Back
[02:40:12] <Deejay> moin
[02:40:35] <XXCoder> https://dl.dropboxusercontent.com/u/53432577/36140_slide.jpg heh
[05:39:58] <Jymmm> Anyone happen to know what these are used in?
http://www.newegg.com/Product/Product.aspx?Item=9SIA5D52NP8796
[05:44:21] <jthornton> any place you want heat
[05:58:40] <archivist> jthornton, methinks this needs fixing
http://linuxcnc.org/docs/html/gcode/overview.html#_logging it seems to be written to during the opening phase during syntax check in axis, not when run later
[05:59:26] <archivist> or the code needs fixing :)
[06:18:16] <jthornton> the (LOG, is not done when it's ran?
[06:22:50] <archivist> no it gets done earlier
[06:24:05] <archivist> I had the output file open, got the notification it was changed before the code had got past the first move, checked the file and it was completed
[06:24:51] <archivist> so the lines were written before my subroutine ran
[06:25:52] <jthornton> that's strange, if your logging a probe move that would never work
[06:26:07] <archivist> I wanted to control what and when got logged rather than the blunderbuss method of sampler and halsampler
[06:27:39] <jthornton> just looking at smartprobe.ngc in the examples and it uses LOG
[06:27:58] <archivist> not looked at that
[06:35:40] <archivist> it is running on an older version 2.5.4, and smartprobe.ngc is on there
[06:37:32] <cncbasher> jt : did you get it sorted ?
[06:37:48] <cncbasher> laptop crashed on my last night
[06:38:03] <jthornton> lol, I forgot to uncomment the addf line for the watchpuppy
[06:38:09] <cncbasher> overheated and switched off , think the fans may need cleaning or changing
[06:38:31] <cncbasher> arh
[06:39:06] <jthornton> Peter was able to decipher the error and point me in the correct direction
[06:44:55] <jthornton> now I need to get the VFD hooked back up
[06:54:47] <cncbasher> glad your back up and running thats the main thing
[07:02:09] <jthornton> well not back up yet but at least Linuxcnc is not crashing
[07:27:35] <DIYtryin> Hi guys. I created a pyVCP sidepanel with a button on it and I'd like to switch a relay with it (arduino in between)
[07:27:57] <DIYtryin> But I've got no idea how to.. Any suggestions?
[07:28:33] <jthornton> how to do what part?
[07:29:21] <DIYtryin> To be honest.. I don't know what parts there are(A)
[07:29:55] <jthornton> hal connections, physical connections etc
[07:30:53] <jthornton> hal could be something like this net myrelay pyvcp.mybutton => parallelportpin
[07:31:03] <archivist> we dont know hou you connect the aahguino
[07:31:34] <DIYtryin> I think I got the physical connections in order. pc(running linuxcnc) connected with arduino via usb
[07:31:52] <archivist> jthornton, methinks the log in a subroutine is interpreted early
[07:32:06] <archivist> usb!
[07:32:13] <DIYtryin> jep
[07:32:59] <archivist> is this an input device or what
[07:33:12] <jthornton> the smartprobe.ngc uses log in a subroutine
[07:33:52] <archivist> I open the log in the subroutine, I dont think smartprobe does
[07:34:41] <archivist> might have found a bug !
[07:34:52] <jthornton> yea, smartprobe opens the log then runs the sub then closes it
[07:35:29] <jthornton> sounds like one, how to demonstrate in a short G code... thinking
[07:36:18] <DIYtryin> at the moment I've got the pyvcp panel, and a python script waiting for input. Now need to find a way to let them talk with oneanother
[07:38:09] <archivist> jthornton,
http://paste.ubuntu.com/14213899/
[07:38:39] <archivist> logappend or logopen
[07:38:43] <jthornton> I've not seen ubuntu pastebin, nice
[07:40:09] <archivist> was just hacking that and trying it, oops, while it is on line 6 lining up the worm the logfile is finished :(
[07:40:59] <archivist> _pass is set to 2 in the output
[07:54:42] <jthornton> I tried to do a simple log and it worked as expected
http://paste.ubuntu.com/14213993/
[07:55:15] <archivist> that wont show it
[07:57:39] <archivist> have the log file open in gedit, have something slow before the ocode, start the program, gedit shows the file updated before the slow part is finished prior to the ocode call
[07:57:57] <jthornton> ok
[07:58:52] <archivist> gedit is showing the update has happens while my code is still at line 6
[07:59:34] <archivist> and I can reload the file and see the output still during line 6
[08:00:18] <jthornton> http://paste.ubuntu.com/14214034/
[08:00:57] <jthornton> you going to file a bug report?
[08:01:33] <archivist> I would have to remember my sourceforge login :)
[08:02:10] <jthornton> I have the same problem...
[08:02:38] <jthornton> jepler mentioned something about using github as a bug tracker
[08:02:45] <archivist> I saw that
[08:03:10] <archivist> gihub would be even harder to remember
[08:03:27] <jthornton> http://paste.ubuntu.com/14214055/
[08:05:20] <archivist> I suppose I could post something to the dev list :)
[08:09:29] <jthornton> I found my password
[08:09:39] <jthornton> https://sourceforge.net/p/emc/bugs/452/
[08:10:55] <archivist> heh just poked the list too :)
[08:11:34] <archivist> my second code bug :)
[08:16:25] <archivist> my password had expired!
[08:16:45] <archivist> had to change to a new one
[08:17:16] <jthornton> I changed it to probe and get an error I don't understand start point too close to probe point
[08:17:32] <jthornton> G0 X0
[08:17:38] <jthornton> G38.2 X2
[08:18:05] <archivist> probing needs sensible moves iirc
[08:18:10] <enleth> oh damn, guys from another hackerspace in Poland decided to stream their 3D printer on a sex webcam site - and they quickly got more vieweres than actual strippers, then even some money for answering technical questions asked by the viewers
[08:18:36] <jthornton> how is that not sensible?
[08:18:55] <archivist> diameter of probe ball
[08:19:37] <jthornton> I'm just trying to test logging with a probe move
[08:19:41] <jthornton> not really probing
[08:19:52] <archivist> that would be ok for a 1mm ball but a fail for a 5mm ball
[08:20:33] <jthornton> linuxcnc won't know what size ball I have
[08:20:50] <archivist> to me that is an error
[08:20:50] <jthornton> and that is 2" not 2mm
[08:22:28] <jthornton> http://paste.ubuntu.com/14214154/
[08:23:30] <jthornton> I don't understand why the second program throws and error
[08:23:38] <archivist> you have three identical probe moves
[08:23:50] <jthornton> clearly it moves to X0 then probes up to 2"
[08:24:03] <jthornton> perhaps I see the error now
[08:24:45] <jthornton> three probe moves to the same place with no move away first...
[08:24:49] <jthornton> dumb guy
[08:26:03] <jthornton> ok because it is a probe move the log file is not updated because it can not know the probe position
[08:26:13] <jthornton> it is opened at the start of the file
[08:26:39] <jthornton> and logopen clears the contents of the file
[08:27:04] <jthornton> so I assume if it can figure out the answer then the log is created and updated?
[08:27:55] <jthornton> test this after converting it to mm
http://paste.ubuntu.com/14214191/
[08:31:31] <archivist> I dont have a working xyz as it is a test jig for the rotary, was about to add the encoder inputs
[08:32:57] <jthornton> convert it to A
[08:33:25] <jthornton> the key is the probe move can't be figured out in advance but a G0 move can
[08:33:45] <jthornton> DIYtryin: you still here?
[08:34:10] <DIYtryin> jep
[08:34:31] <archivist> jthornton, just found a doc bug In the VAR file scheme, the first variable number stores the X offset, the second the Y offset and so on for all six axes. There are numbered sets like this for each of the coordinate system offsets.
[08:34:44] <archivist> six->nine
[08:35:19] <jthornton> used to be six, I'm on it like a chicken on a june bug
[08:35:25] <archivist> :)
[08:35:53] <archivist> spotted in the google result snippet
[08:36:41] <DIYtryin> I'm trying to collect my thoughts jthornton
[08:37:54] <jthornton> I just had a thought and if the device can be seen like a joystick then it might work
[08:38:47] <archivist> as in, an input device
[08:38:59] <jthornton> yea
[08:39:20] <jthornton> DIYtryin:
http://wiki.linuxcnc.org/cgi-bin/wiki.pl?Simple_Remote_Pendant
[08:39:39] <DIYtryin> thanks. Will look into it right now
[08:39:58] <archivist> what are you trying to drive
[08:42:45] <DIYtryin> pc running linuxcnc -> pyvcp sidebar (with a button) -> arduino uno (connected with usb) -> relay
[08:43:03] <archivist> and what else
[08:43:44] <DIYtryin> a fancy cnc machine of my employer, used for printing carbon fiber
[08:43:53] <DIYtryin> but that works
[08:44:21] <DIYtryin> does that make sense?
[08:44:29] <archivist> ran out of ports on the main interface?
