Back
[02:59:29] <Deejay> moin
[03:50:38] <zhivko> Hi guys!
[03:51:20] <zhivko> Question here: Is there cheap solution for ethernet servo motors with encoder ?
[03:52:01] <zhivko> I mean, to be able to send tcp and servo motor will interpret it ?
[03:54:09] <zhivko> I want them to be synchronized to be used in 4axis CNC
[03:54:14] <zhivko> Anybody here?
[04:01:04] <SpeedEvil> zhivko: how well?
[04:01:15] <SpeedEvil> Cheap solution would be esp8266 + RC servos.
[04:01:15] <zhivko> HEy SpeedEvil!
[04:01:33] <zhivko> :) I already build that :)
[04:03:15] <zhivko> https://plus.google.com/+KlemenZhivko/posts/achn3kKYTvv
[04:04:02] <zhivko> but esp8266 is not prooffull, since it doesnt have separate chip for wifi.
[04:04:30] <zhivko> I was thinking about:
http://www.aliexpress.com/item/LinuxCNC-EMC2-ethernet-4-Axis-max-3MHz-pulse-motion-control-card-20-input-IO-8-output/32468176459.html
[04:05:00] <SpeedEvil> 'seperate chip for wifi' is pretty irrelevant, done properly, you have the motor handling on a interrupt.
[04:06:51] <zhivko> speedevil - what about this aliexpress link I sent - do you think this works OK ?
[04:07:12] <zhivko> they say they send driver for linuxcnc
[04:08:02] <archivist_herron> zhivko, geared axes in linuxcnc is known art
[04:08:27] <zhivko> speedevil - geared axis ? what do you mean?
[04:08:45] <zhivko> rack and pinion ?
[04:09:05] <zhivko> archivist: what's the issue there? Why is that an issue ?
[04:10:04] <archivist_herron> not an issue
[04:10:40] <zhivko> As I know CNC by know - it seems that ethernet servo with encoder motor could solve all this issues - fast mbit ethernet and linuxcnc...
[04:11:04] <zhivko> HAs somebody thought about this ? Has somebody did something similar in diy way ?
[04:12:20] <archivist_herron> linuxcnc and ethernet using the mesa cards works, what is not being looked at is the closed source ethernet drivers
[04:17:46] <zhivko> archivist: "closed source" is closed loop with encoder servo? Sorry I don't speek CNC language very fluently... Can you please help me understand?
[04:19:05] <archivist_herron> companies own the protocol used over ethernet
[04:19:23] <archivist_herron> we cannot use copyright protocols
[04:19:47] <zhivko> mesa card is not opensourced?
[04:20:00] <archivist_herron> mesa is opensource
[04:20:23] <zhivko> Where can I find more info - for example sample configuration of linuxcnc with mesa card
[04:20:37] <zhivko> I need to build 4 axis cnc..
[04:21:14] <archivist_herron> what we dont have is ethernet direct to ethernet servos
[04:22:56] <archivist_herron> http://linuxcnc.org/docs/html/
[04:27:23] <zhivko> I see there are some industrial servos that have closed loop ethernet support - So how can I aproach this from linuxcnc ? No way currently ?
[04:31:11] <Sync> http://wiki.linuxcnc.org/cgi-bin/wiki.pl?EtherCatDriver
[04:36:06] <zhivko> Sync: what servo ethernet provider (cheap possibly) can I choose from - can you recomend something ?
[04:38:04] <Barfious_PC> So recently I took apart a large copy machine.
[04:38:37] <Barfious_PC> I recovered lots of motors, steppers, rods, all sorts of sensors
[04:39:29] <Barfious_PC> there are these optical sensors throughout the machine, and I think it might be possible to build an encoder with them
[04:40:17] <Barfious_PC> I've seen some neat videos where this german guy made a closed loop dc servo with an H bride, and a home made encoder
[04:40:48] <SpeedEvil> You can buy actual specified encoders
[04:40:51] <SpeedEvil> cheapl
[04:40:51] <SpeedEvil> y
[04:40:58] <Barfious_PC> yeah but what is the fun in that
[04:41:14] <SpeedEvil> Being able to make another servo after you run out of scavenged parts.
[04:41:31] <Barfious_PC> these are my playing around and learning projects
[04:41:47] <Barfious_PC> I've already got my mill to satisfy doing it right
[04:41:50] <SpeedEvil> Fair enough
[04:42:03] <Barfious_PC> here one second
[04:42:31] <Barfious_PC> https://www.youtube.com/watch?v=PQ1FBcQT0AI
[04:43:02] <Sync> zhivko: ethercat and cheap does not go together
[04:43:26] <Barfious_PC> if you jump to around 5 minutes , you can see he made an encoder with a two optical sensors
[04:43:38] <zhivko> I am looking for closed loop servo (with encoder), that can be connected to ethercat. Lets say Less Expensive :)
[04:43:45] <MrSunshine> hmm this with table for the router is hard ... made it out of mdf .. and ofc it warps like crazy when skimming it off making vacuum seal not working to great and stuff :/
[04:43:46] <Barfious_PC> and a wheel made from a cd. I'm sure I could cut a wheel out on my mill
[04:43:56] <MrSunshine> and thick plastic sheets are frekkin expensive :/
[04:44:21] <zhivko> Barfious_PC: I dont want to make this closed loop by myselve, I have tight deadlines...
[04:44:36] <MrSunshine> thinking of making the table bottom in steel and then have a sacrificial sheet on top but i dont know :/
[04:44:58] <Barfious_PC> if i was making a vac table i would go aluminum
[04:45:08] <Barfious_PC> but that would be for my mlll
[04:45:44] <Barfious_PC> this guy is doing this encoder with an arduino , but i was wondering, can you read two optical sensors like that directly from the parport?
[04:45:51] <Barfious_PC> i mean with linuxcnc
[04:46:15] <MrSunshine> Barfious_PC: problem is that the table is 125x125cm =)
[04:48:34] <Barfious_PC> I just want to know if theoretically its possible to read a diy encoder like that from the parport using a wheel and two optical sensors
[04:48:39] <MrSunshine> maybe make it out of corian :P
[04:48:43] <MrSunshine> tho thats quite expensive :P
[04:48:48] <MrSunshine> but a nice material =)
[04:49:41] <Barfious_PC> MrSunshine: im not understanding , is 125x125 cm too big or too small for aluminum?
[04:50:20] <MrSunshine> Barfious_PC: big to make it out of i think .. tho might not be but feels big =) sheets that size and like 12mm thick would be quite expensive also =)
[04:50:45] <MrSunshine> and do not have the means to weld alu :/
[04:51:28] <MrSunshine> then again .. i do not have the means to glue corian either :P
[04:51:32] <Barfious_PC> do you have a high speed spindle?
[04:51:42] <MrSunshine> Barfious_PC: 24k rpm on the router
[04:52:07] <Barfious_PC> melt hdpe into a slab
[04:52:18] <Barfious_PC> and mill it
[04:52:45] <Barfious_PC> or polyproplene
[04:53:07] <Barfious_PC> in an oven
[04:53:14] <MrSunshine> a slab of 125x125cm ?
[04:53:27] <MrSunshine> thats about 50x50 inches
[04:53:35] <MrSunshine> if you do not speak cm =)
[04:53:46] <Barfious_PC> yeah lol i just converted it
[04:54:02] <Barfious_PC> you probably dont have access to an oven that size
[04:54:30] <MrSunshine> 460 usd for a sheet of 2x1 meter of 12mm alu :P
[04:56:21] <MrSunshine> oh well, dogwalk!
[04:57:40] <Barfious_PC> how about some hardwood
[04:57:55] <MrSunshine> wood bends and bows and changes with humidity :/
[04:58:01] <MrSunshine> not very good for a table realy :/
[04:58:13] <Barfious_PC> how about impregnate it with epoxy
[04:58:49] <Barfious_PC> idk anything denser than wood that size and likely thickness, price tags
[04:59:21] <Barfious_PC> some composite material
[05:00:02] <Barfious_PC> i wish the market for plastic / fiber composites was better
[05:00:20] <Barfious_PC> there are some cool plastic / mineral composites too
[05:02:17] <Barfious_PC> expand budget
[05:16:42] <archivist_herron> zhivko,
http://wiki.linuxcnc.org/cgi-bin/wiki.pl?EtherCatDriver
[05:17:06] <archivist_herron> but you probably have a certain amount of work to do
[05:19:19] <zhivko> archivist_herron: OK - but to estimate cost with full ethercat solution - can you help me to find 2NM closed loop stepper that supports ethercat - its 4 axis CNC
[05:19:43] <archivist_herron> best to forget ethercat
[05:19:54] <archivist_herron> just use normal stuff
[05:27:26] <Tecan> https://scontent.xx.fbcdn.net/hphotos-ash2/v/t1.0-9/q81/s720x720/10520772_391799844318762_6658492397936095669_n.jpg?oh=c761de93021b0e141c45c06b48a3b736&oe=56B71A52
[05:28:11] <Tecan> xmas tree decoration for the side of house
[05:37:14] <gonzo_> morning peoples
[05:37:55] <gonzo_> have some more silly basic questions to fire into the aether, hoping someone will enlighten me
[05:38:55] <gonzo_> have a testbed set up, using the hal stepper config, but I have changed one axis to servo.
