Back
[00:01:02] <pcw_home> Not sure, I haven't tuned a velocity loop for a while
[00:01:57] <Tom_itx> me either and never with lcnc
[00:04:20] <zeeshan> put random numbers
[00:04:21] <zeeshan> :D
[00:05:43] <Tom_itx> i'll do a bit of reading first
[00:05:48] <zeeshan> https://controls.engin.umich.edu/wiki/index.php/PIDTuningClassical
[00:05:50] <zeeshan> just follow that
[00:05:52] <zeeshan> when in doubt
[00:08:26] <pcw_home> The pwmgen will be scaled in RPM as will the commanded speed but the feedback speed needs to be scaled
[00:09:32] <pcw_home> (since encoder velocity output will be scaled in RPS not RPM)
[00:10:12] <pcw_home> so a scale component with a scale factor set to 60 is needed
[00:10:25] <Tom_itx> i may already have one i can use
[00:10:46] <Tom_itx> since i'm displaying the rpm
[00:11:46] <pcw_home> yeah re-use that one
[00:13:44] <Tom_itx> oh...
[00:13:58] <Tom_itx> how does pid work when you give it an M4?
[00:14:15] <zeeshan> http://www.amazon.com/Soondar%C2%AE-Powered-Thermometer-Temperature-Sensor/dp/B0054U4YKI/ref=cm_cr_pr_pdt_img_top?ie=UTF8
[00:14:16] <zeeshan> hmm
[00:14:19] <Tom_itx> are they unsigned?
[00:14:20] <zeeshan> i wonder if i can use this to datalog temp
[00:14:42] <pcw_home> yes they are signed
[00:15:05] <Tom_itx> won't that screw up the PID loop?
[00:15:36] <pcw_home> ( well motion now has signed and unsigned spindle outputs )
[00:15:42] <Tom_itx> this isn't because i need it btw... it's a learning exercise
[00:16:11] <pcw_home> encoder velocity is signed...
[00:16:29] <Tom_itx> that helps
[00:17:49] <Tom_itx> i've had enough for one day..
[00:18:16] <pcw_home> because of the delay between forward and reverse funny thing may happen at very slow speeds
[00:18:28] <pcw_home> funny things
[00:18:58] <pcw_home> so probably better to not set very slow spindle speeds
[00:19:01] <Tom_itx> because of my inhibit?
[00:19:17] <Tom_itx> i can't set anything below S250 or so
[00:19:50] <Tom_itx> and the result is around 90 rpm
[00:20:02] <Tom_itx> on the high end, it's alot closer
[00:20:13] <pcw_home> yeah because of the PID gain you might get a reverse PID/DIR output even for a forward direction
[00:20:43] <pcw_home> probably setting off an oscillation
[00:21:32] <pcw_home> ( you will undoubtedly find out )
[00:21:50] <Tom_itx> i'm sure
[00:22:10] <pcw_home> anyway
[00:22:12] <pcw_home> 'nite sleepy time.... . . . . . .
[00:22:20] <Tom_itx> same here.. later
[02:16:03] <Deejay> moin
[02:16:11] <XXCoder1> yo
[07:34:48] <jthornton> it appears the facing G code generator in my Mill G code generator is done
[07:47:45] <jthornton> spoke too soon the first pass is not right
[08:13:09] <quitte_> Hi. Is the live build configuration for the 2.6 is available somewhere?
[08:13:43] <quitte_> I have this 1G cf card and would like to fit everything in there and then run from ram.
[08:14:57] <jthornton> dunno what you mean by "live build configuration"?
[08:15:23] <jthornton> the cd iso is on the main web site
[08:15:35] <quitte_> jthornton: debian live images are built by running a tool on a configuration directory
[08:18:49] <jthornton> the debian live cd is on the download page
[08:19:25] <quitte_> jthornton: who built the live image?
[08:19:45] <jthornton> dunno
[08:19:49] <jthornton> why
[08:20:28] <quitte_> because they have the configuration
[08:20:55] <jthornton> you might ask on the #linuxcnc-devel channel
[08:21:23] <quitte_> okay. thanks
[09:30:44] <Gurwinder_> Is LinuxCNC work on Ubuntu 14.04?
[09:35:25] <JT-Shop> http://wiki.linuxcnc.org/cgi-bin/wiki.pl?LinuxCNCKnowledgeBase
[09:36:30] <JT-Shop> quitte_, why 14.04?
[09:44:24] <Gurwinder_> My system in Ubuntu 14.04, just try to install on it. Ok, am going for ubuntu 10.04.
[09:57:47] <JT-Shop> http://www.linuxcnc.org/index.php/english/forum/9-installing-linuxcnc/29122-ubuntu-1404-or-peppermint
[10:04:11] <pcw_home> I'm running linuxcnc on 14.04, its pretty easy with 2.7/Preemt-RT
[10:04:12] <pcw_home> but probably not suited to parallel port interfaces due to Preemt-RTs' greater latency
[10:08:02] <JT-Shop> what does the RT-Preempt kernel do vs the normal one?
[10:10:00] <pcw_home> well there are three common free linux real time kernels , RTAI, Xenomai and Preemt-RT
[10:10:02] <pcw_home> all have somewhat different real time characteristics but in most cases the order above is from least to most jitter
[10:11:37] <pcw_home> For example the system I am on has about 15 usec of jitter running RTAI but about 32 usec running Preemt-RT
[10:12:33] <zeeshan> pcw_home: a little while ago i briefly remember you guys talking about issues with q1900 by asrock
[10:12:38] <zeeshan> are those issues resolved? :P
[10:12:55] <JT-Shop> pcw_home, thanks
[10:13:21] <pcw_home> Yeah there were USB issues with the first Wheezy ISO and Baytrail CPUs (J1800,1900 etc)
[10:13:51] <zeeshan> im finally getting the 1900
[10:13:58] <zeeshan> when i install the new live cd
[10:14:03] <zeeshan> will i go through the same issues? :P
[10:14:09] <pcw_home> those are fixed (and have com back with newer CPUs)
[10:14:49] <pcw_home> No, the current ISO will boot on a AsRrock J1900
[10:16:44] <zeeshan> sweet
[10:16:54] <pcw_home> The current Wheezy ISO will not boot on newer CPUs like the 2957U in the HP stream mini
[10:17:26] <pcw_home> http://store.hp.com/webapp/wcs/stores/servlet/us/en/pdp/desktops/hp-stream-mini-desktop---200-010-p-k5g59aa-aba--1
[10:17:52] <pcw_home> but Ubuntu 14.04 will (as will Jessie)
[10:19:19] <zeeshan> okay so basically run 14.04 vs debian
[10:20:14] <pcw_home> If you want to futz about, but easiest is to just run the Wheezy ISO
[10:21:16] <pcw_home> unless you need a newer kernel for some reason (like new hardware not supported by the 3.4.9 kernel that comes with the ISO)
[10:25:48] <Tom_itx> zeeshan which one you gettin?
[10:25:55] <zeeshan> asrock q1900b
[10:26:06] <Tom_itx> is that the itx?
[10:26:08] <zeeshan> tired of using that milkl computer
[10:26:14] <zeeshan> mill computer that is slow as shit
[10:26:14] <Tom_itx> i've got one of eacy
[10:26:20] <Tom_itx> h
[10:26:24] <zeeshan> yes itx
[10:26:43] <zeeshan> http://www.canadacomputers.com/product_info.php?cPath=26_706&item_id=073432
[10:26:47] <Tom_itx> this is the b i'm on currently
[10:27:04] <zeeshan> is it quick?
[10:27:20] <Tom_itx> better than the 525
[10:27:35] <zeeshan> give you an example
[10:27:37] <Tom_itx> it's crashed 7 a time or two
[10:27:39] <zeeshan> if youve got linuxcnc open
[10:27:50] <zeeshan> and open up a web brwoser to go to a website to download some code for example
[10:27:58] <zeeshan> does the web browser lag like crazy?
[10:28:05] <Tom_itx> i briefly ran 10.04 on it but both have 7 on them currently
[10:28:09] <zeeshan> ah
[10:28:11] <Tom_itx> no
[10:28:14] <Tom_itx> it's quick
[10:28:27] <zeeshan> my curent comp jams for like 10 seconds
[10:28:30] <zeeshan> before opening the brwoser
[10:28:30] <zeeshan> haha
[10:28:33] <Tom_itx> that's one reason i'm using it on 7 right now
[10:28:36] * zeeshan can't type today
[10:28:58] <Tom_itx> quick is a relative term...
[10:29:02] <zeeshan> i really hope it's a smooth transition
[10:29:11] <Tom_itx> compared to the one it replace it's on fire
[10:29:14] <zeeshan> ill back up my HD. install all the new stuff
[10:29:16] <zeeshan> and copy over my configs
[10:29:57] <Tom_itx> i pulled my 10.04 off the 525 and plugged it right into the asrock board just fine
[10:29:57] <zeeshan> i just need to order a stick of ram
[10:30:01] <zeeshan> and the mobo yes?
[10:30:14] <Tom_itx> i got 2 ram
[10:30:26] <Tom_itx> that's about it unless you need a dvd
[10:30:27] <zeeshan> i dont think it needs more than 4gb
[10:30:31] <zeeshan> its my mill comp
[10:30:35] <Tom_itx> so?
[10:30:49] <Tom_itx> ram is cheap
[10:30:55] <zeeshan> i only use it to open web browser and stuff :P
[10:31:02] <zeeshan> for the longest time, my cad comp had 4gb
[10:31:52] <Tom_itx> i got 8 in each of these
[10:32:18] <Tom_itx> newegg had a mail in rebate a while back
[10:32:21] <Tom_itx> for 10 off
[10:32:34] <zeeshan> i really dislike mir
[10:32:43] <zeeshan> they send you one of those stupid prepaid visa cards
[10:32:49] <Tom_itx> i didn't mail mine
[10:33:51] <Tom_itx> i might stick this on the mill once i get the mill all ironed out
[10:33:57] <Tom_itx> it's gettin close now
[10:34:01] <zeeshan> can you mix and match ram
[10:34:10] <Tom_itx> i dunno
[10:34:12] <zeeshan> like have one stick of ddr3 1333 and another stick of 1600
[10:34:21] <archivist> depends!