[08:45:30] <DIYtryin> I guess.. don't know for sure tough
[08:46:03] <jthornton> archivist: I actually found a few six errors with grep
[08:46:26] <archivist> usb is not good for realtime control, trying to find out where you are going
[08:48:45] <archivist> we get one or few every now and again thinking a usb device will be suitable for machine control with linuxcnc, just try to stop wasted time up front before you get too far
[08:51:26] <DIYtryin> So the machine prints from left to right
[08:51:47] <DIYtryin> once it is done... the head needs to make a turn
[08:52:13] <DIYtryin> damn.. I don't even understand it myself
[08:52:20] <DIYtryin> and have no acces to the machine
[08:56:07] <DIYtryin> But the thing is.. My employer wants to have a button he can press in pyvcp, and then (via usb->python script on arduino->relay) the cncmachine gets ready for another row of fiber
[08:56:48] <DIYtryin> no difficult shapes involved
[08:56:53] <jthornton> does the machine have a parallel port?
[08:57:21] <archivist> just add a relay to the interface he has in it
[08:58:01] <DIYtryin> yes, but is already used for the out-of-the-box config of the machine. And he doesn't want to mess with it
[08:58:29] <DIYtryin> so the pc controlling the machine got the port I mean
[08:58:43] <archivist> then a breakout?
[08:58:49] <archivist> or mesa card
[08:59:25] <DIYtryin> is usb really tat bad?;)
[08:59:39] <archivist> I can envisage you wanting the rotate to be in the gcode later
[09:00:18] <archivist> usb has a very long negotiation phase (seconds)
[09:02:45] <DIYtryin> Yeah I can also imagine he wants to be able to rotate in gcode later. But for now he wants the setup I describe, and my deadline is the first of januari. So am a bit scared to loose myself in sidetracks
[09:03:38] <DIYtryin> and don't deliver in time
[09:09:25] <DIYtryin> So for the time being.. Any idea how I can run a python script on my arduino using linuxcnc?
[09:10:05] <archivist> no idea how to write to a usb device
[09:12:57] <DIYtryin> thanks anyway archivist
[09:15:30] <SpeedEvil> DIYtryin: don't use an arduino/
[09:17:11] <DIYtryin> Why not?
[09:18:37] <DIYtryin> I have to btw
[09:28:59] <JT-Shop> did you look at the link I gave you to the wiki?
[09:34:17] <SpeedEvil> Oh - I was assuming you were meaning a classic arduino
[09:34:19] <SpeedEvil> nv
[09:34:19] <SpeedEvil> m
[09:35:54] <DIYtryin> yeah I took a look. Don't understand how I can use this to control my arduino though.
[09:41:07] <JT-Shop> first see if the device shows up, if it does and you can connect with hal_input and the device has some pins then you can connect those in hal
[09:42:03] <JT-Shop> otherwise you can't use USB to communicate to the device, you would have to use an input on the device and trigger that input with a physical output.
[09:42:15] <JT-Shop> of course the input would have to be in your program
[09:42:46] <DIYtryin> brb.. I'll grab my arduino
[09:49:54] <DIYtryin> Jeuj! It sees my arduino!
[09:55:05] <DIYtryin> Now trying to let it show in my virtual box as well. Beofre i proceed
[10:08:50] * JT-Shop- tries to remember the logic used when storing the stud finder... the current logic is failing to find it
[10:09:13] <Tom_itx> you need a stud finder finder
[10:10:14] <Tom_itx> soggy day here
[10:17:12] <JT-Shop-> started raining last night and won't quit till monday I fear
[10:17:46] <Tom_itx> did you get your mill back up?
[10:21:44] <maxcnc> hi all from a nice day ending here in germany
[10:22:31] <maxcnc> irontree9: how has been the first miling over xmas
[10:22:41] <irontree9> I was soooooooo close!
[10:22:52] <maxcnc> 2
[10:23:32] <irontree9> Cutting out a hi res mesh model to about 0.1mm accuracy. But I screw up my tool paths again.
[10:23:39] <maxcnc> finish ,break the bit,start a part,...
[10:23:54] <irontree9> I need to use some boolean logic and inverse milling next time.
[10:24:15] <irontree9> During my second pass got hung up on a vertical
[10:24:21] <maxcnc> do you got a stl or step from the part or is it secret
[10:24:23] <irontree9> https://www.dropbox.com/s/ub6rnmf9egboy7g/2015-12-25%2019.13.40.jpg?dl=0
[10:25:04] <irontree9> Just a complicate stl for testing
[10:25:15] <maxcnc> heavy stuff for first atempt ;-)
[10:25:44] <maxcnc> 4x2.5 inches i guess
[10:26:11] <irontree9> Yeah about that
[10:26:17] <maxcnc> so tool size is 0.5mm ball to get best precision
[10:26:21] <JT-Shop-> Tom_itx I got Linuxcnc back running but the mill is down till tuesday and I get the fuses for the control transformer
[10:26:54] <irontree9> All I have left is a 1/8" ball that is dieing and a V
[10:27:20] <maxcnc> irontree9: did you rouph at 3mm ball tool to almost 0.2
[10:27:48] <maxcnc> V is not the best on 3D
[10:28:02] <maxcnc> 30deg i hope
[10:28:30] <maxcnc> with .3mm round end engraver
[10:28:39] <irontree9> How is the V angle measured from the shaft or the work?
[10:29:13] <maxcnc> some use the half some the full angel to sell
[10:29:56] <maxcnc> i got them from china in both ways they say there own mesurments
[10:30:04] <irontree9> I used a 3mm ball to ruff out with path distances wide to 2.5mm. then ruffed with the path distances at 1mm. Then I "WAS" going to try and skin it with the V but never got past the second pass
[10:30:17] <maxcnc> ok on the price of 10pics i never get one here
[10:30:56] <maxcnc> irontree9: use pathes with stand alone ngc
[10:31:07] <maxcnc> also home at every path
[10:31:32] <maxcnc> If your switches are precise
[10:31:49] <maxcnc> or get a point to zero at the tabel
[10:32:03] <maxcnc> best practice
[10:32:06] <irontree9> nothing fancy like switches
[10:32:43] <irontree9> I am setting up a mettle surface point for homing, home on wood is very difficult on wood :)
[10:32:52] <maxcnc> even low cost switches for 1USD got best performence
[10:33:21] <maxcnc> therefor i got a mounting plate with a zero point
[10:33:40] <maxcnc> and the part is ofsetet on cam
[10:34:20] <Erant> Are there any tricks for machining something on both sides and minimizing the error?
[10:34:46] <maxcnc> Erant: sharp edge
[10:35:10] <Erant> I have a part that needs some close tolerances, but if I have an 0.001" error measuring, then that results in a 0.002" misalignment...
[10:36:29] <maxcnc> on that you realy need a good cnc
[10:37:28] <maxcnc> irontree9: whats the name of that statue
[10:37:56] <Erant> It's more that when I flip the part over, I'm doubling any measuring error. I luckily have a way of fixing it later, but I'm just curious if there's a general trick for stuff like that.
[10:37:57] <SpeedEvil> Erant: what sort of part?
[10:38:28] <Erant> SpeedEvil: Re-doing my servo mounts with oldham couplings. They can only take like 0.008" misalignment.
[10:38:32] <SpeedEvil> make a reference surface on one portion of the part, and refer everything to that
[10:38:48] <irontree9> maxcnc, give me a sec
[10:39:03] <irontree9> want the stl?
[10:39:13] <maxcnc> if y<ou got it
[10:39:15] <Erant> SpeedEvil: Yeah, 's what I've been doing.
[10:39:32] <SpeedEvil> Erant: so you mean you want the 'tongue' to be not offset?
[10:39:41] <maxcnc> Erant: 90deg sharp edge that represents the xy
[10:40:43] <SpeedEvil> Erant: rotary table, set it up to cut one final pass, rotate part 180 degrees exactly
[10:40:52] <SpeedEvil> make same cut without changing anything
[10:40:58] <Erant> SpeedEvil: I make the hole for the shaft on one side of the part, and then the hole for the servo itself on the other side. If I'm off by a little in X making the hole for the shaft, I'm going to be off the same amount when I flip the part.
[10:41:04] <Erant> That... makes sense.
[10:41:19] <Erant> I've been meaning to get a rotary table anyway
[10:42:04] <maxcnc> at that precision your rotary is also a factor
[10:42:19] <SpeedEvil> or you could do it entirely the other way
[10:42:26] <maxcnc> and then you loose fixure force on miling
[10:42:43] <irontree9> maxcnc,
https://www.dropbox.com/s/hkefzngwkmmnskp/141201_Tohoku_Zunko-simple.stl?dl=0
[10:42:45] <SpeedEvil> start out with two parallel cuts , and then make a hole for the axis between them, and then seperate out
[10:42:57] <maxcnc> a fix point on mounting tabel is offen the best waxy
[10:42:58] <irontree9> The simple version
[10:42:59] <SpeedEvil> - making lots at once
[10:43:13] <maxcnc> Erant: so no touch off at all
[10:43:44] <Erant> Well, what I've been doing is just making the part, and then there's a plate that mounts on the back. I've been adjusting the plate based on the measured error of the main body.
[10:44:14] <Erant> Which is getting me to about 0.003" of misalignment. So it's all good, but I was curious if I was missing something.
