable than the other
[07:27:32] <deshipu> LiohAu: those first ones look like toilet seats
[07:27:37] <LiohAu> haha
[07:28:12] <LiohAu> well the toilet seats becomes this :
http://1u88jj3r4db2x4txp44yqfj1.wpengine.netdna-cdn.com/wp-content/uploads/2015/04/Fetch.jpg
[07:28:22] <LiohAu> and then thhttp://img-3.gizmag.com/fetch-and-freight.PNG?auto=format&ch=Width%2CDPR&crop=entropy&fit=crop&h=394&q=60&w=700&s=3a2f37c7013b08af7d08954ffefc72e5is :
[07:28:27] <LiohAu> this * :
http://img-3.gizmag.com/fetch-and-freight.PNG?auto=format&ch=Width%2CDPR&crop=entropy&fit=crop&h=394&q=60&w=700&s=3a2f37c7013b08af7d08954ffefc72e5
[07:29:48] <LiohAu> in my opinion it is really profitable to newbies like us (yes you're included in my group :P) to see the underhood of things like this
[07:31:01] <deshipu> LiohAu: I think those robots simply have different carrying strenght and budget requirements
[07:31:27] <deshipu> one of them being an academic toy, and the other designed to do actual work
[07:31:38] <LiohAu> no
[07:31:51] <LiohAu> they are both used for industrial stuff
[07:32:21] <LiohAu> the 1st one being the child of PR2 so probably there's few things that were not thought for an industrial product
[07:33:00] <deshipu> it also depends on what materials and tools they could get
[07:33:20] <deshipu> sheet metal is much easier to make
[07:34:46] <LiohAu> I assume that in both cases they are not doing the structure themselves
[07:36:08] <robotustra> one designer has better imagine how to work with shit metal, anothe how to bend pipes
[07:37:42] <LiohAu> robotustra: so you think that it's only experience of individuals ?
[07:38:51] <LiohAu> for my own robot base i'm wondering wether I should keep my bend pipes or go on sheet metal now :(
[07:39:07] <robotustra> I think so - I'll use pipes and complex 3d printed surfaces
[07:39:43] <LiohAu> but nobody here can answer about profitablity of both?
[07:39:53] <robotustra> an I also use sheet polycarbonate and create 3D structures from it
[07:40:16] <deshipu> LiohAu: by the time you finish your robot, the availability and price of the materials will change 3 times
[07:40:27] <robotustra> shit metal is chipper
[07:40:59] <robotustra> I was working as bender, and bent sheet metal for 8 month
[07:41:03] <LiohAu> robotustra: you talk about the material ? or material + manufacturing processes
[07:41:14] <robotustra> both
[07:41:29] <deshipu> robotustra: is your name Rodriguez?
[07:41:34] <LiohAu> :d
[07:41:46] <LiohAu> what's that question lol
[07:42:00] <LiohAu> robotustra: says he is from canada IIRC
[07:42:15] <LiohAu> said*
[07:42:19] <deshipu> http://2.bp.blogspot.com/-Tz0jh270BOA/T1Kj8TNkpXI/AAAAAAAAA5Q/viPar3WHw0g/s1600/Bender%2Bcampaign.jpg
[07:42:32] <LiohAu> HAHA
[07:42:36] <LiohAu> futurama lolz
[07:47:31] <LiohAu> deshipu: you vexed him :p
[07:58:09] <jhylands> I'm from Canada
[07:58:49] <robotustra> no, I'm busy
[07:58:57] <robotustra> programming
[07:59:27] <robotustra> if I'll not write programs I will be kicked and go back to bending machine
[07:59:48] <robotustra> it was my 2nd job in Canada - bender for 8 month
[07:59:48] <deshipu> I should do that too
[08:00:11] <deshipu> Programming! \(ⁿ∞ⁿ)/
[08:00:41] <deshipu> _(ˣ∞ˣ)_ Debugging...
[08:01:14] <jhylands> I need to hack in a current sensor with micropython to see if I can measure force on a motor
[08:01:35] <deshipu> adc + resitor?
[08:01:40] <deshipu> resistor
[08:01:48] <deshipu> or something more sophisticated?