[10:34:30] <zeeshan> on
[10:34:32] <archivist> see your board docs
[10:34:33] <Tom_itx> i never have tried
[10:34:43] <Tom_itx> it's supposed to i think
[10:34:49] <archivist> some channels have to match
[10:37:07] <zeeshan> "you may install varying memory sizes in channel a and channel b. the system maps the total size of the lower sized channel for dual channel config. any excess memory from the higher sized channel is then mapped from single channel operation"
[10:37:09] <zeeshan> whatever that means
[10:37:10] <zeeshan> haha
[10:37:18] <Tom_itx> http://www.asrock.com/mb/Intel/Q1900B-ITX/
[10:37:30] <zeeshan> i need more ram for my own desktop
[10:43:38] <zeeshan> okay i think ill do this
[10:43:57] <zeeshan> ill move the 2 sticks of ddr3 1333 ram from my desktop to the asrock
[10:44:09] <zeeshan> and buy 2 larger dimms for the desktop
[10:44:13] <zeeshan> 2 8gbs
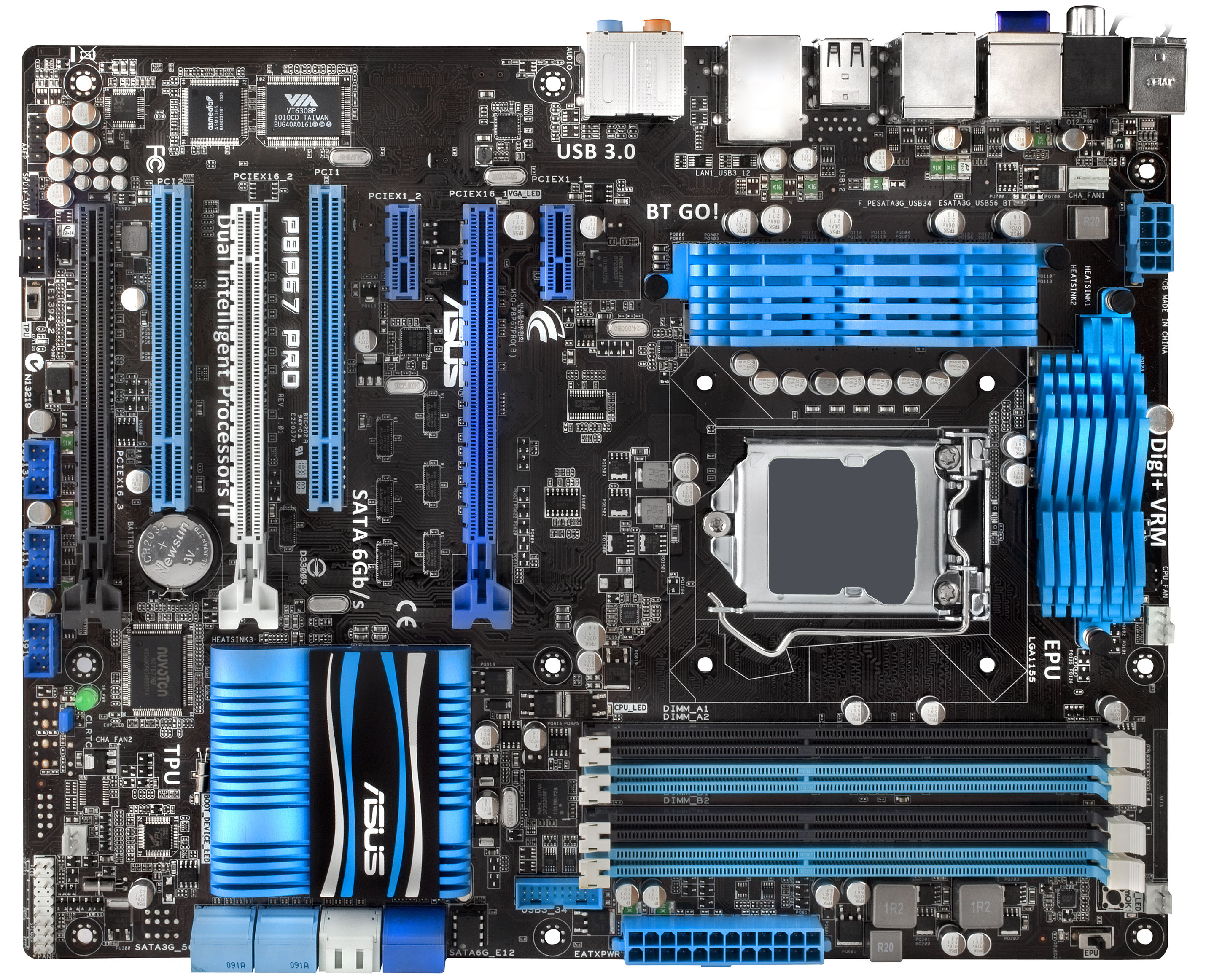
[10:44:38] <zeeshan> i dunno why the dimm slots look so small on the q1900b :P
[10:45:00] <zeeshan> http://images.bjorn3d.com/Material/revimages/articles/Asus%20P67%20preview%20article/P8P67%20Pro/P8P67%20PRO_2D_H_x.jpg
[10:45:06] <zeeshan> thats the ram slots on my current desktop
[10:45:08] <MarkusBec> the q1900b used low voltage laptop ram
[10:45:13] <zeeshan> ah
[10:45:14] <zeeshan> thats why
[10:45:54] <MarkusBec> there is a version with sodimm
[10:46:07] <pcw_home> If you want a fast inexpensive linuxcnc system
[10:46:08] <pcw_home> http://www.newegg.com/Product/Product.aspx?Item=N82E16813157511
[10:46:10] <pcw_home> + a G3258 is quite nice
[10:46:25] <zeeshan> i need db9
[10:47:34] <MarkusBec> zeeshan: ASRock Q1900M
[10:47:55] <MarkusBec> ASRock Q1900M Pro3
[10:48:12] <MarkusBec> Gigabyte GA-J1900M
[10:48:28] <zeeshan> sweet
[10:48:33] <zeeshan> that looks like the right ram slot
[10:49:28] <pcw_home> many have a 10 pin COM port header (a DB( is pretty rare nowadays)
[10:49:35] <pcw_home> DB9
[10:49:51] <zeeshan> http://www.newegg.ca/Product/Product.aspx?Item=N82E16813157565
[10:49:53] <zeeshan> this looks perfect
[10:50:46] <pcw_home> yeah if you dont need MiniITX you get a lot more options
[10:51:00] <zeeshan> i have enough space for regular atx
[10:51:11] <zeeshan> i think thats what my current board is
[10:52:05] <zeeshan> http://c4.staticflickr.com/8/7410/16272562198_ddb3410cbd_h.jpg
[10:52:09] <zeeshan> looks like regular atx? :)
[10:53:14] <pcw_home> I was thinking wow those prices have increased but that's CA
[10:53:44] <pcw_home> Yeah that looks like full ATX
[11:01:07] <MarkusBec> ah with the q1900
[11:01:25] <MarkusBec> you need a display with dvi/hdmi
[11:03:58] <pcw_home> I think almost all the J1800/J1900 MBs have VGA/HDMI
[11:04:25] <pcw_home> unlike my tupperware PC
[11:11:04] <zeeshan> that has a vga port in it
[11:11:13] <zeeshan> the pro3
[11:11:42] <Tom_itx> zeeshan the other version uses regular ram
[11:11:57] <zeeshan> http://www.newegg.ca/Product/Product.aspx?Item=N82E16813157565
[11:12:03] <zeeshan> thats the board i ordered
[11:12:07] <zeeshan> TOO LATE!!@
[11:12:12] <Tom_itx> zeeshan, i've got the q1900m pro3 and the q1900b itx
[11:12:23] <zeeshan> er
[11:12:24] <zeeshan> that isnt th eboard
[11:12:30] <Tom_itx> hahaha
[11:12:44] <zeeshan> making me open my invoice
[11:12:50] <pcw_home> Even has a DB9 COM1
[11:12:56] <zeeshan> sorry that is the board.
[11:13:03] <zeeshan> db9, db25, regular ram
[11:13:13] <zeeshan> pci slots for 5i25
[11:13:18] <Tom_itx> yep, i've got one of those
[11:13:21] <pcw_home> Probably made for POS terms etc
[11:13:39] <Tom_itx> oh hell, that's canuck price..
[11:13:46] <zeeshan> canukistan dollar is down
[11:13:46] <zeeshan> ;[
[11:13:53] <zeeshan> but jobs are pay $$$$$$$$4
[11:13:53] <pcw_home> drop in upgrade/replacement of older MBs
[11:13:56] <Tom_itx> i paid a little more than half that
[11:13:59] <zeeshan> cause we're exporting a lot to usa now
[11:14:23] <pcw_home> Yeah I thinks its $62 in the good old USA
[11:14:31] <Tom_itx> yeah we're waiting to pull the drain plug on your oil too
[11:14:47] <zeeshan> i can tell its a good market right now
[11:14:50] * JT-Shop mildly wonders why all cameras have a DCIM directory
[11:14:51] <zeeshan> is because i keep getting a lot of car work
[11:15:17] <zeeshan> (race car) -- people spend more money on them when they have money! :P
[11:15:20] <Tom_itx> http://www.newegg.com/Product/ProductList.aspx?Submit=ENE&DEPA=0&Order=BESTMATCH&Description=q1900m+pro3&N=-1&isNodeId=1
[11:15:23] <Tom_itx> not that much different
[11:15:41] <zeeshan> well if you do the conversion and shippingf
[11:15:53] <zeeshan> and brokerage, and bullshit its prolly the same price
[11:15:56] <Tom_itx> i think it went up since i got mine
[11:16:30] <Tom_itx> i know the case i got for the d525 i tried to get and it doubled
[11:17:05] <Tom_itx> they're keeping it on their shelf for me
[11:17:39] <pcw_home> I find the D525s painfully slow
[11:17:45] <Tom_itx> zeeshan, i've bluescreened 7 half dozen times with that board
[11:19:48] <zeeshan> thats not goodf :p
[11:22:58] <Tom_itx> JT-Shop, file system management for cameras
http://en.wikipedia.org/wiki/Design_rule_for_Camera_File_system
[11:32:23] <JT-Shop> there you go
[11:36:39] <zeeshan> whats a cheap material i can bend
[11:36:42] <zeeshan> at is 5/8" thick
[11:36:50] <zeeshan> that i can get in a 6"x12" piece :p
[11:36:56] <zeeshan> i cant use wood cause i gotta bend it
[11:37:12] <zeeshan> maybe i can even get away with 1/4" for now
[11:37:37] <Tom_itx> plexi
[11:37:45] <zeeshan> heat to bend? :p
[11:37:47] <Tom_itx> yes
[11:37:48] <pcw_home> Yeah PLexiglass
[11:37:53] <Tom_itx> they make heat strips for it
[11:38:00] <zeeshan> just regular heat gun?
