Back
[00:10:42] <zeeshan|2> anyone got a better suggestion
[00:10:46] <zeeshan|2> to organize these:
[00:10:46] <zeeshan|2> http://i.imgur.com/yuMCl5t.jpg
[00:10:58] <zeeshan|2> airflow path for vfds are from bottom to top
[00:11:08] <zeeshan|2> so i'd like to have as little obstruction
[00:21:17] <MrSunshine> hmm are the small devices there less "self" heating than the big drivers?
[00:22:15] <MrSunshine> they might not be small (low) ?
[00:22:21] <MrSunshine> hard to see from head on picture =)
[00:23:30] <XXCoder> zeeshan|2: maybe draw wiring paths
[00:23:38] <XXCoder> use cardboard to draw on
[00:23:55] <XXCoder> or whiteboard markers if it dont perment mark that thing
[00:24:51] <zeeshan|2> MrSunshine: im confused as to what youre asking
[00:25:16] <zeeshan|2> are you saying that: are thje small vfds generating little heat in comparison to big vfd?
[00:25:20] <MrSunshine> zeeshan|2, the small ones to the left of the VFD
[00:25:28] <MrSunshine> are they smaler than the big drivers for the mototrs ?
[00:25:29] <MrSunshine> motors
[00:25:38] <zeeshan|2> yes theyre smaller
[00:25:40] <zeeshan|2> in height
[00:25:40] <MrSunshine> ahh those are VFDs ?
[00:25:48] <zeeshan|2> yes the black ones that say nfx9000
[00:25:49] <zeeshan|2> are vfds
[00:26:17] <MrSunshine> i was thinking if you could move those to above the big VFD insted .. to not heat the motor drivers extra from hot air from the VFD but then i guess thats a problem also =)
[00:26:36] <zeeshan|2> unfortunately the height ofmy box is 8"
[00:26:37] <MrSunshine> ahh if i would have zoomed i would have seen that :P
[00:26:38] <zeeshan|2> so they wont fit
[00:27:00] <zeeshan|2> i was thnking
[00:27:05] <zeeshan|2> of putting the small vfds on standoffs
[00:27:10] <zeeshan|2> so the power supply doesnt blow the air flow
[00:27:23] <MrSunshine> or move the big VFD up, put the small ones directly under it and move the drivers to where the small VFDs are ? =)
[00:27:39] <MrSunshine> as the small ones should output alot less heat ?
[00:28:19] <zeeshan|2> hmm
[00:28:20] <MrSunshine> that top right motor driver would be in the full blast of the VFDs exhaust right ? =) depending on how hot the VFD will get i would see that as a problem =)
[00:28:20] <zeeshan|2> thats not a bad idea
[00:28:40] <zeeshan|2> i think im going to put some big fans
[00:28:42] <zeeshan|2> to push air
[00:29:51] <zeeshan|2> im tthinking
[00:29:57] <zeeshan|2> the 2 servo drives above the vfd
[00:30:00] <zeeshan|2> i'll make them A and C axis
[00:30:14] <zeeshan|2> cause they'll be used intermittently only
[00:31:37] <Connor> zeeshan|2: Where is the intake for the large VFD ?
[00:31:43] <MrSunshine> my 2 cents are to see to that nothing is in the exhaust of the power beast
[00:32:03] <MrSunshine> "airflow path is bottom to top"
[00:32:04] <zeeshan|2> connor bottom
[00:32:13] <zeeshan|2> (bottom relative to that pic)
[00:32:50] <Connor> What are the PSU's ?
[00:32:57] <Connor> voltage and ampg wise ?
[00:33:15] <MrSunshine> also if you get all the VFDs in line its easier to shield them if they start acting up with interferance =)
[00:33:17] <zeeshan|2> 5V 5A and 24V 8A
[00:33:34] <MrSunshine> zeeshan|2, you can screw the psus to the side of the cabinet also to free up some space
[00:33:38] <MrSunshine> (inside side of it)
[00:33:42] <zeeshan|2> do smps generate a lot of noise?
[00:33:51] <zeeshan|2> cause if i can throw them in the box with the interpolators, pc and 7i77
[00:33:55] <MrSunshine> zeeshan|2, smps? =)
[00:33:56] <zeeshan|2> it'll really help.
[00:34:00] <zeeshan|2> switched mode power supply
[00:34:06] <MrSunshine> ahh
[00:34:32] <zeeshan|2> cause if theyre not there
[00:34:35] <Connor> How big is your cabinet ?
[00:34:35] <zeeshan|2> then it'll be so nice
[00:34:46] <zeeshan|2> i can seperate the 3 phase motor wires
[00:34:53] <MrSunshine> for big indictive loads i read that one should put a diode and a capacitor on the out of smps to the drivers
[00:34:57] <zeeshan|2> connor the one the vfds and servo drives go into is a 24"x24"
[00:35:04] <zeeshan|2> the computer one might be 24x24 also
[00:35:09] <zeeshan|2> depending on what i can scavenge
[00:35:12] <Connor> I would rather have all the Servo's on the same plane.. with a wire duct above and below.