[08:01:52] <jhylands> yeah, its a 5 volt sensor, so I need a voltage divider
[08:02:06] <jhylands> I have a current sensor from Sparkfun
[08:02:12] <robotustra> hm, my i2c current sensor has not arrived yet
[08:02:20] <jhylands> this one is analog
[08:02:30] <jhylands> but the output is centered on 2.5 volts
[08:02:32] <deshipu> I'm playing with this:
http://paste.sheep.art.pl/e00620b0-ea81-4ac8-9c91-bec247f55e02/%2Binline
[08:02:38] <deshipu> but I doubt I will use it for a robot
[08:02:41] <jhylands> so it will almost certainly go over 3.3 volts
[08:02:41] <veverak> nice! :D
[08:02:59] <veverak> hmm i2c sensors
[08:03:12] * veverak would like i2c chip that could read analog with 2.54mm pinout
[08:03:27] <robotustra> piggy printer
[08:03:38] <veverak> or chip on pcb with 2.54mm pinou
[08:03:41] <veverak> t
[08:05:08] <jhylands> veverak,
https://www.adafruit.com/products/1083
[08:05:22] <jhylands> they also have a 16 bit version
[08:05:50] <veverak> awesome
[08:05:59] <jhylands> https://www.adafruit.com/products/1085
[08:06:34] <jhylands> slower, but higher precision
[08:09:08] <veverak> https://www.adafruit.com/products/1449 interesting
[08:09:16] <robotustra> I recently worked with 3.3 sensor from 5.0V controller
[08:09:23] <robotustra> terrible
[08:09:35] <deshipu> veverak: you can make your own easily
[08:09:47] <deshipu> veverak: just add a wire to the center of the pot
[08:09:48] <robotustra> but finally did it
[08:09:49] <veverak> deshipu: just add wire on proper place?
[08:09:52] <veverak> :)
[08:09:55] <veverak> yeah, thought so
[08:09:59] <deshipu> I did that
[08:10:17] <deshipu> but arduino's adc is quite noisy
[08:11:04] <veverak> https://www.adafruit.com/products/815
[08:11:05] <SpeedEvil> Often, oversampling can work fine
[08:11:12] <veverak> yeah, been thinking about using that in tote instead of arduino
[08:11:15] <veverak> hmm
[08:11:25] <robotustra> I decided not to do ADC for each motor
[08:11:40] <robotustra> with current sence
[08:11:46] <robotustra> too complicated
[08:12:05] <veverak> deshipu:
https://www.adafruit.com/products/1083 ?
[08:13:41] <deshipu> veverak: except you need 12 channels :P
[08:13:51] <veverak> I know... :(
[08:13:57] <veverak> or, do I?
[08:14:00] <veverak> :)
[08:14:05] <robotustra> I have to install gyro on the base and do some locomotion :)
[08:14:22] <jhylands> pretty sure the pyboard has at least 12 ADC inputs
[08:14:24] <veverak> anyway, that 12-bit 16 channel servo driver looks nice
[08:14:33] <deshipu> jhylands: the pyboard also has an accelerometer
[08:14:55] <robotustra> accelerometer of acc+gyro?
[08:15:02] <robotustra> or*
[08:15:06] <jhylands> no, just a 3-axis accel
[08:15:12] <deshipu> veverak:
https://hackaday.io/project/9131-servo-controller
[08:15:18] <deshipu> veverak: cheaper, does 18 channels :P
[08:15:47] <robotustra> for robot skin I plan to use 64 channel ADCs
[08:15:54] <deshipu> veverak: I have that adafruit driver, it's a power driver for RGB LEDs
[08:16:00] <deshipu> veverak: that
[08:16:07] <deshipu> veverak: that's why it's so expensive
[08:17:45] <veverak> deshipu: resolution of your thing?
[08:17:48] * veverak can't find i
[08:17:51] <veverak> t
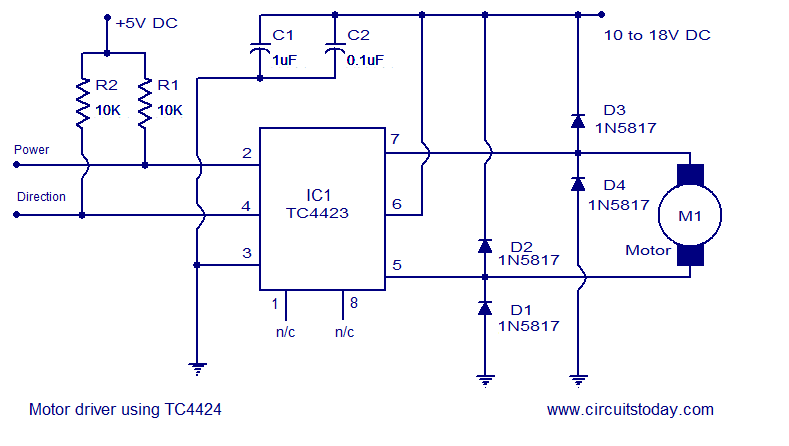
[08:19:05] <robotustra> did I show this?
http://i.imgur.com/6KELyUf.jpg
[08:19:53] <jhylands> you did, although you didn't say what it was
[08:20:11] <robotustra> it's drivers for dc motors
[08:20:15] <veverak> nah
[08:20:16] <robotustra> for hand
[08:20:23] <robotustra> tc4424
[08:21:38] <robotustra> this schematic times 6
http://www.circuitstoday.com/wp-content/uploads/2011/01/motor-driver-using-TC4424.png
[08:22:20] <jhylands> how much current?