[05:39:53] <gonzo_> the closed loop control of the motor looks good amd I have the encoder output feeding back to axit.00.motor-fb (from mem, as I'm not near the machine at the mo)
[05:40:52] <gonzo_> I see the encoder posn in the AXIS display and have it set to show the actual position rather than the planned posn for the tool
[05:41:29] <gonzo_> But what I seem to be getting on the graphic for the tool, is the target posn, not the actual
[05:43:21] <gonzo_> also, it seems to be ignoring the encoder posn when moving the tool. eg. the tool will move into the work, before the X (servo) has actually reached the new cut posn
[05:43:59] <gonzo_> looking like the motion planner (if that is the correct term) is not seeing the actual encoder posn
[05:44:21] <gonzo_> anyone give me a pointer where the prob could be
[06:00:08] <archivist_herron> gonzo_, you would be getting following errors
[06:04:02] <gonzo_> am I correct in setting axis.00.motor-fb from the encoder
[06:04:56] <gonzo_> there is a comment in the example that this is to send the value to the display in AXIS graphic prog. But I think this may be incorrect
[06:05:09] <gonzo_> axis.00.... is the motion planner???
[06:09:25] <archivist_herron> http://linuxcnc.org/docs/html/man/man9/motion.9.html
[06:14:04] <gonzo_> thanks. Looks like I have it correct. The reference to AXIs in the comment block is misleading
[06:16:25] <gonzo_> so if I am sending the actual position to motion, why would AXIS be displaying the target posn rather than the actual
[06:16:44] <gonzo_> and the tool path seems to be ignoring this actual posn?
[06:17:58] <archivist_herron> have you connected stuff incorrectly in the files
[06:20:20] <gonzo_> I don't think so. As I am seeing the correct actual encoder position in AXIS prog
[06:20:57] <gonzo_> I mean the displayed X poxn value
[06:21:33] <gonzo_> though the tool icon on the graphic seems to follow thetarget path
[06:41:34] <XXCoder> gonzo_: hope you find solution
[06:44:08] <gonzo_> ta. me too!
[06:44:40] <gonzo_> really am starting from the basics here, so lots of silly questions
[06:46:00] <gonzo_> this seems quite a US centric chan, so will re-ask when they are all awake!
[06:47:53] <XXCoder> yeah im american too but Im awake 1 pm to 5 am usually
[06:47:57] <XXCoder> its now 4 am
[06:48:55] <Tecan> LINUX
[06:49:16] <Tecan> FTW
[06:49:35] <malcom2073> Every time I see someone say something like that, I just think of the whole "Team Jacob" thing
[06:49:44] <malcom2073> It makes me chuckle though :P
[07:24:50] <jthornton> is the lower image in this page out of place
http://gnipsel.com/recipes/index.html
[07:25:02] <malcom2073> The background is out of place
[07:25:08] <malcom2073> I thought I was on ytmnd
[07:25:47] <jthornton> it looks ok local but online it's messed up for m
[07:25:48] <jthornton> e
[07:26:40] <_methods> is it supposed to be centered?
[07:27:17] <malcom2073> what it looks like to me:
http://i.imgur.com/GTnq43q.png
[07:27:35] <_methods> yep me too
[07:28:17] <XXCoder> meow mix
[07:28:48] <XXCoder> be careful what you brag to superman. heh
http://smbc-comics.com/index.php?db=comics&id=788#comic
[07:29:40] <jthornton> this is what I see
http://ibin.co/2NCpeIXO10oc
[07:30:05] <jthornton> yours look right
[07:30:44] <malcom2073> Yours looks like you need to get out of the 80's with your video card :P
[07:31:16] <jthornton> brand new computer lol
[07:31:34] <XXCoder> my 9 year old pc could do larger res
[07:32:43] <malcom2073> My 7 year old PC *does*
[07:53:07] <lair82> Good Morning Guys, have a question regarding my new servo, should tune the drive/servo with the servo mounted in the rotary table, or should I tune the servo by itself on the table then install the motor after it is tuned?
[07:54:29] <lair82> I'm not referring to the cnc tuning, just getting the servo tuned to the drive itself
[07:57:21] <archivist_herron> with the mass mounted I would assume
[08:29:15] <CaptHindsight> I don't know much about machine design or servos but I have a revolutionary design I'd like to use. Can someone help me and I will only argue and hand wave for possibly 30 minutes about it :)
[08:29:49] <ReadError> thought I was in #reprap for a second there
[08:29:53] <archivist_herron> just put it on kickstarter the loons will buy regardless
[08:33:22] <archivist_herron> call it the Lemon, mention it is made only on Friday afternoons just before home time
[08:34:50] <archivist_herron> http://www.phrases.org.uk/meanings/143350.html
[08:36:34] <CaptHindsight> archivist_herron: we had something similar here but it went on further to explain why you also didn't want a Monday or Wednesday car either
[08:36:34] <archivist_herron> iirc the term was in common use in the 1970's
[08:37:10] <greg> I'm finally getting to electronics in my lathe. I have Mesa 7i76, but might want to use 7i77 instead. I don't know much about this stuff, is anything additional required to run a spindle with 7i77? The spindle with run VFD and machine has 360ppr+index.
[08:38:28] <JT-shop> are your axes stepper or servo?
[08:40:29] <greg> servos, I was planning for gecko drives, because I had experience with them. I may just set it up to close the loop in linuxcnc instead.
[08:46:36] <JT-shop> good plan
[08:47:04] <JT-shop> G320's are for when you don't have hardware like Mesa
[08:50:59] <archivist_herron> I find it hard to think of stepdir things as proper servos
[08:54:51] <greg> I can't complain about how they work on a mill I built a long time ago.
[09:39:34] <ktchk> Hi Kimk
[09:40:57] <ktchk> Will Linuxcnc drive a tangent knife??
[09:45:35] <_methods> like this?
[09:45:37] <_methods> http://imgur.com/gallery/xFkhofN
[09:47:16] <ktchk> cutting air, no
[09:47:20] <_methods> hehe
[11:03:45] <lair82> pcw_home, you floating around yet?
[11:23:57] <FinboySlick> _methods: Should have been a butterfly knife, like in those '80s movies.
[11:25:15] <_methods> heheh
[11:25:27] <_methods> butterfly knife tentacle
[11:25:33] <_methods> sounds like a good password
[11:25:45] <FinboySlick> Not anymore!
[11:25:52] <_methods> hahaha
[11:27:17] <CaptHindsight> words you probably won't hear at Thanksgiving dinner
[11:28:44] <CaptHindsight> I started getting emails yesterday about people being gone until Dec 1
[11:31:32] <CaptHindsight> looks like the last 2 weeks of December are going to be dead as well
[11:32:04] <CaptHindsight> with xmas and new years on Fridays
[11:35:38] <Jymmm> (NSFW) Can you find the red boots?
https://i.imgur.com/yWqtYG2.jpg
[11:39:00] <Jymmm> CaptHindsight: And nobody works on those days, so exclude the day(s) before then too.
[11:39:09] <CaptHindsight> Jymmm: you know I've heard that there are websites with tons of those things on the intertubes
[11:39:51] <Jymmm> CaptHindsight: Hi-res, no ads, direct link?
[11:39:54] <CaptHindsight> Dec 18 - Jan 4
[12:55:12] <FinboySlick> Well, since it's fancy picture day:
http://img.pandawhale.com/159155-otter-dinner-table-gif-Imgur-T-PvAn.gif
[13:16:54] <_methods> why i otter
[13:21:14] <SpeedEvil> http://imgur.com/gallery/KYo5P I never thought she could fit those balls in her mouth (sfw)
[13:24:17] * JT-shop just saved the jig saw from going in the recycle bin after getting ran over with the dozer with a sliver of wood
[13:26:19] <SpeedEvil> err - what?
[13:26:26] <SpeedEvil> you mean you repaired it with wood?
[13:44:23] <JT-shop> yea jammed a sliver of wood behind the lock
[13:52:35] <andypugh> Installing all the dependencies to build linuxCNC, I ran out of disk space.
