Back
[02:09:23] <Deejay> moin
[06:02:08] <automata_> I would like to send discrete data from a userspace HAL component to another rt HAL component
[06:02:16] <automata_> something like hal streamer
[06:45:48] <automata_> in file streamer.c, in function update the fifo is accessed without any memory locking arrangements in place
[06:47:10] <automata_> simuillarly in streamer_usr.c, in the main function, the fifo is accessed without any semaphore or mutex locking
[06:48:18] <automata_> Could this mean that the fifo (located in shared memory) is accessed by multiple threads which could lead to reading wrong data?
[06:50:10] <archivist> is it done by controlling the connections, eg dont let more than one connect to an input etc
[06:53:11] <automata_> controlling the connections, would imply that we restrict the number of fifo writers and readers
[06:53:33] <automata_> but I believe there could be contrntion between one reader and one writer too
[06:53:50] <automata_> *contention
[06:58:14] <archivist> if the reader is in rt and the writer is in userspace then one is interrupting the other, stopping nearly all possible contention
[06:59:27] <automata_> oh ok
[06:59:59] <archivist> that is how I see it anyway (without looking at any code)
[07:00:44] <automata_> rtapi provides rtapi_fifos... can those be used?
[07:00:51] <automata_> they seem to be thread safe
[07:01:17] <archivist> I bet the userspace cant
[07:02:17] <automata_> the RTAPI fifo example shows how to access the fifo from userspace too
[08:52:20] <Bushman> hi guys
[09:34:32] <SpeedEvil> hi
[10:01:38] <Bushman> did anyone tried to run linuxCNC in a VM?
[10:01:54] <Bushman> instead of simulator build for example?
[10:02:09] <cradek> of course you can't control machinery that way
[10:02:30] <cradek> so there is no benefit to using a realtime kernel
[10:02:36] <cradek> let's back up. why do you want to do that?
[10:03:23] <Bushman> i'm installing linuxCNC in simulator mode on debian right now.
[10:03:48] <Bushman> some of the default libs get in conflict with what linuxcnc wants...
[10:04:12] <Bushman> i was just wondering if it wouldn't be easier to me just run the ISO in VM and forget :P
[10:05:55] <cradek> maybe; if you do that you'll still want a sim build inside the vm
[10:06:03] <Bushman> i used to have it installed on ubuntu 14 but i've migrated to vanilla debian recently. i'm reinstalling stuff and linuxcnc just happened to be next ;]
[10:06:38] <Bushman> well, there's no sim ISOs out there, right?
[10:06:55] <Bushman> so if i still need to rebuild it then there's no point i guess
[10:07:00] <cradek> nope
[10:07:08] <cradek> we have sim builds in our apt repo
[10:07:16] <cradek> for wheezy and others
[10:07:19] <Bushman> hmm...
[10:07:46] <Bushman> i run jessie
[10:07:59] <cradek> we don't build for jessie yet but probably will some day
[10:08:12] <cradek> I'm very surprised you're having trouble building sim on jessie
[10:08:33] <Bushman> heh, more like being lazy XD
[10:08:46] <cradek> bbl
[10:08:49] <Bushman> the conflicting libs will be removed
[10:08:54] <Bushman> ok c'ya
[10:11:42] <Bushman> not a problem i guess but that's what i get when trying to meet the dependencies:
[10:11:45] <Bushman> The following packages have unmet dependencies: libgl1-mesa-dev : Conflicts: libgl-dev
[10:12:04] <Bushman> i will remove the conflicting package and install the required one.
[10:12:46] <Bushman> ... manually, later, when all the other 1,2Gb of stuff finishes installing ;]
[10:14:12] <Bushman> hmm...
[10:14:39] <Bushman> i guess i could just install vanilla Ubuntu 10 on VM and then install sim from repos.
[10:14:59] <Bushman> no real time kernel and no issues with dependencies
[10:15:21] * Bushman investigates futher.
[10:15:39] <Bushman> *further
[10:16:29] <ssi> hi
[10:17:48] <alex4nder> Bushman: I just built linuxcnc on top of jessie,. everything worked out of the box
[10:18:41] <Bushman> alex4nder: i'm doing it with this instructions:
http://wiki.linuxcnc.org/cgi-bin/wiki.pl?Build_A_Simulator_Manually
[10:18:52] <Bushman> good? bad?
[10:19:41] <alex4nder> Bushman: looks about right
[10:19:45] <cradek> you can't resolve the deps that way until we support jessie
[10:20:10] <Bushman> um... what?
[10:20:33] <cradek> dpkg-checkbuilddeps won't give you the right answers
[10:20:44] <Bushman> oh
[10:20:49] <cradek> don't do that part
[10:20:54] <furkanyilmaz11> Hi everybody thats Furkan. I am an Mach3 user but I want to try linuxcnc. Because there are so much bugs. And I dont wanna pay more to windows and artsoft. Is there an anybody have a robotic experience with linuxcnc?
[10:21:02] <Bushman> well shit. i'm already doing it :D
[10:21:13] <cradek> run configure and if it complains, resolve it manually
[10:21:53] <furkanyilmaz11> I mean there are so much bugs at mach3
[10:21:59] <cradek> furkanyilmaz11: linuxcnc controls many kinds of robots. do you have a more specific question?
[10:22:09] <furkanyilmaz11> Sure!
[10:22:15] <furkanyilmaz11> I want to control delta robot
[10:22:32] <cradek> rotary or linear?
[10:22:37] <furkanyilmaz11> rotary
[10:23:22] <furkanyilmaz11> I tried to control it with arduino but i think arduino is not good enough to control endustrial servos
[10:23:52] <cradek> we have kinematics for that. controlling a kins robot is a very advanced setup. I hope you are open to spending time learning and trying.
[10:24:49] <furkanyilmaz11> Sure I spend so much time and I am ready to spend more.
[10:25:03] <ssi> I have a linear delta on my desk that I want to get back around to running with linuxcnc
[10:25:07] <ssi> too many projects, not enough time
[10:26:10] <furkanyilmaz11> Same problem here, and I spend so much money for this projects. And I really need to finish it right now.
[10:26:48] <furkanyilmaz11> Is there an anybody to help me for the configure my delta with linuxcnc?
[10:27:17] <archivist> ask specific questions rather than asking for a "person"
[10:27:43] <furkanyilmaz11> Ok I am sorry
[10:28:30] <furkanyilmaz11> I have no idea about how to configure it. How can I use the linuxcnc's kinematics?
[10:29:14] <archivist> eg
http://linuxcnc.org/docs/2.5/html/man/man9/kins.9.html
[10:31:24] <Bushman> damn... i didn't expect that kind of trouble:
[10:31:36] <Bushman> checking for libudev... configure: error: libudev-dev not found
[10:31:38] <Bushman> but...
[10:31:50] <Bushman> libudev-dev is already the newest version.
[10:31:58] * Bushman is confused
[10:32:00] <Bushman> o_O
[10:34:06] <ssi> furkanyilmaz11: you'd probably be better off spending some time learning linuxcnc on a cartesian machine
[10:34:28] <ssi> there's a ton to learn, and having to learn the basics of linuxcnc AND learn a wacky kinematics at the same time is a lot to digest
[10:34:51] <archivist> in at the deep end
[10:34:53] <ssi> yep
[10:36:06] <archivist> I think going for the thing you want having knowledge of the machine is the right way, a standard machine may confuse
[10:36:23] <furkanyilmaz11> I can configure linuxcnc for a cartesian cnc machine. Its easy to make. Just setup the puls and dir pins, put some optocouplers for lpt port and setup etc...
[10:36:36] <furkanyilmaz11> But there are some codes about the kinematics for linuxcnc
[10:36:41] <zeeshan> im assuming youd wanna use tripodkins? :)
[10:36:45] <zeeshan> cause its a delta bot
[10:37:02] <furkanyilmaz11> yes
[10:37:06] <ssi> ZEE
[10:37:08] <zeeshan> hi
[10:37:18] <ssi> zeeshan:
http://www.prototechnical.com/~imcmahon/invribbon.png
[10:37:25] <zeeshan> is that you
[10:37:26] <zeeshan> lol
[10:37:28] <zeeshan> hahaha
[10:37:29] <ssi> no
[10:37:34] <ssi> I'm holding the pole
[10:37:39] <zeeshan> lol
[10:37:58] <furkanyilmaz11> But I dont know how to upload the codes to linuxcnc?
[10:38:01] <ssi> video:
https://app.box.com/s/z44n2t0akrgybc9es9rd0jg3d9ckx8ar
[10:38:05] <furkanyilmaz11> nice pic ssi :)
[10:38:08] <ssi> thx :D
[10:38:46] <archivist> furkanyilmaz11, you need to read the integrators part of the manual, eg how to connect pins in hal
[10:39:01] <zeeshan> http://www.imac.unavarra.es/~cnc/GIT/emc2-dev/src/emc/kinematics/tripodkins.c
[10:39:12] <zeeshan> describes its workings pretty well
[10:39:23] <zeeshan> ssi that is intense
[10:39:26] <furkanyilmaz11> Ok I am gonna start to read from hal
[10:39:33] <ssi> zeeshan: srs bzns
[10:39:41] <alex4nder> Bushman: my built with libudev-dev:amd64 - 215-17
[10:39:46] <alex4nder> s/my/mine/
[10:39:55] <ssi> I don't think tripodkins will work for a rotary delta
[10:40:02] <ssi> it says it wants the joints to be strut lengths
[10:40:15] <Bushman> alex4nder: that's good. now why mine doesn't? :D
[10:40:46] <alex4nder> Bushman: it might be something unrelated; what's in the config.log?
[10:40:56] <Bushman> let me see
[10:41:11] <ssi> zeeshan: did I tell you about the edx.org autonomous navigation for flying robots course?
[10:41:21] <zeeshan> nope
[10:41:26] <ssi> it's pretty good so far
[10:41:37] <Bushman> alex4nder: configure:2610: error: libudev-dev not found
[10:41:52] <Bushman> configure: exit 127
[10:42:00] <ssi> going over linear algebra/3d geometry for coordinate system affine transformations, etc
[10:42:06] <ssi> kinematics,
[10:42:22] <ssi> sensors for feedback, brushless motor control schemes
[10:42:25] <ssi> all sorts of goodies
[10:42:27] <alex4nder> Bushman: just look at the code above that line.. you should be able to test those pkg-configs by hand
[10:42:43] <zeeshan> i love the transformation matrices
[10:42:44] <ssi> inertial navigation based on accelerometers and gyros with kalman filters
[10:43:01] <ssi> yea me too
[10:43:13] <SpeedEvil> I hope magnetometers too
[10:43:22] <ssi> they talk a bit about quaternions too
[10:43:24] <ssi> but not much in depth
[10:43:28] <Bushman> alex4nder: um... how do i do that? :|
[10:43:53] <ssi> SpeedEvil: they haven't talked about magnetometers in this particular course thus far because they're using world markers for orientation
[10:43:56] <zeeshan> never heard of that
[10:44:07] <ssi> but real IMU/INS needs magnetometers for heading drift correction
[10:44:18] <alex4nder> Bushman: get a text editor, and edit configure, and then go to line 2610,.. and see if you can determine the error by running the code it's using
[10:44:20] <SpeedEvil> Or in some cases, GPS can be good enough
[10:44:23] <alex4nder> in this case some pkg-configs
[10:44:50] <ssi> SpeedEvil: gps is good for position correction, but not for heading (ie attitude) correction
[10:45:20] <ssi> zeeshan: a quaternion is a four-term representation of a rotation/translation
[10:45:30] <Bushman> alex4nder: i see
[10:45:36] <ssi> the matrix requires like eleven distinct terms
[10:45:46] <ssi> http://en.wikipedia.org/wiki/Quaternion
[10:46:11] <ssi> they're talking about feedback/control/PID now in the course
[10:46:47] <Timbo> not sure how you'd use a quaternion to represent a translation?