[11:38:02] <Tom_itx> i heat a steel rod and lay it over it
[11:38:03] <zeeshan> ive bent lexan before
[11:38:06] <zeeshan> never plexi
[11:38:16] <zeeshan> do you get that feel
[11:38:22] <zeeshan> where it feels pliable and not glassable
[11:38:26] <zeeshan> if you know what i mean :P
[11:39:07] <Tom_itx> sorta, i haven't done that much of it
[11:39:51] <Tom_itx> http://tom-itx.no-ip.biz:81/~webpage/sumo_files/sumo_chassis_index.php
[11:39:58] <Tom_itx> i did it with that
[11:40:10] <zeeshan> hmm
[11:40:18] <zeeshan> how thick is that? looks like 3/16
[11:40:27] <Tom_itx> probably 1/8"
[11:40:51] <Tom_itx> you may need to heat both sides of 5/8
[11:43:13] <zeeshan> Tom_itx: i was wanting to ask you this a while back
[11:43:24] <zeeshan> in steel how much skin do you leave and in aluminuim how much
[11:43:35] <zeeshan> when you're doing a 2d shape on the mill out of a chunk of metal
[11:43:42] <zeeshan> and you want to manually rip it out?
[11:44:04] <zeeshan> ive been doing .015" for al, and i have to go around with a chisel to get it out
[11:44:06] <JT-Shop> lexan you can bend cold
[11:44:19] <zeeshan> JT-Shop: its easier to form a rear window of a car with heat
[11:44:20] <Tom_itx> .015 is a bit much
[11:44:30] <zeeshan> Tom_itx: what did you typically leave?
[11:44:36] <Tom_itx> .005 would hold it probably
[11:44:46] <zeeshan> ok ill sneak up to that number :P
[11:44:47] <Tom_itx> i can't because my table isn't completely flat
[11:45:01] <Tom_itx> you should just be able to pop the part out
[11:45:12] <Tom_itx> no jack hammer required
[11:45:15] <zeeshan> haha
[11:45:42] <JT-Shop> http://gnipsel.com/images/GL1800/
[11:46:06] <Tom_itx> fancy
[11:46:28] <zeeshan> the question is
[11:46:31] <zeeshan> whats in the tote? :D
[11:46:39] <JT-Shop> just need to clean the steel bits and powder coat them
[11:46:44] <JT-Shop> air
[11:46:59] <zeeshan> im digging the gusset with the holes
[11:47:02] <zeeshan> looks sexy
[11:47:07] <zeeshan> is that just angle around?
[11:47:11] <zeeshan> angle iron
[11:47:23] <zeeshan> or did you take plate and bend it after machining
[11:47:23] <JT-Shop> no, it is 11ga HR sheet
[11:47:46] <JT-Shop> no machining except for the drilled holes and yes I bent it after
[11:47:56] <JT-Shop> cut out on my plasma cutter
[11:48:09] <zeeshan> looks nice :D
[11:48:13] <JT-Shop> thanks
[11:48:31] <JT-Shop> nap time
[11:48:58] * Tom_itx checks his Mickey Mouse watch
[12:15:26] <Loetmichel> sooo... *phew* 50cc bike runs again. only had to push her 150ft or so, then she ignited... surprises me a bit because she had been in the garage for half a year... anyways, taking miracles as they come, now i can commute to work tomorrow ;-)
[12:25:11] <Jymmm> Loetmichel: how far is work from home?
[12:27:29] <Loetmichel> 12km
[12:28:03] <Jymmm> traffic bad?
[12:29:16] <Loetmichel> no, car in the body shop
[12:29:22] <Jymmm> ah
[12:34:16] <furrywolf> who only has one car? :)
[12:35:17] <Loetmichel> furrywolf: the other car is my wifes company car...
[12:35:24] <Loetmichel> and she is back from america
[12:35:29] <Loetmichel> ... so i cant have that
[12:35:41] <Loetmichel> body shop promised to be done saturday...
[12:35:49] <Loetmichel> ... he isnt.
[12:36:45] <furrywolf> pick up another vehicle? :)
[12:37:12] <Loetmichel> do i look like rockefeller?
[12:37:25] <furrywolf> most of mine are even roadworthy! truck has marginal brakes, one of the subarus has no exhaust past the cats, but that's minor details...
[12:37:34] <Jymmm> Loetmichel: With all those mods... Yes, yes you do =)
[12:37:48] <furrywolf> hrmm, you must live somewhere where vehicles are expensive.
[12:38:02] <Loetmichel> furrywolf: germany
[12:38:17] <Loetmichel> "roadworthy" is defined a little bit different here
[12:38:18] <furrywolf> it's pretty easy to pick up a sub-$500 vehicle here. I saw two good ones on craigslist free yesterday, needing less than a day of repairs...
[12:41:08] <Jymmm> furrywolf: But you live in the boonies. Not everyone has access to 40 acres of parking every dumptruck they find for $20 =)
[12:41:11] <furrywolf> http://humboldt.craigslist.org/cto/5007111006.html that's probably the best $500 car on craigslist right now. head gasket is easy.
[12:41:22] <furrywolf> (on the local craigslist)
[12:42:00] <Loetmichel> furrywolf: i repeat: germany...
[12:42:18] <furrywolf> so I take it cars are more expensive in germany? lol
[12:44:45] <Loetmichel> furrywolf: the german "tuev" has a strange definition of "roadworthy"
[12:45:17] <Loetmichel> you seldomly find a car that has more than a few weeks to the next "annual" left for less than 1000 eur
[12:45:37] <Loetmichel> tuev does the annual here
[12:46:07] <Loetmichel> and they can invalidate your license plate if they think the car isnt roadworhty
[12:46:21] <Loetmichel> and they do if so much as a single license plate light is not working
[12:47:14] <malcom2073> It's the same way in some states in the USA, but varies per state. Here it's like that, yearly inspections, but one state south no safety inspections
[12:48:06] <furrywolf> here they have to pass smog when you buy them, then after that as long as you don't piss any cops off too much, you can drive just about anything.
[12:48:19] <Loetmichel> malcom2073: what i wanted to say: thats the reason you seldomly find cheap used cars here
[12:48:37] <furrywolf> generally you'll only get dinged for broken/missing lights, etc, if you already pissed the cop off for some other reason but he needs something he can put on paper to pull you over for.
[12:48:40] <malcom2073> Yeah, if cars have a fresh inspection, they typically go for a LOT more
[12:48:56] <malcom2073> I'm actually gonna pay for a fresh inspection so it's easier to sell my bike heh
[12:49:49] <furrywolf> there's a guy around here who drives an old chevy truck with no windshield... and tires aren't bad until they stop holding air. :)
[12:50:13] <zoni1983> hi i need suggestion
[12:50:28] <furrywolf> zoni1983: go slow and use lots of lube!
[12:50:38] <furrywolf> (you might want to specify what topic you need a suggestion on...)
[12:50:44] <Loetmichel> furrywolf: german rule on tires: 2mm profile. at the smalles place
[12:51:03] <Loetmichel> or they can and will ticket you.
[12:51:05] <furrywolf> oh sure, we have a legal tread minimum... no one cares.
[12:51:07] <Loetmichel> ant thats not cheap
[12:51:13] <zoni1983> i have yaskawa bldc and mesa 5i20
[12:51:36] <zoni1983> should i use analogue mode or step/ dir
[12:51:52] <Loetmichel> furrywolf: this is GERMANY... you believe omeone "not cares" about rules? especially police?
[12:51:54] <Loetmichel> ;-)
[12:52:11] <furrywolf> my suggestion would be analog mode and let linuxcnc close the loop. much easier timing requirements, easier tuning etc.
[12:52:22] <furrywolf> Loetmichel: lol
[12:52:56] <Loetmichel> btw: thats the bike in question:
http://www.cyrom.org/palbum/main.php?g2_itemId=15295&g2_imageViewsIndex=1
[12:52:59] <zoni1983> is there any tunning required with step/dir
[12:53:00] <furrywolf> pcw is the exert on hooking servos up to mesa boards, but I suspect he'll say the same thing.
[12:53:12] <furrywolf> yes, you have to tune the drive. it probably has pots or something.
[12:53:43] <zoni1983> i also have 7i52s
[12:54:04] <furrywolf> that's only a 50?
[12:54:10] <Loetmichel> furrywolf: it is
[12:54:16] <furrywolf> lame. :P
[12:54:16] <Loetmichel> 50cc 50kmh
[12:54:23] <zoni1983> do i need to tune pid from control
[12:54:33] <zoni1983> emc
[12:54:37] <Loetmichel> i have no bigger drivers license
[12:54:41] <furrywolf> a friend got a free kz550 the other day... 11 times larger. does a LOT more than 50kmh. :P
[12:54:59] <Loetmichel> as i said: i only have a car license
[12:55:19] <Loetmichel> that is allowed up to 50cc 50kmh bikes, too
[12:55:22] <Loetmichel> but not bigger
[12:55:34] <Loetmichel> and a bike license is in excess of 2000 eur here
[12:55:45] <Loetmichel> (~$2200 )
[12:56:09] <furrywolf> yeah, remind me to stay away from germany.