[10:44:56] <maxcnc> then you do not have a clean fix point
[10:45:11] <Erant> I do, actually.
[10:46:52] <Erant> It's just, imagine being off by 1" on a 3" part (just, bear with me). So on one side you're going to be machining at X = 0.5", and then when you flip the part, you're now machining at X = 2.5" and your error is 2".
[10:47:57] <Erant> Because it's mirrored.
[10:56:36] <irontree9> 4
[10:56:39] <irontree9> opps
[10:56:44] <irontree9> wrong kb
[10:57:35] <JT-Shop-> well I did find my Kreg jig I was looking for a couple of months ago
[10:58:31] <maxcnc> irontree9: cool stuff
[10:59:32] <maxcnc> its realy hard for a beginning part but it coudt be a learning part
[11:00:04] <maxcnc> im off till later
[11:00:25] <irontree9> Learning how to make use the BlenderCAM simulator atm
[11:10:12] * JT-Shop found the other stud sensor... wonder if it works
[11:11:44] <enleth> is it in any way common to have drilled and reamed tapered holes in the worktable for vise or rotary table alignment? I can imagine several such holes, not too deep and plugged when not in use, to be somewhat useful for fast, repeatable attachment of accessories
[11:12:23] <Jymmm> alignment pins
[11:13:02] <SpeedEvil> yes
[11:13:12] <SpeedEvil> shafted bolts are also used
[11:13:23] <SpeedEvil> or whatever the proper term is
[11:13:41] <SpeedEvil> top part unthreaded and closely fitting in a socket threaded at the bottom
[11:14:14] <enleth> that's what I was thinking about
[11:14:25] <enleth> the top part could be tapered sligtly
[11:14:44] <SpeedEvil> dirt is a real issue
[11:14:47] <enleth> and the thread at the bottom of the hole could be used to mount plugs
[11:15:06] <SpeedEvil> Are you going to clean the hole, and wipe it out with acetone or whatever each time
[11:15:12] <SpeedEvil> or will swarf and grunge build up
[11:15:15] <Tom_itx> straight dowelpins are quite common
[11:15:18] <enleth> so that the holes would be plugged flush with the table when not in use
[11:15:19] <Tom_itx> tapered not so much
[11:15:45] <enleth> Tom_itx: I imagine a tapered pin would be easier to pull out?
[11:16:10] <SpeedEvil> Pins that tight in a table will have all sorts of issues
[11:17:59] <enleth> the way I see it, it would be a tapered hole bottomed out with a straight threaded part, but the thread would only be there to mount and remove a brass plug with a flat screwdriver slot on top
[11:19:10] <enleth> while a vise or whatever would carry through-holes to pass the pins through, with the actual alignment pins steel, with no threaded part at the bottom, ending just where the threaded hole portion starts
[11:19:10] <SpeedEvil> If you can keep it scrupulously clean, ...
[11:19:16] <SpeedEvil> also, torx might be better
[11:19:39] <enleth> and with a collar preventing them from going in too deep, resting against the top surface of the vise feet
[11:20:00] <SpeedEvil> I have made torx holes by hammering a torx bit into aluminium holes
[11:20:02] <enleth> that way, those pins would not be in any way holding the vise to the table, just setting it in position
[11:20:11] <SpeedEvil> there are probably better ways
[11:21:09] <SpeedEvil> I would wonder about leaving the bottom hole open
[11:21:52] <enleth> also, the pin may have a transverse hole in the portion sticking out above the vise foot to mount an eccentric cam puller
[11:22:19] <SpeedEvil> remember you're going to need to make maybe several hundred of these
[11:22:35] <archivist> tapers when fine jam hard
[11:22:56] <SpeedEvil> yeah
[11:23:34] <SpeedEvil> If you have shop-air, you want to design an air-cleanable hole
[11:24:59] <enleth> that could be done, there are oiling lines already in the saddle, there's ample room to fit air hoses to blow stuff out of them
[11:25:17] <enleth> them being the alignment holes of course
[11:25:20] <enleth> not oiling lines
[11:26:51] <enleth> how is that accomplished on the big expensive VMCs anyway?
[11:27:06] <enleth> I mean, fast mounting of vices and such
[11:27:38] <enleth> I can't imagine someone tapping the thin with a hammer and re-checking with an indicator every time
[11:27:42] <enleth> *thing
[11:30:44] <archivist> there are kinematic mounts for plates
[11:31:35] <SpeedEvil> yeah
[11:31:37] <SpeedEvil> step 0.
[11:31:41] <SpeedEvil> Understand kinematics.
[11:31:56] <SpeedEvil> Without a solid kinematic base, you wobble all over the place when designing mounts
[11:32:18] <archivist> but us cheapskates cannot afford
[11:43:06] <Loetmichel> *OUCHOUCHOUCH* Pizza delivery guy just ringed at the door.. so i jumped up and ran to the door... and hit the steel reiforced shelf with my kneecap in full run. CROUCHED to the door after that... ouch ouch ouch! $me slumps into the corner whimpering now :(
[11:44:01] <Jymmm> Loetmichel: Don't do that! It's JUST pizza =)
[11:44:45] <Loetmichel> the pizza was for my wife. i am not hungry. she is on crutches tho, so usually i take the door...
[11:45:23] <Jymmm> Loetmichel: Well, is she at least willing to let you borrow her crutches for your pizza war injury?
[11:46:27] <wicki> hi *
[11:46:52] <Loetmichel> luckily i have somewhat sturdy bones... its great tho when the pain eases away ;)
[11:53:35] <wicki> I just installed an rotary axis as A-axis - it works. but now I need a simple G-code for testing - and information about how to tell EMC2 where the A-axis ist installed and in which direction it points.... do you have any hints for me ?
[11:55:11] <wicki> it seems, the graphic-display is a little bit cunfused whe displaying the tool-path....
[11:56:24] <archivist> I just get used to the silly display
[11:57:05] <archivist> I often move the A axis about and its often mounted on B
[11:58:50] <enleth> archivist: like ground balls in vee-slots?
[12:01:21] <archivist> wicki, see GEOMETRY = XYZA in your ini adjusting the order of these may help
[12:01:56] <archivist> enleth, yes, one part being permanent, others being on plates
[12:02:12] <wicki> I will try this....
[12:03:07] <archivist> wicki, I break with standard conventions in that respect
[12:05:00] <archivist> enleth, one of my vices just had a bar so it aligned in the table slots
[12:07:04] <enleth> archivist: huh, that sure does make a lot of sense
[12:07:34] <enleth> archivist: do you consider this one to be more convenient to use in practice?
[12:07:50] <archivist> nah I removed it
[12:08:29] <enleth> was there a problem with it?
[12:09:06] <archivist> all depends on how you use yours, I just drop a rectangular bar in a slot and push the vice against it for square
[12:09:47] <archivist> this is one of those, no right answer for all occasions
[12:09:59] <enleth> sure
[12:10:24] <enleth> I'm buying a proper machinist's vise soon and I'm still not sure on how to mount it
[12:11:06] <enleth> I think I'll try mounting it to the side of the table to have the other side free for clamping things, thus avoiding taking the vise off as much as possible
[12:11:15] <wicki> oki - that looks better - thanks
[12:11:28] <enleth> unless, of course, I need to machine something that sticks out in both directions, where the vise must be centered on the table
[12:12:46] <archivist> I find I am moving stuff around almost every job
[12:13:08] <wicki> is it possible to set GEOMETRY=YXZA ?
[12:13:24] <enleth> well shit, maybe I'll just have to get used to moving the 80kg sucker on and off the table all the time
[12:13:25] <wicki> I'll try it.. ;-)
[12:13:37] <Jymmm> heat pump reversing valve
https://www.youtube.com/watch?v=8jr9d3KIfwY
[12:13:48] <SpeedEvil> Jymmm: so?
[12:14:26] <Jymmm> SpeedEvil: ?
[12:17:54] <wicki> no, thas does not work.... its the same result...
[12:18:53] <SpeedEvil> Jymmm: Oh - I thought it was another video, nvm
[12:19:27] <wicki> my A-axis is parallel to the x-axis. is it possile, tell this emc2?
[12:19:31] <Duc> morning all
[12:20:58] <wicki> or should I you only use other parameters for the g-code-ripper ? ?
[12:24:47] <archivist> g-code-ripper ?
[12:27:55] <Duc> lesson of the day. have limits installed before messnig with tuning of drives
[12:28:04] <Duc> finally got my table unjammed
[12:28:16] <wicki> yes. ihttp://www.scorchworks.com/Gcoderipper/gcoderipper.html
[12:28:25] <Duc> enleth: did the picture make sense last night
[12:28:29] <Loetmichel> Duc: rammed it into the mechanical block?