[10:46:55] <ssi> might be just rotation
[10:47:06] <Timbo> it is only rotation
[10:47:08] <zeeshan> honestly
[10:47:12] <Timbo> unless I'm very much mistaken
[10:47:15] <zeeshan> ive only used a rotation matrixc.
[10:47:30] <zeeshan> to rotate stuff, never used a quaternion
[10:47:35] <zeeshan> first time im hearing about it :P
[10:47:43] <ssi> yeah I haven't USED quaternions, I'm just aware of their existence :)
[10:47:48] <Timbo> aha
[10:47:52] <ssi> http://en.wikipedia.org/wiki/Quaternions_and_spatial_rotation
[10:48:00] <furkanyilmaz11> I have a specific question right now :D. Can I control the linuxcnc axises from my image processing software to tell a object's position and what it should do. So I dont want to upload g-code and run it. I want to control axises from my image processing software real time. Is it possible?
[10:48:02] <zeeshan> what makes them better than a good ol rotation matrix
[10:48:05] <Bushman> alex4nder: hahaha, i had no "pkg-config" XD
[10:48:06] <Timbo> best thing about quaternions is being able to interpolate between them
[10:48:12] <Timbo> so called slerping
[10:48:36] <alex4nder> Bushman: : |
[10:48:46] <Bushman> what? :D
[10:48:48] <ssi> also they're a more compact representation, so they're more memory and bandwidth efficient
[10:49:04] <ssi> and they don't have singularities like euler angles do
[10:49:04] <alex4nder> Bushman: yah,. that's pretty important
[10:49:08] <Bushman> i didn't knew i need it and the error was not telling me that.
[10:49:38] <Bushman> i think i'll start taking notes and maybe add that to the wiki?
[10:49:52] <Bushman> for Debian 8 (jessie)
[10:50:08] <Bushman> all i see there are only ubuntus
[10:50:36] <ssi> Timbo: reading about slerping, very nice
[10:50:42] <ssi> spherical linear interpolation
[10:51:01] <zeeshan> Quaternions also avoid a phenomenon called gimbal lock which can result when, for example in pitch/yaw/roll rotational systems, the pitch is rotated 90° up or down, so that yaw and roll then correspond to the same motion, and a degree of freedom of rotation is lost. In a gimbal-based aerospace inertial navigation system, for instance, this could have disastrous results if the aircraft is in a stee
[10:51:02] <zeeshan> LOL
[10:51:05] <zeeshan> nice
[10:51:11] <ssi> that would actually be really useful for a constant rate attitude change from x to y
[10:51:29] <archivist> furkanyilmaz11, some people have done pick and place using linuxcnc, others have tried opencv, if anyone has merged the work and published, I dont know of it
[10:51:47] <ssi> zeeshan: gimbal lock was a real physical problem for the apollo IMU
[10:52:00] <SpeedEvil> opencv+openpilot - for really big pick and place machines.
[10:52:17] <ssi> SpeedEvil: :)
[10:52:43] <zeeshan> if (yaw = 90 && pitch == 90 || roll == 90) { set yaw 90.001 }
[10:52:44] <zeeshan> done
[10:52:49] <zeeshan> :D
[10:53:02] <ssi> lol
[10:53:05] <zeeshan> hax
[10:53:43] <Bushman> ... and instead to the moon, fly to mars XD
[10:53:44] <SpeedEvil> zeeshan: now that sticks your gimbal, and it can wobble
[10:53:50] <SpeedEvil> err - accumulate error, rather
[10:53:53] <zeeshan> write another iff statement
[10:54:00] <zeeshan> x time later
[10:54:00] <ssi> zeeshan: cool story, except
http://www.angelfire.com/moon2/xpascal/MoonHoax/ProgressReport/ApolloIMU.jpg
[10:54:02] <zeeshan> :D
[10:54:04] <ssi> it's a physical gimbal :D
[10:54:56] <zeeshan> thats a "full gimbal?"
[10:55:01] <zeeshan> so it allows roll pitch yaw
[10:55:04] <ssi> yep
[10:55:05] <zeeshan> nice
[10:55:11] <ssi> https://courses.edx.org/courses/course-v1:TUMx+AUTONAVx+2T2015/info
[10:55:14] <ssi> gogogo
[10:55:18] <ssi> it's in week 4 but catch up
[10:55:23] <ssi> it's easy enough for a nerd like you
[10:55:27] <zeeshan> FREE?
[10:55:29] <zeeshan> :]
[10:55:31] <ssi> of course
[10:55:36] <ssi> I don't pay for anything
[10:55:37] <ssi> heh
[10:56:07] <zeeshan> i dont get that apollo thing
[10:56:11] <zeeshan> you have motors outside of the rins?
[10:56:15] <zeeshan> http://en.wikipedia.org/wiki/Gimbal#/media/File:Gimbal_3_axes_rotation.gif
[10:56:23] <zeeshan> like the pin thing has a motor
[10:56:29] <zeeshan> then there is a motor on the blue thing
[10:56:35] <zeeshan> or green
[10:56:38] <zeeshan> and one on red
[10:56:41] <zeeshan> (pink. not red)
[10:57:20] <ssi> no you have gyroscopes in three planes
[10:57:30] <ssi> and the gyros ane gimbaled so the aircraft can rotate around it
[10:57:35] <ssi> the gyros want to stay in plane
[10:57:46] <ssi> the gimbals have resolvers or something to measure the rotation of the gimbal about the gyro
[10:57:54] <ssi> that gives you measurements of three euler angles
[10:58:12] <ssi> gimbal lock is a problem because you get ambiguities of rotation measurement
[10:58:30] <ssi> and if you get all the gimbals aligned, then you have no degree of freedom in other planes
[10:58:36] <ssi> or about other axes rather
[10:58:41] <ssi> that's physical gimbal lock
[10:58:59] <ssi> mathematical gimbal lock is just the ambiguity/degeneracy of the representation
[11:00:50] * zeeshan needs to build one
[11:00:52] <zeeshan> looks interesting
[11:01:01] <zeeshan> dont give me more projects right now
[11:01:02] <ssi> physical gyro IMUs are antiquated now
[11:01:06] <ssi> now that MEMS exists
[11:01:28] <zeeshan> youre talking about those tiny ones
[11:01:32] <ssi> solid state ones
[11:01:33] <zeeshan> used in acceleromters?
[11:01:52] <ssi> there are MEMS accelerometers and MEMS gyros
[11:02:07] <ssi> you can buy a 6dof or 9dof IMU for $100 or less now
[11:02:15] <ssi> I had a 9dof one but I guess I lost it in the fire :(
[11:02:35] <zeeshan> 9 dof? :D
[11:02:42] <zeeshan> X Y Z A B C
[11:02:43] <zeeshan> what else
[11:02:53] <ssi> magnetometer
[11:03:11] <ssi> https://www.sparkfun.com/products/10736
[11:03:12] <zeeshan> f magnetometer
[11:03:36] <zeeshan> i was watching an episode of mayday where they crashed a plane in resolute nunavut
[11:04:04] <zeeshan> cause they didnt sync their gps w/ their heading indicator which apparently works by locating the magnetic north pole
[11:04:18] <zeeshan> since they were so close to the magnetic north pole, there was huge variation between the two instruments
[11:04:39] <zeeshan> they crashed into a mountain like 3 km in parallel w/ the airport landing strip thinking they were landing on the run way
[11:04:43] <zeeshan> (really heavy fog)
[11:05:06] <zeeshan> 3 people survived an airplane crashing into a mountain at 180 kph
[11:05:11] <zeeshan> not sure how that happened..
[11:05:35] <ssi> there's more to that story than the heading error
[11:05:41] <zeeshan> yes
[11:05:46] <ssi> how long ago was it?
[11:05:50] <zeeshan> the copilot knew what was going on
[11:06:07] <zeeshan> but the retard captain had his head shoved up his ass
[11:06:13] <zeeshan> because he was too proud to listen to anyone else
[11:06:27] <zeeshan> the copilot gave him like 15-16 attempts to correct
[11:06:30] <zeeshan> but captain ignored
[11:06:52] <zeeshan> 2011
[11:06:55] <zeeshan> http://en.wikipedia.org/wiki/First_Air_Flight_6560
[11:07:22] <zeeshan> i think its incredible that transportation safety board of canada was going for training on that same day
[11:07:29] <zeeshan> they arrived like 3 hours after the accident happened
[11:07:29] <zeeshan> lol
[11:07:32] <zeeshan> or 1 hour
[11:07:34] <zeeshan> i forget
[11:07:46] <ssi> The conclusion of the investigation was that the aircraft missed the runway centerline signal during the autopilot-managed turn to final approach, but an inadvertent movement of the control column caused the autopilot to switch modes. As a result, the autopilot did not continue turning to re-intercept the ILS signal and instead leveled out. Due to being oversaturated with work in preparing to land, neither pilot noticed the change in the autopilot mode
[11:08:36] <zeeshan> thats not 100%
[11:08:43] <zeeshan> they are belitting the copilot in that conclusion
[11:08:49] <ssi> The aircraft had a malfunctioning compass providing incorrect readings to the flight instruments (although the onboard GPS and ILS were providing correct information), causing the pilot to believe the aircraft was flying more toward the west and would cross the runway centerline again and re-acquire the signal. In fact the aircraft was flying roughly parallel to the runway and a wind from the southwest was pushing it even further to the east.
[11:08:50] <zeeshan> someone didn't quote that right
[11:08:55] <ssi> The first officer raised the issue of an incorrect heading and suggested a go-around multiple times, but the captain ignored his suggestions. An attempt to make a go-around was initiated when the ground proximity alarm sounded, but there was insufficient time to gain enough altitude before impact.
[11:09:01] <zeeshan> the copilot had a good feeling something was wrong
[11:09:07] <zeeshan> listen to the cockpit voice recorder
[11:09:12] <Bushman> well this is going to be fun.
[11:09:19] <zeeshan> he questions the captain like 15 times
[11:09:20] <zeeshan> :P
[11:09:25] <ssi> oh btw we got some more info on the 'toga crash last weekend in atlanta
[11:09:27] <zeeshan> nm :P
[11:09:34] <ssi> it wasn't a misfueling accident like I thought
[11:09:59] <ssi> turns out the engine had a known problem... the owner had asked for help with it, and his CFI had refused to fly it and told him to get it fixed
[11:10:01] <Bushman> alex4nder: installing without checking for dependencies was a mistake.
[11:10:11] <Bushman> i mean trying to configure
[11:10:16] <ssi> guy ignored that and flew it down here, took on full fuel and his family, and was overloaded for the power available
[11:10:21] <ssi> couldn't climb out of ground effect
[11:10:26] <ssi> 100% pilot error
[11:10:35] <Bushman> the failing command is:
[11:10:42] <Bushman> pkg-config glib-2.0 >/dev/null 2>&1
[11:11:08] <Bushman> that should return 1 for the configuration to continue.
[11:11:16] <Bushman> it doesn't return anything
[11:11:26] <DaPeace> hey guys, short question. i use a 3-axis-tb6600-controller with 24V. do i see it right that i could run higher rapid-speeds if i raise the voltage to 40V?
[11:11:49] <zeeshan> ssi damn pilot errors!
[11:11:56] <zeeshan> this is why i dont fly!!!
[11:11:59] <zeeshan> and maintenance errors
[11:12:06] <zeeshan> RARELY is it a pure mechanical failure
[11:12:10] <ssi> agreed
[11:12:14] <zeeshan> in at least all the mayday episodes ive seen
[11:12:14] <zeeshan> haha
[11:12:34] <Bushman> DaPeace: is it designed to handle 40V?