[12:56:18] <Loetmichel> totally not worth it for the few times i drive a bike a year
[12:56:36] <furrywolf> why the hell would you have to pay extra to ride a smaller, cheaper, more efficient vehicle? sounds like excessive government.
[12:56:43] <Loetmichel> as a tourist you can use your american license... for up to a year iirc
[12:57:18] <Loetmichel> but be careful on the autobahns. we drive up to 180 mph there regulary ;-)
[12:57:36] <furrywolf> "if we let them drive bikes, we won't collect nearly as much in fuel taxes... so let's jack up the price of the license to compensate!"
[12:57:44] <Loetmichel> ok, most more like 140mph ;-)
[12:57:53] <furrywolf> I don't know if anything I own goes 140. :P
[12:58:12] <furrywolf> truck goes 65mph if there's absolutely no wind and you're on level ground... sometimes.
[12:58:13] <Loetmichel> my car does
[12:58:19] <Loetmichel> barely ;-)
[12:58:33] <zoni1983> pcw_home: any suggestions
[12:58:46] <Loetmichel> it has a top speed of 230kmh
[12:58:58] <furrywolf> one of my subarus might, but I don't know if it'd be safe at those speeds. I stuffed in a substantially larger engine, but that doesn't help with the aerodynamics of an old station wagon... plus I put a lift kit on it, which probably doesn't help any at high speed either.
[12:58:59] <Loetmichel> and i do that regulary
[12:59:19] <Loetmichel> and it IS allowed on some/many stretches of autobahn ;-)
[12:59:51] <gene78> 2.8.0-pre questions from running on a 2.6.7 config. runs but shows errors about DEFAULT stuff missing
[12:59:51] <Loetmichel> mine is a "kombi", too
[13:00:00] <gene78> Where is the tutorial
[13:00:03] <Loetmichel> http://www.cyrom.org/palbum/main.php?g2_itemId=11969
[13:00:22] <furrywolf> my van... no idea what its top speed is. it's the largest van ford sells, 15 passengers... it's not built for speed. :)
[13:00:27] <Loetmichel> i think that was sold as cadillac catera in usa
[13:00:45] <furrywolf> my other subaru would overrev around 100mph.
[13:00:59] <furrywolf> assuming it even made it there before drag exceeded power.
[13:01:31] <Loetmichel> i was totally surprised that the cruise control locks in at 140mph ;-)
[13:02:19] <Loetmichel> it does gurgle down a lot of fuel at that speed tho
[13:02:51] <furrywolf> heh
[13:02:54] <furrywolf> nothing I own is built for high speed.
[13:03:23] <Loetmichel> at 80mph cruise speed it does 33mpg diesel... at 140mp it does 14mpg ;-)
[13:03:30] <Loetmichel> mph
[13:05:03] <Loetmichel> furrywolf: was the cadillac catera sold as station wagon in USA?
[13:05:44] <Tom_itx> does cadillac even make a station wagon here?
[13:05:57] <Loetmichel> Tom_itx: its an Opel omega
[13:06:09] <Loetmichel> it was only sold as catera in the US
[13:06:17] <Jymmm> Tom_itx: just aluminum can engine blocks
[13:07:08] <Loetmichel> GM thought it would be funny to seel a german "big" car to the US... wasnt the hit i heard ;-)
[13:07:13] <Loetmichel> sell
[13:07:41] <furrywolf> http://static.cargurus.com/images/site/2008/03/26/15/16/1987_subaru_gl-pic-18020.jpeg I own two of those,
http://www.2040-cars.com/_content/cars/images/64/1176764/002.jpg one of those,
http://www.alfaheaven.com/MilitarySection/TZarmy/TZPhotos/M715SdLft.gif and one of those
[13:09:06] <Loetmichel> the bus looks like the "a.team" car ;-)
[13:09:35] <furrywolf> that's not a bus. that's just a van. you have to go larger before we call them busses here. :P
[13:09:52] <Loetmichel> hihi, sorry, habit
[13:10:06] <Loetmichel> because the VW van is called "vwbus" here
[13:10:35] <furrywolf> we call them microbusses here. because they're kinda like a bus, but too small to be useful. (not to mention slow and ugly)
[13:10:38] * Jymmm puts Loetmichel on the short bus
[13:11:01] <Loetmichel> hmmm
[13:11:13] <Loetmichel> what are the mercedes "sprinter" called in the us?
[13:11:15] <furrywolf> as you can see, none of my vehicles were designed for high speeds.
[13:11:19] <furrywolf> sprinter
[13:11:30] <furrywolf> and they're ungodly fucking expensive, so no one owns one.
[13:11:41] <Loetmichel> the go about 110 mph here ;-)
[13:11:50] <Loetmichel> regulary ;-)
[13:12:07] <furrywolf> a van like I pasted sells for about $3000 in excellent condition. a sprinter of the same age, maybe $30,000. no one buys them because of this.
[13:12:22] <Loetmichel> and yes, that IS a nightmare to drive that at that speed, at least when empty
[13:12:31] <furrywolf> I'm sure my van can do 110. it's probably not doing 160. :P
[13:12:40] <Loetmichel> when you hit about 80mp the back axle starts to "swim"
[13:12:57] <furrywolf> freeway traffic here is about 70-75mph
[13:13:29] <furrywolf> too many people who can't fucking work an automobile to drive much faster. heh.
[13:13:40] <Jymmm> IF you come across super cheap hdmi cables, buy them. Cause those damn things are ungawdly expensive
[13:13:44] <Loetmichel> but properly loaded they do 110, even 120 mph perfectly well
[13:14:00] <Loetmichel> they guzzle insane amounts of fuel then , tho ;-)
[13:14:04] <furrywolf> I used to own a bmw 7-series... it was supposed to do 160 or something.
[13:14:13] <furrywolf> I got rid of it. utter shit car.
[13:14:44] <CaptHindsight> in Germany they expect drivers to actually know how to drive, over here anyone can get a license if they can look over the wheel at 16 or >
[13:14:54] <Tom_itx> how come bmw's don't come with a spare?
[13:15:06] <Tom_itx> i hear some don't even have a place for one
[13:15:06] <Loetmichel> furrywolf: my wife owns a bmw x1
[13:15:12] <Loetmichel> that can do 160mph
[13:15:37] <CaptHindsight> flat tires are also not allowed :)
[13:15:38] <Jymmm> Tom_itx: You don't need a spare when you can afford a $1200 tune up
[13:15:42] <Loetmichel> if it wasnt so small and if you would see something out the back it would be a nice car
[13:16:11] <Tom_itx> Jymmm, on a regular basis too...
[13:16:17] <Loetmichel> Tom_itx: they dont need one
[13:16:21] <Jymmm> Tom_itx: Yep.
[13:16:25] <Loetmichel> "runflat" tyres
[13:16:27] <Tom_itx> Loetmichel they do too
[13:16:35] <Tom_itx> runflat don't work
[13:16:42] <Loetmichel> it does
[13:16:44] <Tom_itx> my friend can vouch for that
[13:16:53] <Loetmichel> up to 30mph
[13:17:03] <Loetmichel> i tested it unwillingly
[13:17:08] <Tom_itx> do you do 30mph on the autobahn?
[13:17:18] <Loetmichel> if you have a flat you have to ;-)
[13:17:28] <Tom_itx> and get your arse run over
[13:17:30] <Loetmichel> so its written in the manual
[13:17:51] <Loetmichel> ahem, correction, 80kmh, so 50mph
[13:18:18] <Loetmichel> no, german autobahns are FAST but also more or less disciplined
[13:18:23] <Loetmichel> or it wouldnt work
[13:18:33] <furrywolf> my bmw had a spare
[13:18:43] <Tom_itx> furrywolf older ones did
[13:18:44] <Loetmichel> we have very few accidents here on the autobahns compared to the traffic
[13:19:21] <Loetmichel> furrywolf: newer BMW you can order either with a "instant repair/inflate" set or runflat tyres
[13:19:36] <Loetmichel> they dont even have a PLACE to store a spare any more
[13:19:37] <Jymmm> Loetmichel: How can you tell with the tractors just shoving the accidents to the side of the road?
[13:19:49] <Tom_itx> that's just silly
[13:19:51] <furrywolf> we have accidents everywhere here, because the average driver is a fucking idiot.
[13:20:20] <Loetmichel> furrywolf: we have some here also... idiots i mean
[13:20:52] <Loetmichel> especially the kind that pulls out behind a semi at 55mph and doesnt look in the review mirror...
[13:21:04] <Loetmichel> and me running up at 140mph...
[13:21:14] <Loetmichel> i have to state: my ABS works well ;-)
[13:21:26] <Loetmichel> tested it MORE than a few times ;-)
[13:22:41] <Loetmichel> when you can see the front brake disks glow as reflection in the street at night you know that was a damn near miss ;-)
[13:29:07] <furrywolf> lol
[13:30:33] <pcw_home> so the winner for the most dangerous place to drive (in fatalities per mile) is Brazil
[13:31:43] <Tom_itx> pcw_home, naw:
http://tom-itx.no-ip.biz:81/~webpage/deathroad/deathroad_index.php
[13:33:45] <pcw_home> no thanks, I think I'll take an alternate route...
[13:33:52] <Tom_itx> me too
[13:40:28] <Loetmichel> Tom_itx: nice road. where is that?
[13:40:43] <Loetmichel> an bolivia
[13:40:44] <jthornton> I need a better motherboard for this computer
[13:40:46] <Loetmichel> ah
[13:41:07] <Loetmichel> would love to drive it... in a jeep or something
[13:41:09] <jthornton> regular atx
[13:41:17] <Loetmichel> semi: not so much
[13:41:18] <Loetmichel> ;-)
[14:00:42] <JT-Shop> gentlemen too your grills!