[00:35:17] <MrSunshine> as you could get some strange voltage regulation if you manage to feed back voltage to them from the motors =)
[00:35:21] <Connor> and then the vfd's in line..
[00:35:32] <zeeshan|2> hmm
[00:35:37] <zeeshan|2> maybe i should get a 24x48" box
[00:35:48] <zeeshan|2> but then i'll need to have a seperate control compartment
[00:35:52] <Connor> how big is that it's setting on /
[00:35:55] <zeeshan|2> to house the pc and interpolators
[00:35:58] <zeeshan|2> and 7i77
[00:36:12] <zeeshan|2> the plate is 21x21"
[00:36:39] <Connor> http://www.ivdc.com/cnc/mill_10_31_14_01.jpg
[00:36:47] <Connor> I'm a master at tight spaces.. :)
[00:36:49] <zeeshan|2> haha
[00:36:53] <zeeshan|2> thats why i posted in here
[00:37:00] <zeeshan|2> :D
[00:37:02] <Connor> Have room for 3 more drivers.
[00:37:12] <zeeshan|2> yep!
[00:37:12] <zeeshan|2> haha
[00:37:33] <zeeshan|2> i think i have an idea.
[00:37:35] <zeeshan|2> lkemme take apic
[00:37:40] <Connor> What's the Gap between those drivers?
[00:37:51] <Connor> You probably could move them a tad closer..
[00:43:43] <MrSunshine> oh well time to work .. gl hf zeeshan|2 =)
[00:48:20] <zeeshan|2> :D
[00:48:25] <zeeshan|2> about 1 1/2"
[00:48:42] <zeeshan|2> actually its more
[00:58:57] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15529560458/
[00:58:59] <zeeshan|2> how about that
[00:59:00] <zeeshan|2> :D
[00:59:07] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15716534952/in/photostream/
[00:59:11] <zeeshan|2> airflow path is on the bottom like that
[00:59:27] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15714985255/in/photostream/
[00:59:30] <zeeshan|2> airflow exit of big vfd
[00:59:40] <zeeshan|2> i was thinking of putting like 2" standoffs for the servo drives
[01:00:12] <Connor_iPad> May want to put servos below the big one. It'll produce the most heat.
[01:00:33] <zeeshan|2> but then it'll suck the heat from the servo drives?
[01:01:23] <Connor_iPad> A and C on right side. They not used near as much.
[01:01:40] <zeeshan|2> http://www.pluscon.in/pcat-gifs/products-small/vfd-panels_10853149.jpg
[01:01:47] <zeeshan|2> interesting
[01:01:50] <zeeshan|2> they do stack vfds vertically
[01:02:15] <Connor_iPad> Yup.
[01:02:20] <zeeshan|2> http://www.red-e-vfd.com/wp-content/uploads/2013/02/A-B-Drives.jpg
[01:02:26] <zeeshan|2> these dont even have gap!
[01:02:28] <zeeshan|2> sideways..
[01:16:29] <zeeshan|2> last pic for the night :P
[01:17:11] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15713140961/
[01:17:21] <zeeshan|2> i think this bblocks the least amount of airflow
[01:17:32] <zeeshan|2> those .5 hp vfds are tiny
[02:08:04] -card.freenode.net:#linuxcnc- [freenode-info] please register your nickname...don't forget to auto-identify!
http://freenode.net/faq.shtml#nicksetup
[02:08:49] <Deejay> moin
[06:07:46] <miss0r> Have any of you guys ever successfully created two matching bevel gears in google sketchup ? I have some questions regarding the angles. When I create an envolute gear, and "resize" the top to half the size, I should get an angle of 45degrees on the outside, but this is only correct with the pitch. What am I doing wrong?
[06:11:00] <archivist> it is not trivial
http://www.archivist.info/gear/designbevel.php
[06:12:15] <miss0r> I am beginning to get a feeling that is not the case :)
[06:12:19] <miss0r> Thank you
[06:12:35] <SpeedEvil> Tooooo many numbbbbbbbbbbbbbbbbbbbaaaaaaaaaaarrs.