[11:12:39] <alex4nder> Bushman: are you talking about the configure line .. if pkg-config glib-2.0 >/dev/null 2>&1; then ?
[11:12:48] <Bushman> alex4nder: yes
[11:13:01] <Bushman> i run it in terminal and got no output
[11:13:07] <alex4nder> Bushman: it's supposed to return a 0 exit status
[11:13:14] <alex4nder> just run: pkg-config glib-2.0
[11:13:27] <Bushman> same
[11:13:40] <Bushman> i run it with --print-errors and got "not found" for this lib
[11:13:52] <alex4nder> Bushman: do you have libglib2.0-dev installed?
[11:15:06] <Bushman> well, lets say i don't. at this rate i will have to manually test for each one :(
[11:15:08] <ssi> zeeshan: I'm buying that RV6 this week
[11:15:14] <ssi> maybe I'll fly it to toronto soon
[11:15:14] <ssi> :D
[11:15:28] <zeeshan> nice
[11:15:34] <zeeshan> come down
[11:15:39] <alex4nder> Bushman: it's not that bad
[11:15:51] <ssi> i need to find a coarser prop for it
[11:15:57] <ssi> it's like 150kt right now, but it's underpropped
[11:16:03] <ssi> if I get the right prop, I bet I can get 165kt out of it
[11:16:19] <Bushman> alex4nder: so what's wrong in using the dependencies checking script actually?
[11:16:43] <Bushman> it works on ubuntu. what's wrong with it on debian?
[11:16:46] <alex4nder> Bushman: I have no idea; I didn't tell you not to use it
[11:17:01] <Bushman> ah, right.
[11:17:07] <Bushman> cradek: same question?
[11:17:27] <ssi> where'd you say you were? hamilton?
[11:19:24] <zeeshan> yes
[11:19:29] <zeeshan> youd wanna land in hamilton airport
[11:19:30] <zeeshan> im 5 min away
[11:19:35] <zeeshan> its in my backyard literally
[11:19:39] <zeeshan> and its cheap :P
[11:19:43] <zeeshan> or next closest is burlington
[11:20:19] <ssi> I think I have to go somewhere that has customs
[11:20:21] <ssi> hamilton probably does
[11:20:25] <zeeshan> it des
[11:20:25] <ssi> burlington might not
[11:20:26] <zeeshan> does
[11:20:30] <zeeshan> its an international airport
[11:20:49] <ssi> I've never flown internationally
[11:20:52] <ssi> it'll be an experience :P
[11:29:48] <DaPeace> Bushman: yes. Up to 50V for the chip itsself and the print on the board tells me 40V
[11:30:50] <Bushman> DaPeace: then yes. higher voltage will give you better results with higher step frequencies
[11:31:34] <Bushman> DaPeace: just make sure youset the current control very acurately or ven lower than specified if you can't get it just right"
[11:31:52] * Bushman can't even english today
[11:32:32] <Bushman> DaPeace: what is your motor type and what current/voltage?
[11:49:05] <ssi> holy god I'm ADD today
[12:07:34] <Bushman> something tells me i won't install it today >_<'
[12:08:44] * archivist denies being that something
[12:16:57] <Bushman> ok, i've managed to go through the configure stage.
[12:17:03] <Bushman> now make
[12:17:22] <Bushman> i hope no shit will hit the fan today.
[12:29:41] <DaPeace> Bushman: i have Nema23 with 4.2 AMP and Nema23 with 3 AMP.
[12:33:47] <Bushman> DaPeace: is there a voltage limit on the lable?
[12:39:14] <FinboySlick> ssi: Don't worry too much about crossing the Canadian border. We're still figuring out how to pay more for the fighterjets.
[12:40:00] <FinboySlick> They won't be able to intercept you for at least 3-4 more years.
[12:41:57] <ssi> lol
[12:42:21] <Bushman> heh
[12:42:28] <Bushman> also,
[12:42:35] <Bushman> installed the sim
[12:43:33] <Bushman> ehh... how much work person needs to do in order to not move ones lazy ass 3 meters to the other machine.
[12:49:36] <Bushman> s/ones/one's/
[12:51:33] <jtektool> UGGGH anyone know anything about servo dynamics sd1525 - 10 pinout?
[12:52:19] <jtektool> as in what if i have my +10v -10v signal backwards?
[12:53:22] <DaPeace> Bushman: no. there is voltage-label..
[12:54:50] <archivist> jtektool, then invert it if you need to
[12:55:05] <jtektool> it wont fry the servo board?
[12:55:44] <jtektool> (I have 7i77 wired to servo dynamics boards for + - 10v signals
[12:57:10] <jtektool> (just nervous, anyhow spent the greater part of the last two months putting this thing together now my encoders read fine and im ready to power up, just dont want to throw work doen the drain) LOL!
[12:58:53] <dirty_d> anyone think its a bad idea for me to make an AC/DC tig welder with four of these?
http://www.ebay.com/itm/PRX-IGBT-CM600HA-24H-Power-Modules-1200V-600A/261202362080?_trksid=p2054897.c100204.m3164&_trkparms=aid%3D222007%26algo%3DSIC.MBE%26ao%3D1%26asc%3D20140407115239%26meid%3Dedbfc4c911eb4be38c465a33ad9dbb0b%26pid%3D100204%26rk%3D2%26rkt%3D30%26sd%3D171390581358
[12:59:01] <archivist> jtektool,
http://gnipsel.com/linuxcnc/tuning/servo.html
[12:59:06] <dirty_d> using a DC stick welder as a power source
[13:07:09] <ssi> In this exercise you have to implement a PD controller to move a point mass to a desired position by exerting a force. The system can be described by the following equations:
[13:13:59] <Bushman> DaPeace: your answer is confusing. what's on the lable?
[13:14:49] <Bushman> DaPeace: anyway... if your motors are designed to handle 40V+ then you can go on and run them with 40V at their design curent.
[13:15:08] <Bushman> DaPeace: otherwise you risk frying them.
[13:16:59] <Bushman> DaPeace: you should also make sure you have adequate cooling for the motors. run them for some time a dry run and see if the motor gets burning hot, if yes, consider active cooling. if it's just very warm but still does not burn your hand, you can leave it as is.
[13:19:33] <Bushman> completely unrelated question: does anyone of you glue acrylic sheets together? if yes, with what glue?
[13:19:44] <ssi> zeeshan:
https://s3.amazonaws.com/uploads.hipchat.com/7809/18061/CGtLK1i1CBgbwdP/Screen%20Shot%202015-05-26%20at%201.57.16%20PM.png
[13:19:47] <ssi> awesome
[13:20:01] <archivist> Bushman, ask your local sign makers
[13:21:05] <JT-Shop> Bushman
http://www.mcmaster.com/#standard-acrylic-glue/=xcnepb
[13:21:18] <Bushman> archivist: people are dicks here in poland. asking someone "how do you do this or that in your business" is generally frowned uppon :(
[13:21:37] <Bushman> JT-Shop: thx
[13:21:47] <JT-Shop> yw
[13:21:59] <JT-Shop> mcmaster has a lot of info
[13:22:27] <Bushman> to much info
[13:22:37] <Bushman> brain melts
[13:23:46] <Bushman> i expected answers more like "i use <brand&type> for acrylic! works wonders!" or "i use generic superglue and the bonds are strong but look like crap" etc
[13:24:00] <Bushman> but thanks anyway.
[13:25:26] <archivist> those answers dont cross borders so easy
[13:25:36] <ssi> Bushman: I don't know if this helps you at all
[13:25:50] <ssi> but a lot of EAB guys use a product called Sikaflex for bonding acrylic canopies to metal frames
[13:26:16] <Bushman> ssi: i see. will take a look at it.
[13:26:55] <Bushman> tho i'm trying to bond 4 layers of 3mm color acrylic together to make a layered block that i will mill in later
[13:27:40] <Bushman> looking for a solution that not only will give me relatively strong bond but also fill any voids between the sheets
[13:27:56] <ssi> honestly I'd use something like medium CA for that
[13:28:08] <ssi> how big a sheet are we talking
[13:29:06] <ssi> I think CA is gonan be your ideal adhesive for acrylic to acrylic
[13:29:14] <Bushman> small, 50x50mm max
[13:29:20] <ssi> oh yeah definitely, medium CA
[13:29:26] <ssi> the medium won't run out, and will fill gaps well
[13:29:30] <Bushman> i'm doing tests with runny CA right now
[13:29:35] <ssi> just put a sizable glob on it and smash the sheets together
[13:29:41] <DaPeace> Bushman: the stepper-motors are only labled 3AMP. I will try out when my powersupply arrives. with 27-28V now its not possible to get them warm…
[13:30:21] <Bushman> DaPeace: good. then they should work nice with higher voltage
[13:30:41] <Bushman> DaPeace: just make sure to check the temperature with longer runs
[13:33:17] <DaPeace> yeah. i will do that. hope those powersupply is arriving quickly.. ive upgraded from smaller drives and the old supply is a little to small for 3x 4.2amp + 1x 3amp..
[13:37:41] <Bushman> i wonder for how long do i have to keep the sheets pressed together before CA cures
[13:38:16] <Bushman> technically it's an air tight bond on a large area.
[13:40:04] <archivist> I saw the same problem on TV the other night, run the sheets through a roller to remove the bubbles, then cure
[13:41:32] <Bushman> no no... there are not bubbles
[13:41:43] <Bushman> CA cures with air, right?
[13:42:07] <Bushman> like when the bottle is closed it's liquid, leave it open and it cures rock hard
[13:42:40] <skunkworks> and the 5i25 runs ok at 10khz :)
[13:42:53] <archivist> voids/bubbles, same thing it is how you force the join from one side to the other
[13:43:48] <Bushman> my test piece seems ok
[13:44:12] <Bushman> just don't know how long before it cures all the way through the center
[13:44:39] <archivist> use something that works regardless of air
[13:44:52] <archivist> add a hardener
[13:45:40] <Bushman> hmm... epoxy does not bond well to glossy acrylic i think.
[13:46:06] <Bushman> and i don't know what would work as a CA hardener but with delay
[13:46:19] <archivist> you can get activators for ca
[13:46:22] <Bushman> i only have thos spray for CA
[13:48:34] <Rab> Bushman, are you hoping for a transparent or attractive bond?
[13:49:24] <Bushman> Rab: the sheets are opaque.
[13:49:30] <Rab> Bushman, aha.
[13:49:34] <Bushman> i'm hoping for nice finish on the sides
[13:49:44] <Bushman> where you will see the bond.
[13:58:56] <Tom_itx> Bushman i use Weldon #4 for acrylic
[13:59:38] <ssi> I saw weldon referenced in the little bit of searching I did
[13:59:41] <Tom_itx> #16 is more a paste and comes in a tube
[13:59:52] <Tom_itx> #4 is liquid solvent
[14:00:27] <Tom_itx> if the joints are flat, #4 will wick under the joint and form a good bond
[14:00:28] <ssi> my freakin wrist hurts
[14:00:44] <ssi> I need to get a surplus Xray tube off ebay and build a little xray machine so I can take pics of it and see if it's ok
[14:02:01] <zeeshan> ssi: lol at that code
[14:02:03] <zeeshan> so small
[14:02:08] <ssi> :)
[14:02:20] <zeeshan> http://code.activestate.com/recipes/577231-discrete-pid-controller/
[14:02:22] <zeeshan> i got that one
[14:03:08] <Tom_itx> Bushman, you're better off using the Weldon solvent over CA
[14:03:20] <Tom_itx> it's purpose made
[14:03:46] <ssi> zeeshan: the next hw problem is a full quadrotor simulation... it sends position commands, and you have to write a 3d pid control that outputs a 3d velocity vector
[14:04:00] <zeeshan> nice
[14:04:05] <zeeshan> are you downloading the notes?