[12:28:45] <Duc> yea real bad
[12:28:56] <Duc> had to take a chain wrench to the unused section of the ball screw
[12:28:59] <DIYtryin> archivist, I forgot to help you for your help earlier today. I'm back and finaly figured out how to get my yun recognised by linuxcnc on my virtual box (that and I ate a delicious pizza)
[12:29:12] <irontree9> All i got are soft limits
[12:29:47] <Jymmm> SpeedEvil: It is a video, cross-cut of an HVAC heat pump reversing valve. Not like we see that all the time or anything =)
[12:30:00] <archivist> Duc, lower the current until you are sure its close
[12:30:37] <SpeedEvil> Jymmm: yes, I thoght it was a boring schematic one
[12:30:43] * SpeedEvil isn't awake
[12:30:44] <Duc> archivist: had a question relating to the setup. Is there a section in linuxcnc where you select velocity or torque drive mode
[12:30:55] <Jymmm> SpeedEvil: Oh, heh. Got Coffee?
[12:31:27] <Duc> archivist: the drives were moving alot faster then my jog speed
[12:32:13] <archivist> duc I am not a the best person for servo tuning (dont have any servos yet)
[12:32:16] <Jymmm> SpeedEvil: It was 26F this morning and the heater (heat pump) was running for like 40m non stop.
[12:33:15] <pcw_home> velocity ot torque mode are characteristics of your servo drive, not a linuxcnc option
[12:33:54] <Duc> pcw_hom: ok seems the drives were moving about 100 ipm not the 16 ipm I had set
[12:34:23] <wicki> wow! that sounds and looks good ;-)
[12:34:30] <wicki> thx archivist
[12:35:29] <Loetmichel> Jymmm: get a plastic/ wood hammer and pund that valve unitl it works ;)
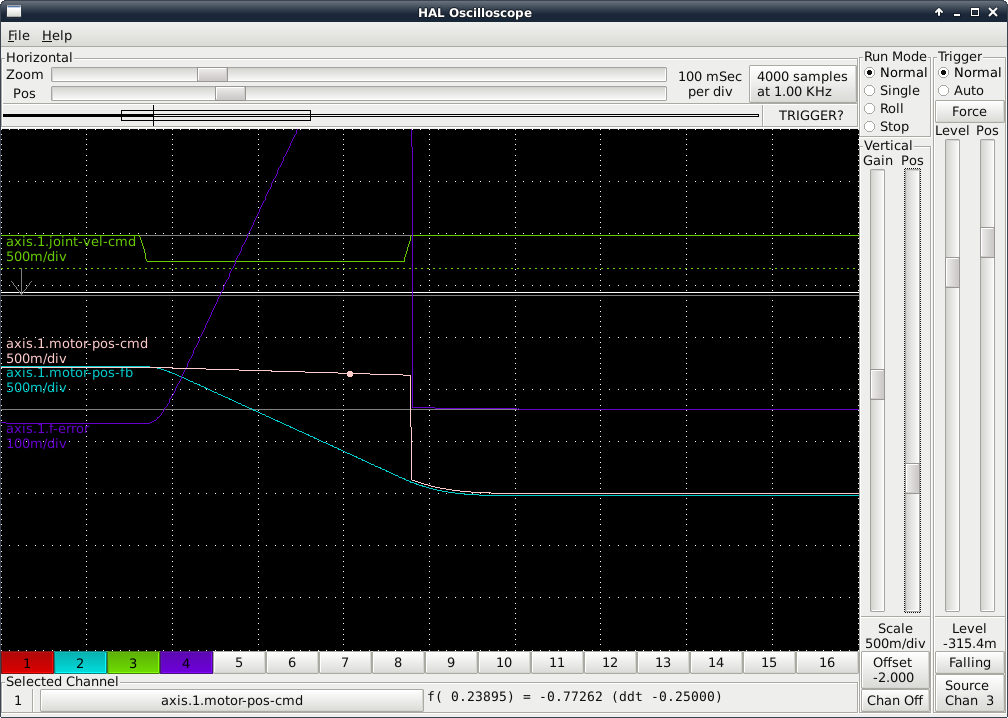
[12:36:05] <Duc> pcw_home: here is the f-error I was trying to correct with the FF1 setting
http://i1221.photobucket.com/albums/dd465/shefron/Machinery/Boss5%20servo/0bd001a5-858c-49e1-b45f-673618d0a025_zpslepyvzu8.png
[12:36:21] <Jymmm> Loetmichel: Oh it's working (thank goodness), just the system is going into defrost mode frequently and I was curious about how it reverses the flow is all.
[12:37:23] <Loetmichel> Jymmm: i contemplated if it wouldnt be easier to use a gear pump as the compressor and simply reverse it...
[12:37:35] <Loetmichel> instead of such a complicated valve
[12:37:52] <Loetmichel> dont know the correct word for it
[12:37:58] <Jymmm> Loetmichel: Can you reverse both sides at the same time?
[12:38:17] <Loetmichel> the pumps that are like the roots chargers in cars
[12:38:26] <Loetmichel> you dont have to
[12:38:46] <Jymmm> Loetmichel: no clue what that is, but what do you mena "you dont have to" ?
[12:38:56] <Loetmichel> it should work if you simply reverse the flow thru the compressor, or am i making a thinking error there?
[12:39:36] <Jymmm> Loetmichel: There's a high and low side, then the condenser and evaporator. you need to reverse BOTH
[12:40:01] <Loetmichel> which you DO if you reverse the pump, dont you?
[12:40:13] <Jymmm> Loetmichel: It's not a "single loop" system, but a dual loop.
[12:40:47] <Jymmm> Loetmichel: Maybe watching that video (link above) might explain it better than I.
[12:40:56] <Loetmichel> yeah, i did
[12:41:02] <Jymmm> Loetmichel: or this
https://www.youtube.com/watch?v=14MmsNPtn6U
[12:41:14] <Loetmichel> but the condensor and the evatorator are in series arent they?
[12:41:21] <SpeedEvil> Loetmichel: scroll pumps can't be reversed
[12:41:29] <Loetmichel> with a capillary in between
[12:41:30] <SpeedEvil> Loetmichel: gear pumps don't really work well AIUI for that
[12:41:52] <Loetmichel> SpeedEvil: was just a thought
[12:42:03] <Loetmichel> because gear pumps can be reversed
[12:42:07] <SpeedEvil> Well - it will 'work'
[12:42:13] <SpeedEvil> But you actualy want decent efficiency
[12:44:06] <Loetmichel> Jymmm: i know how these "3/2 way" valves work
[12:44:37] <Loetmichel> i jut meant that the AC gas circuit should be able to run in reverse with no ill effects at all
[12:44:48] <Loetmichel> so the valve is not needed if you can reverse the compressor
[12:44:55] <Loetmichel> may be i am wrong there
[12:46:22] <SpeedEvil> The valve is precisely to reverse the compressor
[12:47:27] <Loetmichel> SpeedEvil: thats what i meant: if you have a compressor type that can be reversed by reversing the drive direction you can eliminate the complicated valve
[12:47:48] <pcw_home> Duc: pretty weird, how can you have a step in the position command?
[12:48:18] <Loetmichel> SpeedEvil: so reversing the MOTOR attached to the compressor is sufficient
[12:48:56] <Loetmichel> with involves MUCH less wear-prone mechanincs and only a switch in the ideal case
[12:49:03] <Loetmichel> that was where i was going with that
[12:49:14] <Duc> pcw_home: Not really sure that step showed up after I started tuning the FF1
[12:49:32] <Duc> pcw_home: before it just sloped very slowly
[12:49:34] <Loetmichel> i am aware that a gear pump may be not ideal to compress refridgerant gas ;)
[12:50:16] <Duc> pcw_home: The movement seemed to lag behind when I hit the arrow key. Computer is a P4
[12:56:11] <pcw_home> FF1should not be able to affect the commanded position, that should be straight from the trajectory planner
[12:56:45] <pcw_home> so something is quite fishy here
[12:57:20] <Duc> pcw_home: I used pnnconf to setup the initial config file in
[12:57:30] <Duc> 2.7.3
[12:58:20] <pcw_home> did you change something in halscope mid plot?
[12:58:38] <Duc> nope
[12:59:52] <pcw_home> the joint velocity command and position command do not match so something is broken in a major way
[13:00:22] <Duc> there is another weird problem that showed up last night when I crashed the mill. after reversing then hitting a joint 1 following error axis will move again by itself once I power the drives back up
[13:00:36] <Duc> till I relaunch linuxcnc
[13:01:30] <pcw_home> That means you dont have the drive enables working
[13:01:40] <Duc> but I think that was related to putting a value in FF0 since it just stopped once I cleared the value
[13:04:02] <Duc> pcw_home: still seeing the step even with the motor removed from table
[13:04:52] <pcw_home> the commanded position is independent of the motor and interface
[13:05:13] <Duc> yea I can post my ini and hal file if that helps
[13:05:26] <pcw_home> so something is broken upstream (unrelated to drives, interface, feedback PID etc)
[13:05:58] <Duc> can it be computer related but this was the computer I used with the stepper setup
[13:07:42] <pcw_home> Ahh maybe the step is when you got a following error
[13:08:03] <Duc> over correct?
[13:09:11] <pcw_home> no if you get a following error the commanded position is set to the feedback position (and the drives are disabled)
[13:09:11] <Jymmm> Loetmichel: Think of a DPDT swicth to reverse polarity. it's not just reversing one wire, but two.