[06:13:15] <archivist> having done that maths written gcode and
http://www.collection.archivist.info/searchv13.php?searchstr=bevel
[06:13:25] <archivist> it was still not right
[06:14:10] <miss0r> Well. I am building a safe door for my basement cinema :) It has to look and work completely like an old 'franz jäger' safe - like in a danish movie series called 'olsen Banden'
http://hitmanhq.com/hitman/cheats/images/safe.jpg
[06:14:23] <archivist> I think I missed something, mainly the backlash in the rotary
[06:15:09] <archivist> just get some production bevels from HPC or similar
[06:16:01] <archivist> you only need rack and pinion probably
[06:16:09] <miss0r> That would be admitting defeat! It doesn't matter if this takes time to learn - That is all part of the fun... now where can I get a script/plugin that works with google skethcup 2014 that does all the work for me :)
[06:16:41] <miss0r> archivist: that 'would' be correct, if I was not planning to have a threaded rod doing the movement on the back
[06:16:47] <archivist> first get some real cad
[06:17:32] <miss0r> then get a masters degree in rotary physics... :)
[06:18:51] <miss0r> The annoying thing is, I found this ruby plugin promising to be able to do all the gears I want, but I can't seem to find a compatible version of it for 2014
[06:19:59] <archivist> any thin with ruby is incompatible one version to next
[06:20:52] <miss0r> i've never liked ruby anyway
[06:25:32] <miss0r> on the bright side, I just installed a wood stove in my tool shop :) it's nice not to get frostbitten while standing at the pc :)
[06:26:25] * jthornton has not had to light a fire yet this year
[06:26:33] <jthornton> but it looks soon
[06:27:04] <miss0r> Where are you from?
[06:27:47] <jthornton> south east Missouri
[06:28:46] <jthornton> http://www.gnipsel.com/shop/machines/machines.xhtml
[06:28:59] <miss0r> had to find it on a map :) Does it ever get that cold where you are?
[06:29:47] <jthornton> yea, gets pretty cold sometimes
[06:30:44] <miss0r> At the moment I am wondering where the cold weater will start. usualy we have freezing temperatures by now, but at the moment its around 50F and raining
[06:31:03] <jthornton> http://www.weather.com/weather/wxclimatology/monthly/graph/63901
[06:33:10] <miss0r> Doesn't look all that different from here:
http://www.worldweatheronline.com/Copenhagen-weather-averages/Hovedstaden/DK.aspx
[06:36:20] <Tom_itx> 40�F
[06:36:26] <Tom_itx> feels colder than that!
[06:38:15] <miss0r> that has something to do with humidity - I can only speak for my self; if the humidity rises anymore i'd have to wear a snorkel to breathe
[06:44:51] <miss0r> I need to add a fan to this stove - the heat is not quite getting around
[10:13:27] <JT-Shop> now I need to put the table saw back together
[10:14:40] <archivist> mine has been in bits since 2009
[10:17:35] <archivist> recently seen some of
http://www.newyankee.com/ on tv, lazy git never uses a manual tool
[10:18:47] <JT-Shop> spindle bearing went out on mine
[10:19:07] <JT-Shop> oh yea Norm
[10:19:48] <Rab> I read an interesting article on the energy usage/carbon footprint of CNC milling. Unfortunately I think it was authored by a nostalgia crank sentimental for manual milling.
[10:19:48] <JT-Shop> you should find the woodwrights shop he uses all manual tools
[10:19:53] <archivist> never needed mine for a while, took the legs etc off to bring home
[10:20:24] <JT-Shop> http://www.pbs.org/woodwrightsshop/home/
[10:21:57] <archivist> that is Roy Underhill, I lurk on the oldtools mailing list where all the manual galoots are
[10:31:02] <roycroft> roy is interesting
[10:31:16] <roycroft> he manages to bleed almost every show
[10:48:33] <SpeedEvil> Powertools are just better than handtools.
[10:48:42] <SpeedEvil> With powertools, you can cut your arm clean off.
[10:49:05] <JT-Shop> table saw cuts much better with new spindle bearings
[10:49:19] <archivist> not always, chisels are better for stabbing
[10:51:08] <Rab> Guillotine paper cutters always instill a hightened sense of awareness in me, whether they're powered or not.
[10:53:08] <Rab> http://www.mccunecollection.org/images/Equipment/Challenge%20Advance%20Guillotine%20Paper%20Cutter/%5B069%5D%20Guillotine%20Paper%20Cutter.jpg
[10:55:27] <roycroft> i think roy is a good woodworker
[10:55:32] <roycroft> he just doesn't perform well under pressure
[10:55:46] <roycroft> the projects he makes on his show are pretty sloppy
[10:58:12] <roycroft> it's hard to make something with only hand tools in 30 minutes
[10:59:54] <archivist> dont forget most of the effort ends up on the cutting room floor (edited out)
[11:14:08] <zeeshan|2> hi
[11:23:03] <zeeshan|2> asa helped me figured out what the heck this extra hydraulic fluid line is for
[11:23:20] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15067408304/
[11:23:33] <zeeshan|2> horizontal spindle!