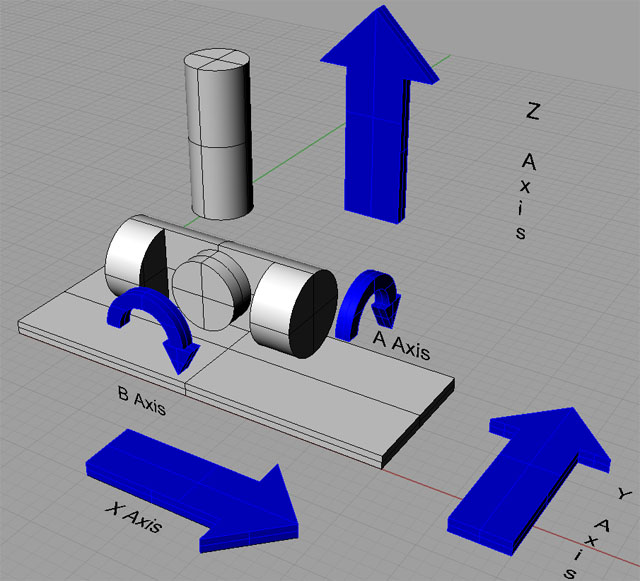
[13:52:41] <lair82> Hey guys, working on my A-axis, if I am looking straight at the faceplate on the rotary, and I command a positive move, should it spin CW or CCW? Obviously pretty elementary considering, but I have never dealt with one of these.
[13:52:47] <andypugh> So, I purged all the applications I knew I wouldn’t need.
[13:53:10] <andypugh> Like Libre Office, VLC, that sort of thing.
[13:54:12] <andypugh> Then I did “Sudo apt-get autoremove” and watched in astonishment as it removed lightdm, X11, and just about everything else. Including whatever resolves domain names to get things back again. That could have gone better.
[13:55:13] <cradek> heh it's always good to read the screen before agreeing to a big removal. I've screwed that up in recent memory too.
[13:55:18] <cradek> recent
[13:55:26] <_methods> just hit y
[13:55:31] <_methods> like a boss
[13:57:00] <rob_h> lair82, plus move on a Rotary is generaly CW .. but depends on machines and setups.. as normaly cam posts are coustomized to machine setups when get multi axis
[13:57:12] <andypugh> So, is it possible to remove Libre office and retain a GUI OS?
[13:58:00] <cradek> I suspect you had that, right until you did the autoremove
[13:58:23] <cradek> autoremove removes things that were initially installed because they were a dependency of something else, but that something else is now gone
[13:58:40] <lair82> rob_h, opposite of this then?
http://www.cnccookbook.com/img/CNCCookbook/5AxisMillAxes.jpg
[13:58:47] <andypugh> cradek: Any way back other than reinstalling from scratch? I already spent two evenings trying to get a system that I could build linuxCNC on
[13:58:58] <greg> http://www.mfgaa.com/5axis.table.table.jpg
[13:59:10] <lair82> It said that the arrow points in the positive g-code dimension
[13:59:33] <cradek> what do you mean by back exactly? (I wish there was an undo in apt)
[14:00:03] <cradek> if you do an install command with the same things you removed, I think it will be exactly back
[14:00:10] <lair82> Well that just confused the shit out of me
[14:00:31] <andypugh> lair82: That cnccookbook picture is inconsistent
[14:00:49] <Jymmm> There is a way using git + apt, but it has to be setup in advance.
[14:01:02] <andypugh> Looking along the X and Y arrows has A anticlockwise and B cllockwise
[14:01:04] <rob_h> is your A axis in the Y axis or in the X axis like most have it
[14:01:15] <lair82> Makes sense now after looking at the x and y
[14:01:25] <lair82> No the A is on the X
[14:01:31] <cradek> yeah that image has got to be wrong
[14:01:40] <greg> crap, the one I posted is dumb too.
[14:01:42] <andypugh> cradek: Hmm, I wonder what to start with? X11?
[14:01:45] <cradek> A,B should both be RH or both LH
[14:02:05] <rob_h> like on our matsuura we have C and B axis... C rotary.. B is tilt
[14:02:24] <lair82> I will go with greg's
[14:03:13] <cradek> andypugh: I think the metapackages are called task-something. I see task-desktop and task-xfce-desktop for instance
[14:04:32] <cradek> but those will put whatever-office back I'm sure
[14:04:56] <andypugh> I think I am screwed. apt can’t resolve any URLs
[14:05:06] <cradek> wow :-/
[14:05:53] <andypugh> Is there a “light” Debian?
[14:05:58] <cradek> what was your install originally? is it just our image, but your space is small?
[14:06:12] <andypugh> I “only” have 8GB
[14:06:25] <andypugh> Yeah, LinuxCNC .iso
[14:06:26] <_methods> yoikes
[14:06:31] <Jymmm> http://stackoverflow.com/questions/8647454/how-to-get-a-list-of-repositories-apt-get-is-checking
[14:06:42] <cradek> 8 seems like it would be enough
[14:06:51] <cradek> do you care about building linuxcnc packages, or just rip without docs?
[14:07:32] <andypugh> just a rip, really
[14:07:48] <cradek> the docs toolchain is probably what was so big
[14:07:52] <cradek> it pulls in a lot of stuff
[14:08:01] <andypugh> Well, yes.
[14:08:28] <andypugh> But I am sure it all fitted with Lubuntu
[14:08:47] <cradek> if you reinstall and then remove office again (and read the screen carefully before saying yes), and then don't do the autoremove, you might be ok?
[14:09:02] <andypugh> Well, I know it did, the machine in question was my LinuxCNC dev box for a couple of years
[14:09:51] <andypugh> All I want is kernel + GUI. The rest I can install as-required
[14:10:19] <andypugh> (Help me! I am being drawn to Gentoo…)
[14:11:21] <greg> 4th orientation can go either way, like was said you can configure it in your CAM post.
[14:11:36] <__rob> hello
[14:12:17] <CaptHindsight> andypugh: there used to be trimmed down versions of Debian available
[14:12:20] <__rob> anyone know of any nice motor that will run extremely smoothly at very low speed
[14:12:25] <__rob> or should i just get a geared one ?
[14:12:50] <cradek> andypugh: I have a VM here. let me see if I can figure out how to uninstall whateveroffice without screwing the pooch.
[14:13:01] <CaptHindsight> we did a debian liveCD with coreboot and flashrom tools that fit on a CD a few, heh several years ago now
[14:13:37] <andypugh> cradek: Don’t worry about it. I only wanted the dev stuff to look at the problem that Deway just fixed :-)
[14:13:44] <cradek> aw jeez
[14:13:51] <cradek> dewey's awesome
[14:13:51] <greg> geared motor could be smaller if it matters
[14:13:59] <andypugh> He fixed the problem in less tome than it took me to install a dev system
[14:14:05] <__rob> yea, I ideally want it nema 8
[14:14:08] <__rob> or there abouts
[14:14:11] <__rob> I have a stepper at the moment
[14:14:22] <__rob> but even with 128 microstepping its not ultra smooth
[14:14:53] <__rob> thats already geared with a timing pulley 4:1
[14:14:53] <lair82> Ok, now I have that figured out, and now I know that my encoder FB is opposite of what it is doing, would it be proper to reverse the A with /A, B with /B and Z with /Z?
[14:14:56] <andypugh> __rob: A brushless servo with sinusoudal commutation from a high-count encoder
[14:15:06] <greg> servo motor
[14:15:13] <lair82> To get my FB reversed3
[14:15:24] <__rob> problem is I couldn't find servos cheap that did the resolution I wanted
[14:15:25] <CaptHindsight> andypugh:
https://wiki.debian.org/DamnSmallLinux
[14:15:32] <andypugh> lair82: Just put a negative number in the encoder scale in HAL.
[14:15:36] <__rob> I have a 17 bit encoder working with this
[14:15:36] <CaptHindsight> might be too small
[14:15:38] <__rob> already
[14:15:52] <__rob> so really I just want the geared motor part of the servo
[14:15:56] <lair82> AAAAHHHHHH, very nice, thank you andypugh
[14:16:08] <__rob> do they come without the encoder ?
[14:16:19] <greg> you can find them without
[14:16:31] <greg> maxon, faulhaber
[14:16:33] <__rob> I always assumed servo motor was including encoder
[14:16:33] <andypugh> A geared motor will introduce backlash. Does that matter?
[14:16:52] <__rob> and it was just a geared motor otherwise
[14:17:58] <greg> technically I suppose, servo motors are generally rated differently and have no/little cogging.