[08:23:00] <robotustra> driver can handle 3A, but I'll use it at 0.5A max
[08:24:05] <robotustra> anyway it will be pulsed current
[08:24:39] <deshipu> veverak: I would need to count...
[08:28:25] <veverak> deshipu: 12-bit sounds interesting :)
[08:28:40] <veverak> but question is if it matter iwth g9 servos we got
[08:31:33] <deshipu> veverak: I have 2 clicks per 1us
[08:31:36] <deshipu> veverak: os 0.5us
[08:31:38] <deshipu> so
[08:32:08] <deshipu> however, right now I specify the position in us
[08:32:21] <deshipu> so the practical resolution you get is 1us
[08:33:05] <veverak> with arduino?
[08:33:07] <veverak> AWESOME
[08:33:10] <veverak> :)
[08:33:12] <veverak> damn it
[08:33:26] * veverak doesn't have proper way to manage such a informations
[08:33:29] <veverak> hmm
[08:33:37] <deshipu> for a standard SG90 servo
[08:33:39] <veverak> (like there is project XY or item XY in shop XY that you want to use)
[08:33:50] <deshipu> that's 0.1°
[08:33:58] <veverak> that's more than enough :)
[08:34:17] <veverak> afaik normal arduino got 1us ?
[08:34:20] <veverak> *4us
[08:34:21] <SpeedEvil> http://www.bidspotter.co.uk/en-gb/auction-catalogues/bpi-associates/catalogue-id-bp10865/lot-a03bcde1-ec37-4ebf-8d29-a58600c143c2
[08:34:25] <SpeedEvil> Lot 68 - Quantity of 13920 Batteries 450 mAH 58 x 240
[08:34:42] <deshipu> those servos have dead bands that are much larger
[08:35:30] <veverak> yeaj
[08:35:39] <veverak> yeah
[08:35:41] <veverak> hmm
[08:35:44] <veverak> nah
[08:35:49] * veverak lately got a lot of problems with tote being small
[08:36:04] <veverak> ok
[08:36:08] <deshipu> like what?
[08:36:12] <veverak> problem is that I want a lot of things in it :D
[08:36:20] <deshipu> make them replaceable
[08:36:32] <veverak> deshipu: ie B+ raspi would be much better choice as brain instead of A+
[08:36:50] <veverak> with B+ you can run system from flash drive, which can handle much more than microsd card
[08:36:59] * veverak burned 1 allready, and second sd card is bricked propably too
[08:37:08] <deshipu> veverak: laser-cut or 3d-print a larger body
[08:37:18] <veverak> yeah, thinking about it
[08:37:22] <deshipu> veverak: as long as the weight is reasonable, it should work
[08:37:35] <veverak> point is that I need at first create different pinout board for arduino pro
[08:37:48] <veverak> and stuff
[08:37:54] <veverak> anyway, I will have 12+ servos
[08:37:55] <deshipu> want one of my universal servo breakouts?
[08:38:03] <veverak> so thinking if it woudln't be easier to make it hexapod
[08:38:05] <veverak> :)
[08:38:10] <deshipu> I'm going to FOSDEM now and will meet my co-workers from Brno
[08:38:15] <veverak> hmm
[08:38:17] <veverak> nah
[08:38:21] <veverak> deshipu: propably not
[08:38:30] <veverak> I believe I should be able to make solution for this
[08:38:35] <veverak> that would be really easy to replicate
[08:38:43] <veverak> instantly
[08:38:55] * veverak doesn't like to wait for pcbs when it can be avoided
[08:40:01] <deshipu> I won't use all of my boards
[08:40:09] <deshipu> and you could just pick it up at the redhat office
[08:40:12] <deshipu> on purkynova
[08:41:09] <deshipu> veverak: there is always also this method:
http://sheep.art.pl/Servo%20Board%20for%20Pro%20Mini
[08:43:16] <veverak> nice
[08:43:18] <veverak> :)
[08:44:34] <deshipu> or you could make it bigger and make it properly
[08:44:36] <deshipu> without hacking
[08:51:12] <veverak> "bigger" is really problem here"
[08:51:38] <veverak> :)
[08:54:41] <veverak> deshipu: hmm
[08:54:59] <veverak> I suppose with source that should be abel to hold 3A
[08:55:07] <veverak> I can skip the capacitator?
[08:55:08] <Snert> split off the juice and ground - send them elsewhere. That way the signal connections are just 8 wires instead of 24.
[08:57:27] <deshipu> veverak: depends on how fast it can give you the 3A
[08:57:52] <veverak> hmm
[08:58:16] <veverak> 3A continuous, 5A peak for 1s
[08:58:17] <deshipu> start without it and add it later if you need it
[08:58:25] <veverak> yeah, makes sense
[08:58:37] <veverak> it just fell off because of my shitty soldering
[08:58:42] <veverak> one problem less :)
[08:59:03] <deshipu> fewer
[08:59:28] <deshipu> anyways, have you seen the adafruit pi zero contest?