[11:23:47] <roycroft> i think roy does a lot less editing than nahm
[11:28:54] <SolarNRG> hi guys, just to let u know thanks once again for all ur help last night, I spent all last night reading the manual on that PID and watched loads of videos and I got the system 100% fully operational, spent most of the morning finding an industrial electronics store got the solid state relay, soldered off the 3a relay inside and abridged the wires so it was outputting 12vdc from the PID to
[11:28:54] <SolarNRG> trigger the 240v 25A Solid State relay, carefully studied the wiring, and I switched it on, turns out that model didn't have an SC1 or it just had an SC to select the thermocouple type as it is only the basic PID controller model, bought a mini electric stove and turned the hob down to setting 2 at first I thought it wasn't working but after a while the PID locked onto the right temperature
[11:28:54] <SolarNRG> (55 in the test case) and when I came home it was solidly at 55 not going up or down. Seems the PID needs a few overshoots in order to work out how best to on/off the oven to get a steady temperature. Thanks u guys soo much but my next question is how do I ferment potatos?
[11:29:48] <SolarNRG> Oh when I first plugged it in and about to switch on for the first time I was real scared like, flicking the switch with a wooden broomstick handle but now I know I done my wiring correctly I'm real happy with it :))))
[11:33:44] <roycroft> solarnrg: two comments
[11:33:59] <roycroft> 1. ssrs leak voltage, and when they fail they almost invariably fail closed
[11:34:03] <roycroft> just be aware of that
[11:34:23] <SolarNRG> oooh so it could fail heating up and up and up?
[11:34:47] <SolarNRG> and like even in off mode u can still get a shock?
[11:34:47] <roycroft> on my pid-based switching systems i use a contactor in front of the ssr, so i can kill power to the contactor and be sure there is no voltage on the heating element
[11:35:03] <roycroft> you can also take an alarm output from the pid to kill power to the contactor
[11:35:14] <roycroft> 2. your pid has a learning mode
[11:35:37] <roycroft> where it overshoots, undershoots, etc. a number of times, and then auto-calculates the optimal pid parameters for your system
[11:35:50] <roycroft> the learning mode can take a long time but i recommend you run it
[11:36:10] <roycroft> especially if you're not familiar with pid controllers you should let it auto-train and not try to tweak the parameters yourself
[11:36:52] <roycroft> regarding my first point, some argue that there's absolutely no need for a contactor
[11:37:21] <roycroft> i would argue that when you're dealing with the kind of current that you are, a belt and suspenders approach, especially since contactors are so inexpensive, is prudent
[11:37:41] <roycroft> 25a isn't a huge amount of current, but it can cause damage or injury
[11:37:46] <SolarNRG> ok here's a photo of my setup have a look:
http://i.imgur.com/rZE0ZFb.jpg
[11:38:07] <roycroft> so you can take an alarm output
[11:38:23] <roycroft> a nc one
[11:38:25] <SolarNRG> the manual says thats what some of the outputs are for yeah u can hook the alarm up to a speaker
[11:38:37] <SolarNRG> but all the wires on the other side aren't hooked up except the Ktype
[11:38:39] <roycroft> program the pid to open the alarm contact when you get to, say 10c over your setpoint
[11:39:05] <roycroft> and run your contactor control line through that alarm contact
[11:39:17] <SolarNRG> well that's no good because the first time I ran it it went 18 degrees over the top
[11:39:24] <roycroft> if you overshoot by 10 degrees the contactor turns off and kills power to the ssr
[11:39:29] <SolarNRG> 2nd time it went 12 degrees ott
[11:39:32] <roycroft> i'm using an arbitrary number as an example
[11:39:33] <SolarNRG> 3rd time like 5 degrees
[11:39:45] <SolarNRG> ok ok
[11:39:45] <roycroft> and once you auto-tune the pid you probably won't overshoot like that any more
[11:39:47] <SolarNRG> I getcha
[11:40:02] <SolarNRG> every time I flick off at the mains will it forget?
[11:40:10] <roycroft> most pids remember
[11:40:23] <SolarNRG> or what if I'm heating a different pan, different volume, different composition of sludge?
[11:40:28] <roycroft> they store their current programming with nvram
[11:40:39] <roycroft> if you change any of that you need to retune the pid
[11:40:50] <SolarNRG> (nv) ??? Random Access Memory?
[11:40:52] <roycroft> if you switch around often i recommend you buy multiple pids
[11:41:02] <roycroft> non-volatile ram
[11:41:03] <SolarNRG> I thought when no power was in RAM it forgets everything
[11:41:13] <roycroft> depends on the type of ram
[11:41:19] <SolarNRG> cos I looked inside the PID couldn't see no flash card or nothing in there
[11:41:24] <SolarNRG> no hard drive for sure
[11:41:30] <roycroft> there will be a flash chip
[11:41:38] <SolarNRG> a bit like an atmega?
[11:41:38] <roycroft> it only needs a tiny amount of nvram
[11:41:44] <SolarNRG> or a pic
[11:41:45] <roycroft> something like that
[11:41:54] <pcw_home> could be flash in the CPU
[11:41:56] <SolarNRG> I thought that was eeprom !?