[14:18:05] <cradek> andypugh: I removed libreoffice* and then did autoremove, and it freed 500MB and things still seem to work ok
[14:18:21] <__rob> right, any suggestions of any (quality) motors in that kind of size ?
[14:18:22] <__rob> or smaller
[14:18:37] <__rob> I really want to drive it like a bldc
[14:18:45] <__rob> not pwm or something
[14:18:46] <cradek> andypugh: oh wait I may have done a thing that affected it - starting again
[14:19:07] <greg> maxon or faulhaber, both do PMDC and BLDC
[14:19:10] <andypugh> I killed Brasero too, and VLC
[14:19:27] <andypugh> Not too clear what triggered the over-ambitious cleanup
[14:19:48] <CaptHindsight> I'd test your trimming down of debian for a while before you feel that it's ready
[14:19:54] <greg> what do you mena no pwm
[14:20:28] <__rob> well aren't most servos setpoint with a pwm to set the target position
[14:20:57] <__rob> rather then explicitly commutating the phases myself
[14:20:59] <__rob> to get it to move
[14:21:51] <greg> you can get drives which use step/dire, linear, or pwm signals
[14:21:52] <cradek> after removing libreoffice* vlc brasero, I still get a reasonable-looking autoremove
[14:22:06] <__rob> ahh ok
[14:22:30] <__rob> so whats the actual difference between a servo without encoder and bldc ?
[14:22:33] <__rob> something in the windings ?
[14:22:37] <greg> none
[14:23:11] <__rob> right, so just the gearing then ?
[14:23:19] <__rob> but the motor is the same
[14:23:28] <greg> could be used to do the same thing. servos are generally much lower rated, better insulation, skewed armature and expensive.
[14:23:43] <andypugh> cradek: Clearly you are more l33t in the pruning department
[14:24:02] <__rob> yea, only complete servos I found that had 17 bits of precesion or more were crazy expensive
[14:24:09] <greg> yeah
[14:24:14] <__rob> the actual encoder cost me £60 all in
[14:24:18] <cradek> andypugh: wonder what else you caught in your prune
[14:24:19] <__rob> with the disc
[14:24:46] <__rob> effectively making my own hi-res servo, but I want as much done as possible, so geared up would be ideal
[14:24:50] <__rob> this stepper is just not cutting it
[14:25:04] <andypugh> cradek: Well, had it been a hedge cutter, it would have been equivalent to at least a lower limb.
[14:25:37] <cradek> emc
[14:25:49] <andypugh> __rob: For the smoothest possible, you might want a resolver. But that would have to be second-hand from eBay
[14:25:51] <cradek> oops now everyone knows my password
[14:26:26] <andypugh> If that is your password, then there are lawyers who would like a word..
[14:26:28] <cradek> yeah after removing those 3 things, then doing autoremove, the install is 2.7 GB
[14:26:48] <cradek> (looks like my virtual disk is 4 GB)
[14:26:55] <__rob> andypugh, yea I need to make a few
[14:27:02] <__rob> so I need to be able to get more compontents
[14:27:05] <__rob> never heard of a resolver
[14:27:19] <cradek> build-dep linuxcnc says 523 MB
[14:27:55] <andypugh> That’s odd, the checkbuilddeps list installed 1.7GB
[14:28:29] <cradek> I bet this doesn't include build-essential
[14:28:39] <andypugh> __rob: Resolvers are analogue and absolute. Great for smooth commutation.
[14:29:16] <greg> I spent a bunch of time looking for nema23 size or smaller to replace a Maxon DC 28mm motor. Finally found a brushless. Now I need a drive to work with 7i77.
[14:29:28] <__rob> yea, well 17 bits should be enough
[14:29:50] <greg> what does this motor do?
[14:30:00] <andypugh> greg: what voltage?
[14:30:03] <greg> 48V
[14:30:37] <andypugh> I have some 24V brushless drives going spare. But you probably want to look on eBay for AMC
[14:31:06] <greg> I have a few AMC i bought some time ago before i knew about PWM input.
[14:32:05] <andypugh> cradek: I just booted from USB to install LinuxCNC / Debian, and it turns out I used the Lubuntu stick by mistake.
[14:32:07] <greg> 24V would work too.
[14:32:31] <cradek> oh ok, so my tests are invalid
[14:32:39] <andypugh> I probably shouldn’t be allowed near computers
[14:32:52] <__rob> andy, the motor turns :)
[14:32:54] <cradek> and maybe that's why it didn't fit in the first place - they probably have a lot more thingies
[14:33:16] <andypugh> cradek: No, I _was_ on Debian, but just put the wrong stick in for the reinstall attempt
[14:33:21] <__rob> but I basically want smooth movement and good position feedback
[14:33:40] <__rob> not to worried about the motor being at pos X, as long as I know its as Y
[14:34:05] <greg> I installed 2.7pre a few months back on a 4GB CF from the iso, don't rember quite how big it ended up.
[14:34:51] <cradek> after removing those 3 things, autoremove, build-dep linuxcnc, the install is 3.5GB, 97% of my 4G disk
[14:36:54] <andypugh> That sounds good
[14:37:06] <andypugh> That’s excluding the docs package, I assume?
[14:37:24] <cradek> no, I let it do all the build-dep things it wanted
[14:37:38] <cradek> should be all that's needed to build the debs
[14:38:24] <__rob> andypugh,
http://www.micromo.com/products/brushless-dc-motors/brushless-dc-servomotors
[14:38:43] <__rob> so these motors it says "servo motor", presumably that is just he motor then, no encoder
[14:39:05] <__rob> looking at the rpm it seems to fast to be heavily geared
[14:39:36] <andypugh> Thord table lists encoder versions
[14:39:37] <greg> you can configure them with encoders or without, but if without makes you you have a shaft to mount one.
[14:39:54] <__rob> right, but what about gearing?
[14:40:02] <__rob> presumably they wont run very very slow
[14:40:32] <__rob> basically the best I've got so far was with a "gimbal motor" for RC quadcopters, I could run that extremely slow. but still had 'jerky' bits in it
[14:40:39] <__rob> so I think gearing is essential for hte speed I want to run
[14:41:13] <greg> also with(out) any ratio available, RPM also depends on the winding, several will be available.
[14:41:52] <__rob> really it seems my best option is any kind of bldc, 'servo' or otherwise
[14:41:56] <__rob> and a nice gearbox
[14:42:01] <__rob> something thats like 500:1
[14:42:58] <greg> what is your rpm?
[14:43:23] <__rob> maybe 0.1 slowest
[14:44:18] <andypugh> It really comes down to the toque you want
[14:44:28] <__rob> there is very little load
[14:44:36] <__rob> mabye 10grams
[14:45:02] <andypugh> Those motors have torques in the order of several mNm
[14:45:15] <greg> what was the problem with the gimbal motor?
[14:45:24] <andypugh> 10g isn’t a load, that’s a mass
[14:45:30] <__rob> I have a video at hand!
[14:45:32] <__rob> 1 sec
[14:45:36] <andypugh> Work out the torque you need
[14:46:37] <__rob> https://goo.gl/photos/JmkwVNwTVkqThuUh6
[14:47:01] <__rob> you can see it suddenly jumps a little bit
[14:48:14] <greg> how are you driving it?
[14:48:31] <__rob> thats with a microcontroller and a stm bldc driver
[14:48:43] <McBride36> RIP lathe bit
[14:48:52] <__rob> L6234
[14:49:03] <__rob> with sine wave style commutation
[14:49:08] <__rob> works ok
[14:49:21] <__rob> but its not ultra smooth
[14:49:53] <andypugh> Is that in closed-loop position control?
[14:50:05] <__rob> no, totally open loop
[14:50:23] <greg> hall sensors?
[14:50:24] <andypugh> Your solution is probably to close the loop (either position or velocity).
[14:50:24] <__rob> nope
[14:50:34] <__rob> I was just going to use the encoder
[14:50:36] <__rob> if it worked
[14:50:43] <__rob> rather then look at the backemf
[14:50:46] <__rob> or hall sensor
[14:50:54] <__rob> but, it didn't seem smooth enuf at first test
[14:51:33] <__rob> so you think that could be smoother with a closed loop ?
[14:52:25] <__rob> also, it got pretty hot
[14:53:11] <greg> You are hoping the motor is perfect, it won't be.
[14:53:26] <__rob> mabye reduction is the way forward then
[14:53:42] <__rob> divide the little errors down
[14:53:52] <greg> asymmetry in the motor will cause things like this
[14:54:37] <__rob> right, problem again is that its all a solved problem
[14:54:39] <__rob> for the right price
[14:54:50] <andypugh> I know that it would be smoother with closed loop
[14:55:23] <__rob> yea, but maybe not that much smoother
[14:55:32] <__rob> its orders of magnitude off what I wanted
[14:55:43] <__rob> for that kind of speed
[14:56:16] <__rob> so now the problem becomes finding a nice reduction gearbox
[14:56:39] <andypugh> Think how smoothly a CNC machine moves. That’s all down to closed-loop control.