[14:04:22] <ssi> they're available on the wiki
[14:04:34] <dirty_d> its not really all that bad
[14:04:40] <zeeshan> in the online course
[14:04:42] <ssi> https://autonav.in.tum.de/handouts/lecture_4_part_4.pdf
[14:04:42] <zeeshan> is there an instructor
[14:04:44] <ssi> yea
[14:04:45] <Bushman> Tom_itx: i'll check it out if it's available here, thx ;]
[14:04:45] <zeeshan> that actually presents?
[14:04:48] <ssi> video lectures
[14:04:56] <ssi> and there's TAs that will help via forum
[14:05:26] <zeeshan> i will need this info soon
[14:05:30] <ssi> lol
[14:05:32] <zeeshan> when designing pressure control for my apparatus
[14:05:42] <ssi> "MY APPARATUS"
[14:06:57] <zeeshan> need to sort this light issue first
[14:06:59] <zeeshan> getting there slowly
[14:07:05] <zeeshan> ok im outta here, lab time
[14:08:46] <Tom_itx> don't blow up the lab
[14:21:47] <FinboySlick> Anyone knows where I could find a source of 5/16-32 bolts in the middle of nowhere? Are they common in automotive?
[14:22:03] <FinboySlick> I just need one to make a ghetto tap.
[14:22:07] <FinboySlick> (for plastic)
[14:22:08] <Tom_itx> 32 is fine thread
[14:22:23] <roycroft> they're not common anywhere
[14:22:29] <roycroft> 5/16-24 is the common fine thread
[14:23:12] <FinboySlick> Hmmm... 3/8-32 is used in lamp fixtures.
[14:23:29] <Tom_itx> also not so common
[14:23:43] <Tom_itx> 16 24 & 32 are the thread pitches
[14:23:47] <roycroft> 3/8-24 is the common fine thread
[14:24:01] <FinboySlick> Yeah though I can dig up lamp fixtures.
[14:24:03] <Tom_itx> 18 24 & 32 for 5/16
[14:25:09] <roycroft> all i'm suggesting is that it's quite uncommon and you're unlikely to find it in the middle of nowhere
[14:25:46] <FinboySlick> roycroft: Yeah.
[14:25:48] <roycroft> fine thread fasteners are uncommon in most automotive applications, and especially the more uncommon, finer pitches that you mention
[14:26:06] <roycroft> as in i'm not sure i've ever come across it
[14:26:10] <roycroft> and i'm a pretty old far
[14:26:11] <roycroft> t
[14:27:29] <FinboySlick> Browsing online, apparently there are grease fittings that are 5/16-32
[14:27:30] <ssi> 5/16 UNEF?
[14:28:06] <roycroft> you can buy a tap on amazon
[14:28:22] <ssi> or mcmaster
[14:28:56] <roycroft> amazon even have 5/16-27 taps
[14:29:01] <roycroft> which are even more unusual
[14:29:13] <roycroft> 5/16-24 being unf
[14:29:23] <FinboySlick> I guess I could get a single point thread mill.
[14:29:29] <FinboySlick> (I mean cutter)
[14:29:53] <FinboySlick> If it means ordering, that'd be more flexible a solution.
[14:30:12] <roycroft> you can make a single point thread cutter pretty easily
[14:48:38] <dirty_d> sweet, got IGBTs for a DIY tig welder for $44, now i just need to figure out cooling
[14:49:36] <SpeedEvil> dirty_d: ALL THE COOLING
[14:49:51] <SpeedEvil> dirty_d: more seriously - reckon a couple of volts drop each when on
[14:49:55] <SpeedEvil> so for 250A, 500W
[14:50:05] <SpeedEvil> half that if on half the time
[14:51:49] <dirty_d> theyre rated for 200A
[14:51:57] <dirty_d> dual igbt modules
[14:52:14] <dirty_d> about 2.3V at 200A
[14:52:27] <SpeedEvil> yehs
[14:52:39] <dirty_d> i think the only way im going to be able to run them at 200A is with water cooling
[14:52:53] <dirty_d> and like a radiator and fan for a cars oil or transmission cooler
[14:53:24] <dirty_d> i was gonna get the 1200V 600A mosfets, but Id need for and they were $40 each instead of $15 each for these, and I only need 2
[14:53:30] <dirty_d> IGBTs*
[14:53:36] <dirty_d> four
[14:54:24] <dirty_d> i think i can just mill out a block of aluminum, put a groove around it for sealant and bolt the igbt right on there
[14:54:26] <SpeedEvil> A nice thick bit of square Al tubing, with water flowing vigorously through
[14:54:35] <dirty_d> so the coolant makes direct contact with the metal base
[14:54:59] <SpeedEvil> I would worry about differential corrosion
[14:55:06] <dirty_d> hmm
[14:55:28] <dirty_d> even if i use like subaru coolant? i think it has stuff to prevent corrosion
[14:55:58] <furrywolf> grrr, stupid internet connection!
[14:55:59] <furrywolf> <furrywolf> fine thread is common for driveshaft flanges, flywheels, head bolts, and plenty of other things. I think subarus use fine thread almost everywhere...
[14:55:59] <furrywolf> <furrywolf> ford uses weird pointy fine-thread bolts for a lot of body fasteners. they _might) be 5/16-32. I don't have one around to measure.
[14:56:05] <dirty_d> these should be good enough for gate drive right?
http://www.irf.com/product-info/datasheets/data/irs2186pbf.pdf
[14:56:16] <ssi> zeeshan:
http://www.prototechnical.com/~imcmahon/quadcircle.png
[14:56:26] <dirty_d> the IGBT datasheet has all the specs with gate drive at 15V through a 9ohm resistor
[14:56:26] <roycroft> nobody is arguing that fine thread fasteners are not common
[14:56:46] <dirty_d> so 1.6A max, and the gate drives can provide 4A
[14:56:53] <roycroft> the point is that the thread pitch for 5/16 unf fasteners is 24
[14:57:04] <ssi> yeah UNEF is less common :P
[14:57:09] <SpeedEvil> dirty_d: I dunno
[14:57:11] <roycroft> 5/16-32, while a defined standard thread, is not the common one
[14:57:36] <SpeedEvil> dirty_d: you absolutely don't care if you charge the gate in faster than ~100us or so
[14:57:39] <SpeedEvil> dirty_d: in this app
[14:57:57] <SpeedEvil> dirty_d: gate drive deosn't matter as long as it's more than several milliamps
[14:58:01] <furrywolf> just remember that if you're replacing an aircraft windshield, even though 8-32 bolts fit in 10-32 nuts, it's a bad idea. can't remember when that happened, but it wasn't too long ago...
[14:58:55] <roycroft> that should be criminal negligence
[14:58:58] <dirty_d> SpeedEvil, really?
[14:59:09] <dirty_d> yea i guess, the wont be switching faster than 200Hz
[14:59:23] <SpeedEvil> dirty_d: it increases losses during switching only
[14:59:31] <dirty_d> yea
[14:59:34] <furrywolf> heh, I've built gate drives of tens of amps.
[14:59:47] <dirty_d> high side is tricky
[14:59:48] <roycroft> it's impossible to insert an 8-32 bolt in a 10-32 nut and not know something is wrong
[14:59:51] <dirty_d> never tried to make one
[15:00:06] <dirty_d> if i did, id probably use batteries :p
[15:00:11] <SpeedEvil> roycroft: I could do it.
[15:00:12] <furrywolf> roycroft: it's not impossible, since it's happened. :P
[15:00:22] <roycroft> read the entire line
[15:00:47] <SpeedEvil> dirty_d: it's really not if you're fucking lazy.
[15:00:48] <SpeedEvil> see:
[15:00:55] <roycroft> whoever did that knew something was wrong but did not care
[15:00:56] <furrywolf> the maintenance guy didn't realize he'd screwed up. even when someone pointed out they were probably the wrong bolts. never underestimate people's abilities to not notice something wrong.
[15:01:09] <SpeedEvil> http://www.analog.com/en/products/interface-isolation/isolation/standard-digital-isolators/adum5230.html
[15:01:23] <SpeedEvil> furrywolf: my favourite story along those lines
[15:01:46] <SpeedEvil> furrywolf:
http://en.wikipedia.org/wiki/NOAA-19
[15:01:49] <roycroft> i should clarify that my statement is in the context of aircraft maintenance
[15:01:59] <furrywolf> for high-side I've used a charge pump and regulator, but there's plenty of ways. you can also buy high-side chips that do all the work for you. (assuming you're using N-channel for both high and low... if you're using P-channel for high, it becomes a lot easier)
[15:02:10] <roycroft> sure, a backyard mechanic might not realize something is wrong
[15:02:23] <SpeedEvil> furrywolf: the above is supremely lazy, it not only has gate drive, it also has isolated power, all in a $4 chip
[15:03:00] <furrywolf> roycroft: if I remember right, it was the head mechanic or something too.
[15:03:04] <furrywolf> sec, I'll google it.
[15:03:18] <dirty_d> SpeedEvil, yea the IRS2186 is like that
[15:03:32] <roycroft> that wikipedia article is disappointing
[15:04:07] <roycroft> lockheed personnel negligently caused $135 million damage to a satellite
[15:04:17] <roycroft> lockheed agreed to forgoe their profit
[15:04:22] <roycroft> and ate $30 million
[15:04:29] <dirty_d> SpeedEvil, I figure for the voltage spikes when the IGBTs turn off, I'll just put a TVS diode across the DC rails
[15:04:29] <roycroft> the government had to pony up the rest
[15:04:39] <roycroft> why did not lockheed pay the entire $135 million to fix it?
[15:04:43] <roycroft> they are the ones who broke it
[15:04:48] <furrywolf> http://en.wikipedia.org/wiki/British_Airways_Flight_5390 and
http://www.aaib.gov.uk/cms_resources/1-1992%20G-BJRT%5B2%5D.pdf
[15:04:54] <dirty_d> those can handle like 100kW during the short switching time
[15:05:09] <dirty_d> TVS diode and snubber for good measure
[15:05:28] <roycroft> if i took my car to a mechanic and the mechanic dropped it off the lift, i would not expect the mechanic to forgoe his profit and pay me $200 towards the damage
[15:05:30] <SpeedEvil> dirty_d: tha analog part is entirely isolated gate power drive
[15:05:37] <SpeedEvil> dirty_d: with a little transfofrmer
[15:05:37] <roycroft> i would expect the mechanic to replace/repair the vehicle
[15:05:46] <roycroft> why should the government expect any less?
[15:06:23] <dirty_d> SpeedEvil, I just saw an article on something like that
[15:06:32] <dirty_d> tiny spiral taht forms a transformer
[15:07:16] <SpeedEvil> yes, these are those
[15:07:47] <SpeedEvil> roycroft: I suspect there is a boring contractual answer along the lines of 'the government was partially to blame'
[15:08:04] <SpeedEvil> http://www.nasa.gov/pdf/65776main_noaa_np_mishap.pdf
[15:08:08] <SpeedEvil> If you care enough
[15:08:12] <furrywolf> roycroft: with most of the mechanics I've met, you'd be lucky if he even admitted it was his fault. most mechanics seem to be crooks.
[15:09:06] <roycroft> likely so, speedevil
[15:09:16] <roycroft> however, it's my tax dollars lining lockheed's pockets
[15:09:24] <roycroft> and i don't like that at all
[15:09:31] <furrywolf> it obviously was your fault for giving him a vehicle with faulty brakes, or whatever excuse he could make up.
[15:09:43] <furrywolf> a _lot_ of your tax dollars line lockheed's pockets.
[15:09:59] <roycroft> yes, because we're a welfare state
[15:10:06] <roycroft> but it's corporate welfare, not welfare for the needy
[15:10:44] <SpeedEvil> roycroft: three letters. SLS
[15:11:05] <SpeedEvil> The space program is not a space program - with very few exceptions.