[11:42:07] <roycroft> could be
[11:42:11] <roycroft> i don't know your pid
[11:42:13] <roycroft> it doesn't matter
[11:42:21] <SolarNRG> its a rex c100
[11:42:26] <pcw_home> could be EEPROM in the CPU
[11:42:28] <roycroft> what matters is that it has some mechanism to store the parameters
[11:42:31] <SolarNRG> that's the make and model its the real deal japanese made
[11:42:42] <roycroft> honestly, i don't care
[11:42:59] <roycroft> it will store your settings
[11:43:02] <roycroft> that's what i care about
[11:43:10] <roycroft> how it does so is irrelevant
[11:43:14] <SolarNRG> tbh nether do I I jsut care about can I make some strong assed hooch before xmas day!?
[11:43:29] <roycroft> if you power cycle it it will remember its tuning and other parameters
[11:43:50] <SolarNRG> the theory is now it works, I want to use it to pre-boil the methanol off the hooch before cranking it up todistill the ethanol
[11:44:04] <roycroft> unless you live in new zealand, home distilling is illegal and i don't like to discuss illegal activities
[11:44:25] <roycroft> i prefer a don't ask, don't tell policy when it comes to things like that
[11:44:27] <SolarNRG> I am on an island in the mediterranian and distilling alcohol is not prohbited in this country :)
[11:44:52] <SolarNRG> they sell moonshine of their own (poorly done) at car boot sales here
[11:44:56] <SolarNRG> and pirate dvds
[11:45:09] <SolarNRG> 3rd world democracy :)
[11:45:20] <SolarNRG> in ur country maybe a problem but not here
[11:45:23] <zeeshan|2> roycroft: its legal to brew alcohol
[11:45:25] <zeeshan|2> for self consumption.
[11:45:30] <zeeshan|2> :-)
[11:45:35] <SolarNRG> and for freinds and family ;)
[11:45:43] <zeeshan|2> at least in canada it is.
[11:45:43] <zeeshan|2> :D
[11:46:16] <SolarNRG> besides out of a 2 gallon pressure cooker how much do u think I could honestly make? like a pint of spirits at best?
[11:47:28] <SolarNRG> its just a gimmick but I'm doing it as a hobby more than anything started off with desalinating sea water and someone suggested the idea and last night I got to work on the PID system
[11:47:42] <SolarNRG> I guess the temptation of making free booze was highly motivating for me
[11:50:50] <SolarNRG> I had that PID from like a year ago and sketched out when someone told me it could KILL me, but now I've put it all together it makes total sense now
[11:52:56] <SolarNRG> 2 questions: 1: can I use the PID to optimize the temperature of the pressure cooker for fermentation, i.e whatever the optimum is for yeast turning sugar into ethanol is like 35 degrees or whatever? And 2: Can Lexi use the PID system to make molten chocolate without burning it?
[11:56:25] <pcw_home> Its a temperature controller, so yes it can control temperature....
[11:58:01] <SolarNRG> What I made today is like sooooo useful, why don't normal ovens have this?
[12:23:41] <SolarNRG> oh yeah sorry if ur in the US who did u all vote for?
[12:25:55] <zeeshan|2> okay this is pretty frigging cool
[12:25:59] <zeeshan|2> apparently behind the vertical head
[12:26:07] <zeeshan|2> is a horizontal spindle
[12:26:14] <zeeshan|2> to turn the machine into a horizontal mill!
[12:26:23] <zeeshan|2> https://www.dropbox.com/sh/ti3t81sxkky36in/AACTgdKCui6iiMijDHfAkmFka?dl=0#lh:null-IMG_4828.jpg
[12:26:29] <zeeshan|2> it's more exposed in asah's machine
[12:26:31] <zeeshan|2> !seen asah
[12:26:31] <the_wench> last seen in 2014-10-28 06:08:13GMT 203:58:42 ago, saying Quit: asah
[12:29:00] <FinboySlick> zeeshan|2: Nifty scraping on that mill too.
[12:30:00] <FinboySlick> zeeshan|2: Did it come that way or was it re-scraped?
[12:33:22] <zeeshan|2> comes like that
[12:33:27] <zeeshan|2> not my mill
[12:33:34] <zeeshan|2> but its same on mine
[14:27:51] <f1oat> hello, just discovered Controllino (
https://www.kickstarter.com/projects/24519005/controllino-plc-arduino-compatible): can be very useful for our CNC machines
[14:30:23] <Zewwy> I love kickstarter
[14:30:30] <Zewwy> so many awesome ideas have come to life thanks to it
[14:30:52] <Zewwy> Like the Hack-RF
[14:32:15] <Zewwy> but that is the coolest PLC I've ever seen
[14:34:44] <Zewwy> only 44 hours to go...., oh awsome it just reached it pledge required... their timeline is amazingly short too... get your device by January? '15
[14:34:51] <f1oat> Yes, Hack-RF is nice. Airspy too, with 12 bits ADC
[14:35:25] <Zewwy> Haven't heard of teh Airspy....
[14:35:36] <PCW> why would you use a such a weak processor nowadays?