[14:56:40] <__rob> I bought some of those random 500:1 DC motors and its like the gears are stamped out of a tin can
[14:56:58] <greg> some of that comes from good motors
[14:57:46] <__rob> andypugh, but also geared down quite alot by the leadscrew no ?
[14:57:59] <greg> that is maxon and faulhabers business, first place I would look.
[14:58:13] <__rob> awsome, I will do that
[14:58:28] <andypugh> __rob: I have better things to do with my evening than try to convince you.
[14:58:51] <__rob> lol, I am convinced and appriciate the adivce
[14:58:59] <__rob> I will close the loop
[14:59:10] <__rob> but might just gear it down aswell
[14:59:14] <__rob> thats got to be the best option
[15:00:52] <__rob> just got a tormach pcnc1100
[15:01:04] <__rob> so maybe possible to jsut make the gearbox I want
[15:02:06] <__rob> right, thanks both of you - very helpful
[15:03:23] <FinboySlick> __rob:
https://www.youtube.com/watch?v=7Wti5UCP0DA has no gearing for its linear movement.
[15:03:34] <FinboySlick> Not even a leadscrew.
[15:03:41] <FinboySlick> Or ballscrew.
[15:37:56] <__rob> bet its not a cheap motor tho ? :)
[15:44:41] <CaptHindsight> I'm here for the 5 minute argument
[15:55:19] <FinboySlick> CaptHindsight: I'll just send the otter to end it.
[16:06:18] <duc> Well China strikes again. The wrong cables were sent for my yaskawa motors. They are labeled for 750w motors but really 200-600w motors. Large difference in cable end sizes
[16:06:52] <CaptHindsight> motor is motor, it works
[16:07:04] <FinboySlick> duc: Chinese watts are smaller.
[16:07:23] <duc> Lol.
[16:07:35] <CaptHindsight> ~1:2 or 1:1.5 IIRC
[16:07:41] <duc> They making good paper weights at this rate
[16:08:49] <duc> Any guess what it cost to send shit back
[16:09:03] <CaptHindsight> maybe they meant 750W peak for the cables
[16:09:24] <CaptHindsight> I heard just about every excuse under the sun
[16:10:24] <CaptHindsight> if it fits into a medium USPS flat rate box ~$60
[16:10:25] <duc> So your saying it's a waste of 100 dollars
[16:12:55] <duc> Not even worth the effort at that point. I'm beyond pissed
[16:14:01] <SpeedEvil> OTOH - if china actually had its shit together, there goes much of the remnant of US manufacturing
[16:17:37] <CaptHindsight> http://hackaday.com/2015/11/20/review-voltera-v-one-pcb-printer/
[16:17:56] <CaptHindsight> SpeedEvil: what shit are they missing?
[16:18:16] <SpeedEvil> CaptHindsight: see ducs comment
[16:18:45] <SpeedEvil> Purchasing from china can work well if you're doing large orders and have appropriate contracts and research and ... in place
[16:18:52] <CaptHindsight> nah, they are socializing you to put up with crap
[16:19:28] <SpeedEvil> If they had it together, and you actually always got what it said in the accurately described page, even in small quantities, ...
[16:19:51] <CaptHindsight> well you shouldn't want that
[16:20:20] <CaptHindsight> they are getting everyone to not care or understand specs
[16:20:39] <CaptHindsight> you are considered a dinosaur if you do
[16:25:35] <Deejay> gn8
[16:26:06] <JT-shop> goodnight Deejay
[16:26:19] <Deejay> :)
[16:31:12] <duc> I wonder if the seller will fix the issue. The connectors are hard to buy alone
[16:33:41] <MrSunshine> kinda annoying that the translation from sketchup to fusion 360 ends up in circles becoming alot of flat faces .. :/
[16:34:55] <renesis> cylinders?
[16:35:18] <renesis> doesnt have some sort of stl resolution option?
[16:38:10] <MrSunshine> have to ask the person that gave me the models (im not the one converting from sketchup to brep)
[16:39:12] <MrSunshine> but every single hole in the pieces that is supposed to be round is split up in like 20 faces insted
[16:45:33] <SpeedEvil> http://imgur.com/gallery/VQTBd56 - on the earlier topic of deliveries.
[16:46:44] <andypugh> i would be so annoyed by that! He meant “of your roof”
[16:47:25] <andypugh> (I wonder if he meant to throw the parcel through the open window?)
[16:47:29] <SpeedEvil> likely
[16:48:34] <XXCoder> wow
[16:48:53] <andypugh> Yodel drivers get paid 45p per delivery, and have to supply their own fuel and vehicle..
[16:49:38] <SpeedEvil> andypugh: yeah - delivery can be broken.
[17:08:03] <andypugh> I wish that Debian let you choose UID at setup time
[17:26:56] <yasnak> that new citizen k16e smell. mmm.
[17:29:00] <andypugh> so, I try adduser andypugh sudo and Debian says “The user andypugh does not exist”. Am I missing something?
[17:29:34] <XXCoder> caps?
[17:29:59] <andypugh> I have a number of hats. what are you getting at?
[17:30:19] <XXCoder> no, not hats
[17:30:26] <XXCoder> CAPS and caps
[17:30:31] <XXCoder> capitalizion
[17:33:31] <andypugh> What would I capitalise?
[17:33:49] <andypugh> AdUsEr AndyPugh?
[17:33:53] <XXCoder> dunno what do you use to login?
[17:33:58] <andypugh> root
[17:34:07] <XXCoder> do you just login andypugh?
[17:34:14] <andypugh> I want to
[17:34:14] <XXCoder> oh you havent created user?
[17:34:39] <XXCoder> make user then make it sudoer, sudo enable must have user exist first :)
[17:34:56] <XXCoder> though I dont even remember create user command lol
[17:35:05] <jdh> adduser or useradd
[17:35:24] <andypugh> Exactly. I want to create a new user (andypugh) Debian reponds to “adduser andypugh sudo” with “the user andypugh does not exist"
[17:36:13] <XXCoder> http://linux.die.net/man/8/adduser
[17:37:32] <JT-shop> goodnight
[17:37:55] <XXCoder> do adduser -D andypugh
[17:38:01] <XXCoder> then adduser andypugh sudo
[17:38:13] <XXCoder> oops
[17:38:19] <XXCoder> do useradd -D andypugh
[17:44:02] <KimK_laptop> sudo adduser andypugh ?
[17:44:55] <XXCoder> KimK_laptop: nah hes logged as root
[17:45:09] <XXCoder> dangerous. lol
[17:45:50] <KimK_laptop> OK, just I'm kibitzing anyway, I just happened by. I'll move along now, lol.
[17:46:09] <XXCoder> there aren't droids you want. move on. move on.
[17:46:15] <KimK_laptop> s/just I'm/I'm just/
[18:25:54] <andypugh> cradek: If you are still there, what is the incatnation to get the Linuxcnc build-deps?
[18:27:07] <XXCoder> andypugh: got your login and sudo working?
[18:27:37] <andypugh> To an extent
[18:28:03] <andypugh> I can’t run gui synaptic as me, I can run apt-get
[18:28:46] <XXCoder> odd
[18:28:59] <XXCoder> wonder if there is seperate group for gui sudo
[18:29:28] <XXCoder> ahh
[18:29:30] <XXCoder> gksudo
[18:29:37] <andypugh> Why did we abandon Ubuntu? 90% of Linux Google searches take you to Ubu solutions
[18:29:56] <XXCoder> ubuntu added call home spyware
[18:30:07] <XXCoder> your local searches gets sent home
[18:30:20] <XXCoder> so they know about your.... collection. lol
[18:30:21] <malcom2073> Is that an ubuntu or a unity thing?
[18:30:24] <andypugh> gksudo isn’t the answer. If I select synaptic from the menu, it asks me for my password, then doesn’t open
[18:30:25] <malcom2073> Local searches are in unity
[18:30:28] <XXCoder> not too sure actually
[18:30:35] <XXCoder> andypugh: odd
[18:30:40] <malcom2073> I run ubuntu with gnome2
[18:30:49] <andypugh> Yeah, not super-happy with Linux this evening.
[18:30:49] <XXCoder> I use xfce mint
[18:31:07] <XXCoder> not too happy with mint but works fine and while ubuntu-based, is NOT ubuntu.
[18:31:24] <andypugh> For balance, I am equally unhappy with small patterns covered in red paint.