[13:09:34] <Jymmm> Loetmichel: Well, two loops
[13:09:52] <Loetmichel> Jymmm: i know
[13:10:29] <Duc> any ideas of what could be wrong. even at very slow speeds the pos-cmd lags bad
[13:11:35] <pcw_home> Yes, its not tuned :-)
[13:12:07] <Duc> LOL well yea
[13:12:24] <pcw_home> Did you set P as high as possible first? (bump up slowly till it oscillates and the back off about 30%)
[13:12:40] <maxcnc> hi all ;-)
[13:12:56] <maxcnc> irontree9: ?
[13:13:32] <maxcnc> http://heimwerkermarkt-tretter.de/engel.jpg
[13:13:37] <Duc> pcw_home: what would you consider high at 400 right now
[13:13:50] <maxcnc> i modified it a bit to get more details at the plainside
[13:14:02] <Duc> I just put it there from 0 earlier
[13:14:18] <pcw_home> well you should be able to set FF1 so it leads or lags
[13:14:50] <pcw_home> how fast does the machine move at 10V?
[13:15:45] <Duc> not really sure how would I check that
[13:15:53] <pcw_home> (you can estimate FF1 from this)
[13:15:55] <Duc> I know the drives go to 5000 rmp
[13:15:58] <Duc> rpm
[13:16:34] <Duc> 1:1 belt with a 5:1 ball screw I believe
[13:17:12] <pcw_home> is that original (seems very fast)
[13:17:27] <Duc> let me check real quick
[13:18:24] <pcw_home> 5K RPM is normally not safe with ballscrews due to whipping
[13:19:11] <Duc> 5 turns for a inch
[13:20:05] <pcw_home> 1-1 5K RPM to 0.2"t ballscrews is ~900 IPM
[13:20:15] <Duc> yea way faster then what I need
[13:20:16] <maxcnc> Duc: 3K at belt 3:1 with 5:1 gives you 200ipm
[13:20:40] <Duc> max 150 ipm is needed
[13:20:53] <maxcnc> good to go for this
[13:21:40] <maxcnc> the drive may have a rs232 to set some parameters
[13:21:59] <Duc> I need to find the adjustment in sigmawin to adjust scale
[13:23:04] <maxcnc> you may can use the yaskawa setup tool
[13:23:31] <Duc> thats what Im using now
[13:23:40] <Duc> Just need to find the correct parameter
[13:25:14] <Duc> so I need to limit the drive to around 750 RPM
[13:26:01] <maxcnc> up to you
[13:28:10] <Duc> I think its the speed reference input gain
[13:29:29] <pcw_home> better to change the pulleys so you get say 200 IPM at 5000 RPM
[13:29:49] <Duc> tried in the past. I cant get a different size pulley in there
[13:30:15] <irontree9> maxcnc, yeah I am here
[13:30:21] <maxcnc> servo adapter gear at 50US
[13:30:30] <pcw_home> If you limit the drive RPM to 750, you are only using 750/5000 of the capabilities of the drives/motors
[13:30:34] <maxcnc> irontree9:
http://heimwerkermarkt-tretter.de/engel.jpg
[13:31:50] <irontree9> okay you got to tell me how you did that maxcnc
[13:32:11] <Duc> the axis on the boss5 will not allow a bigger gear on the ball screw sided even bought the gears already
[13:32:16] <maxcnc> Blender to modify
[13:33:10] <maxcnc> irontree9: nees down hair up
[13:33:28] <maxcnc> i will upload the model and the gcode
[13:33:37] <pcw_home> Its not great though because if you have 1 KW 5K RPM drives limited to 750 RPM you are only getting 150W
[13:34:14] <Duc> I thought most servo maintain power thru out the band?
[13:34:19] <irontree9> radical
[13:35:31] <irontree9> are you using BlenderCAM or just blender
[13:35:36] <maxcnc> http://heimwerkermarkt-tretter.de/engel.zip
[13:35:54] <maxcnc> blender the sim is on freemill visualmill
[13:36:17] <maxcnc> the gcode is haas but linuxcnc can read it
[13:38:08] <maxcnc> there is a 3mm rouph and a 1mm fiish inside
[13:38:18] <maxcnc> all Ball cutters
[13:38:27] <irontree9> Yeah I see those
[13:39:05] <maxcnc> freemill works great on this stl
[13:39:36] <maxcnc> i also reduced the verticts to 25000
[13:39:51] <maxcnc> for faster nccode genration
[13:39:57] <irontree9> Yeah it was ten time bgger than the one I sent you
[13:40:00] <Duc> pcw_home: might be easier to get a gear reduction head for the drives
[13:40:20] <maxcnc> Duc: yes
[13:40:27] <pcw_home> Servos do maintain torque much better than step motors through their RPM range
[13:40:29] <pcw_home> but a servo rated 1KW at 5000 RPM will only output about 150W at 750 RPM
[13:40:30] <pcw_home> (that is you dont get 6x more torque by running 6X slower, the continuous torque limit is a thermal limit)
[13:40:37] <irontree9> This looks great, thanks maxcnc
[13:40:44] <maxcnc> NP
[13:40:54] <maxcnc> Duc: 25:1
[13:42:45] <Duc> maxcnc: wonder what I can find on ebay
[13:44:18] <maxcnc> i think you may need 5 as you got 5:1 alredy on ballscrew
[13:45:49] <Duc> Ill see what I can find
[13:47:28] <Duc> outside of the gear reduction I'm still getting massive f-error. I have the P at 11,750 and 20
[13:48:00] <maxcnc> Gn8
[14:10:12] <pcw_home> well not necessarily safe (since unsupported ballscrews at 5000 RPM may fly across the room)
[14:10:13] <pcw_home> but if 10V = 900 IPM FF1 needs to be around 0.66 (15 IPS * .66 = 10)
[14:10:43] <Jymmm> How a ground source heat pump works (very informative), I like that there is no fans...
https://www.youtube.com/watch?v=kRQuKyQAbtM
[14:12:59] <Duc> pcw_home: where did the 15 IPS come from in calc. For now I will limit the drive to around 750 RPM while I research a gear reducer or rebuild the motor mounts
[14:14:32] <pcw_home> 5000 rpm * 0.200"/turn = 1000 IPM (10% less for headroom = 900 IPM = 15 IPS)
[14:15:41] <pcw_home> all PID numbers are in machine units or machine units/S or machine units/S^2
[14:16:44] <pcw_home> so to get a feed forward voltage of 10V at 900 IPM you need FF1 * machine velocity in IPS = 10
[14:17:28] <Duc> oh ok so much info Any place where alot of this is placed so I dont have to bug you so much
[14:17:53] <pcw_home> the other way to do this is scale the PID in machine units (then FF1 == 1)
[14:20:40] <Duc> so I can limit the drives to a 1000 RPM according to parameters so I would have 3.33 IPS * 3.03 = 10
[14:20:55] <Duc> max IPM of 200ipm
[14:21:00] <pcw_home> The way you scale the PID in machine units is to set the analog output scale to IPS (or mm/S for metric machines) at 10V to the drive
[14:21:02] <pcw_home> This has the advantage the the PID values now stay the same for inche an metric machines
[14:21:39] <pcw_home> if you limit the drive to 1000 RPM does that make them runs at 1000 RPM at 10V (or at 2V)?