[14:35:56] <Zewwy> cost?
[14:36:03] <PCW> nope
[14:36:13] <Zewwy> availablilty?
[14:36:18] <PCW> nope
[14:36:28] <Zewwy> doesn't need any faster?
[14:36:35] <PCW> nope
[14:36:49] <CaptHindsight> obsession with AT mega?
[14:36:52] <Zewwy> are you saying its a flop before its begun
[14:36:57] <PCW> Bingo!
[14:37:14] <Zewwy> hahaha don't know which one was the bingo
[14:37:31] <CaptHindsight> obsession the new mindset
[14:37:44] <Zewwy> by calvin klein
[14:38:36] <CaptHindsight> $6 gets you a 1-2GHz 32b ARM soc with 2+ cores
[14:39:30] <CaptHindsight> and there are several micros with more power and features than ATmega for less cost
[14:40:03] <PCW> ~$3 gets you a 72 MHz arm with floating point and 4X 5 MS/sec 12 bit A-Ds
[14:40:59] <CaptHindsight> ST has several
[14:41:54] <Zewwy> 16 MHz is loking pethetic then
[14:42:08] <f1oat> Is there any alreay available opensource software PLC with ARM SOC ?
[14:43:14] <CaptHindsight> open source for what parts?
[14:43:30] <f1oat> the software
[14:44:54] <CaptHindsight> this can be an interesting discussion
[14:45:56] <CaptHindsight> most PLC applications require them to be easy to use and just work reliably over industrial conditions
[14:49:52] <f1oat> I agree, but depends on the context. For my own usage (hobby) I will be happy with a packaged PLC hardware and the hability to experiment with my own software.
[15:02:13] <JT-Shop> that is priced about 3 times what it is worth
[15:02:15] <JT-Shop> http://www.automationdirect.com/adc/Shopping/Catalog/Programmable_Controllers/CLICK_Series_PLCs_%28Stackable_Micro_Brick%29
[15:02:31] <JT-Shop> $69 and free programming software
[15:02:37] <JT-Shop> and industrial
[15:04:09] <CaptHindsight> I agree, but they are just making some quick money off the whole maker/DIY *duino fascination
[15:04:34] <CaptHindsight> it's not about making anything better, it's just pandering to that market
[15:08:42] <FinboySlick> If their software is okay, it seems like a great learning tool though.
[15:11:57] <f1oat> automationdirect: thanks, looks interesting too. I like the modular design.
[15:12:54] <MrSunshine> hmm in a closed loop stepper system .. what hapends when the drive faults ? as linuxcnc doesnt get any feedback information about position ... it wont know if it fauled at say -1mm from coded position and position errors will be there? or after a fault is a homing cycle done? =)
[15:13:51] <PCW> closed loop step drives have a fault output
[15:14:54] <MrSunshine> yes, but after a fault you cannot just try and resume right? but have to do a home cycle so the machine (liuxcnc) knows its position
[15:15:09] <MrSunshine> as the error can be off from programmed position when it faults
[15:15:10] <PCW> depends on the drive
[15:15:39] <MrSunshine> btw, anyone know about closed loop steppers vs open loop .. thinking rpm etc ? =)
[15:15:48] <CaptHindsight> a drive can fault for several reasons
[15:16:05] <PCW> same RPM limitation as normal stepmotors
[15:16:06] <MrSunshine> atm im running my open loop in 720rpm at full speed .. and id like to increase this =)
[15:16:39] <MrSunshine> PCW, from what ive read here and there it seems they can go alot faster tahn normal open loop steppers ?
[15:16:44] <CaptHindsight> if the drive faults and Linuxcnc doesn't get any encoder input then yes you'd have to Home it again
[15:17:38] <PCW> close loop will have the same torque curve
[15:17:44] <CaptHindsight> a steppers power output doesn't change if it's open or closed loop
[15:18:04] <CaptHindsight> if you need more power at higher rpm you might want to look at servos
[15:18:12] <PCW> its a motor /drive voltage characteristic
[15:18:18] <SpeedEvil> Aliens.
[15:18:27] <CaptHindsight> or find a stepper that has more power at the higher rpm
[15:18:41] <PCW> well a closed loop step motor drive _is_ a servo drive
[15:19:20] <CaptHindsight> but that depends on if you want to go from say 750rpm you currently top at and 900rpm or 3krpm
[15:19:31] <PCW> but its a 2 phase 50 pole servo drive
[15:20:06] <PCW> so if you want to go slow you chose a motor with lots of poles..
[15:20:45] <PCW> (like a step motor)
[15:20:54] <MrSunshine> been reading some about it and seems taht "pure" servo drives has overshoot problems ? or is that just a tuning thing ?