[14:00:54] <_methods> hell yeah
[14:00:58] <_methods> steak and lobster here
[14:01:29] <JT-Shop> marinated chicken here
[14:02:09] <_methods> got a bunch of giant ribeyes and some little lobster tails
[14:02:27] <JT-Shop> I think I have time to finish before the rains get here
[14:02:30] <_methods> corn on the cob and i'm going to try throwin some baked 'taters on teh grill
[14:02:53] <_methods> i'm firing mine up right now
[14:03:40] <JT-Shop> http://gnipsel.com/recipes/marinated-chicken/marinated-chicken.html
[14:03:47] <JT-Shop> I need to get a photo
[14:06:51] <_methods> pullin my steaks out now
[14:09:41] <_methods> http://i.imgur.com/JpC1aZO.jpg
[14:10:23] <_methods> monster steaks
[14:14:35] <MarkusBec> https://twitter.com/markusbec/status/597471605233741825
[14:16:18] <furrywolf> mmm, food.
[14:16:38] <_methods> mmmmm flank steak
[14:16:53] * furrywolf takes people's food and eats it!
[14:20:27] * Loetmichel just had a "american pizza" + double bacon+ double cheese ;-)
[14:20:36] <Loetmichel> <- full to the brim ;-)
[14:20:44] * furrywolf hasn't had any food today
[14:20:45] <CaptHindsight> with bacon?
[14:21:32] <Loetmichel> yes
[14:24:37] <CaptHindsight> reminds me of
https://screen.yahoo.com/taco-town-000000333.html Taco Town
[14:26:48] <MarkusBec> Geo Restriction
[14:26:54] <MarkusBec> granrr
[14:27:21] <CaptHindsight> https://www.youtube.com/watch?v=dz5MtModlDg but it seems to be missing the sound
[14:28:10] <CaptHindsight> http://www.snotr.com/video/3069/Taco_Town
[14:29:01] <JT-Shop> nice thick ones
[14:30:43] <CaptHindsight> JT-Shop: I made the solvent anodize inks available and also have the water rinse out resin working for SLA
[14:32:18] <MarkusBec> https://www.youtube.com/watch?v=sNWjTU6KYso&spfreload=10&channel=BarbecueWeb
[15:02:28] <t12> today i discovered starrett adjustable jaw nippers
[15:03:01] <CaptHindsight> http://linuxgizmos.com/linux-ready-com-mates-an-i-mx6-soc-with-an-fpga/ unfortunately pair with Altera vs Xilinx so it would take a bit of work to get HM2 working
[15:12:16] <_methods> wtf are adjustable jaw nippers
[15:13:13] <_methods> jeebus those are some high dollar wire strippers
[15:17:31] <t12> used ones are pretty cheap
[15:18:08] <t12> http://www.ebay.com/itm/Starrett-Wire-Cutter-Pliers-Nippers-No-1-5-1-2-in-USA-/251945179775?pt=LH_DefaultDomain_0&hash=item3aa91a5a7f
[15:18:14] <t12> without the carbide jaws
[15:25:41] <t12> lol sterrett
[15:25:50] <t12> uses 6-40 1/4 fillister head screws
[15:26:01] <t12> which are apparently fairly annoying to purchase
[15:38:17] <andypugh> I had to make some of those for my (1936) Rivett. I can’t help but feel that Starret should have moved on.
[15:39:06] <andypugh> I recently succumbed to a pair of these though:
http://www.workshopheaven.com/cgi-bin/sh000340.pl?WD=dividers&PN=Starrett%2d277%2d3%2dThree%2dInch%2dDividers%2ehtml#SID=99
[15:39:17] <t12> i've been told it was an active effort
[15:39:21] <t12> of using oddball screw sizes
[15:39:51] <t12> pretty good fleamarket run today
[15:39:52] <t12> https://www.dropbox.com/sc/2pl3hjmjy3st98g/AADW4CRfcmIxF3vr-Ox9uYexa
[15:39:57] <Tom_itx> andypugh have you done much with velocity PID?
[15:40:19] <Tom_itx> i'm looking for some starting numbers for this sherline spindle motor
[15:40:52] <andypugh> Start with a calculated FF0 and then add some I
[15:41:10] <Tom_itx> pcw suggested P and I terms
[15:41:15] <andypugh> FF0 is the PWM per RPM number
[15:41:28] <Tom_itx> ok
[15:42:02] <andypugh> It should work approximately OK with just the FF0, then the I term corrects for nolinearity.
[15:42:21] <andypugh> (Some P might bring it in faster_
[15:42:24] <Tom_itx> it's way off on the low end and fairly close on the top
[15:44:14] <andypugh> I would say get it right at mid speed and let the PID correct anywhere else.
[15:44:50] <andypugh> I wonder where these were made?
http://www.workshopheaven.com/tools/Perfect-Pattern-Chisels-Set-of-5.html If it is Sheffield then I will buy them. Othjerwise I won’t :-)
[15:48:18] <_methods> everything looks good but that hakko lol
[16:02:54] <t12> lol
[16:02:58] <t12> that hakko is great
[16:03:11] <t12> its an old agilent produciton line one
[16:03:18] <t12> the kind that has a card lockout
[16:03:28] <t12> so people getting paid peicework cant turn the temp up
[16:08:34] <_methods> i'm just jokin man
[16:08:53] <_methods> hakko makes great kit
[16:09:05] <t12> i dunno about their purple/yellow color scheme now
[16:09:15] <_methods> not as good as jbc but it will work lol
[16:09:21] <t12> blue yellow?
[16:09:56] <t12> ah didnt know about jbc
[16:13:05] <_methods> oh yeah?
[16:13:19] <t12> the nano ones look cool
[16:13:57] <_methods> i have an old ad1200
[16:14:19] <t12> i think next soldering purcahse is a hot air system
[16:14:23] <_methods> the new jbc stuff is beyond my pay scale lol
[16:15:01] <t12> yup looks expensive
[16:15:57] <_methods> ebay and patience
[16:17:28] <t12> oh dang
[16:17:35] <t12> seagate r&d lot on dovebid
[16:28:43] <Deejay> gn8
[17:23:17] <andypugh> pcw_home: Interesting 7i92 question on the forum
[17:26:44] <pcw_home> let me take a look...
[17:30:46] <micges1> dang bitfile destination mismatch...
[17:34:40] <Tom_itx> is motion.spindle-speed-out the commanded velocity from the S word?
[17:34:48] <Tom_itx> it appears to be
[17:37:06] <pcw_home> Yes And I forgot FF0 (should be 1 if output of PID is scaled in RPM)
[17:39:41] <Tom_itx> so where do i plug the pid.0.output back into the loop?
[17:40:02] <Tom_itx> using hostmot2 pwmgen
[17:43:26] <pcw_home> PID out goes to the PWMgen (which should be scaled in RPM)
[17:44:18] <pcw_home> so for example if you set FF0 to 1 and P,I,D, etc to 0 it should be the same as before (open loop)
[17:47:03] <pcw_home> that is with FF0 of 1 and everything else 0 else makes the PID component do
[17:47:04] <pcw_home> nothing but copy the command input (motion spindle speed out) to the PID output
[17:47:28] <pcw_home> so its open loop just as you had before
[17:47:44] <Tom_itx> one sec
[17:48:22] <atom1> setp pid.0.command <= motion.spindle-speed-out
[17:48:31] <Tom_itx> right?
[17:48:45] <pcw_home> yes
[17:48:51] <Tom_itx> then where does it go back to the pwmgen?
[17:49:06] <pcw_home> pid out --> pwmgen
[17:49:17] <pcw_home> (with the correct names)
[17:50:57] <Tom_itx> wow, big irc lag...
[17:51:14] <Tom_itx> hm2_7i90.0.pwmgen.00.value ?
[17:51:50] <Tom_itx> hm2_7i90.0.pwmgen.00.value <= pid.0.output ?
[17:52:34] <pcw_home> sure
[17:53:28] <Tom_itx> which is currently the commanded speed
[17:53:36] <pcw_home> assuming the PWM is scaled in RPM (it should be as that needed for open loop and we are still open loop if you have no P or I)
[17:53:58] <Tom_itx> ie S 300, motion.spindle-speed-out and ...pwmgen.00.value are all 300
[17:54:27] <Tom_itx> but with PID between ...pwmgen.00.value will increase
[17:54:33] <Tom_itx> or decrease as needed
[17:54:40] <pcw_home> yes you are just inserting the PID component in spindel speed chain
[17:55:04] <Tom_itx> i just wasn't sure where to plug it in
[17:55:18] <Tom_itx> and you say set FF0 to 1?
[17:55:18] <pcw_home> if you have P or I (without it should behave exactly as before)
[17:55:25] <Tom_itx> right
[17:55:37] <pcw_home> yes that make the PID a no--op
[17:55:42] <Tom_itx> set P & I to 1 and it will be neutral
[17:56:18] <pcw_home> no if P and I are 0 you should have identical behaviour as before
[17:56:44] <Tom_itx> Results in a contribution to the output that is the error multiplied by Pgain
[17:56:54] <Tom_itx> if Pgain is 0 the result will be 0
[17:57:03] <Tom_itx> not what it was input as
[17:57:29] <Tom_itx> if Pgain is 1 it shouldn't be affected unless i don't understand this PID loop
[17:58:11] <pcw_home> with FF0 of 1 the output will follow the input so if you command 500 RPM the PID output will be 500
[17:58:16] <Tom_itx> anything either side of 1 would be a decrease or increase to gain
[17:58:43] <Tom_itx> it's that way without pid
[17:59:23] <Tom_itx> i set FF0 to 1 for now
[17:59:33] <pcw_home> P = 0,I=0 ,FF0 = 1 for open loop (input is copied to output)
[17:59:36] <Tom_itx> but i'm not sure i understand why you set Pgain to 0
[17:59:44] <Tom_itx> mkay
[17:59:51] <Tom_itx> i would think P & I would be 1
[17:59:59] <Tom_itx> but i've never messed with this loop
[18:00:02] <pcw_home> FF0 is independent of P
[18:00:07] <Tom_itx> i get that
[18:00:25] <Jymmm> Goodyear, a Continental Company.