[14:22:28] <Duc> at 10v
[14:22:44] <Duc> according to the calculator wizard in the softwware
[14:25:36] <Duc> changing the FF1 to 3.03 and changing the RPM limit has removed the f-error and pos-cmd and pos-fb follow pretty well
[14:27:30] <pcw_home> Servos are very often geared down when driving ballscrews
[14:27:32] <pcw_home> (this is because getting more power from the motor by spinning faster is basically free)
[14:28:19] <Duc> I wish it was easy to gear this sucker down but the older bosses are a bear
[14:29:28] <pcw_home> purpose built direct drive servos like Fanuc are often 8 pole and 1700 RPM
[14:30:02] <Duc> part of this project was to learn more about servos for building one off fixtures for the gun industry
[14:31:54] <Duc> I hate not knowing stuff but some of the info is difficult to find unless you already know it
[14:38:31] <Duc> question on the max_linear_velocity how does the value correspond to speeds. with a 1 = 60 ipm and 2= 120 ipm but its a odd colleration. any insight into this
[14:39:54] <pcw_home> pretty much all hal velocity values are machine units per second
[14:41:06] <Duc> makes alot more sense now
[14:41:22] <pcw_home> note that if you have 10V = 300 IPM (5 IPS) you would need to set LinuxCNCs maximum velocity somewhat lower
[14:42:18] <Duc> yea I need to find where my output is being limited to 3v on output to drives
[14:42:27] <zeeshan-mobile> hu
[14:42:29] <zeeshan-mobile> hi
[14:42:47] <pcw_home> (you never want to saturate your PID output so you need 10-20% headroom so conservatively 4 IPS LinuxCNC limit)
[14:43:06] <Duc> so I was going to leave it at 3 for max velocity 180 IPM max
[14:43:38] <Duc> any reason why the INI file has 3 different max velocity lines. Axis, then all 3 axis and then the individual limits
[14:44:14] <Duc> actually I should limit it to 160 IPM for the 20% head room
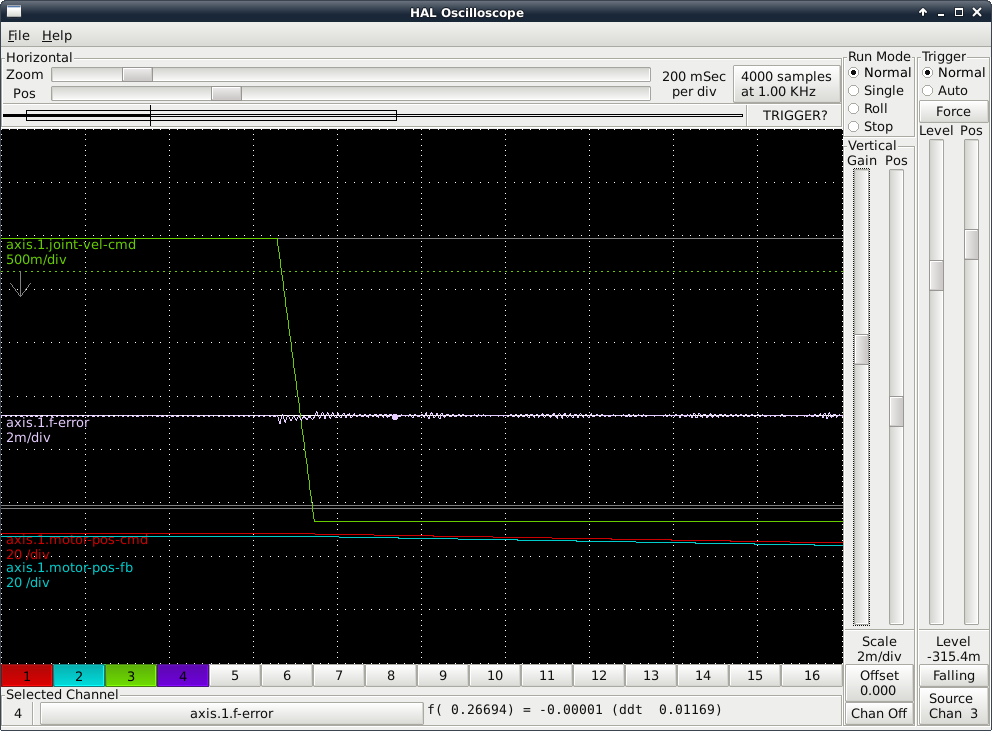
[14:50:36] <Duc> uploading a new tuning chart now
[14:51:22] <Duc> http://i1221.photobucket.com/albums/dd465/shefron/Machinery/Boss5%20servo/Y-axis%20159%20IPM_zpsnm1es1je.png
[14:51:25] <Duc> Much better
[14:51:35] <Duc> this is off the mill still but at least the error is gone
[14:54:36] <XXCoder> hey zeeshan-mobile
[15:02:41] <Duc> and silence
[15:04:09] <XXCoder> connection issues it seem
[15:05:01] <Duc> probably
[15:05:11] <Duc> mine has been stable on day which is a miracle
[15:14:23] <XXCoder> cool
[15:18:45] <Duc> I probably shouldnt have stayed on past the machine crash last night was somewhat of a ass to pink vampire
[15:29:47] <os1r1s> Duc With your assault on her mail choices?
[15:29:48] <os1r1s> nail
[15:32:38] <Duc> yea
[15:33:03] <os1r1s> Duc I'm sure many were thinking the same thing
[15:33:05] <malcom2073> Lol holy hell
[15:33:09] <Duc> thought it was a male for some reason. stress level was pegged since I thought I destroyed my ballscrew
[15:33:13] <malcom2073> I scrolled back, that was quite an impressive bit of trolling
[15:38:28] <Duc> I can only imagine if I drank any
[15:44:08] <os1r1s> Fucking lightning hit my DSL line and smoked my router, one modem, a managed switch, and a wap.
[15:44:39] <Duc> ouch
[15:44:59] <os1r1s> Duc
https://www.dropbox.com/s/hdp9a1ni62p9tb2/apu2.jpg
[15:45:10] <os1r1s> Look at the ethernet chips ...
[15:47:21] <Duc> at least it let the smoke out quick
[15:47:50] <os1r1s> Yeah. Simulataneously from all over hte damn place
[15:50:53] <XXCoder> heh I remember when network card failed and took basically everything with it
[15:51:01] <zeeshan-mobile> http://m.imgur.com/TJeBVVL
[15:51:10] <zeeshan-mobile> Fak you subaru
[15:51:11] <XXCoder> leaving me with only working ram sticks and umm tower itself
[15:51:23] <zeeshan-mobile> blew the engine 700 miles from home
[15:51:32] <zeeshan-mobile> getting it towed back
[15:51:45] <XXCoder> 700 mile tow? ouch isnt that expensive
[15:51:57] <malcom2073> Ouch, this is why you buy a car trailer :P
[15:52:14] <zeeshan-mobile> yes$3500
[15:52:23] <malcom2073> Nah, I paid $1400 for mine, and mine is really nice
[15:52:37] <malcom2073> So how much is a 700 mile tow costing you? :P
[15:52:43] <zeeshan-mobile> ^^^
[15:52:46] <Duc> I might have lit the engine on fire to just kill it off
[15:52:49] <malcom2073> Ohhh
[15:52:53] <malcom2073> yeah you could buy a nice car trailer for that
[15:52:58] <malcom2073> + probably a beater truck for towing
[15:52:59] <zeeshan-mobile> it blew a ringland
[15:53:11] <zeeshan-mobile> everything is closed
[15:53:15] <Duc> boosted?
[15:53:22] <zeeshan-mobile> and i was 200 miles from civilization
[15:53:28] <zeeshan-mobile> yes
[15:53:31] <zeeshan-mobile> stock
[15:53:37] <zeeshan-mobile> 25000 miles on car
[15:53:56] <zeeshan-mobile> i am pretty sure i got a bad gas batch
[15:54:23] <zeeshan-mobile> will take it apart wheni get home and see wtf happened
[15:54:32] <Duc> dont you still have warranty?
[15:54:34] <zeeshan-mobile> lesson: rent a car for long drives
[15:54:36] <zeeshan-mobile> no
[15:54:53] <zeeshan-mobile> its a 2010, warranty is only 3 yrs
[15:55:38] <malcom2073> Lesson: Don't buy a car from zeeshan, he beats them up? :P
[15:55:43] <zeeshan-mobile> lol
[15:56:25] <zeeshan-mobile> best part, it lasted more than a rotary!
[15:56:45] <malcom2073> Apparently not long heh
[15:56:52] <zeeshan-mobile> >:(
[15:56:56] <malcom2073> Oh boosted
[15:56:56] <malcom2073> yeah
[15:57:06] <malcom2073> Boosted cars == no longevity unless you drive them like they're not boosted :P
[15:57:09] <Duc> are you on winter break from school or out of it
[15:57:30] <zeeshan-mobile> school?!?
[15:57:36] <zeeshan-mobile> thats part time
[15:58:13] <zeeshan-mobile> i was supposed to come back jan1, it sucks
[15:58:25] <Duc> LOL and thats when this shit happens
[15:58:30] <zeeshan-mobile> i was staring at the mountain i was going to climb
[15:58:52] <Duc> I failed calc 2 due to head swap on a dodge stealth right when I should have been studying
[15:59:00] <zeeshan-mobile> lol
[15:59:11] <zeeshan-mobile> school first!
[15:59:27] <Duc> on car and I was 1800 miles away from my parents house
[15:59:30] <Duc> only
[15:59:38] <zeeshan-mobile> jeez
[16:00:26] <Duc> Im long done with a engineering degree that was 6 years ago
[16:00:49] <zeeshan-mobile> nice
[16:01:00] <zeeshan-mobile> which discipline
[16:01:05] <Duc> Mechanical
[16:01:10] <zeeshan-mobile> same here
[16:01:14] <Duc> how far along are you
[16:01:17] <zeeshan-mobile> trying to finish masters now
[16:01:46] <zeeshan-mobile> i finished undegrad in 2013
[16:02:21] <zeeshan-mobile> I hope damage in minimal
[16:02:22] <Duc> yuck I spent way to much time in college. I have a Assc in Flight simulator maintenace and decided to have Lockheed pay for my bachelors
[16:02:39] <zeeshan-mobile> wow dude
[16:02:42] <Duc> think in total I have 220 credits
[16:02:51] <Duc> fuckers not taking my Assc credits
[16:02:58] <zeeshan-mobile> we have a similar past
[16:03:17] <zeeshan-mobile> i did 3 years tech college before the 4 year undergrad
[16:03:26] <zeeshan-mobile> lots of hands on learning
[16:03:51] <Duc> advisor in ME didnt believe I would ever finish the program since I was part time. I made sure to walk and shake his hand. He said congrats I never believed you would make it but you did.
[16:03:59] <zeeshan-mobile> you work at lockheed?