[15:21:12] <PCW> yes thats tuning
[15:21:12] <MrSunshine> while closed loop steppers have the same characteristics as ordenary steppers with dead stops etc
[15:21:26] <PCW> nope, same issues
[15:23:09] <PCW> one advantage of close loop step motor systems is that when idle they can go into a quasi stepmotor
[15:23:10] <PCW> mode and have some holding torque without +-1 encoder count dithering that servos often have
[15:23:54] <PCW> (better servo systems get around this with very high resolution encoders)
[15:24:05] <PCW> but thats $$
[15:24:40] <MrSunshine> but i wouldnt get any speed gains from a closed loop system? /: sure i want the closed loop anyhow but was hoping for some speed gain =)
[15:27:01] <CaptHindsight> whats the power range of your current stepper motor?
[15:27:46] <MrSunshine> hmm ..in holding torque its 1.8Nm
[15:28:01] <MrSunshine> (overclocked with 4.2A insted of 4A)
[15:28:06] <MrSunshine> so a slight bit more i guess :P
[15:28:37] <CaptHindsight> how much faster do you want to go?
[15:28:57] <CaptHindsight> 10%, 100%, 500%?
[15:28:58] <MrSunshine> atleast double my current speed
[15:29:04] <MrSunshine> 3600mm/min now ...
[15:29:55] <MrSunshine> the drive system is a 5mm lead ballscrew ... =)
[15:29:57] <CaptHindsight> have you run the numbers for the screws and loads to see if they can handle that well?
[15:30:55] <MrSunshine> nah ... stuff like that ive never thought of ... explain ? =)
[15:32:25] <CaptHindsight> http://www.thomsonlinear.com/downloads/articles/specifying_selecting_applying_linear_ball_screw_drives_taen.pdf
[15:33:57] <CaptHindsight> is this a retrofit machine or something DIY from scratch?
[15:34:17] <MrSunshine> DIY scratch
[15:35:09] <MrSunshine> i guess i could get higher speeds going away from ballscrews
[15:35:19] <CaptHindsight> did you buy a ballscrew positioner or did you buy a ballscrew and make the axis?
[15:35:22] <MrSunshine> get a butload of torque transfer with ballscrews =)
[15:35:35] <MrSunshine> CaptHindsight, huh ? ballscrew positioner? :P
[15:35:56] <CaptHindsight> have a pic of the machine?
[15:36:28] <CaptHindsight> how did you specify the ballscrew and motor that you are currently using?
[15:36:36] <MrSunshine> https://scontent-a-fra.xx.fbcdn.net/hphotos-xpf1/v/t1.0-9/1604955_10152153395928648_760491462_n.jpg?oh=62d03a9ca67d91d64c6a3f2d8d915de2&oe=54F7B25D does that link work ?
[15:36:48] <MrSunshine> CaptHindsight, i bought it, i put it on
[15:36:50] <MrSunshine> voila
[15:37:24] <CaptHindsight> which axis do you want to speed up?
[15:37:35] <MrSunshine> X and Y
[15:38:45] <CaptHindsight> what did you use for the linear bearings?
[15:39:03] <MrSunshine> those are V groove bearings
[15:39:17] <CaptHindsight> cam bearings?
[15:39:23] <PetefromTn_> Do those new hybrid stepper/servos have feedback that can be hooked to linuxCNC?
[15:39:26] <MrSunshine> what do you mean ?
[15:40:01] <PetefromTn_> I was under the impression they were just closed loop to the drive
[15:40:24] <CaptHindsight> http://www.mygoodstuff.com/kiit8353-2.jpg v-groove like this?
[15:40:41] <PetefromTn_> MrSunshine That looks like a pretty decent little router.
[15:40:47] <MrSunshine> CaptHindsight, yes
[15:41:10] <MrSunshine> PetefromTn_, thanks =) built with angle grinder, a drill press and hand tools =)
[15:41:43] <MrSunshine> and a lathe .. ofc :P
[15:41:45] <PetefromTn_> does the Vee groove bearing just use its weight to hold to the track or does it have dual bearings on top and bottom
[15:42:18] <MrSunshine> just weight and on the non driving end there is a spring support
[15:42:49] <PetefromTn_> I like it, looks like sort of a mini mechmate
[15:43:02] <MrSunshine> i want to change the system tho .. didnt like it very much as all instability (the Z is quite heavy so on the far end of X it sways when it accelrates)
[15:43:10] <MrSunshine> PetefromTn_, its inspired by mechmate
[15:43:23] <MrSunshine> tho built from my head =)
[15:43:27] <CaptHindsight> that will just get worse
[15:43:28] <PetefromTn_> I think that mechmate is a damn good design
[15:43:39] <MrSunshine> CaptHindsight, yes i know ...