[18:31:31] <_methods> hahaha
[18:32:01] <andypugh> Time will tell if the little caliper recovers from the inadvertant re-paint
[18:32:52] <XXCoder> repaint?
[18:32:59] <XXCoder> you acciently painted your caliper
[18:33:01] <XXCoder> ?
[18:33:49] <andypugh> No, I accidentally dropped a part-painted pattern on it when the pattern fell off the screw I was holding it by
[18:35:30] <XXCoder> ow. hopefully its still as accurate
[18:39:25] <andypugh> Well, gksudo synaptic was certainly interesting.
[18:39:46] <andypugh> “andypugh@holbrook:~/linuxcnc-dev/src$ gksudo synaptic
[18:39:47] <andypugh> glibtop: Non-standard uts for running kernel:
[18:39:48] <andypugh> release 3.4-9-rtai-686-pae=3.4.0 gives version code 197632
[18:39:49] <andypugh> (gksudo:4929): GLib-CRITICAL **: g_str_has_prefix: assertion `str !=NULL' failed”
[18:39:50] <XXCoder> I find it a little odd
[18:40:12] <XXCoder> because I'm a sudo user and synaptic justs pops a password for sudo when I run it
[18:40:16] <XXCoder> no special action needed
[18:40:40] <andypugh> It does that for me. But then nothing happens
[18:41:34] <andypugh> It is my own fault, I am sure, for trying to find an easy way to make my UID match between systems
[18:42:37] <andypugh> Previously I have chamged UID then chown-ed every file on the HD to the new UID. This time I tried to create a new “me” with the right UID right at the beginning.
[18:42:53] <andypugh> That seems not to work
[18:45:11] <Praesmeodymium> isnt each uid unique depending on the machine? I mean its been a shitload of time since I looked at permission shit, but each machine has its own slat that added to a uid so even identical seeming uid's are different? or is this my y2k era knowledge just being out of date
[18:45:30] <XXCoder> I'm wondering why you need uids to be same?
[18:45:59] <andypugh> nfs
[18:53:21] <mozmck> andypugh: have you tried sshfs?
[19:16:49] <andypugh> mozmck: No
[19:16:54] <andypugh> Should i>
[19:16:55] <andypugh> ?
[19:17:14] <andypugh> I have even more trouble keeping my keys synched than keeping my UIDs synched
[19:17:37] <mozmck> It is pretty simple - I don't think you need keys synced.
[19:18:24] <mozmck> You just need sshd running on the "server" and then you mount directories with the user name and password of the user over there IIRC
[19:18:54] <mozmck> Gene mentioned on the ML about dumping nfs for sshfs recently I believe
[19:22:03] <andypugh> I can’t even really cope with the keyboard on the Linux machine (instead of a double-width back-delete, it had del-home ) My chances of dealing with sshfs seem slim
[19:22:44] <andypugh> have you any idea how infuriating it is to hit “home” when you wanted “backspace”?
[19:23:41] <SpeedEvil> #keymapmatters
[19:23:42] <mozmck> oh, yes - I've used several keyboards that I would have taken a sledge hammer to if they were mine :)
[19:23:53] <andypugh> In 39 years of playing with computers I have never wanted a “home” key, why is one taunting me now?
[19:24:49] <andypugh> Keys I don’t want: Home, caps-lock, scroll-lock….
[19:24:53] <mozmck> I use the home key often in text editing, web browsing, etc. but I sure like the keys to be in the right places.
[19:25:21] <mozmck> heh, several people at work remove the caps-lock key from their keyboards.
[19:25:34] <mozmck> I don't know what scroll-lock was ever for.
[19:25:54] <andypugh> Oh, another thing… I _never_ want backspace in a web browser to take me back to the previous page and lose my edits.
[19:26:38] <XXCoder> andypugh: re-assign keys
[19:27:03] <XXCoder> my apple keyboard dont have screenshot key so I changed key from f14 to screenprint
[19:28:16] <andypugh> XXCoder: Not on an Apple machine, I assume? In MacOS ctrl-alt-3 is scrren-grab and ctrl-alt-4 is window screen grab (saves to file on desktop, rather than clipboard)
[19:28:32] <XXCoder> yeah I just want one keypress lol
[19:28:50] <Jymmm> XXCoder: CMD+SHIFT+3, CMD+SHIFT+4
[19:29:02] <XXCoder> still not one key
[19:29:11] <Jymmm> Cause they do different things
[19:29:18] <andypugh> yeah, what he said, trying it. I don’t know what keys I press, I just press them
[19:30:15] <Jymmm> ALT+PRSC, CTRL+PRSC, SHIFT+PRSC all do differnt things too for win/nix
[19:30:34] <XXCoder> yeah
[19:30:35] <Jymmm> Ya'll need to unplug that fucking mouse and learn to use the kybd better =)
[19:30:44] <XXCoder> window, full screen and umm one other
[19:30:52] <XXCoder> my mouse isnt plugged in
[19:31:30] <XXCoder> Jymmm: I use keyboard shortcuts a lotl
[19:31:38] <XXCoder> probably because I started with dos days
[19:33:03] <Jymmm> Well, don't HAVE to, but you'll be more productive if you do/learn them and it's pretty universal across most OS/distros.
[19:35:00] <_methods> dos had keyboard shortcuts?
[19:37:53] <Jymmm> _methods: Yeah, CTRL+C (most of the time ;)
[19:37:59] <_methods> lol
[19:38:09] <_methods> asdf jkl;?
[19:38:18] <Jymmm> _methods: CTRL+ALT+DEL
[19:38:20] <_methods> qwerty
[19:38:25] <_methods> STFU Jymmm
[19:38:27] <_methods> hahahah
[19:39:37] <andypugh> I think that this time the answer is “No”
http://www.pastebin.ca/3263900
[19:40:01] <Jymmm> _methods: ...and CTRL+Z
[19:40:35] <Jymmm> andypugh: is that a ubuntu box?
[19:40:56] <andypugh> Debian
[19:41:12] <andypugh> I think that is the result of uninstalling one of Orage or ePdf !
[19:41:32] <Jymmm> andypugh: and what did you remove originally that caused issues?
[19:41:35] <_methods> hehe
[19:41:57] <_methods> he removed everything
[19:41:58] <andypugh> that’s apt-get autoremove
[19:42:19] <_methods> including his neighbors hedges
[19:42:49] <Jymmm> andypugh: I mean from a day agao or whenever this started?
[19:43:01] <XXCoder> _methods: no, but very keyboard oriented
[19:43:19] <andypugh> Well, I answered yes, as I was trying to make disk space, and thought that _if_I_didn’t_need_ such a big list (which I didn’t read in full) that would be good
[19:43:19] <XXCoder> and yes the 3 finger salute was common LOKL
[19:43:38] <_methods> keyboard oriented lol
[19:43:52] <andypugh> Jymmm: One of Orage ot ePDF
[19:44:56] <andypugh> I wass removing things a few at a time, and the ones before that autoremove were Orage and ePDF
[19:46:03] <andypugh> But as that list includes network-manager and lightdm answering “yes” is not a great plan. Don’t Ask Me How I Know.
[19:46:37] <Jymmm> wtf dies claendaring or pdf have to do with networking?!
[19:46:46] <XXCoder> welcome to linux
[19:46:57] <XXCoder> autoremove is broken sometimes.
[19:47:14] <_methods> it's very keyboard oriented
[19:47:28] <XXCoder> andypugh: can always install wicd lol but its been dead for while now.