[16:04:36] <zeeshan-mobile> nice man, a ME degree isnt easy
[16:04:49] <zeeshan-mobile> especially if youre trying to get aS
[16:04:55] <zeeshan-mobile> A's
[16:05:06] <Duc> Did, at Kirtland AFB for the CV22, C130, 60 helicopter sims
[16:05:21] <zeeshan-mobile> nice! thats very cool
[16:05:26] <Duc> C or better for me
[16:05:44] <Duc> I was working 50+ hours a week and sleeping in my truck or wooden benches
[16:06:01] <Duc> still had to do graves, swings and day shifts
[16:06:03] <zeeshan-mobile> tough
[16:06:19] <zeeshan-mobile> worth it in the end.
[16:06:46] <Duc> yes it was. one day my pay will be back to that level I made alot as a sim tech
[16:06:50] <zeeshan-mobile> 58% ppl drop put of eng
[16:06:54] <zeeshan-mobile> first year
[16:07:27] <Duc> I saw alot of that. and dynamics
[16:08:01] <zeeshan-mobile> for me its not the money
[16:08:13] <zeeshan-mobile> if i did it for the money id be a stripper
[16:08:17] <zeeshan-mobile> :)
[16:08:27] <zeeshan-mobile> the ladies would like it
[16:08:36] <Duc> I did it for the freedom and being able to get more jobs
[16:08:52] <zeeshan-mobile> i always wanted to design life critical things
[16:09:03] <zeeshan-mobile> and i am on my way doing that
[16:09:27] <zeeshan-mobile> yes, it definitely opens a lot of doors
[16:09:32] <Duc> what is your area?
[16:10:02] <zeeshan-mobile> im currently doing electrical power distribution but soon will be doing material handling
[16:10:08] <zeeshan-mobile> cranes and stuff
[16:10:36] <zeeshan-mobile> even for power dist, i have been working on lifting bravkets, frames etc
[16:10:47] <zeeshan-mobile> 550lb breakers!!
[16:11:11] <Duc> the ones with a crank up spring first before it will close?
[16:11:27] <zeeshan-mobile> yes
[16:11:39] <zeeshan-mobile> but most of these have a motor to do tgat
[16:12:00] <zeeshan-mobile> cause a lot if ppl like remote operation. due to arc flash
[16:12:08] <Duc> I only wish I remembered 40 percent of the stuff from ME
[16:12:16] <zeeshan-mobile> you will
[16:12:29] <zeeshan-mobile> just need to be asked the right stuff
[16:12:35] <zeeshan-mobile> youll know where to look
[16:12:55] <zeeshan-mobile> i havent done stripping torque calcs
[16:13:03] <zeeshan-mobile> just did that on Tuesday
[16:13:18] <zeeshan-mobile> shigleys saved my butt :)
[16:13:29] <Duc> 7 years of schooling for the ME and some of the time I was a zombie in those classes
[16:13:38] <zeeshan-mobile> lol
[16:13:43] <Jymmm> How to test the capacity of an alkaline battery...
https://www.youtube.com/watch?v=Y_m6p99l6ME
[16:14:04] <zeeshan-mobile> oh noes i see what jymm is tryping
[16:14:09] <zeeshan-mobile> :)
[16:14:28] <Jymmm> zeeshan-mobile: /ignore Jymmm
[16:15:13] <Duc> lol Ive been wondering about that Jymmm but now days with the viral videos the trust is missing
[16:15:46] <Jymmm> Duc: eevblog test
https://www.youtube.com/watch?v=PRf9JTg3QwA
[16:16:36] <Duc> Ill just use a meter more reliable
[16:28:24] <Tom_itx> whassup zeeshan-mobile!
[16:28:53] * zeeshan-mobile read above thomas :)
[16:29:02] <Deejay> gn8
[16:29:27] <Tom_itx> short vacation?
[16:29:53] <Tom_itx> so much for wingin it
[16:30:07] <zeeshan-mobile> lol
[16:30:18] <zeeshan-mobile> a blown engine will do that
[16:30:29] <zeeshan-mobile> man i was so impressed woth the car
[16:30:47] <zeeshan-mobile> i climbed a few steep mountains the day before
[16:30:49] <Tom_itx> what you gonna do now?
[16:31:03] <zeeshan-mobile> on tow truck right now
[16:31:17] <Tom_itx> headed for the river?
[16:31:18] <zeeshan-mobile> trying to kill 8 hrs
[16:31:22] <Tom_itx> to dump it off
[16:31:22] <zeeshan-mobile> hahaha
[16:32:04] <Duc> just remember student loans have to be paid back after engine repairs LOL
[16:33:34] <Tom_itx> zeeshan-mobile, one year the weekend we returned from a cruise, the ship was quaranteened for the next one out
[16:33:40] <Tom_itx> just missed that one
[16:33:56] <zeeshan-mobile> lucky!
[16:33:56] <Tom_itx> all those ppl stuck at the port
[16:34:21] <zeeshan-mobile> lol duc
[16:34:47] <Duc> watched many students spend all the extra money from the loans on stuff
[16:35:00] <zeeshan-mobile> whered you go tom
[16:35:02] <Duc> 6,000 on a bike, 2,000 on tvs
[16:35:03] <zeeshan-mobile> for a cruise
[16:35:11] <zeeshan-mobile> duc thats silly!
[16:35:22] <zeeshan-mobile> i only racked up 25k
[16:35:32] <zeeshan-mobile> but its mostly paid off
[16:35:33] <Duc> thats not bad really
[16:35:36] <Tom_itx> i don't remember now, that was a couple years back
[16:35:44] <zeeshan-mobile> i have friends that owe 85!
[16:35:49] <Duc> I just made the final payment to clear my student loans out
[16:35:56] <zeeshan-mobile> niceee
[16:35:59] <zeeshan-mobile> freedom
[16:36:00] <XXCoder> still working on my college loans
[16:36:03] <Duc> yea most of mine finished with 50-65K
[16:36:04] <XXCoder> anytime soon :(
[16:36:08] <XXCoder> *not
[16:36:36] <Tom_itx> time to enroll for post grad stuff now...
[16:36:39] <Duc> XXCoder but are you at least using yours and avoid liberal arts
[16:36:51] <XXCoder> Duc: assuming a little there
[16:36:58] <Duc> lol
[16:37:02] <XXCoder> I have IT and CS degrees and are a machinist
[16:37:27] <Tom_itx> so a machinist with paper
[16:37:29] <Duc> nothing wrong with being a machinist I almost wish I went that way
[16:37:41] <Duc> and you can be a manufacturing engineer later on
[16:38:02] <XXCoder> actually cnc machinist not manual
[16:38:04] <Tom_itx> that's what i enrolled in
[16:39:26] <Duc> I might have a issue with people that are suprised after college that a art degree will only get them 15/hr and they have 65k in debt
[16:39:59] <XXCoder> just diappointed that cs degree was useless
[16:40:01] <zeeshan-mobile> :)
[16:40:17] <zeeshan-mobile> Dont tell them! we need cheap labor
[16:40:44] <Tom_itx> they'll flip burgers instead
[16:41:00] <XXCoder> been "flipping burgers" way too damn many years
[16:41:18] <XXCoder> I almost rather live at street than "flip burger" again
[16:41:36] <Duc> do you understand macros and g-code better
[16:41:39] <Duc> ?
[16:41:50] <XXCoder> its very simple script language to me
[16:42:12] <XXCoder> I grasp ideas much faster, but forget pretty quickly (my memory sucks)
[16:42:32] <zeeshan-mobile> reward yourself with nudes
[16:42:33] <XXCoder> its machinist concepts thats bit harder, like figuring right speeds and such for good cuts
[16:42:39] <zeeshan-mobile> to rember stuff
[16:42:45] <zeeshan-mobile> :)
[16:42:55] <XXCoder> lol
[16:43:05] <Tom_itx> i heard that makes ya go blind
[16:43:06] <XXCoder> till I get blind and I cant read anything anymore ;)
[16:43:17] <XXCoder> and hairy palm lol
[16:43:21] <XXCoder> funny myths
[16:43:22] <zeeshan-mobile> lol
[16:43:32] <XXCoder> hairy palms = hard to type
[16:43:44] <zeeshan-mobile> i always tried to apply what i was learning
[16:43:45] <Duc> I would have been blind years ago
[16:43:49] <zeeshan-mobile> or i firget too
[16:44:22] <XXCoder> Duc: and palms to do dwarves proud eh ;)
[16:46:34] <Duc> yes
[16:47:01] <Duc> but I would seriously apply for manufacturing engineer if you have a 4 year degree
[16:47:23] <Tom_itx> so zeeshan-mobile, how'd the motor blow?
[16:47:30] <Tom_itx> you throw a rod or what?
[16:48:09] <XXCoder> lots jobs out there?
[16:48:21] <XXCoder> being deaf makes it MUCH harder to get jobs
[16:48:30] <XXCoder> even "burger flipping" level ones
[16:48:59] <XXCoder> in least, when has no network
[16:49:01] <Duc> I forgot about that. but that shouldnt matter once you know how to calculate tool live, chip color and spindle load
[16:49:18] <zeeshan-mobile> tom. i think detonation
[16:49:36] <zeeshan-mobile> it didnt sound like rod knock
[16:49:37] <Tom_itx> head gasket?