[18:00:46] <Tom_itx> but the command value is multiplied by the Pgain
[18:00:55] <Tom_itx> and if Pgain is 0 the command value will be 0
[18:00:58] <pcw_home> Nope
[18:01:07] <Tom_itx> but if it's 1 it will be command value out
[18:01:23] <pcw_home> the _error_ is multiplied by P
[18:01:37] <pcw_home> not the command
[18:01:39] <Tom_itx> i'll try it
[18:01:49] <Tom_itx> then increase P by .0xx numbers
[18:02:06] <Tom_itx> until it oscillates
[18:02:19] <Tom_itx> back off a couple and add I
[18:02:37] <Tom_itx> you don't think FF0 will contribute to the smoothness?
[18:02:40] <pcw_home> a P of 1 means that a 1 RPM error will result in a 1 RPM correction added to the FF0 value
[18:03:17] <Tom_itx> you just said P and FF0 were independent of each other :)
[18:03:28] <Tom_itx> or that's what i heard anyway)
[18:03:58] <pcw_home> They are but the output is the sum of FF0*Command and -P*Error
[18:04:33] <Tom_itx> so i'll leave FF0 at 1 and start I at 0 and P at some 0.0xx value
[18:05:03] <Tom_itx> where it needs the most boost is at low rpm
[18:05:14] <Tom_itx> high rpm are not too far off comparatively
[18:05:18] <pcw_home> Yeah depending on the various delays you may be able to use P in the 10s to 100s
[18:05:30] <Tom_itx> that much?
[18:06:01] <pcw_home> well you also depend on I
[18:06:06] <Tom_itx> that won't overshoot the midrange where it's pretty close?
[18:06:52] <pcw_home> if theres little error, P wont do much...
[18:07:09] <Tom_itx> i don't expect to get good results much below 150rpm
[18:07:25] <Tom_itx> it may surprise me..
[18:08:03] <Tom_itx> right now with S300 i'm getting around 140rpm
[18:08:04] <pcw_home> no, and its tricky to tune non servo drives (since you can apply instant reverse force)
[18:08:14] <pcw_home> cant apply
[18:08:45] <Tom_itx> i bet there's .25 sec delay from fwd to rev
[18:09:50] <pcw_home> and I'm not sure if accel/decel torques are equivalent
[18:10:21] <pcw_home> so simple drives are not so simple to tune
[18:11:43] <pcw_home> I guess I would just add P until it gets unstable and then use about 1/2
[18:11:44] <pcw_home> and then do the same with I
[18:11:57] <Tom_itx> do i use setp with those or net?
[18:12:06] <Tom_itx> ie pid.0.command
[18:12:38] <pcw_home> setp (or better still use the calibrate routine so you can play with them live)
[18:13:01] <Tom_itx> not aware of that
[18:13:33] <Tom_itx> cmd line?
[18:13:42] <pcw_home> pid.0.command needs to be netted to motion spindle speed out
[18:14:21] <pcw_home> just steal you current direct spindle speed to PWM net
[18:14:53] <pcw_home> axis menu selectable tool
[18:14:58] <Tom_itx> ok
[18:15:19] <Tom_itx> yeah i'm sticking the pid between spindle speed now
[18:15:33] <pcw_home> parameters need to be in the ini file for calibrate to find/use them
[18:16:42] <pcw_home> calibrate can save your changes to the ini file when done so thats handy
[18:17:52] <Tom_itx> should this be in the ini?
[18:17:56] <Tom_itx> i've got it in hal right now
[18:19:09] <pcw_home> they advantage of the ini way is that calibrate works :-)
[18:19:24] <Tom_itx> heh
[18:20:00] <Tom_itx> i'll get it working then move it over
[18:20:02] <pcw_home> you cal also just use halcmd to setp the P and I values live
[18:20:07] <Tom_itx> then tune it
[18:20:19] <pcw_home> can also
[18:20:22] <Tom_itx> yeah halcmd just won't save it
[18:20:31] <pcw_home> nope
[18:22:03] <pcw_home> I like halcmd from the terminal better than setp in the axis
[18:22:05] <pcw_home> show hal configuration window since you have command history
[18:25:19] <andypugh> Yes, halcmd -kf into an existing HAL session is a convenient wat to adjust stuff, and you get command history and tab-completion.
[18:25:42] <Tom_itx> can you put setp and net in the ini file?
[18:25:54] <Tom_itx> or do you address the vars differently there
[18:26:14] <pcw_home> nope
[18:26:26] <andypugh> The INI file is entirely passive. It is somewhere that other things can get data from
[18:27:14] <andypugh> HAL knows how to search the INI for [SECTION]PARAMETER to get numbers back.
[18:27:39] <Tom_itx> so PID-PGAIN = 10 would be used in the hal file as pid.0.Pgain = PID-PGAIN ?
[18:27:42] <Tom_itx> or such
[18:27:52] <Tom_itx> err setp pid.....
[18:27:54] <andypugh> (You can create your own sections and parameters)
[18:28:06] <Tom_itx> i'm aware of that part
[18:28:31] <andypugh> setp pid.0.Pgain [SPINDLE]PGAIN
[18:28:37] <Tom_itx> yeah
[18:28:44] <Tom_itx> that's what i meant to say :D
[18:28:57] <andypugh> (Or [MARY]TARQUIN if you want)
[18:30:05] <Tom_itx> then using calibrate you just set the values of the ini vars and it will save them
[18:30:56] <andypugh> Well, you have to remember to pess the “save” buton
[18:32:44] <pcw_home> and you have to press 'test 'to use the values you enter
[18:34:11] <pcw_home> hmm I have not actually tried calibrate on a spindle not sure if its one of the INI file sections it looks for
[18:36:29] <Tom_itx> we'll see here real soon
[18:48:46] <Tom_itx> do i need to addf pid.0 servo-thread ?
[18:48:55] <Tom_itx> i get errors when i do
[18:49:26] <Tom_itx> loadrt pid num-chan=1
[18:49:32] <Tom_itx> addf pid.0 servo-thread
[18:57:22] <Tom_itx> [SPINDLE] doesn't show up in calibration
[19:11:04] <andypugh> Try calling it [AXIS_8] or something
[19:13:06] <Tom_itx> i did
[19:14:22] <andypugh> Did it help?
[19:14:26] <Tom_itx> no
[19:16:19] <Tom_itx> it would be nice if it looked for [SPINDLE_x]
[19:16:27] <Tom_itx> or [SPINDLE] even
[19:16:42] <Tom_itx> for things like this
[19:18:24] <andypugh> It should be possible to look in the code for what it _does_ look for.
[19:18:42] <Tom_itx> i wouldn't know where to look for that
[19:24:31] <Tom_itx> i'm not getting any output from the pid yet
[19:24:47] <Tom_itx> pid.0.command is 300 pid.0.output is 0
[19:25:12] <Tom_itx> pgain is 0 Igain is 0 FF0 is 1
[19:25:32] <Tom_itx> which is what i understood pcw_home as being 'neutral'
[19:25:49] <andypugh> Is the PID enabled?
[19:26:23] <Tom_itx> well it shows up in hal configuration
[19:26:36] <Tom_itx> aarg.. maybe not
[19:27:05] <Tom_itx> where do i put pid.0.do-pid-calcs ?
[19:27:12] <Tom_itx> set it to a value or what?
[19:28:53] <Tom_itx> show configuration has pid.0.do-pid-calcs.time as 0
[19:28:57] <Tom_itx> what is time defined as?
[19:29:11] <Tom_itx> it's a float value
[19:29:17] <andypugh> You need to addf pid.0.do-pid-calcs to the servo thread
[19:29:29] <Tom_itx> but not pid.0 ?
[19:29:49] <Tom_itx> i got an error when i did that
[19:29:57] <andypugh> http://www.linuxcnc.org/docs/html/man/man9/pid.9.html
[19:30:28] <andypugh> You need to addf the functions
[19:30:30] <Tom_itx> i've got that open
[19:30:49] <Tom_itx> i did addf pid.0 servo-thread and got an error
[19:31:09] <Tom_itx> ok, just the functions
[19:31:26] <andypugh> You can’t addf pid.0, you need to addf the actual function name
[19:31:40] <Tom_itx> gotcha
[19:31:54] <Tom_itx> what should time be set to?
[19:32:07] <Tom_itx> pid.0.do-pid-calcs.time
[19:32:19] <Tom_itx> or will that be set by adding it to the thread?
[19:32:20] <andypugh> You don’t set it, the function time is a measurment
[19:32:32] <Tom_itx> ok
[19:33:01] <Tom_itx> that could be added to the SYNOPSIS for clarity :)
[19:33:05] <andypugh> You also need to setp the pid.0.enable to 1 too. (or net it to motion.spindle-is-on)
[19:33:24] <Tom_itx> ok the latter is probably better?
[19:33:31] <andypugh> You are meant to know that every HAL component needs its function adding to a thread.
[19:34:10] <Tom_itx> us noobs don't know all that yet. i guess i should by now
[19:50:43] <Tom_itx> andypugh, with the pid neutral, should the pwmgen scale be set so that all the range undershoots a bit?
[19:50:46] <Tom_itx> aarg crap
[19:50:58] <Tom_itx> well, anybody?
[20:05:06] <pcw_home> pwmgen scale should be set in RPM
[20:12:43] <Tom_itx> right but right now it overshoots in the high range
[20:13:05] <Tom_itx> adding pid to that will make the high overshoot more won't it?
[20:13:20] <Tom_itx> don't i wan't it all to undershoot a bit
[20:41:48] <_methods> bottom of the harbor freight mothers day coupon
[20:42:09] <Tom_itx> i notice that it seems no matter what i set, the pwmgen.00.value gradually keeps increasing
[20:44:36] <pcw_home> overshoot is probably best handled by putting the command through limit2
[20:44:38] <pcw_home> (so you dont have stepwise changes in the commanded velocity)
[20:45:20] <Tom_itx> it's a gradual increase, not a snap to speed but it keeps creeping
[20:45:42] <Tom_itx> i did add a little D to see what it would do
[20:46:22] <Tom_itx> should i try chaning FF0 off 1 to say 1.05 or something
[20:51:15] <pcw_home> If FF0 is not 1 that means scaling is probably wrong somewhere else
[20:51:34] <pcw_home> D is typically not useful
[20:51:46] <Tom_itx> i fiddled with pwmgen.scale so that it won't overshoot at the high range
[20:51:54] <Tom_itx> yeah i didn't see much from D
[20:52:00] <Tom_itx> set it back to 0
[20:52:29] <Tom_itx> what causes it to creep up like that?