[15:11:15] <SpeedEvil> It's a corporate welfare program.
[15:11:52] <SpeedEvil> The SLS progam - up to second launch - could buy enough commercial launch with the funding to launch 21000 tons of cargo into space.
[15:12:00] <furrywolf> spending on space is trivial compared to spending on miltary.
[15:12:02] <furrywolf> military
[15:12:05] <SpeedEvil> And that's assuming you can't get any cost breaks.
[15:12:30] <SpeedEvil> If F9H gets reusability worked out, 100000 tons is quite plausible.
[15:12:46] <SpeedEvil> 100000 tons would make quite an awesome space-station.
[15:12:50] <furrywolf> every test they get closer to landing the first stage
[15:13:09] <SpeedEvil> I like one australian podcast I heard.
[15:13:23] <SpeedEvil> 'The stage landed vertically, though too fast for reuse'
[15:13:30] <SpeedEvil> Technically true, but :)
[15:13:49] <furrywolf> it then became horizontal, and then became vertical, horizontal, diagonal, sideways, inside out,...
[15:14:59] <furrywolf> http://en.wikipedia.org/wiki/File:NOAA-N%27_accident.jpg there's some meme that's got to be able to be applied to that...
[15:18:37] <ssi> I want to try to make a small satellite launcher that uses a weather balloon as a first stage
[15:19:16] <furrywolf> that's not easy.
[15:19:17] <ssi> I figure if you can start from 100km up, you need much less ∆v to waste on aero drag
[15:19:25] <furrywolf> trying does not always result in succeeding. :)
[15:19:42] <ssi> agreed, but the failure rate of not trying is 100% :D
[15:20:03] <ssi> and it's a neat set of projects
[15:20:08] <ssi> start with a 3 axis reaction wheel
[15:20:48] <ssi> I could do my own vomit comet flights to test the reaction attitude control :D
[15:20:49] <furrywolf> no, start with not exploding AND making sufficient thrust. everything else is details. :P
[15:21:35] <_methods> get up to altitude then spin around the balloon lol
[15:21:46] <_methods> spin up to speed hehe
[15:21:58] <furrywolf> it takes a lot of energy to get to orbit
[15:22:06] <ssi> yes it does
[15:22:16] <ssi> 12.5km/s ∆v I think?
[15:22:38] <furrywolf> and that energy has to be released slowly. releasing it quickly may be easier, but then you go all directions, not just upwards. :)
[15:23:25] <ssi> it's only rocket science :P
[15:23:27] <ssi> hahaha
[15:23:31] <_methods> hehe
[15:23:49] <furrywolf> start by reading Ignition! it won't help you build your rocket, but it's a good read anyway. :P
[15:23:50] <_methods> it's not brain surgery
[15:23:55] <ssi> it's not rocket surgery
[15:24:26] <_methods> well technically.....
[15:25:22] <ssi> heheh
[15:25:49] <ssi> anyway, just gotta keep the payload small
[15:26:03] <furrywolf> http://fringe.davesource.com/Fringe/Explosives/Ignition.An-Informal-History-of-Liquid-Rocket-Propellants.John-D-Clark.pdf
[15:26:06] <furrywolf> read. :P
[15:27:13] <ssi> I actually have access to a test cell
[15:27:13] <ssi> haha
[15:27:39] <furrywolf> it's way more entertaining than any science book should be. :)
[15:28:11] <furrywolf> it's worth reading even if you're not building a rocket.
[15:29:53] <PetefromTn_> ssi what is it you wish to stick up into lower orbit man LOL?
[15:30:38] <_methods> loaded question
[15:31:00] <_methods> lol
[15:31:01] <PetefromTn_> hey man whats up methods!
[15:31:08] <_methods> nada
[15:31:09] <ssi> it's not the what, it's the how
[15:31:09] <ssi> :D
[15:31:17] <_methods> and the who
[15:31:26] <furrywolf> by the way, if you ever see a copy of that book at a yard sale, buy it. the resale value, like the topic, is a bit astronomical.
[15:31:40] <PetefromTn_> I'll bet he wants to put a LASER up there
[15:31:56] <_methods> pew pew
[15:32:03] <PetefromTn_> xactly
[15:32:07] <_methods> he'll burn YOUR house down
[15:32:08] <furrywolf> oh, amazon has one cheap... only $2900.
[15:32:24] <furrywolf> http://www.amazon.com/gp/offer-listing/0813507251/ref=tmm_hrd_used_olp_sr?ie=UTF8&condition=used&sr=&qid=
[15:32:37] <ssi> _methods: I'll need some crazy optics for that
[15:32:40] <_methods> hahah
[15:33:04] <_methods> was the urban legend that pizza hut or pepsi wanted to burn it's logo into the moon?
[15:33:21] <_methods> surprised no one has actually done that yet
[15:33:43] <ssi> there's a heinlein story about it
[15:33:56] <ssi> http://en.wikipedia.org/wiki/The_Man_Who_Sold_the_Moon
[15:34:04] <_methods> hehe
[15:34:11] <_methods> love that guys books
[15:34:24] <_methods> job cracked me up
[15:37:27] <_methods> him and vonnegut
[15:38:00] * furrywolf wonders how many people in here are not reading Ignition!
[15:38:03] <furrywolf> s/not/now
[15:38:35] <ssi> I certainly am
[15:38:56] <furrywolf> good :)
[15:39:27] <furrywolf> it's not likely to be helpful for your rocket, unless you're planning on developing a liquid fuel system from scratch, but it's a very good read.
[15:43:20] <furrywolf> then again, it's entirely possible I'm odd, and may enjoy reading different things.
[15:43:55] <_methods> like different shampoo bottles?
[15:44:04] <furrywolf> ?
[15:44:27] <_methods> different boxes of cereal?
[15:45:09] * furrywolf doesn't get it
[15:50:50] <furrywolf> I guess I should re-adjust the valves on the genny, try to figure out how I fucked up yesterday... first time I've ever had a valve adjustment come out wrong. my guess is the engine rotated to somewhere other than tdc when I wasn't paying attention, maybe when I tilted it for access. will pull the spark plug and double-check tdc when I do it today.
[15:51:46] <furrywolf> it's ticking badly, obviously one valve is way loose... but I double-checked them when done yesterday and it was good. right size feeler was a slip fit, .001 larger was a tight fit.
[15:51:55] <ssi> furrywolf: did you see the pic I linked earlier?
[15:52:05] <furrywolf> no
[15:52:08] <ssi> http://www.prototechnical.com/~imcmahon/invribbon.png
[15:52:42] <cradek> furrywolf: on my 52 chevy I followed instructions carefully ... the first time. after that didn't work, I just monkeyed with them while it was warmed up and running until each one barely didn't rattle
[15:52:52] <furrywolf> someone doing aerobatics?
[15:53:01] <cradek> furrywolf: it's still running as far as I know :-)
[15:53:09] <ssi> yea helping a friend practice his routine for the show this wkd
[15:53:13] <ssi> I'm holding the pole on the left :P
[15:53:29] <ssi> that's actually a still from this video
[15:53:29] <ssi> https://app.box.com/s/z44n2t0akrgybc9es9rd0jg3d9ckx8ar
[15:53:40] <furrywolf> cradek: heh, I set points like that every time.
[15:54:54] <furrywolf> except I don't even need to monkey much... I just set them by eye and everything runs great. too much experience, methinks...
[15:58:34] <furrywolf> meh. I might be too tired to fuck with the genny. I got woken up at 3:30am by an earthquake today.
[15:59:12] <SpeedEvil> furrywolf: did you slide into the sea yet?
[15:59:39] <furrywolf> no
[16:02:23] <XXCoder> california sliing into ocean is myth'
[16:02:49] <ssi> thanks cap'm obvious
[16:03:04] <furrywolf> right up there with santa claus and honest politicians?
[16:03:40] <roycroft> the truth is a lot scarier than that, xxcoder
[16:03:53] <roycroft> what's actually happening is that los angeles is sliding up to san francisco
[16:03:57] <XXCoder> no problem lt. olvuouspointer
[16:04:01] <roycroft> in a few million years it will be due west of sf
[16:05:00] <furrywolf> ewww. that's only six hours from here. I'll need to move to oregon. :P
[16:05:14] <furrywolf> being six hours from la would be waaay too close.
[16:05:18] <roycroft> please feel free to visit oregon
[16:05:20] <roycroft> and then go back home
[16:05:21] <ssi> I'm six hours from la
[16:05:23] <roycroft> thank you very much
[16:05:29] <ssi> by 767
[16:05:31] <ssi> :P
[16:06:39] <furrywolf> roycroft: oregon seems like a nice place to live. it's a lot like here.
[16:06:47] <roycroft> hmm
[16:06:48] <ssi> where is 'here'
[16:07:00] <furrywolf> ssi: far northern california, just below oregon
[16:07:03] <ssi> gotcha
[16:07:06] <ssi> it's basically the same thing :P
[16:07:10] <furrywolf> yep
[16:07:12] <roycroft> so out of the last 12 earthquakes in the us, 2 were in puerto rico, 4 in california, and six in oklahoma
[16:07:43] <roycroft> the one furrywolf is talking about was really close to the coast
[16:07:46] <ssi> I think one was in georgia wasn't it?
[16:07:47] <XXCoder> LA is 0.005845975 second away from me
[16:07:49] <XXCoder> in c
[16:07:52] <roycroft> usually they're well out to sea in that prt of cali
[16:08:16] <ssi> never mind your numbers add up to 12 lol
[16:08:21] <Deejay> gn8
[16:08:45] <roycroft> fracking is perfectly safe, mmmkay?
[16:08:55] <furrywolf> lol, I missed the line about the earthquake being close to the coast, and thought you were describing the people here as well out to sea... which I also agree with.
[16:10:38] <furrywolf> it was only a 4.4, but it woke me up... and now I didn't get nearly enough sleep and am feeling pretty useless.
[16:11:17] <roycroft> 4.4 that close in is enough to wake one up
[16:11:20] <furrywolf> I should go tweak on one of the other generators... adjusting valves requires a greater level of awakeness than nondirected tweaking.
[16:12:08] <furrywolf> also need to swing by one of the shops and pick up a timing belt for the eu2000
[16:13:19] <SpeedEvil> furrywolf: Is there any sort of earthquake compensation you can claim on? 'It woke me up' -> $2000
[16:13:45] <furrywolf> no
[16:15:51] <ssi> And then Esnault- Pelterie tried to use tetranitromethane, C(N02)4 for his oxidizer, and promptly blew off four fingers.
[16:16:47] <furrywolf> when you put lots of nitrogens in one place, they get mad at each other and want to be as far away as possible...
[16:18:18] <SpeedEvil> I wish ozone was tractable
[16:18:27] <SpeedEvil> liquid ozone would be awesome for rocketry
[16:18:44] <furrywolf> the book has a section on ozone. read the book. :P
[16:21:14] <furrywolf> also ozone fluoride, and all sorts of other fun-sounding compounds
[16:22:37] <SpeedEvil> Practically.
[16:22:53] <SpeedEvil> Once you're >>1 ton - the requirements on propellants relax considerably
[16:23:06] <SpeedEvil> As long as you stay away from H2
[16:28:17] <furrywolf> For it has its drawbacks. The least of these is that it's at least astoxic as fluorine. (People who speak of the invigorating odor of ozonehave never met a real concentration of it!) Much more important isthe fact that it's unstable -- murderously so.
[16:28:34] <furrywolf> At the slightest provoca-tion and sometimes for no apparent reason, it may revert explosivelyto oxygen. And this reversion is catalyzed by water, chlorine, metaloxides, alkalis --and by, apparently, certain substances which havenot been identified. Compared to ozone, hydrogen peroxide has thesensitivity of a heavyweight wrestler.