[16:49:41] <zeeshan-mobile> no
[16:49:53] <zeeshan-mobile> piston ringland
[16:50:02] <zeeshan-mobile> is my prediction
[16:50:04] <Tom_itx> huh
[16:50:33] <zeeshan-mobile> it started with a quiet clunk that you could only hear on decel
[16:50:54] * zeeshan-mobile pulled over, checked oil, it was ok
[16:51:08] * zeeshan-mobile took off oil cap, could feel massive blowby
[16:51:30] <zeeshan-mobile> then drove a bit more, clunk got louder ok decel
[16:51:33] <XXCoder> so whats your plan with car
[16:51:35] <zeeshan-mobile> On
[16:51:43] <zeeshan-mobile> and kaboom
[16:51:52] <zeeshan-mobile> oil smoke, power loss
[16:51:56] <XXCoder> Duc: yeah. though right now I just want to keep working and gaining skills on cnc machinist
[16:52:01] <XXCoder> maybe evenually boeing
[16:52:05] <zeeshan-mobile> ill rebuild engine
[16:52:12] <zeeshan-mobile> should take a week
[16:52:20] <Duc> how long have you been a CNC machinist XXCoder
[16:52:22] <XXCoder> cool
[16:52:36] <Tom_itx> you'll need to clean out all the metal good
[16:52:36] <XXCoder> well including internship year and hal
[16:52:50] <XXCoder> solvent dips would do that Tom_itx
[16:52:57] <XXCoder> and good elbow grease
[16:53:04] <Tom_itx> i know, i've done dozens
[16:53:21] <XXCoder> cool :)
[16:53:33] <XXCoder> just wish I could solve bad idle problem on my van
[16:53:53] <JT-Shop> yea found a couple of type CC fuses for my control transformer
[16:54:12] <Tom_itx> cool, give you something to do in the rain
[16:54:17] <Tom_itx> been raining all day here
[16:54:24] <Tom_itx> gonna turn to ice later i bet
[16:54:26] <zeeshan-mobile> http://m.imgur.com/TJeBVVL
[16:54:31] <zeeshan-mobile> for you tom lol
[16:54:32] <XXCoder> Tom_itx: basically its battery is fine (tested 12.44V fully charged)
[16:54:42] <XXCoder> but when motor is running its power is unsteady
[16:54:49] <XXCoder> getting worse as it warms up
[16:54:59] <XXCoder> till lights flicker a little everywhere
[16:55:13] <XXCoder> rough idle when headlights dim
[16:55:24] <Tom_itx> zeeshan-mobile is that on the wrecker?
[16:55:56] <JT-Shop> rained like hell for a few hours then quit
[16:56:12] * Tom_itx wonders if it rains in hell
[16:56:27] <Tom_itx> sauna
[16:57:17] <XXCoder> Tom_itx: if point in hell is torture, then it will have whatever weather it is that is worse to you
[16:57:23] <Tom_itx> http://www.intellicast.com/National/Radar/Current.aspx?animate=true&location=USKS0523
[16:57:30] <XXCoder> meaning as soon as youre used to heat it turns snowy
[16:57:36] <Tom_itx> looks like the freeze is staying W of us for now
[17:00:42] <zeeshan-mobile> yes tom
[17:01:04] <Tom_itx> you should just have him back up to the edge of that bridge
[17:02:50] <zeeshan-mobile> haha
[17:02:55] <zeeshan-mobile> i like the car
[17:03:15] <zeeshan-mobile> gas turbo cars are a problem
[17:08:02] <Tom_itx> man i'm not sure where to start on this last part
[17:10:29] <anomynous> Bible says that in hell there is shame and terror consumes those who are there.
[17:10:45] <malcom2073> It says a lot of things
[17:10:55] <malcom2073> Including thou shalt not boost
[17:11:04] <anomynous> what else is there in hell?
[17:11:11] <malcom2073> Rotary motors only
[17:11:24] <malcom2073> Well, rotary and non-turbo diesels
[17:11:25] <anomynous> theres no rotary motors in hell according to the Bible.
[17:11:28] <anomynous> :)
[17:11:36] <malcom2073> You're reading the wrong translation then :P
[17:11:42] <anomynous> no, im not
[17:12:02] <Tom_itx> zeeshan-mobile can you open pdf?
[17:12:08] <zeeshan-mobile> ya
[17:12:18] <Tom_itx> was gonna show you this last part
[17:12:37] <zeeshan-mobile> link
[17:12:43] <Tom_itx> not there yet
[17:15:09] <anomynous> mushrooms and onion :)
[17:15:36] <anomynous> mushroom salad
[17:15:47] <Tom_itx> zeeshan-mobile, i posted you the link
[17:16:19] <Tom_itx> i think i figured out how i'm gonna do it
[17:16:46] <zeeshan-mobile> looks annoying lol
[17:17:01] <zeeshan-mobile> id prolly start with the section view
[17:17:07] <Tom_itx> i'll do the square block first
[17:18:10] <Tom_itx> i did 34 in about an hour
[17:19:44] <zeeshan-mobile> :)
[17:20:15] <Tom_itx> most of that was just mirroring
[17:24:36] <JT-Shop> Tom_itx: where is the link to the part?
[17:25:23] <Tom_itx> pm
[18:11:39] <CaptHindsight> April 1st 2016 launch date
http://hothardware.com/news/arca-space-corp-unveils-turbine-powered-hoverboard-to-mcfly-you-back-to-the-future-for-20k
[18:17:57] <JT-Shop> I leave you with this tune
https://www.youtube.com/watch?v=Vp0qi80AvZM
[18:18:55] <JT-Shop> best if kinda loud
[18:21:31] <Tom_itx> heh
[18:21:45] <Tom_itx> JT-Shop, i'm a little confused about the base of the part
[18:22:48] <JT-Shop> base as the top drawing?
[18:23:03] <Tom_itx> top and center bottom
[18:23:07] <Tom_itx> the narrow side
[18:23:22] <Tom_itx> the overhang on the bottom
[18:23:26] <Tom_itx> i have the round part
[18:23:57] <JT-Shop> the perpendicular hole to the hole with the key?
[18:24:14] <Tom_itx> yeah
[18:24:22] <Tom_itx> i've got the hole though
[18:24:29] <Tom_itx> it's the bottom feature i'm working on
[18:24:58] <JT-Shop> I'd make the block big enough for that feature and just cut it away
[18:25:00] <Tom_itx> the hole hangs below the main body a bit
[18:25:07] <JT-Shop> then cut from the side
[18:25:07] <Tom_itx> i did
[18:25:26] <Tom_itx> my numbers are off somewhere a tiny bit
[18:26:27] <JT-Shop> I love drawings that make you think
[18:26:33] <Tom_itx> me too
[18:26:49] <malcom2073> You know what would be cool?
[18:26:54] <Tom_itx> other than the little holes i've about got it
[18:27:12] <malcom2073> If there was a software I could feed this into:
http://i.imgur.com/ZpsWXrD.png and it would generate two toolpaths, for two different size bits to draw down the center of the paths
[18:27:16] * JT-Shop wanders inside to cook some chicken and dumplings
[18:28:23] <Tom_itx> the path would be the same
[18:28:27] <Tom_itx> if it's center cut
[18:29:07] <malcom2073> I'd like to have it center cut that out
[18:29:12] <Tom_itx> what did you draw that in?
[18:29:17] <malcom2073> It's a SVG and DXF
[18:29:36] <Tom_itx> the 'tubes' is just a single cutter path?
[18:29:40] <malcom2073> yeah
[18:29:50] <malcom2073> I'd like it to be at least heh
[18:29:54] <Tom_itx> so draw a line down the center of them
[18:30:03] <Tom_itx> and around the center of the arc
[18:30:06] <malcom2073> That's fine for simple things like a line, but for things like th font, it's near impossible
[18:30:22] <Tom_itx> change the font?
[18:30:30] <malcom2073> I can't afford a full set of engraving fonts :P
[18:31:10] <malcom2073> engraving fonts == fonts that do exactly that, have lines down the middle. They're not typically cheap, and the free variety are really limited
[18:31:10] <Tom_itx> http://tom-itx.no-ip.biz:81/~webpage/cnc/pendant/pendant2.jpg
[18:31:14] <Tom_itx> i did those with mine
[18:31:26] <malcom2073> What font?
[18:31:33] <Tom_itx> i don't remember
[18:31:39] <Tom_itx> it's in the cad cam
[18:31:39] <malcom2073> More importantly, what did you use to output it?
[18:31:46] <Tom_itx> smartcam
[18:31:48] <malcom2073> Ah yeah,
[18:31:53] <malcom2073> That's cam specific heh
[18:32:00] <malcom2073> Standard system fonts don't do that :P
[18:32:15] <malcom2073> cambam has something similar, but I don't want to make this whole thing inside the cam package
[18:32:49] <Tom_itx> umm, i forget that graphic package...
[21:13:50] <floppydiskph>
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}