[08:59:59] <deshipu> https://hackaday.io/contest/9326-adafruit-pi-zero-contest
[09:01:45] <veverak> nah
[09:01:47] <veverak> interesting
[09:01:50] <veverak> but nah
[09:01:52] <veverak> time 404 :/
[09:02:02] * veverak still got exams, tuns of things in workd and tons of thigns need to be done
[09:02:05] <veverak> damn it
[09:02:44] <deshipu> don't worry, it will only get worse with age
[09:03:10] <emeraldgreen> deshipu Unless you make yourself some passive income :)
[09:03:23] * veverak got dream now
[09:03:34] <veverak> find a way how to employ people to do "boring part" of my projects
[09:03:37] <veverak> more or less
[09:03:39] <veverak> :)
[09:04:04] <deshipu> become a prof
[09:04:23] <veverak> sounds nice
[09:05:11] <deshipu> students are the perfect cheap labor
[09:05:25] <veverak> yeah
[09:05:31] <veverak> and I would have what they want the most
[09:05:33] <veverak> kredits
[09:05:36] <veverak> :)
[09:05:38] <veverak> *credits
[09:05:40] <emeraldgreen> profs are a recent phenomenon. In 19th century large part of science was done by gentleman scientists, essentially upper-middle class rentiers that were financially independent
[09:06:06] <deshipu> and priests
[09:06:10] <jhylands> damn, I just realized my current sensor is going to need a really well-stabilized 5V power input, and USB does not fit that profile
[09:06:13] <deshipu> for the same reason
[09:06:59] <deshipu> veverak: have you thought about becoming a bishop?
[09:08:27] <veverak> not really
[09:08:44] <veverak> deshipu: but I do like places where "belief in something" is in place
[09:08:48] <veverak> so profesor seems much better
[09:08:51] <veverak> :)
[09:28:11] <veverak> ROBONOVA!
[09:28:16] <veverak> that's the robot we got at school
[09:28:19] <veverak> :)
[09:28:21] <veverak> *uni
[09:28:34] <rue_house> jhylands, high side current sense?
[09:28:49] <deshipu> veverak: AVONOBOR
[09:29:02] <jhylands> https://www.sparkfun.com/products/8883
[09:29:23] <rue_house> ugh one of those
[09:29:29] <rue_house> more noise than signal
[09:29:33] <rue_house> I got a few
[09:29:34] <jhylands> do you know a better one?
[09:29:41] <rue_house> I made my own
[09:30:15] <jhylands> well, I have one I made for measuring current in cell phones
[09:30:30] <jhylands> but it only goes up to a couple amps
[09:30:48] <jhylands> I guess that's probably enough for this, although the motor stall current is 5 amps
[09:30:56] <rue_house> https://hackaday.io/project/296/gallery#74fc55e3f5994963a00d9ed553e1f055
[09:31:19] <rue_house> https://hackaday.io/project/296/gallery#bee37fa277001f7c98dc33a1e79e9879
[09:33:01] <rue_house> somewhere in the logs I mention which amp I used
[09:33:43] <rue_house> the only special part I had was the isolated dc-dc
[09:33:55] <jhylands> https://app.box.com/s/86008jhyh012fsuiwrzoftga2u8ymekf
[09:33:58] <jhylands> that's mine
[09:34:44] <rue_house> it looks pretty smart, whats the logic
[09:34:49] <jhylands> the other problem with mine is it doesn't handle measuring current on voltage over 5 volts
[09:35:15] <jhylands> its an ammeter I designed and built for Mozilla, to measure power consumption on Firefox OS cell phones
[09:35:22] <rue_house> yea, mine rides on the top rail, which can be from 0 to alot
[09:35:29] <jhylands> it uses an ATmega32U4
[09:35:36] <rue_house> ah
[09:35:37] <jhylands> and a high precision 16 bit A/D
[09:35:54] <jhylands> and a very stable 4.2 volt regulator
[09:36:12] <jhylands> but it is designed for single cell lipos
[09:36:34] <rue_house> huh
[09:36:46] <jhylands> the motor in my setup now is 12 volts
[09:37:16] <jhylands> I guess I should hook up my ucurrent gold, and see if I can measure anything
[09:41:50] <rue_house> is it just 12V that your monitoring?
[09:41:56] <rue_house> like, its not 0-12
[09:41:59] <rue_house> just 12
[09:42:27] <jhylands> I'm actually not 100% sure how to do it
[09:42:44] <rue_house> say more
[09:42:46] <jhylands> I want to measure the current a motor is consuming
[09:42:47] <rue_house> ..
[09:42:57] <jhylands> when it isn't running
[09:43:01] <rue_house> ok, does it matter if its high or low side?