[16:28:48] <ssi> lol
[16:29:48] <furrywolf> from Ignition!, page 112. :P
[16:32:03] <furrywolf> (missing spaces due to crap copy+paste job, not original text)
[16:34:16] <furrywolf> the book is worth reading even if just as an example that you can write well about what most would consider a very dry subject.
[17:01:38] <witnit> Anyone done a bridgeport boss 3 conversion?
[17:04:07] <witnit> I have an upcoming conversion of 3 boss 3 stepper and 1 boss 5 servo w/toolchanger........worth my efforts?
[17:04:40] <Tom_itx> why not?
[17:05:19] <witnit> I mostly use turning machines, i just dont know if the bridgeports are desirable while the vmc are so abundant
[17:06:11] <ssi> a vmc is probably a more desirable conversion, but the boss machines are great if you have them
[17:06:16] <ssi> I wouldn't mind one
[17:06:48] <witnit> so, if i do it, should i drop the steppers and just put servo in or stick with the steppers?
[17:07:08] <Tom_itx> they worked for years and are already mounted
[17:07:13] <ssi> agreed
[17:07:16] <witnit> right
[17:07:22] <witnit> i never used stepper before
[17:07:35] <ssi> steppers are simpler by a fair bit
[17:07:39] <witnit> wasnt sure if there was any issues with them i dunno about.
[17:07:43] <ssi> and they're clearly already well matched to the machine
[17:07:58] <Tom_itx> not sure how much current they require
[17:08:25] <Tom_itx> maybe the exhisting drivers are still good
[17:08:35] <ssi> One of the oddest combinations to be investigated was tried by RMI, who burned d-limonene with WFNA. d-limonene is a ter- pene which can be extracted from the skins of citrus fruits, and all during the runs the test area was blanketed with a delightful odor of lemon oil. The contrast with the odors of most other rocket propel- lants makes the event worth recording.
[17:08:40] <witnit> yeah i dont know anything about matching stepper motors to drives either, i will have to see what others have done or do my research on these motors
[17:08:56] <ssi> you just need a drive with a high enough current rating for the motors
[17:09:08] <Tom_itx> the boss5 would be the more desireable of the 3
[17:09:18] <Tom_itx> incidentally i sent archivist my boss5 book
[17:09:22] <witnit> yeah its the only i want for myself
[17:09:30] <ssi> and a power supply of sufficiently high voltage to overcome the inductance of the motor coils for quick charging, and sufficiently high current to run the motors
[17:09:42] <ssi> I'd shoot for at least 2x the current of one motor
[17:10:33] <PetefromTn_> http://i.imgur.com/gWfLb0C.jpg ;)
[17:10:48] <ssi> vrynice
[17:10:58] <witnit> wellim sure there will be plenty of juice to pick from in the box but i will have to learn my drives, arent there many different wiring of some kinds of steppers or basicaly any stepper motor works with any drive?
[17:11:20] <PetefromTn_> Thanks man
[17:11:22] <witnit> very nice PetefromTn_
[17:11:28] <jtektool> does it make sense to anyone else that my servo reset path should be normally closed (shorted to) ground?
[17:11:34] <witnit> cant word it any better than ssi
[17:11:45] <ssi> there's different ways to wire steppers
[17:11:48] <jtektool> cuz thats what it looks like, i figured it would be normally open
[17:11:50] <ssi> chances are good they're bipolar steppers
[17:11:51] <PetefromTn_> almost finished with these
[17:11:55] <ssi> and most drives are bipolar
[17:12:00] <witnit> i read something about 8 wires
[17:12:02] <Tom_itx> they don't fit
[17:12:06] <ssi> they're really pretty easy to deal with
[17:12:08] <witnit> but thats all in the grape vine
[17:12:19] <ssi> step 1 is identify the motors on the machine
[17:12:38] <ssi> if you have drives from the original control, identify them and figure out if they're reusable
[17:12:41] <ssi> same with power supplies
[17:13:34] <witnit> i feel like i should add encoders to them for safety
[17:13:51] <ssi> meh
[17:14:10] <ssi> about the only thing encoders might gain you is more repeatable homing
[17:14:22] <ssi> on a lathe I like that idea, on a mill I don't think it's worthwhile
[17:14:26] <witnit> or it stops the drives if there is a crash?
[17:14:28] <witnit> :)
[17:15:29] <ssi> I spose
[17:16:48] <witnit> I thought about making a current monitor that only measures during my drilling cycle for one job and if it raises above the threshhold i set, it will perfom an m1 at the end of the part, signifying dull tooling
[17:17:17] <ssi> better off with servos if you want to monitor load like that
[17:17:34] <witnit> well thats for a screw machine
[17:17:51] <ssi> spindle load then
[17:18:14] <witnit> my spindle is just a big hunky drive motor
[17:19:17] <witnit> it drives all the cam actions and spindle, just the turret and slides and servo
[17:19:21] <witnit> are*
[17:27:00] <furrywolf> grrrrrr! I adjusted the valves again. they still tick. this time I double-checked everything about ten times, including spinning the engine over, finding tdc again, and checking again....
[17:27:20] <furrywolf> I might just turn them in a twelth of a turn at a time until the tick goes away.
[17:28:57] <furrywolf> either I'm repeatedly screwing something up, or the specs I found are wrong, or something...
[17:32:24] <ssi> http://9to5mac.com/2015/05/26/fire-apple-mesa/
[17:32:30] <ssi> I swear it wasn't mah space laver
[17:32:31] <ssi> lazer
[17:33:06] <PetefromTn_> Oh we would never think it was your space laser since you are such an Apple Fanboy LOL
[17:33:24] <ssi> lol
[17:36:06] <PetefromTn_> Jeez I am so pissed at this jackhole who is selling something I might want on Craigslist but left NO way to contact him... What a moron!!
[17:38:02] <zeeshan> since we're venting
[17:38:05] <zeeshan> ill vent too
[17:38:17] <zeeshan> http://www.summitracing.com/int/search/part-type/y-fittings/fitting-size-1/minus-8-an/fitting-size-2/minus-6-an?N=4294920968%2B4294947250%2B4294926920&SortBy=Default&SortOrder=Ascending
[17:38:30] <zeeshan> not a single one of these manufacturers makes a mounting bracket for their Y in this format.
[17:38:49] <zeeshan> i ended up buying magnafuel y a while back, decided to contact them to see. they also don't make it
[17:38:57] <zeeshan> i asked them if they could give me a drawing, they didnt reply lol
[17:39:11] <zeeshan> now i have to measure this retarded shaped thing to make a bracket.
[17:39:19] <zeeshan> http://static.summitracing.com/global/images/prod/large/mrf-mp-6286_w.jpg
[17:39:57] <zeeshan> end of vent
[17:40:15] <PetefromTn_> wonder if there is enough meat in the crack there to just drill a small hole and screw it down to something...?
[17:40:43] <zeeshan> http://www.magnafuel.com/products/accessories/y-fittings/Y-FittingCutaway-200pxW.jpg
[17:40:46] <zeeshan> nope
[17:40:49] <zeeshan> not enough material
[17:41:11] <PetefromTn_> hm almost looks like there is at the top
[17:41:21] <furrywolf> that looks to me like an inline fitting, not one you mount...
[17:41:42] <zeeshan> furrywolf: leaving a fitting like that dangling is a bad idea
[17:42:15] <zeeshan> gonna just make a strap for it
[17:42:21] <furrywolf> secure the hoses to it
[17:42:28] <zeeshan> i dont like doin that :P
[17:42:38] <zeeshan> like my fuel hoses are secure
[17:42:47] <zeeshan> but lets say you wanna tighten a hose to this fitting now
[17:42:51] <zeeshan> theres no good way to hold it.
[17:43:08] <zeeshan> if you just secure at the hose, you twist the hose
[17:43:29] <PetefromTn_> machine yourself a better one!!
[17:43:33] <zeeshan> lol
[17:43:44] <zeeshan> i spent 35 bux on this a while back :(
[17:43:46] <zeeshan> otherwise i would
[17:44:21] <zeeshan> im going to take the fitting to school and shadow graph it
[17:44:24] <zeeshan> will be easier to draw up
[17:49:49] <furrywolf> I didn't secure ANY hoses on my subaru... I need to, but it's been pushed to a "when I have nothing better to do" project.
[17:49:57] <furrywolf> power steering is just draped on top of the tranny, etc.
[17:50:05] <zeeshan> im pretty paranoid about this stuff
[17:50:18] <zeeshan> last thing i want at 195 mph is a fuel hose comin loose
[17:50:28] <furrywolf> I secured the fuel lines, but nothing else
[17:50:35] <furrywolf> wiring and other hoses are still floppy
[17:51:59] <furrywolf> the fuel system on it is creative. it'll be interesting to see what the long-term results are.
[17:52:51] <furrywolf> http://fw.bushytails.net/crappyfueldiagram.png the fuel loops
[17:53:32] <zeeshan> pe to ke converter?
[17:53:33] <zeeshan> what
[17:55:20] <furrywolf> engine
[17:55:32] <zeeshan> :P
[17:55:36] <furrywolf> that was in response to something someone else said when I was drawing that... I don't remember what now
[17:56:01] <zeeshan> youre missing fuel injectors in that diagram! :P
[17:57:21] <furrywolf> I'm looping the full flow of the high pressure pump back through the stock subaru 3-nippled fuel filter. so far it works great.
[18:38:48] <Tom_itx> pcw when you get a min, i need to find out where the 5i24 FPGA source is or a compiled ver to upload. I borked it. W10 was down when i loaded the bitfile and now it hangs the pc when plugged in
[18:39:26] <Tom_itx> i've got a jtag on the way..
[18:39:49] <PCW> W10 is unlikely to do anything, more likely the bitfile has an issue
[18:43:18] <PCW> its possible to recover without JTAG, though a bit awkwardly by preventing the FPGA load at startup and then using mesaflash to re-init the card
[18:46:28] <Tom_itx> the pc hangs with the card in it
[18:46:57] <Tom_itx> i tried the --recover option already
[18:47:45] <Tom_itx> i'd be willing to try if you think it might work
[18:48:01] <Tom_itx> mesaflash returns 'card not found'
[18:48:13] <Tom_itx> or some such message
[18:49:11] <Tom_itx> i should have checked the jumper but i figured it would be in the default setting
[18:50:20] <furkanyilmaz> How can I use this code with linuxcnc?
http://kvarc.extra.hu/step/motor/emc/emckinematics.html
[18:52:38] <Tom_itx> furkanyilmaz, that might help:
http://linuxcnc.org/docs/2.7/html/motion/kinematics.html
[18:53:21] <furkanyilmaz> I already read it.
[18:53:44] <furkanyilmaz> But currently I have no Idea about how to run this codes on linuxcnc
[18:55:01] <furkanyilmaz> I think there are something called as HAL. I tried the read documents about it. But its too complicated
[18:55:23] <furkanyilmaz> And I couldnt understand anything
[18:55:51] <furkanyilmaz> Is there an anybody to help me with teamviewer and skype?
[18:56:03] <furkanyilmaz> Or is there an any video tutorial?
[18:56:22] <Tom_itx> if you hang around somebody might
[18:57:29] <Tom_itx> PCW the bitfile was one i used on the 7i90 and recompiled for the 5i24
[18:58:21] <furkanyilmaz> I am not hanging, I am trying to understand from documents
[18:58:35] <furkanyilmaz> And after 12 hours of document reading and research
[18:58:41] <furkanyilmaz> I couldnt run the code
[18:58:59] <furkanyilmaz> I am just 18 and I am not an engineer
[18:59:13] <furkanyilmaz> I know mach3 but linuxcnc is more complicated
[18:59:19] <furkanyilmaz> So really I need help
[18:59:40] <Tom_itx> if someone is here that can help, they will
[18:59:54] <PCW> Tom_itx W10 does nothing so must be a bad bitfile
[19:00:10] <Tom_itx> ok so how do i get the card back?