[20:52:33] <Tom_itx> the I term?
[20:53:08] <pcw_home> If you have any I term you cannot have steps in the command so overshoot is best handled
[20:53:10] <pcw_home> by limiting the rate of change of the velocity command
[20:53:12] <Tom_itx> the pwmgen.00.value is always higher than the rpm
[20:53:34] <Tom_itx> i'm not sure how to use limit2
[20:53:45] <pcw_home> thats expected (its doing its job)
[20:53:54] <Tom_itx> yeah
[20:54:18] <Tom_itx> but even after it reaches it's setpoint it continues to creep
[20:54:31] <pcw_home> that is, if the input matched the output you have perfect open loop performance so PID is not required
[20:54:42] <Tom_itx> and after going from a higher rpm to a lower one it returns to a rpm higher than the S word
[20:54:48] <Tom_itx> yeah
[20:55:05] <Tom_itx> and continues to creep up from that
[20:56:03] <pcw_home> did you set P as high as it can go first (with I = 0) ?
[20:56:15] <Tom_itx> yeah
[20:56:30] <Tom_itx> i kept the high range under the setpoint
[20:56:56] <Tom_itx> which caused the low range not to reach it's setpoint
[20:57:41] <pcw_home> the I term probably has to be quite a big number for reasonable fast response
[20:58:34] <pcw_home> otherwise it will creep towards the setpoint
[20:59:03] <Tom_itx> i'll increase it a little at a time and watch it
[20:59:16] <pcw_home> _but_ a large I term means you _must_ limit the rate of change of the command
[20:59:42] <pcw_home> or you will get whats called integrator windup
[21:00:13] <pcw_home> and large overshoots/ringing
[21:01:11] <Tom_itx> I is what is causing the creep
[21:01:15] <Tom_itx> which makes sense
[21:01:34] <pcw_home> that is the commanded spindle velocity should not exceed the acceleration capabilities of the drive
[21:01:36] <pcw_home> I is all about creep
[21:02:07] <pcw_home> (gradually homing in on the setpoint)
[21:02:11] <Tom_itx> i did initially have it set too high and it ran away the first time
[21:02:35] <Tom_itx> had no idea where to start with the numbers
[21:02:57] <pcw_home> well you have P right?
[21:03:51] <pcw_home> but really I needs to have limit2 on the commanded spindle speed
[21:04:10] <Tom_itx> p is close
[21:04:30] <Tom_itx> i'm not sure where or how to put limit2 in the loop
[21:05:02] <Tom_itx> limit2.out would go to the pwmgen.value right?
[21:05:20] <Tom_itx> limit2.in would go to the command speed?
[21:05:28] <pcw_home> motion spindle speed --> limit in --> limit out --> PID command in
[21:06:01] <Tom_itx> and how do you set the limit min max?
[21:06:19] <pcw_home> man limit2 :-)
[21:06:36] <Tom_itx> i did
[21:07:52] <pcw_home> min and max dont need to be set
[21:08:01] <pcw_home> only maxv
[21:09:02] <pcw_home> since the input and output are RPM
[21:09:04] <pcw_home> maxv is scaled in RPM per second
[21:09:22] <Tom_itx> so set maxv to the commanded rpm?
[21:10:15] <pcw_home> no, maxv is set to limit the rate of change
[21:11:05] <pcw_home> so for example setting maxv to 500 would limit the output rate of change to 500 RPM per second
[21:11:12] <Tom_itx> as it is right now, with S500 if i let it run rpm would increase beyond 2000 i'm sure of it
[21:12:35] <Tom_itx> so in that example if i commanded S3000 it would take a few sec for it to reach
[21:14:22] <pcw_home> If it increases to 2000 that sounds like either the feedback velocity is wrong
[21:14:23] <pcw_home> or perhaps you have a wrap because of a sign change
[21:15:06] <Tom_itx> i didn't let it go that far to verify it
[21:15:17] <Tom_itx> but it crept from 500 past 1000
[21:16:38] <pcw_home> that means either the feedback is not working (is the scaled spindle velocity it wired to the PID? is in the correct sign?)
[21:17:04] <pcw_home> Or like I said you have a wrap issue
[21:17:19] <Tom_itx> how do you check that?
[21:17:37] <Tom_itx> sign is right
[21:18:38] <atom1> right now it's set like this:
[21:18:42] <pcw_home> so you are saying the pid command is 500, the PID feedback is 1000 and its still commanding a higher speed?
[21:19:07] <atom1> yes
[21:19:11] <atom1> net spindle-speed-out motion.spindle-speed-out => abs.0.in pid.0.command
[21:19:23] <atom1> net spindle-pid-out pid.0.output => hm2_[HOSTMOT2](BOARD).0.pwmgen.00.value
[21:19:57] <pcw_home> so look at the PID output
[21:20:03] <atom1> P is .28 I is .05
[21:20:33] <atom1> i'm watching the pwmgen.00.value
[21:20:41] <atom1> and it keeps creeping
[21:21:03] <pcw_home> well it will creep with such a low I term
[21:21:31] <Tom_itx> even past the setpoint?
[21:22:09] <pcw_home> Yes
[21:23:10] <pcw_home> well first look at PID command, PID feedback and PID output when you are past the setpoint
[21:24:01] <pcw_home> (and probably turn off the I term for testing)
[21:26:09] <Tom_itx> at 3000 it's 3840 at 500 it's 640
[21:26:19] <Tom_itx> 500 actual rpm is 300
[21:26:44] <pcw_home> with only P at .28 and FF0 of 1, a commanded speed of 500 RPM with an actual (feedback pin of PID) speed of 1000
[21:26:46] <pcw_home> should result in a PID output of 360
[21:26:46] <Tom_itx> 3000 actual is right around 3000
[21:27:34] <Tom_itx> feedback is 0
[21:27:52] <Tom_itx> i may not have everything set up the way it should be yet
[21:28:21] <pcw_home> OK so without feedback this cannot work :-)
[21:28:35] <Tom_itx> where should feedback be wired to?
[21:28:49] <zeeshan> today was a good day
[21:28:50] <zeeshan> lol
[21:28:59] <pcw_home> encoder velocity *60
[21:29:50] <Tom_itx> so the scale output of the encoder
[21:29:58] <pcw_home> yes
[21:30:29] <Tom_itx> no wonder i'm getting nowhere
[21:31:34] <pcw_home> well you found that you need 0 P and I terms if you are running open loop
[21:31:51] <zeeshan> http://i.imgur.com/WoYWaK2.jpg
[21:31:54] <zeeshan> machined these babies today
[21:32:02] <zeeshan> http://i.imgur.com/6Zsrdpo.jpg
[21:32:07] <zeeshan> http://i.imgur.com/u8mGzbT.jpg
[21:32:45] <pcw_home> Elephant toe rings?
[21:33:27] <zeeshan> no idea :P
[21:33:41] <zeeshan> but all of them were within a thou on the OD
[21:35:16] <pcw_home> nice finish
[21:35:33] <zeeshan> chinese lathe ftw
[21:35:34] <zeeshan> !!
[21:36:01] <zeeshan> im dieing for slant bed lathe still though
[21:42:19] <Tom_itx> ok pid.command 500 feedback 270 output 612
[21:42:33] <Tom_itx> P .5
[21:43:56] <pcw_home> now with feedback you can probably use a higher P term
[21:44:33] <Tom_itx> up to 1.5 now and testing
[21:44:48] <zeeshan> pcw_home: my engineering buddy suggested that i have 2 tanks . one with 300C fluid and one with -20C fluid
[21:45:00] <zeeshan> and use proportional valves to control the flow rate of them mixing in a chamber
[21:45:03] <zeeshan> what do you think
[21:45:24] <zeeshan> said that way i can get pretty close to linear temperature change
[21:45:29] <pcw_home> yeah thats probably easier to control
[21:46:00] <zeeshan> this type of control would be temperature as a function of flow rate?
[21:47:22] <zeeshan> while in my current design its temperature as a function of current and temperature (for heat conduction) as a function of flow rate (for cold fluid)
[21:47:51] <zeeshan> in either the mixing chamber and my design, there do you think its reasonable to expect thermal lag
[21:48:10] <zeeshan> cause of the conduction and convection that needs to occur before the temp hits the setpoint @ the thermocouple?
[21:48:18] <zeeshan> - there
[21:48:49] <Tom_itx> ok with P at 2, going from a high rpm (3000) and command a S200 it winds up way beyond 5000
[21:49:01] <Tom_itx> so that must be close to the limit for P
[21:49:14] <Tom_itx> or i need to add limit2 in there
[21:49:42] <Tom_itx> if i bring it down in steps 3000 2000 1000 200 it does fine
[21:49:58] <zeeshan> whats limit2? :P
[21:50:12] <zeeshan> it2 − Limit the output signal to fall between min and max and limit its slew rate to less than maxv per second. When the signal is a position, this means that position and velocity are limited.
[21:50:14] <Tom_itx> i'm not sure pracically when that would ever happen... changing spindle speeds like that
[21:55:28] <Tom_itx> i'm not getting 1000
[21:55:36] <Tom_itx> damn scrollback..
[22:03:42] <pcw_home> "Tom_itx ok with P at 2, going from a high rpm (3000) and command a S200 it winds up way beyond 5000"
[22:03:43] <pcw_home> what is happening here is that the PID output is commanding in a reverse direction (but your hardware in not )
[22:03:52] <pcw_home> is not
[22:04:46] <Tom_itx> i lowered it a bit and started adding I
[22:05:04] <Tom_itx> P is 1 now
[22:05:11] <Tom_itx> I was 1 but is too high
[22:05:32] <Tom_itx> i get windup with certain conditions
[22:05:54] <pcw_home> This is the problem I was alluding to before...