[09:43:08] <jhylands> but force is being applied to the output shaft
[09:43:18] <jhylands> I'm using locked anti-phase PWM
[09:43:20] <rue_house> so its generating power
[09:43:26] <rue_house> ah
[09:43:27] <rue_house> aaaah
[09:43:28] <rue_house> ok
[09:43:38] <jhylands> no, I'm trying to build a simple compliant motor
[09:43:42] <rue_house> are you switching the high or low side?
[09:44:00] <jhylands> you mean for PWM?
[09:44:12] <rue_house> yea, or is it a totem driver
[09:44:22] <rue_house> full or half bridge
[09:44:29] <jhylands> https://www.pololu.com/product/2992
[09:44:31] <rue_house> or not :)
[09:44:45] <rue_house> aaah
[09:44:53] <jhylands> it has built-in current sense, but it doesn't appear to be accurate enough at idle
[09:45:06] <rue_house> so, your using forward and reverse but not braking, right?
[09:45:09] <jhylands> signal gets lost in the noise, which is what I kind of expect to have happen here
[09:45:31] <jhylands> well, locked anti-phase basically does braking all the time
[09:45:49] <rue_house> the controller should have 3 modes, forward, reverse, and brake
[09:46:05] <rue_house> you cant measure the current during brake with it becasue its an internal current loop
[09:46:18] <jhylands> ah, okay
[09:46:24] <jhylands> so I need to switch to plan 2 then
[09:46:52] <rue_house> but it sounds like your going between forward and reverse driving
[09:47:06] <jhylands> this is for a pulley-line system, so I'll add an idler pulley with a spring and measure the deflection
[09:47:16] <jhylands> I'm building a compliant tether
[09:47:29] <jhylands> when you pull on the wire, the motor spools more tether out
[09:47:36] <jhylands> when you release tension, it pulls it in
[09:47:48] <rue_house> contstand current srouce
[09:47:53] <rue_house> asdfjkhasfd
[09:48:13] <rue_house> the current sets the force
[09:48:18] <veverak> done
[09:48:22] <rue_house> led driver
[09:48:32] * veverak finally got some basic workflow to store interesting info
[09:49:19] <jhylands> rue_house, I don't understand
[09:49:34] <rue_house> dc motors have force proportional to current
[09:49:40] <jhylands> yes
[09:50:14] <rue_house> if you run a constant current thru a motor, it will apply a constant force in a direction, regardless of which way the shaft is going
[09:50:39] <rue_house> so it'll act like an infinitly windable spring
[09:51:10] <rue_house> you can have a constant current source for the forward direction on a motor, and pull it backwards
[09:51:23] <rue_house> it'll maintian the constant force even tho its being backdriven
[09:51:36] <emeraldgreen> http://scs.ryerson.ca/~aharley/vis/conv/ cool visualization of a digit-recognizing convnet
[09:52:14] <jhylands> yeah, but I need a strong enough motor to wind the tether in
[09:52:30] <jhylands> when needed
[09:53:00] <rue_house> is it always supposed to pull back on the teather or just when its slack?
[09:53:19] <jhylands> basically when it is slack, the system should remove the slack
[09:53:34] <jhylands> its a balancing act
[09:53:35] <rue_house> so its always holding a designed tension on it
[09:53:45] <jhylands> I'm going to use a PID loop on the motor
[09:54:01] <jhylands> I was hoping to use measured current as the feedback
[09:54:07] <rue_house> from what I hear, I'd just use a constant current source
[09:54:39] <jhylands> to drive the motor?
[09:54:53] <rue_house> yup
[09:54:55] <jhylands> or to power the h-bridge?
[09:55:27] <rue_house> based on 'so far' I'd use a constand current led driver (probably) on the motor
[09:55:38] <rue_house> cant TYPE!
[09:56:11] <rue_house> the votlage accross the motor will tell you if its winding in or out
[09:56:16] <rue_house> +- offset
[09:56:37] <jhylands> it certainly won't be winding in unless I am powering it to do so
[09:56:49] <rue_house> you have an expensive bench supply, play with it
[09:57:09] <rue_house> but you seem to say you dont want the line to go slack
[09:57:24] <jhylands> yes - the other end of the tether will be attached to a quadcopter
[09:57:39] <jhylands> so as it moves up or down, that will affect the tension on the line
[09:57:50] <rue_house> in order for the line to not go slack, you need SOME retraction force against it
[09:58:28] <jhylands> I think I'll do the spring-lever-pulley system instead
[09:58:35] <jhylands> its more clear-cut how it works
[09:58:35] <rue_house> and that dosn't matter if its your slack sensing pulley or the force from a motor with 50mA across it
[09:59:27] <jhylands> its a balancing act - a certain amount of tension means "length is good"
[09:59:33] <jhylands> more tension means "spool out"
[09:59:39] <jhylands> less tension means "spool in"
[09:59:44] <rue_house> tnsion = force
[10:00:00] <jhylands> that's simple to implement using PID and some way to measure the tension
[10:00:06] <rue_house> in constant current more tension causes the mtoor to be backdriven, spooling it out
[10:00:26] <rue_house> les tension causes the motor to rotate with the applied power, winding it in
[10:00:29] <jhylands> I want the motor to actively spool out the line when the drone is lifting
[10:00:49] <rue_house> you can varry the current on the motor
[10:01:06] <rue_house> if you know you want more or less tension
[10:01:16] <rue_house> do you have a motor?