[19:00:28] <PCW> well either JTAG or pencil
[19:06:49] <Tom_itx> PCW, will i need to reload the FPGA configuration or somehow erase the bitfile code?
[19:07:23] <PCW> I think what I normally do is short the M25P16 pins 6 and 7 with a pencil at powerup
[19:07:57] <Tom_itx> i recall you walking somebody thru that quite a while back
[19:08:04] <Tom_itx> what does shorting those pins do?
[19:08:19] <PCW> (this ties the clock line high so the FPGA cannot load)
[19:08:38] <Tom_itx> while booting the pc?
[19:08:50] <PCW> (only needed for a second or so at power on)
[19:09:01] <Tom_itx> i'll give it a try
[19:09:25] <Tom_itx> then do the mesaflash --recovery?
[19:09:35] <PCW> Yes
[19:09:52] <Tom_itx> i need to get a pc out where i can get to it then i'll try it
[19:10:03] <PCW> though you may have to reboot (not power cycle)
[19:10:19] <Tom_itx> after shorting the pins?
[19:10:30] <Tom_itx> or during?
[19:11:34] <PCW> well actual I guess thats not needed (the XIO2001 bridge chip and its GPIO should be present in any case but)
[19:12:05] <PCW> if the FPGA loads its bitfile, all bets are off
[19:13:36] <PCW> umm how can mesaflash say card not found if you cannot boot with the card installed? (unless you ran it without the card installed)
[19:14:18] <Tom_itx> it booted once in the pcie1 slot and once in the pcie16 slot then no more
[19:16:40] <Roguish> PCW: Please check the forum. I replied to you reply. thx.
[19:17:14] <Roguish> Tom_itx: are you working on a 5i24 or 6i24 or what?
[19:18:13] <Tom_itx> 6i24 but it takes 5i24 firmware
[19:18:31] <Roguish> hey hey. so am I.
[19:18:33] <PCW> I would check the enable pins on the 7I39 (and verify that the bitfile is loaded and the pinout is correct)
[19:19:09] <Roguish> verified pinout via dmesg.
[19:19:09] <PCW> you need to power cycle the CPU to load a new bitfile
[19:19:43] <Tom_itx> PCW when you get those 7i90's up i'd like to purchase those 3 chips along with the card if possible
[19:20:07] <PCW> I would then check the enable pin status in HAL
[19:20:40] <PCW> and the fault input polarity and status
[19:21:20] <PCW> common reasons a 7I39 does not work...
[19:24:05] <PCW> The pinout file that was used to make the 5I24 config is probably a few years newer and may have some minor differences in the enable and fault connections
[19:25:39] <Roguish> PCW, Like i mentioned in the forum post, I swap back into the 5i20 setup and everything works ok. literally only the MB and fpga board change. nothing else.
[19:26:04] <PCW> The pinout file that was used to make the 5I24 config is probably a few years newer and may have some minor differences in the enable and fault connections
[19:27:32] <Tom_itx> the MP25P16 is an 8pin chip?
[19:27:35] <PCW> that's why I asked to check the TPPWMs enable status
[19:27:57] <PCW> Yes 8 pins
[19:28:11] <Tom_itx> top2 center pins?
[19:28:23] <Tom_itx> i think their logo is pin1
[19:29:39] <Roguish> TPPWM? u mean the '3pwmgen.01.enable' ?
[19:29:53] <PCW> Roguish: check the 3ppwmgen's fault pin in hal
[19:31:00] <Roguish> ok, done. it's ON (big bright yellow dot)
[19:31:15] <Roguish> in the 'watch' area
[19:31:21] <PCW> well thats why it not working
[19:31:36] <Roguish> wha?
[19:32:25] <PCW> The pinout file that was used to make the 5I24 config is probably a few years newer and may have some minor differences in the enable and fault connections
[19:32:37] <PCW> :-)
[19:34:22] <PCW> do you have fault-invert set ?
[19:35:23] <Roguish> ok, set the fault pin invert to 1, and looks better.
[19:35:40] <PCW> if the fault input is not used (and so tied logically to '0' in the bitfile) you need to set fault-invert
[19:36:21] <Roguish> so, just how the heck is the user supposed to know that little detail?
[19:38:27] <PCW> the hostmot2 manusl and the pinouts (sudo mesaflash --device 5i24 --readhmid) have all the info needed
[19:38:56] <Roguish> well, all axes happy now. so much for a few hours today.
[19:39:11] <PCW> if the 5I20 bitfile was updated you would run into the same thing
[19:39:19] <Tom_itx> shorting pins 6 & 7 didn't seem to help
[19:39:40] <PCW> did it prevent the load?
[19:39:46] <Roguish> ok, that leads to the question, when are the 5i20 files to be updated?
[19:39:51] <Tom_itx> pc wouldn't boot
[19:39:58] <PCW> (2 red LEDs on)
[19:40:05] <Tom_itx> red / yellow
[19:41:24] <PCW> and normally these go out?
[19:41:27] <furrywolf> PCW: the manual 6i24 is self-conflicting on the led colors. on one page it says both are red, the next page it says one is red and one is yellow. I think it was 15 and 16.
[19:41:31] <Tom_itx> no they stay on
[19:41:50] <furrywolf> regardless if colors, it says if both stay on, the fpga failed to load.
[19:44:55] <PCW> ok so its a bad or wrong bitfile so no need to mess with the EEPROM
[19:44:57] <PCW> the FPGA is floating so try booting with W2 up (or down, I forget)
[19:45:43] <Tom_itx> W2 is up right now
[19:46:03] * Tom_itx tries with W2 down..
[19:46:21] * furrywolf has no idea if pcw has anything to do with fixing manuals, but figured pointing it out can't hurt. :P
[19:46:58] <Tom_itx> it's booting this time
[19:47:00] <Tom_itx> yay!
[19:47:18] <Tom_itx> do i need to move W10 for recover?
[19:47:36] <PCW> W10 does nothing
[19:47:47] <Tom_itx> it must!!! it's there!
[19:47:49] <Tom_itx> :)
[19:47:54] <Tom_itx> you told me that before
[19:48:08] <Tom_itx> i'd forgotten
[19:48:13] <PCW> well if you have a valid Bridge EEPROM config+CRC yes
[19:48:25] <furrywolf> the manual says all it does is prevent the bridge from reading its settings, nothing to do with the fpga...
[19:48:40] <furrywolf> bbl, got to head back to work. someone got a flat and needs help.
[19:48:41] <Tom_itx> leave W2 down during recover?
[19:49:13] <PCW> it really does not matter, it only matters if the FPGA does not load
[19:49:35] <Tom_itx> oh those are just pullups
[19:49:58] <Tom_itx> now, do i use the 5i25 for the --recover?
[19:50:06] <Tom_itx> micges told me to do that
[19:51:25] <PCW> yeah something lke
[19:51:27] <PCW> sudo mesaflash --device 6i24 --recover bitfilename
[19:51:43] <Tom_itx> only he said to use --device 5i25
[19:52:01] <Tom_itx> so i need a good bitfile to put in it's place?
[19:52:02] <PCW> I dont think so
[19:52:22] <PCW> should be 6i24
[19:52:30] <Tom_itx> i'll try that first
[19:52:41] <Tom_itx> i need a good bitfile now it seems
[19:53:11] <Tom_itx> is the bitfile on the 6i24 quite a bit bigger than the 7i90?
[19:53:21] <Tom_itx> like 700k compared to 300k
[19:55:38] <Tom_itx> no 6I24 boad found
[19:55:41] <furrywolf> actually, still have 10mins before I have to go.
[19:55:47] <Tom_itx> no 5I24 board found
[19:57:50] <Tom_itx> PCI device 6I25 (RECOVER) at 0000:01:00.0
[19:58:26] <Tom_itx> the help says 6i25 only for --recover
[20:01:25] <PCW> so thats a mesaflash bug
[20:01:37] <Tom_itx> well he told me about that
[20:01:44] <Tom_itx> he said it was ok to use it
[20:04:54] <Tom_itx> so once i run --recover then what?
[20:05:00] <Tom_itx> didn't seem to do much
[20:05:40] <PCW> it did not program a new bitfile?
[20:05:47] <Tom_itx> no
[20:06:03] <Tom_itx> should i try writing to it?
[20:06:36] <PCW> maybe its
[20:06:38] <PCW> sudo mesaflash --device 6i25 --recover --write bitfilename
[20:06:44] <Tom_itx> i'll try that
[20:07:15] <Tom_itx> aarg
[20:07:19] <Tom_itx> bug
[20:07:29] <Tom_itx> wrong bitfile for destination device
[20:07:51] <PCW> well thats not a bug, its correct
[20:07:53] <Tom_itx> says it's for a g256 instead of g144 which is right
[20:08:06] <Tom_itx> but the recover won't work on this then as it is
[20:08:30] <Tom_itx> and i get no 5i24 board found
[20:08:31] <Tom_itx> otherwise
[20:09:26] <PCW> --device 6I24 is the proper incantation but looks like mesaflash doen't recognize it yet
[20:09:48] <PCW> are you using the latest mesaflash?
[20:09:56] <Tom_itx> yep
[20:10:02] <Tom_itx> just got it from his git
[20:10:16] <PCW> well look like it needs some work on the 6I24
[20:10:49] <Tom_itx> i wonder if powercycle would do anything?
[20:10:58] <Tom_itx> since i did the recover with the 6k25
[20:11:02] <Tom_itx> i*
[20:17:17] <PCW> probably need JTAG until mesaflash is fixed (or use my DOS tool)
[20:18:10] <Tom_itx> i've got one coming
[20:18:10] <Jymmm> DOS Tool?
[20:18:24] <Tom_itx> i'll hit you up when it gets here
[20:18:32] <Tom_itx> do i need to reload the firmware?
[20:18:36] <Jymmm> http://voipfan.net/unlock/images/jtag_schematic.png
[20:18:57] <Tom_itx> what dos dool?
[20:19:06] <Tom_itx> tool*
[20:19:53] <Tom_itx> if i need to boot in dos, i don't think this pc will
[20:20:11] <Tom_itx> i've got win7 on a disk for it
[20:22:00] <Tom_itx> nmflash?
[20:22:05] <PCW> which computer? (the J1800 I have boots DOS fine)
[20:22:13] <Tom_itx> J1900
[20:22:29] <Tom_itx> q1900m pro3
[20:22:37] <PCW> Almost all BIOSes will boot DOS
[20:22:54] <Tom_itx> i've got a bootable cd it won't boot from
[20:23:03] <Tom_itx> no thumbdrive with dos on it
[20:23:44] <Tom_itx> will it work in a shell?
[20:23:51] <PCW> (its still used for flash utilities on many)
[20:23:53] <PCW> _but_ the DOS PCI memory access utilities only work on some CPUs
[20:24:12] <PCW> freeby.mesanet.com/SMFLASH.EXE
[20:25:25] <PCW> but maybe SMFLASH will work because it only uses PCI config space access which should always work
[20:26:01] <Jymmm> http://www.bootdisk.com/bootdisk.htm
[20:27:31] <PCW> I had to make a bootable DOS USB drive to flash the Gigabyte J1800s BIOS
[20:28:00] <Jymmm> http://hackipedia.org/Platform/3D0/html,%20JTAG/html,%20software/JTAGFAQ.html
[20:28:44] <PCW> JTAG is that hard way around so best avoided if possible
[20:31:27] <Tom_itx> i'm all for that
[20:31:41] <PCW> (that JTAG interface will not work with Xilinx tools anyway)
[20:31:56] <Tom_itx> oh?