[22:05:56] <pcw_home> P should probably be much higher but you have to avoid reversals
[22:06:51] <Tom_itx> well i know but i want to use rigid tapping
[22:07:26] <pcw_home> you can use the PID components max error to help a bit here
[22:09:10] <Tom_itx> with P at 1 and I at .5 i don't get windup
[22:10:08] <Tom_itx> well if i go to extremes i do
[22:11:46] <Tom_itx> well i gotta stop on this for tonight
[22:12:42] <Tom_itx> would the maxerrorI help with windup?
[22:12:49] <Tom_itx> or just maxerror?
[22:15:25] <pcw_home> say if you set max error to 100
[22:15:26] <pcw_home> I dont think your actual problem is so much windup as runaway if the PID output goes negative
[22:16:04] <Tom_itx> i agree, just wasn't sure what to call it
[22:17:44] <pcw_home> actually this probably needs special handling to be safe
[22:18:02] <Tom_itx> that helped
[22:18:43] <Tom_itx> i can command 5000 then 200 and it doesn't run away now
[22:19:09] <Tom_itx> not sure why you would on a spindle but i don't want it to run away
[22:20:14] <pcw_home> if you add your reversal logic and limit the rate of change of the command that will help
[22:22:51] <Tom_itx> reverse is working as well
[22:23:03] <Tom_itx> i can increase the P and I but not tonight
[22:23:10] <Tom_itx> it's getting close
[22:23:17] <Tom_itx> appreciate your help
[22:23:27] <Tom_itx> maxerror is 200 atm
[22:23:44] <Tom_itx> seems to be within the limits of the hardware
[22:24:10] <Tom_itx> freewheeling, maxerror would be at it's worst
[22:24:20] <Tom_itx> and it seems ok at 200
[22:24:52] <Tom_itx> i'll work on P & I a bit more tomorrow
[22:33:42] <Tom_itx> zeeshan, looks good
[22:39:17] <PetefromTn_> https://www.youtube.com/watch?v=ZUG9qYTJMsI This guys kinda funny anyone ever tried these blades?
[22:40:37] <PetefromTn_> ;)
[22:45:03] <roycroft> so i discovered today what is harder than tapping stainless steel - tapping stainless steel that's gotten really hot
[22:50:02] <PetefromTn_> hate frackin' stainless man LOL
[22:50:18] <roycroft> yes, i grow weary of working with it
[22:50:24] <roycroft> it gets really shiny though
[22:51:23] <PetefromTn_> Like Tig welding with it, hate machining it
[22:51:47] <roycroft> making it shiny is a pain in the butt too
[22:52:35] <roycroft> but at the end of the day, it is nice having ss parts
[22:55:20] <zeeshan> Tom_itx: thank u
[23:09:10] <furrywolf> zeeshan: I suggested mixing hot and cold fluids already. :P
[23:09:48] <zeeshan> i think a 300C reservior is prolly a bad idea
[23:09:49] <zeeshan> lol
[23:10:26] <furrywolf> which is why I suggested an inline heater.
[23:10:52] <zeeshan> will need a lot of capacity
[23:10:54] <zeeshan> shrug
[23:19:57] <furrywolf> anyone have a 50A 125/250V twistlock female they want to sell me?
[23:20:41] <roycroft> inline or panel mount?
[23:20:45] <furrywolf> cheap
[23:20:57] <furrywolf> that is, I'll make do with whatever I can get cheap. :P
[23:21:11] <roycroft> i might have something
[23:21:18] <roycroft> but i can't be bothered to go check tonight
[23:21:26] <furrywolf> lol
[23:21:27] <roycroft> tomorrow evening i can see what i ahve
[23:21:36] <furrywolf> I went to the local hardware store, and let's just say it wasn't cheap.
[23:23:34] <roycroft> no, they are not cheap
[23:23:40] <furrywolf> I bought a used jobsite power box and cord... need a receptacle to plug the cord into.
[23:23:43] <roycroft> and if i have one i won't sell it for cheap
[23:23:48] <roycroft> but i'll sell it for less than retail
[23:24:06] <roycroft> what is the connector type?
[23:24:08] <furrywolf> the hardware store wanted twice as much for just the receptacle as I paid for the jobsite box (a big nice one) and 50-100ft of 6/4 soow.
[23:24:48] <furrywolf> http://www.ebay.com/itm/50-Amp-125-250-Volt-4-Wire-1-Phase-2-Pole-Twistlock-Receptacle-/261825797399
[23:26:20] <furrywolf> hrmm, there's two different ones in that photo. ignore that one.
[23:26:28] <roycroft> if i have one that's the type i would ahve
[23:26:30] <roycroft> have
[23:26:37] <roycroft> and i'd want at least that much for it
[23:26:38] <roycroft> that's cheap
[23:26:52] <roycroft> they're a whole lot more new
[23:27:00] <roycroft> and yes, there are two different types there
[23:27:01] <furrywolf> http://www.ebay.com/itm/TWIST-LOCK-50A-125-250V-CONNECTOR-MISSING-COVER-USED-/321748728548
[23:27:23] <furrywolf> I might just buy that one (it's cheap) and wrap it in tape.
[23:27:37] <roycroft> and that's not the type i would ahve
[23:27:46] <roycroft> if i have one it's 3 wire + ground
[23:27:55] <roycroft> and it would be panel mount
[23:28:10] <roycroft> oh, wait, that second one you showed is 3 wire + ground
[23:28:40] <roycroft> i'm not sure why it says "125v/250v"
[23:29:26] <furrywolf> it's two hots, neutral, and ground.
[23:29:28] <furrywolf> the metal shell is the ground
[23:29:52] <roycroft> l5-50 is the nema twist-lock 125v/50a connector
[23:30:05] <roycroft> l6-50 is the nema twist-lock 250v/50a connector
[23:30:14] <roycroft> what i would have would be an l6-50
[23:31:35] <furrywolf> I think it's an l14-50 or something
[23:31:40] <roycroft> http://www.stayonline.com/detail.aspx?id=8776
[23:31:48] <roycroft> if i have one that's what i have
[23:32:36] <roycroft> l14-50 is a california standard, not a nema standard
[23:32:56] <furrywolf> yeah, that's the wrong one.
[23:33:01] <furrywolf> sec, let me go double-check it. lol
[23:35:08] * roycroft does not recognize the sovereignty of the golden bear state
[23:35:15] <furrywolf> yeah, it's definitely the one with 4 wires and teo outwards-facing tabs
[23:35:55] <furrywolf> http://www.stayonline.com/detail.aspx?id=8773 very similar
[23:36:20] <zeeshan> why you being fancy with your twist lock!
[23:36:59] <furrywolf> s/teo/two
[23:37:24] <furrywolf> ?
[23:37:29] <zeeshan> use this
[23:37:58] <zeeshan> http://www.leviton.com/OA_HTML/ibcGetAttachment.jsp?cItemId=Uo.gn4ljpA678AZDSTaKIA
[23:37:59] <zeeshan> :D
[23:38:22] <zeeshan> 9 bux
[23:38:25] <zeeshan> http://www.amazon.com/Leviton-279-Receptacle-Industrial-Grounding/dp/B00009W3AA
[23:38:45] <furrywolf> I got a nice box with male and female 50A twistlocks, 6 20A twistlocks and some other plugs (all with individual breakers), and somewhere between 50 and 100ft of 6/4 soow with matching 50a plugs
[23:39:49] <furrywolf> zeeshan: if you like amazon,
http://www.amazon.com/CEP-Marinco-6364M-Female-Connector/dp/B0012NEWH6/ref=sr_1_2?s=hi&ie=UTF8&qid=1431317845&sr=1-2&keywords=50+125+250+twist-lock is the right one
[23:40:03] <zeeshan> 37 bux for a connector
[23:40:04] <zeeshan> jeez
[23:41:04] <sector_0> are steel rod linear rails with bushings/linear bearings stable enough for milling aluminum?
[23:41:13] <furrywolf> unless thin, yes
[23:42:19] <furrywolf> the box I got is similar to
http://www.amazon.com/Coleman-Cable-01962-3R-02-Temporary-Distribution/dp/B003RRWNMQ/ref=sr_1_22?s=hi&ie=UTF8&qid=1431317945&sr=1-22&keywords=50+125+250+twist-lock but I think it has a couple more outlets
[23:42:33] <zeeshan> fancy :D
[23:42:37] <zeeshan> ok its bed time
[23:42:39] <zeeshan> 12:20 am ;[
[23:42:45] <furrywolf> it's got four on each side, not three. heh.
[23:43:27] <sector_0> furrywolf, were you answering my question when you said "unless thin, yes"
[23:43:28] <sector_0> ?
[23:43:37] <furrywolf> sector_0: yes
[23:44:07] <furrywolf> obviously if you use little 10mm diameter rods and try to push a 1" roughing mill through a block of 6061, it's not going to work very well. :)
[23:45:07] <sector_0> furrywolf, so what gauge steel do you recommend for a 280mm span
[23:45:35] <sector_0> I kinda just used aluminum as a base but I didn't stop to think that they're different grade of aluminum
[23:45:37] <furrywolf> no clue. lol
[23:45:38] <Crom> 11"
[23:45:48] <furrywolf> zee is the expert at finite element analysis. :)
[23:46:26] <sector_0> I'll most be milling PCBs though
[23:46:43] <sector_0> I wanna just build a little desktop size mill
[23:47:08] <furrywolf> for pcbs you could build it out of bamboo poles and it'd be fine...
[23:47:14] <Crom> hmm 280 that's within the work area of a 3040, mine has 12mm rods and linear bearings
[23:47:42] <sector_0> Crom, oh ok
[23:47:51] <sector_0> I was also thinking about doing this though...
https://www.youtube.com/watch?v=QDjUn1ZxcRU
[23:47:52] <Crom> the rods are 100mm center to center apart
[23:47:53] <roycroft> unless the gigahertz is gonna be really big
[23:48:08] <Crom> it's ok for going REAL slow on AL
[23:48:08] <roycroft> in which case you should definitely use titanium clad with carbon fibre
[23:48:58] <sector_0> Crom, what do you think about the method in that video?
[23:48:58] <Crom> I'd prefer to have 20mm rods 200mm apart with the Z rods 16mm or 20mm 140mm apart
[23:49:13] <Crom> looking
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}