[10:01:23] <jhylands> yeah
[10:01:27] <rue_house> you have a fancy bench supply
[10:01:28] <rue_house> play
[10:01:33] <rue_house> constant current
[10:01:42] <jhylands> I'll try it
[10:01:46] <rue_house> what is the approx volme of the motor in cm^3
[10:02:41] <jhylands> this is the motor I'm using:
http://www.robotshop.com/en/pololu-12v-301-gear-motor-64-cpr-encoder.html
[10:03:11] <rue_house> oh geared
[10:03:22] <jhylands> yeah, it has to be geared
[10:03:31] <jhylands> it would spool in way too fast otherwise
[10:03:47] <rue_house> the gears will cause too much friction
[10:03:49] <jhylands> I need to keep the max spool rotation to about 250 RPM
[10:04:19] <jhylands> oh, I see - you're talking about essentially using a motor as a generator
[10:04:20] <rue_house> I'd suggest direct drive, with about .15-.3A constant current
[10:04:38] <rue_house> have to go to work bye!
[10:11:39] <Snert> jhylands: does that encoder put off an index?
[10:11:53] <jhylands> its a quadrature encoder
[10:11:58] <Snert> with index?
[10:12:07] <jhylands> no, just the A/B pair
[10:12:35] <Snert> are you gonna gear it down more?
[10:12:40] <jhylands> no
[10:12:47] <jhylands> I want 250 RPM
[10:13:08] <jhylands> https://www.sparkfun.com/products/13063
[10:14:15] <Snert> those things are interesting. I might get the 12wire slipring and leave the unused wires available for future.
[10:14:41] <Snert> or double up for higher current.
[10:14:46] <jhylands> I'll use the 12-wire version eventually, because we want data coming up/down the tether in addition to power
[10:15:05] <Snert> of course.
[10:16:11] <Snert> only 2Amps on the 12wire contacts but that may be sufficient.
[10:16:26] <jhylands> I'll be running 220 AC up the line, so 2 amps is enough
[10:16:49] <Snert> yowsah :)
[10:17:04] <jhylands> I need ~15 amps at 24 volts on the drone
[10:18:57] <Snert> even that exceeds the 3wire slip specs.
[10:19:09] <jhylands> yeah, which is why I
[10:19:14] <jhylands> 'I'm sending up 220 AC
[10:19:52] <jhylands> 220 @ 2 amps == ~18 amps at 24 volts
[10:19:55] <Snert> any chance the drone could carry lipos for major power and 220V backup for the electronics?
[10:20:14] <jhylands> no - they want the drone to stay up for many hours at a time
[10:20:23] <Snert> kinda figgered that
[10:35:12] <SpeedEvil> 240W is nothing for a drone
[10:35:39] <jhylands> its not 240W
[10:35:47] <SpeedEvil> err - 480
[10:36:21] <jhylands> what do you mean "is nothing"
[10:37:33] <SpeedEvil> It is the equivalent of a 6S1800mAh battery
[10:37:43] <jhylands> no it isn't
[10:38:12] <jhylands> the DJI Inspire (which is the drone I'm using right now) has a 4800 mAh 6s battery
[10:38:19] <jhylands> which lasts 18 minutes
[10:38:23] <SpeedEvil> http://www.hobbyking.com/hobbyking/store/__63385__ZIPPY_Compact_1800mAh_6s_40c_Lipo_Pack.html - about 480g
[10:39:33] <jhylands> 4.8 amp-hours, at 24 volts is 115.2 watt-hours
[10:39:50] <jhylands> over 18 minutes, that is 384 watts
[10:40:06] <jhylands> and thats if you drained the battery to zero, which of course you don't do
[10:40:56] <Snert> it's a rock and a hard place.
[10:41:24] <Snert> gotta have power to do anything useful. But that power comes with it's things to deal with.