[20:32:25] <PCW> needs to match Xilinx's hardware
[20:32:54] <Tom_itx> they claim it will...
[20:33:12] <Tom_itx> but that's a chinese claim :)
[20:33:31] <PCW> (the one Jymm linked to)
[20:33:37] <Tom_itx> oh
[20:33:50] <Jymmm> ah
[20:33:54] <Tom_itx> i'll boot win7 and see what it does
[20:34:09] <PCW> every one uses different pins
[20:34:26] <PCW> SMFLASH needs DOS
[20:37:30] <Tom_itx> ok it booted the dos cd but that doesn'
[20:37:33] <Tom_itx> t help
[20:37:41] <Tom_itx> since the utility isn't on it
[20:39:20] <Tom_itx> i'll see what i can come up with
[20:46:38] <dirty_d> i freaking hate eagle
[20:48:31] <Tom_itx> PCW i have a dos prompt with smflash there now
[20:49:02] <Tom_itx> oh crap i need a config file too :D
[20:51:00] <Tom_itx> i copied justio and fallback
[20:53:13] <dirty_d> therse gotta be an easier way to design simple pcbs
[20:53:55] <dirty_d> i dont understand why it cant be as simple as "i want a diode symbol in the schematic, and a 0805 footprint associated with it"
[20:54:06] <dirty_d> but nooooo, i have to go designed an entire new part
[20:56:06] <dirty_d> hmm
http://www.digikey.com/schemeit/
[20:56:33] <_methods> why would you need to make an 0805 diode?
[20:57:03] <_methods> there are so many libraries for eagle not sure why you would need to make anything
[20:58:59] <Tom_itx> well you still do
[20:59:07] <PCW> bbl
[20:59:15] <Tom_itx> PCW it still won't boot
[20:59:25] <Tom_itx> i did the dos copy config thing
[20:59:33] <Tom_itx> and linux still hangs
[21:00:12] <PCW> so SMflash worked and you have LEDS off?
[21:00:43] <Tom_itx> i didn't check the leds
[21:00:48] <Tom_itx> one sec
[21:01:03] <dirty_d> _methods, but there isnt a single 0805 diode in eagle, lol
[21:01:17] <Tom_itx> leds still on
[21:01:19] <dirty_d> the diode i just happened to choose from its properties is in 0805
[21:01:28] <Tom_itx> but it's booting now
[21:01:40] <PCW> SMflash was happy?
[21:01:50] <Tom_itx> appeared to bt
[21:01:52] <Tom_itx> be
[21:01:57] <PCW> correct bit file size?
[21:02:00] <Tom_itx> it w w w w w a bunch
[21:02:10] <Tom_itx> i pulled the justio one
[21:02:17] <Tom_itx> and used it 16_justio
[21:02:18] <PCW> (not sure if thats a -16 or -25 card)
[21:02:24] <Tom_itx> it's a 16
[21:02:30] <Tom_itx> i checked the chip
[21:02:55] <Tom_itx> XC6SLX16
[21:03:10] <Tom_itx> FG256DIV1325
[21:03:11] <PCW> well if smflash did not succeed (you could try the -V option) you are still stuck
[21:03:42] <Tom_itx> checking mesaflash in linux now
[21:03:47] <PCW> (you of course need a power cycle to load the new EEPROM content)
[21:03:52] <Tom_itx> yep
[21:04:33] <Tom_itx> no 5i24 board found
[21:04:34] <PCW> well if the LEDs dont go out at power up, there's not much sense in proceeding
[21:04:50] <Tom_itx> both are on
[21:04:55] <Tom_itx> red/amber
[21:05:00] <PCW> no config
[21:05:23] <Tom_itx> so they both need to go out once powered?
[21:05:29] <PCW> yes
[21:05:37] <Tom_itx> i'll fiddle with it a bit
[21:05:45] <Tom_itx> are there options under smflash?
[21:06:20] <PCW> just verify
[21:06:25] <Tom_itx> ok
[21:06:31] <PCW> (and maybe fallback)
[21:06:39] <Tom_itx> -f ?
[21:06:43] <PCW> type smflash by itself
[21:06:55] <PCW> really bbl
[21:07:03] <Tom_itx> ok thanks
[21:17:48] <Tom_itx> v returned 00 00 00....
[22:02:10] <Tom_itx> must be jtag time
[22:06:27] <furrywolf> put the eu3000is all back together... plastics and everything. seems to be running well. I might need to adjust the valves again, but that project was really pissing me off. I'll also have to take the front plastic off when the battery for it gets here.
[22:08:49] <furrywolf> I learned today that the low oil shutdown doesn't work properly if it has no battery. it's supposed to latch until you turn the key off, but apparantly that doesn't work without standby power. instead it'd trip, the engine would cut out, until the rpms dropped low enough for the power output to shut down, then it'd reset the low oil cutoff, turn spark back on, speed back up...
[22:09:50] <furrywolf> it wasn't actually out of oil - it came with one of the brackets with the rubber feet missing, so it was sitting at an angle away from the sensor.
[22:30:29] <Tom_itx> right config was selected to build the file.. work.i24_x16card.all
[22:30:41] <Tom_itx> 72 io bitfile which is right..
[22:30:48] <Tom_itx> not sure what went wrong
[22:32:06] <Tom_itx> looks like it built for a _25 card though looking at the file size
[22:36:08] <Tom_itx> i bet that was the problem... looking at the project file i see i24_x25card loaded instead of i24_16card
[22:36:15] <Tom_itx> that's what borked it
[22:37:44] <Tom_itx> but it says i24_16card is already in the project file.
[22:37:46] <Tom_itx> hmm
[22:38:32] <Tom_itx> and it was selected in the top file
[22:38:37] <Tom_itx> hmm
[22:38:52] <Tom_itx> it should have build right
[22:40:39] <Tom_itx> i'll build the justio one and see what size the file is
[22:44:10] <pcw_home> check what chip is associated with the project
[22:46:19] <pcw_home> bit file size is ~460k for -16 cards
[22:49:07] <Tom_itx> yeah it was 700k i'm sure
[22:49:14] <Tom_itx> that's what went wrong
[22:50:17] <Tom_itx> something is set wrong because the justio one is 783k too
[22:50:26] <Tom_itx> just finished compiling
[22:51:06] <Tom_itx> fivei24.xise file selected
[22:51:40] <Tom_itx> use work.i24_x16card.all
[22:52:04] <Tom_itx> and a 72pin vhd file for the bitfile
[22:52:35] <Tom_itx> work.PIN_JUSTIO_72.all
[22:52:46] <Tom_itx> which all looks right to me
[22:53:26] <Tom_itx> oh i see now
[22:54:05] <Tom_itx> just under the fivei24, xc6slx25-2ftg256
[22:54:08] <Tom_itx> that's the problem
[22:54:25] <Tom_itx> where do i get a fivei24 project with the x16?
[22:56:18] <Tom_itx> seems all the fivei24.xise are 25
[22:56:31] <pcw_home> i just change the chip properties but the projects could be split
[22:57:16] <pcw_home> (did you use -25 bitfiles with smflash?)
[22:57:31] <Tom_itx> no
[22:57:40] <Tom_itx> i made sure they were 16
[22:58:01] <Tom_itx> i could save this project as a fivei24-16 i suppose
[22:58:12] <Tom_itx> just change the target chip?
[22:58:29] <Tom_itx> xc6slx16?
[22:59:25] <pcw_home> check the file size (if smflash can read the EEPROM size correctly it should be able to do everything else)
[23:00:19] <Tom_itx> it failed to write it with the dos utility
[23:00:40] <Tom_itx> it said it was but verify failed
[23:02:46] <Tom_itx> early day tomorrow, i'll pick it up again tomorrow PM
[23:03:40] <Tom_itx> i'm compiling with the new chip size to check the filesize
[23:08:03] <Tom_itx> 453k, that's more like it
[23:43:57] <treid_> having trouble starting linuxcnc with new mesa hardware. I receive an error: "could not insert module /usr/realtime-3.4-9-rtai-686-pae/modules/linuxcnc/hm2_pci.ko: No such device" any ideas? google isn't helping much
[23:50:53] <pcw_home> the kernel log may help
[23:52:29] <pcw_home> so if you clear the log:
[23:52:31] <pcw_home> sudo dmesg -c
[23:52:32] <pcw_home> start linuxcnc
[23:52:34] <pcw_home> and then paste the log somewhere public
[23:52:53] <treid__> I logged out right as you sent your first response and missed it
[23:54:22] <pcw_home> the kernel log will have a more detailed error message so clear the log, start linuxcnc and then paste the log somewhere
[23:55:07] <treid__> Ok thanks, I'll try that now
[23:57:52] <treid_> Before I try I should mention I'm using a 5i24
[23:58:38] <treid_> I tested with both the 5i23 sample config and a 5i25 config I made with pncconf, changing replacing all "5i25" with "5i24" in the ini file
[23:59:12] <treid_> if that is helpful
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
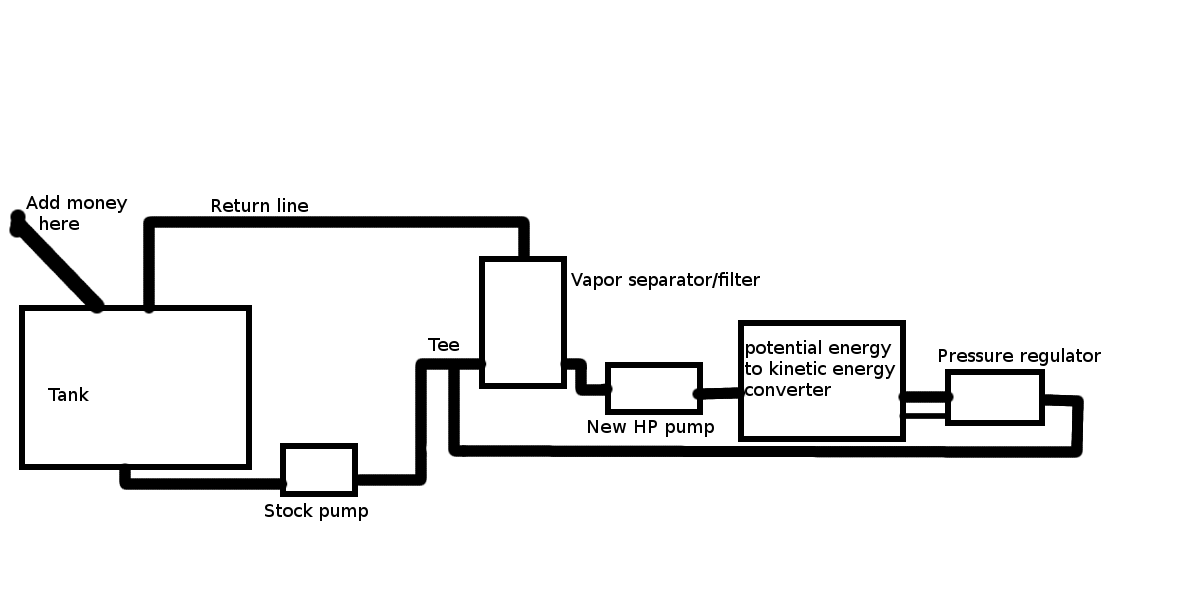{kind=link}
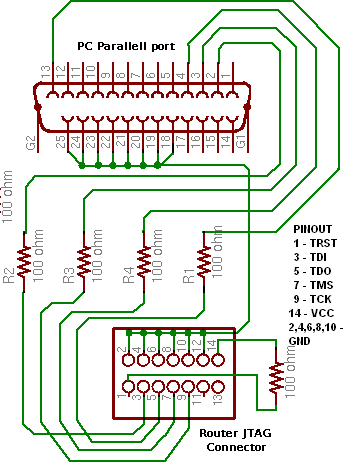{kind=link}