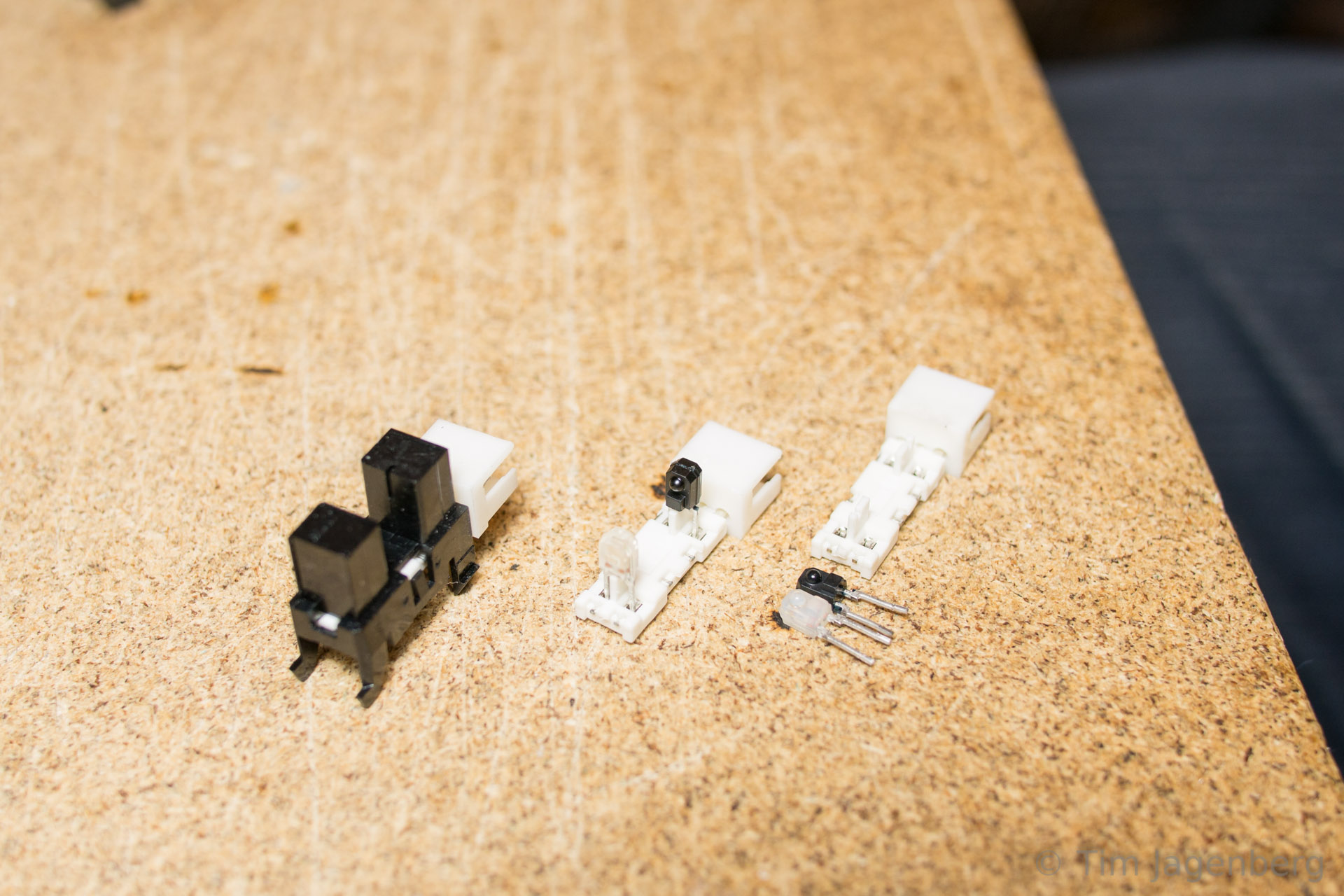
[19:50:32] <Barfious_Max> http://tim.jagenberg.info/files/2014/11/PTIM9372.jpg
[19:50:53] <Barfious_Max> i got a bunch of these optical sensors from a copy machine I took apart
[19:51:11] <_methods> makes great ied detonators
[19:51:13] <XXCoder> wonder if its sensive enough to make optical encoder out of lol
[19:51:22] <_methods> oops
[19:51:25] <_methods> wrong room
[19:51:28] <Barfious_Max> im wondering if I can cut a slotted wheel on my mill , and use them to , yes make an quadrature encoder
[19:51:50] <XXCoder> yeah it's not #terroristclub here _methods
[19:52:01] <_methods> very keyboard oriented room
[19:52:21] <XXCoder> I think I broke methods
[19:52:26] <Barfious_Max> _methods is new in town, give him a break, its not easy traveling all the way from syria
[19:52:45] <_methods> heheh
[19:52:50] <XXCoder> heh
[19:52:52] <XXCoder> anyway
[19:53:03] <XXCoder> Barfious_Max: hmm
[19:53:05] <Barfious_Max> ok so these sensors they have three leads
[19:53:10] <XXCoder> 4 sensors means 4 bits
[19:53:25] <XXCoder> 2^4 = 16 positions
[19:53:39] <Barfious_Max> looking at the bottom of it, I can see they wired , i believe the grounds together
[19:53:52] <Tom_itx> tgif
[19:53:55] <Barfious_Max> it it possible that they could be wired directly to a parport?
[19:53:56] <XXCoder> can't fit 5th one in?
[19:54:58] <Barfious_Max> i have a whole pile of these sensors, i don't care how many i use, just trying to determine possibilities for a cheap, hack toegether machine
[19:55:10] <XXCoder> heh do a 32 bit
[19:55:13] <XXCoder> kidding
[19:55:16] <andypugh> Barfious_Max: No, you need LED current too
[19:55:46] <Barfious_Max> andypugh: you mean the right current level so they don't get burned out
[19:55:52] <Barfious_Max> like it might need a resistor
[19:55:57] <andypugh> But with the right power and pull-ups, you can make an encoder out of them, or limit switchs
[19:56:01] <XXCoder> I wonder how many bits of encoder would be enough to get .000001" resolution
[19:57:01] <andypugh> XXCoder:
https://en.wikipedia.org/wiki/Gray_code#Single-track_Gray_code
[19:57:16] <Barfious_Max> im probably not going to go crazy and use the whole pile on one encoder
[19:57:25] <andypugh> DIY 7-bit impementation:
http://www.quirkfactory.com/robotics/single-encoder/
[19:57:33] <XXCoder> comeon you need atomic resolution LOL
[19:58:22] <Barfious_Max> probably want to start off with just a really simple encoder
[19:58:39] <andypugh> XXCoder: the problem with 0.000001” resolution is that you need 0.00001” slots, and that might be quite a large diameter unless you can manage atom-scale slots
[19:58:55] <Barfious_Max> i got this whole idea from
https://www.youtube.com/watch?v=PQ1FBcQT0AI
[19:59:33] <Barfious_Max> and was wondering if instead of with an arduino if I could wire directly to the parport, or with some minor electronics between the sensors
[19:59:48] <Barfious_Max> so basically, skip the arduino
[20:00:01] <XXCoder> andypugh: really? I thought it only needs whatever diameter divided by number of bits
[20:00:15] <XXCoder> er total possible positions I mean
[20:00:50] <XXCoder> meaning if 4 bit, slot would be circle length/16
[20:01:09] <XXCoder> so basically D2(PI)/16 = D(PI)/8
[20:01:28] <Barfious_Max> andypugh: yes this link looks even more complicated than Im likely trying to do
[20:03:16] <XXCoder> Barfious_Max: odd thing though
[20:03:27] <XXCoder> leds by themselves act as optical sensor too
[20:03:39] <XXCoder> wow that video is captioned!
[20:03:43] <XXCoder> tech ones rarely are.
[20:03:54] <Barfious_Max> thick german accent
[20:04:01] <Barfious_Max> is my guess why
[20:04:10] <Barfious_Max> he makes great stuff
[20:04:12] <XXCoder> well thanks, accent of person! LOL
[20:04:32] <Barfious_Max> don't get me wrong, i love his accent
[20:04:46] <andypugh> XXCoder: Yes. Exactly that, and you were talking about dividing your diameter into 129533678756.47668393782383 slots
[20:04:56] <Barfious_Max> a thick german accent is a sure sign of technocal accuracy in my book
[20:05:12] <XXCoder> I dont really care about accents because me deef man :P
[20:05:24] <Tom_itx> Barfious_Max or a good coverup story
[20:05:39] <Tom_itx> just ask VW
[20:05:42] <Barfious_Max> i don't mind his accent because he is in the master race
[20:05:46] <_methods> hahahhahahhaha
[20:06:00] <Barfious_Max> take your pick
[20:06:10] <_methods> german social engineering
[20:06:56] <_methods> fuckyounugen
[20:07:18] <Barfious_Max> I left him a comment encouraging him not to improve his english , lest he will get fat and lazy
[20:07:36] <_methods> don't forget the guns
[20:07:39] <_methods> and bacon
[20:07:41] <_methods> and eagles
[20:07:49] <_methods> fat and lazy are just the good part
[20:08:10] <Barfious_Max> well that can only help france
[20:08:27] <XXCoder> http://www.instructables.com/id/LEDs-as-light-sensors/
[20:08:35] <XXCoder> if you guys are curious about using leds as sensor
[20:08:47] <Barfious_Max> god damnit can I ever come in here and not naturally have it move closer and closer to an inevitable political conversation
[20:08:51] <Barfious_Max> ENCODERS!!
[20:08:58] <Barfious_Max> how does they work.
[20:09:25] <XXCoder> theres few types actually
[20:09:27] <Barfious_Max> please do not call attention to the bacon pepperoni pizza sitting in my bed with me at this very moment.