[10:41:29] <jhylands> I figure on average its probably consuming about 330 watts
[10:43:51] <robotustra> hope my lifepo4 come today
[12:00:18] <LiohAu> robotustra: hope i'll receive mine next week :(
[12:02:11] <LiohAu> anybody can explain me why my alloy plate looks like chocolate at 50°C in the solidworks static analysis i'm working on ? :(
[12:02:27] <emeraldgreen> SW multiplies displacements
[12:02:36] <emeraldgreen> so you can see them
[12:03:07] <emeraldgreen> if they were drawn to scale you probably wouldn't notice this pixel noise
[12:04:11] <LiohAu> emeraldgreen: I don't know if we are talking about the same problem
[12:04:13] <LiohAu> https://www.dropbox.com/s/xi0mhwfwsjo1hpq/mecano.PNG?dl=0
[12:04:19] <LiohAu> my problem is this :P
[12:04:30] <LiohAu> there's no load yet :D
[12:05:21] <LiohAu> so here, you have the result of gravity ^^
[12:05:23] <emeraldgreen> Hmm. haven't seen such results. Maybe it tries to simulate gravity and multiplies the displacement or something
[12:05:37] <LiohAu> oh yeah, it's gravity
[12:05:47] <LiohAu> but why does gravity bend a 500gr alloy plate
[12:05:56] <LiohAu> that's a mystery
[12:14:49] <Snert_> looks like gravity makes those little green trees on the bottom grow really good.
[12:19:46] <LiohAu> Snert: well I don't know what grows where, but I know that it's impossible for these parts to "naturally" bend
[14:11:53] <_davis_> im new to electronics, where can i find a good resource?
[14:17:52] <Snert_> I've seen so many electronics tutorials web sites it's hard to say just 1.
[14:18:02] <Snert_> but google.
[15:14:03] <Hyratel> I'd reccomend Sparkfun.com and Adafruit.com's tutorial sections
[15:14:24] <DagoRed> he left
[15:14:29] <Hyratel> damn
[15:14:40] <DagoRed> I know.... impatient people anymore.
[16:37:00] <veverak> hmm
[16:37:15] <veverak> deshipu: I have finished the part that connects to arduino
[16:37:23] <veverak> and makes "range" of Servo objects that represents each servo
[16:37:30] <veverak> thinking about how to create proepr test suite
[16:48:36] <deshipu> mock it :)
[16:51:18] <deshipu> I'm struggling with tote0 now
[16:51:34] <veverak> ?
[16:51:37] <deshipu> raspberry pi really likes to restart for no reason
[16:51:40] <veverak> :D
[16:51:48] <deshipu> just a small power surge from the servos
[16:52:08] * veverak will write some unittests
[16:56:41] * deshipu looks as tote0 balls up into a tangle of servos
[16:57:05] <deshipu> I didn't realize those servos go that far
[16:57:16] <veverak> :)
[16:58:04] <deshipu> actually, they shouldn't, it's all wrong
[16:59:54] <veverak> nah
[16:59:56] <veverak> it feels bad
[17:00:54] * veverak wrote unittest to send command to servo controller
[17:01:11] <veverak> and now I want to write to stdout "user, please check if you servo moves"
[17:01:13] <veverak> :)
[17:01:54] <veverak> it feels bad
[17:02:32] <deshipu> you don't wrtie unit tests for hardware
[17:02:43] <deshipu> mock the hardware
[17:02:54] * veverak needs test to test the hardware
[17:03:08] <deshipu> you can't automate that
[17:03:23] * veverak wants manualy launched tests for that of some sort
[17:27:37] <veverak> hmm
[17:27:41] * veverak send 1500 to all servos
[17:27:43] <veverak> it's trembling
[17:47:46] <flyback> aoyue 2930 vs hakko fx-888
[17:47:57] <veverak> ok
[17:48:04] <veverak> deshipu: is there some way to reduce the noise it makes?
[17:48:09] <veverak> in some positions it's terrible
[17:48:24] <veverak> anyway, it accepts messages to setup servos properly
[17:48:43] <flyback> hello rue_*.* ltns
[17:49:33] <veverak> P.S: noise when it's not moving :
[17:49:35] <veverak> :)
[17:51:25] <veverak> ok
[17:51:36] <veverak> arduino + Servo library + cheap servo = crappy solution
[17:51:50] <veverak> (concernig servo shaking on 0 psoition)
[17:51:53] <veverak> (0 = middle)
[17:55:39] <Snert_> maybe a better servo wouldn't jitter.
[17:56:29] <veverak> also maybe better PWM generator than arduino with standart library woudln't jitter
[17:56:32] <veverak> :)
[17:56:39] * veverak suspect both can be equaly bad for this
[17:57:07] <Snert_> my money is on crappy servo though it could be more.
[17:57:22] * veverak knows arduino makes cripple pwm signal
[17:57:43] * veverak is more like: it's bad pwm signal and maybe servos too
[20:43:05] <rue_house> jhylands, did you work out passive compliance?
[20:43:38] <jhylands> I got my new motor, and it seems to work with the current sensor on the hbridge
[20:44:04] <rue_house> but do you understand passive force compliance
[20:44:07] <jhylands> I get a reading of about 50 when it is at rest, and I get between 80 and 100 when I'm pulling on it
[20:44:23] <jhylands> I can't use a non-geared motor, so its a non-starter
[20:44:39] <rue_house> but do you understand passive force compliance?