[20:09:38] <XXCoder> one that only has one track and computer keeps track
[20:09:51] <gonzo_nb> some radio hams in the uk have been playing with visible light comms. And use LEDs as both illumination and detectors
[20:09:51] <Barfious_Max> i know . but lets try to bring this down to something i might actually accomplish
[20:10:00] <XXCoder> and absoute encoder that uses a sensor per track, more encoder bits the more accurater
[20:10:12] <XXCoder> that r is a funny typo
[20:10:12] <Barfious_Max> so I cut out a slotted circle, divided by 16
[20:10:42] <XXCoder> absolute encoder is actually easier to do without adding something like raspberry pi I would think.
[20:11:18] <Barfious_Max> XXCoder, your suggesting I cannot wire it directly to the parport? this is what I'm trying to figure out
[20:11:27] <XXCoder> not suggesting actually
[20:11:34] <Barfious_Max> stating
[20:11:46] <XXCoder> no, just thinking stuff out lol
[20:12:30] <Barfious_Max> I'm fine with making a sketch on an arduino and doing that , i was just wondering how its normally done with a quadrature encoder
[20:12:58] <Barfious_Max> if those wire directly to the parport, or if there is more circuitry involved
[20:13:04] <XXCoder> I do understand basics of encoder but how its output is used dunno
[20:13:57] <andypugh> Barfious_Max: Just wire directly, LinuxCNC has a module to convert the quadrature to numbers
[20:14:50] <gonzo_nb> a simple quadratude decoder is just a D type latch
[20:15:11] <Barfious_Max> andypugh, ok so since the optical sensor has a diode in it, I presume I add a resistor to it so I don't destroy a parport pin?
[20:15:37] <PetefromTn_> YO
[20:15:40] <Barfious_Max> like i would with an led on an arduino?
[20:15:54] <Tom_itx> Barfious_Max yes pretty much
[20:16:00] <andypugh> 5V - 1k resistor - LED - Gnd on the LED side
[20:16:04] <Barfious_Max> googleing d type latch
[20:16:07] <XXCoder> hey the pete
[20:16:08] <Praesmeodymium> is there a decent source of qudrature strips? like say I want to make a reprap smarter and closed loop rather than just assuming the stepper got it where it says it did
[20:16:39] <Tom_itx> Praesmeodymium i bet US digital has them
[20:16:52] <Tom_itx> or an old printer
[20:16:52] <andypugh> Barfious_Max: Don’t bother looking up the D-type now, it’s not relevant to your physical wiring question
[20:16:54] <Tom_itx> or 3
[20:17:06] <XXCoder> I love the pattern.
https://upload.wikimedia.org/wikipedia/commons/a/a8/Gray_code_rotary_encoder_13-track_opened.jpg
[20:17:46] <Barfious_Max> praesmeodymium: i saw a closed loop 3d printer on youtube, where the guy was pushing it off track and it was snapping back into place
[20:18:12] <XXCoder> https://code.google.com/p/wheel-encoder-generator/
[20:18:13] <Praesmeodymium> yeah that was using proper servos and encoders
[20:18:17] <Barfious_Max> having taken this copy machine apart, man so much stuff came out of it
[20:18:37] <XXCoder> you can make a cnc machine out of copy machine
[20:18:44] <Barfious_Max> yeah basically
[20:18:51] <XXCoder> maybe few stuff needed past it
[20:18:55] <Barfious_Max> i mean three nema 17's
[20:19:01] <Barfious_Max> two nema 23's
[20:19:08] <XXCoder> hell someone made a cnc out of 3 floppy disk drives
[20:19:11] <Barfious_Max> these bigger dc motors with build in controllers
[20:19:24] <Barfious_Max> a whole assortment of smaller dc motors with gears and encoders
[20:19:36] <Barfious_Max> tons of gears and ground rods
[20:19:40] <andypugh> Barfious_Max: You need to know what the output device on the Opto is. There are rather a lot of options, unfortunately.
[20:19:46] <Praesmeodymium> you can buy laser etchers fron china made of dvd/cd drive trays
[20:20:02] <Praesmeodymium> so high quality used parts lol
[20:20:35] <Barfious_Max> i know im probably up for making a laser cutter with these parts
[20:20:48] <XXCoder> nice!
http://www.dgkelectronics.com/inkscape-extension-for-creating-optical-rotary-encoder-discs/
[20:20:52] <XXCoder> inkscape generator!
[20:21:02] <Barfious_Max> idk , the bigger motors might make for a plasma cutter but don't know if they have enough torque
[20:21:55] <Barfious_Max> andypugh: you mean to know what type of diode?
[20:23:03] <Barfious_Max> If I can get the bigger steppers to push a larger gantry I'll do plasma cutter, otherwise, laser cutter and pcb mill
[20:23:08] <andypugh> it’s more than that, look at this web-page then select the “output device” filter:
http://uk.rs-online.com/web/c/displays-optoelectronics/optocouplers-photodetectors-photointerrupters/slotted-optical-switches/
[20:24:17] <Barfious_Max> there are some numbers on the side of the thing
[20:24:33] <andypugh> That might help
[20:25:28] <Barfious_Max> 451 on the one with the diode symbol , SG on the presumably the sensor
[20:26:28] <Barfious_Max> trying to determine how much energy to put into it and how much to expect to come back? or is linux cnc configured in a particular way for particular optical encoders?
[20:27:42] <Barfious_Max> i bet if I powered some of the stepper boards that were salvaged from the copy machine I could measure them
[20:29:16] <Barfious_Max> the inkscape extension looks cool , i wouldn't know how I might go about printing it onto something clear..
[20:29:46] <ChuangTzu_> overhead transparencies
[20:30:12] <XXCoder> yeah just buy projector sheets compitable with your printer
[20:30:25] <andypugh> Barfious_Max: try 3mA through the LED. The detector won’t supply power, it will just conduct differentlt
[20:30:37] <Barfious_Max> sticking it onto some plexiglass and then milling out a circle?
[20:32:29] <Barfious_Max> humm i imagine by the time you do the transparencies and plexiglass you might as well buy some cheap premade ones
[20:32:41] <XXCoder> hmm
[20:32:52] <Barfious_Max> back to thinking jsimple cutout one
[20:32:55] <XXCoder> get a old cd and mill out silver?
[20:33:35] <andypugh> I have made a few encoders, sometimes it makes sense.
[20:33:39] <Barfious_Max> yeah , the german didn't explain exactly how he did that , i presume he used like an xacto knive to scrape off the top layer
[20:33:51] <XXCoder> yeah
[20:33:55] <XXCoder> maybe
[20:34:20] <Barfious_Max> i mean , even if its not perfectly transparent , i suppose milling it off would work
[20:35:08] <andypugh> briefly, here is one of them:
https://youtu.be/ZhICrb0Tbn4?t=20s
[20:35:50] <XXCoder> other way would be brightly lit, but sheet is black and white
[20:36:05] <XXCoder> so it would detect difference of refection from black parts and white
[20:36:14] <XXCoder> that way you could just literally print and cut paper
[20:37:01] <XXCoder> thats where using leds as light sensors come in but probably less effective dunno
[20:37:06] <Barfious_Max> just cutting a bit of metal looks alot more comfortable
[20:38:24] <Barfious_Max> hell the metal can certainly come from the scrap from the copy machine
[20:38:36] <XXCoder> http://www.geology.smu.edu/dpa-www/robo/Encoder/pitt_html/encoders.html
[20:40:59] <Barfious_Max> how did you plan that encoder on your mill? did you do it with an indexer or design it in CAD?
[20:42:32] <andypugh> I think I just wrote G-code
[20:42:57] <andypugh> I already had an A-axis
[20:43:22] <andypugh> (not the one in the video as is happens)
[20:43:58] <XXCoder> man renesis you ok? you broke your pipe ;)
[20:45:05] <renesis> i was confused for a second because i havent used a pipe in quite awhile but im guessing it has something to do with a quit message
[20:45:18] <XXCoder> yeah
[20:45:43] <renesis> yeah both pipes currently in rotation seem to be intact
[21:51:28] <Barfious_Max> are h-bridges dc only?
[21:51:41] <Barfious_Max> or , typically used only for dc motors?
[22:38:30] <renesis> barfious_max: they can be used to drive dc motors in forward and reverse, and they can drive brushless AC motors
[22:38:39] <Tom_itx> mmm first snow maybe tomorrow
[23:42:47] <jesseg> Barfious_Max, one H-Bridge can drive a DC brush type motor in either direction. Two or 3 H-Bridges (Usually 3) are used to drive brushless DC and AC motors
[23:43:32] <jesseg> Actually, usually 3 half-bridges are used for 3 phase things like brushless DC motors and AC induction motors
[23:44:42] <jesseg> However, two H-Bridges are also used to drive a stepper motor.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}