[20:44:55] <jhylands> if that is what you were describing, then yes
[20:54:31] <rue_house> remember, this has been done forever, computers needed to manage the tension on their tapes back in the magnetic tape days
[20:55:30] <rue_house> https://www.youtube.com/watch?v=Nq3mNYKR7FM
[20:55:35] <rue_house> thats what I was looking for
[20:56:29] <jhylands> I have a hard speed limit on the tether drum of 250 rpm
[20:56:37] <jhylands> so non-geared motors are just not an option
[20:57:05] <rue_house> what if the drone comes in faster than that?
[20:57:15] <jhylands> then there will be slack in the line
[20:57:40] <jhylands> if I reel it in faster, the slip ring may lose power, which would be far more catastrophic
[20:58:16] <jhylands> we will have to engineer the system so the drone doesn't come down faster than that
[20:59:37] <rue_house> ~4 rev/sec
[20:59:40] <rue_house> wow thats slow
[21:00:46] <jhylands> if the reel is 6" in diameter, that's about 75 inches per second
[21:01:31] <rue_house> 78.54"/sec
[21:02:38] <jhylands> 6 - 6.5 feet per second
[21:02:57] <jhylands> that's a ten second rewind for a 60' tether
[21:03:02] <jhylands> which is entirely reasonable
[21:03:56] <rue_house> suppose I need a new switching controller for my new power supply, ho hum
[21:19:00] * flyback bites rue_house
[21:19:02] <flyback> ltns
[21:20:40] <rue_house> dont make me put my boots on fly
[21:20:49] <rue_house> cause I know you want it
[21:21:21] <rue_house> I'll hear what you say, lame or awesome alike
[21:21:36] <flyback> bmcc
[21:21:37] <flyback> :D
[21:21:39] <flyback> fine
[21:21:56] <rue_house> bmsma?
[21:22:01] <flyback> heeh
[21:22:17] <flyback> how you been?
[21:22:30] <rue_house> meh, I'm older and closer to death
[21:22:37] <flyback> same
[21:22:44] <flyback> 42 in march
[21:22:47] <rue_house> I play whe I get the chance
[21:23:05] <flyback> im spending the next year dumping out most of my old stuff
[21:23:13] <flyback> and doing my data recovery project
[21:23:14] <flyback> sdr playing
[21:23:27] <flyback> getting a new iron to replace my aoyue 35w and sparkfun 50w both suck
[21:23:45] <flyback> debating hakko fx-888d vs aoyue 2930 which is their own design on par
[21:24:12] <flyback> still nursing a mothercanucking arm injury 3 weeks since slipping on ice and crashing down on my shoulder
[21:26:27] <flyback> whole neighbor heard me scream
[21:26:31] <flyback> FUCKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK
[21:26:32] <flyback> FUCKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK
[21:26:35] <flyback> for 20 mins
[21:26:48] <flyback> thought I had dislocated it or shattered a bone
[21:27:04] <flyback> when I finally was able to get up my arm was twitching like a beheaded chicken
[21:27:29] <flyback> not fun
[21:27:33] <flyback> watch yourself dude
[21:27:54] <flyback> I found out they make these stretch on rubber things with spikes on them
[21:28:04] <flyback> if you don't want to change your shoes but not end up on your ass
[21:28:09] <flyback> so I got some
[21:29:23] <flyback> ugh my arm is all buggered up
[21:29:52] <flyback> if I lay on my back and point it straight up I get pain under my armpit like a biting pinch and feel a bone slide and strike a nerve
[21:29:56] <flyback> also right above elbow
[21:31:07] <flyback> so you kinda inspired me for future reference
[21:31:11] <flyback> all your ductwork stuff
[21:31:27] <flyback> our brand new a/c wasn't getting th ehouse at set temp and not turning off at night
[21:31:51] <flyback> I spend 6 months scrubbing the outside of the 50 yr old ductwork with TSP then rolling out 4 rols of $17 metal tape on almost all the seems
[21:31:54] <flyback> works way better now
[21:32:07] <flyback> also got rid of the duct going to the garage that was stupid
[21:32:25] <flyback> it's cheaper to buy a ventless 10,000 btu gas heater for $100 if I want to warm the garage in winter
[21:32:33] <flyback> than make a house furnace/ac handle it
[21:33:01] <flyback> oh word of advice
[21:33:04] <flyback> that metal tape
[21:33:18] <flyback> don't use on panels etc you need to open 1+ times a year
[21:33:25] <flyback> just use a good hvac duct tape for those
[21:34:39] <flyback> also got rid of the thin filters that were stuck in a slit cut in the ductwork (stupid stupid bypass), got rid of 2 gaping holes in the cold air returns, and converted to box filters using the old electronic air cleaner housing from the last furnace
[21:35:11] <flyback> how did your project turn out?
[21:37:23] <flyback> that 1-wire and other shared buses are pretty slick
[21:54:05] * flyback pokes rue_house
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}