[15:43:46] <CaptHindsight> it need to be more rigid
[15:43:51] <MrSunshine> but its the rapids i want to get higher speeds on
[15:43:56] <MrSunshine> atm
[15:44:15] <PetefromTn_> Can you add a bottom mount roller that is maybe spring loaded to hold it down or something
[15:44:41] <PetefromTn_> hard to tell from the picture how it is built
[15:44:58] <MrSunshine> https://fbcdn-sphotos-c-a.akamaihd.net/hphotos-ak-xpf1/v/t1.0-9/p417x417/1235506_10151856091283648_819951988_n.jpg?oh=8af091a2d61d8f4b5267a6149514ca02&oe=54E77F33&__gda__=1424853081_fa34438fd7c57a83f8b996c408adaa5d
[15:45:05] <MrSunshine> tho i changed it to be 1 .. the friction got very high
[15:45:19] <MrSunshine> that is non driving end
[15:45:41] <MrSunshine> hmm ... i might even have one on the driving end also
[15:45:56] <MrSunshine> https://www.facebook.com/system2/media_set?set=a.10151350043433648.504108.682103647&type=3 does that link work ? =)
[15:45:58] <PetefromTn_> oh so the long axis only gets driven from one end then
[15:46:16] <CaptHindsight> This content is currently unavailable
[15:46:49] <MrSunshine> PetefromTn_, Y movement is driven by two ends giving a wire in a cross pattern under the machine =)
[15:47:07] <MrSunshine> https://www.facebook.com/media/set/?set=a.10151350043433648.504108.682103647&type=1&l=c72ad877a2
[15:47:09] <MrSunshine> that then ?
[15:47:54] <MrSunshine> PetefromTn_, was only one side drive on the Y before ... and it almost derailed on fast turns :P
[15:48:41] <CaptHindsight> sounds like you're already past the design limits
[15:48:58] <PetefromTn_> yeah maybe you can adapt a second screw on the other end tied to the first one with timing belts or something.
[15:49:34] <PetefromTn_> I have seen that cross cable setup on copier machine mechanisms and it works okay for a lightweight movement but that is pretty heavy.
[15:50:42] <PetefromTn_> is that a 4x4?
[15:51:35] <PetefromTn_> looks pretty well built otherwise everything is steel and bolted or welded. I am going to build something like that mechmate at some point after I get this CNC lathe retrofit.
[15:51:37] <MrSunshine> CaptHindsight, well no mater ... i want to up the speeds .. if that fails i will lower them again .. if the machine can do it isnt important. . whats important is that the motors/drivers can do it =)
[15:52:02] <MrSunshine> PetefromTn_, whole machine envelop is about 160x160cm
[15:52:36] <MrSunshine> 5.3 feet i guess, and i can do 120x120 sheets in it ... that would be 4x4 right? =)
[15:52:48] <PetefromTn_> nice
[15:53:41] <PetefromTn_> so you are getting 140 IPM or so now. I can see why you would want to double that.
[15:53:42] <MrSunshine> but im going to build new machine in the future .. just started my own company and gonna try and get to sell some stuff i make with the machine ... to hopefully be able to first upgrade this one then start to build on a new one =)
[15:54:16] <MrSunshine> PetefromTn_, mm ... i can push the machine to 4500mm/min (motors) but then i get random stalls :/
[15:54:23] <MrSunshine> can go fine for an hour then wooom
[15:54:29] <PetefromTn_> stalls or missed steps..
[15:54:34] <MrSunshine> stalls
[15:54:53] <PetefromTn_> I would have thought you would be missing steps before you got to stalling.
[15:55:06] <MrSunshine> might be
[15:55:19] <MrSunshine> only thing ive noticed is hard stalling tho =)
[15:55:25] <MrSunshine> and then it ruins everything! :P
[15:55:34] <PetefromTn_> If you are running ballscrew drive on a machine that large you really would be better off with a servomotor
[15:56:46] <PetefromTn_> you will get a lot more potential speed without the torque dropoff and you would be able to run linuxCNC closed loop and not have to worry about missed steps.
[15:57:22] <MrSunshine> rack and pinion would be nice but
[15:57:33] <PetefromTn_> Most larger routers use either rack and pinion drive, timing belt drives, or something like that
[15:58:00] <MrSunshine> i bought timing belts that was supposed to go on the machine ... but never made it =)
[15:58:36] <MrSunshine> might be an option tho to put that on .. and closed loop steppers on that
[15:58:50] <MrSunshine> tho wouldnt one lose alot of torque ? =)
[15:59:03] <PetefromTn_> since it is already setup with ballscrew you would be probably better off just switching to servos on the X and Y at least it might be easier than rebuiding the whole drive system
[15:59:31] <MrSunshine> thing is that "rebuild" of the whole drive system isnt that hard =)
[15:59:34] <PetefromTn_> unless what you have is giving you problems and there are other reasons to change the drive.
[15:59:46] <MrSunshine> just put the timing belt under the rails stickout and jack the motor on there =)
[16:00:18] <PetefromTn_> yeah but you would need mounts, pullies, tensioners, etc etc.
[16:00:21] <MrSunshine> i have other projects i could use the ballscrews for later also ... cnc wood lathe ... small one =)
[16:01:22] <MrSunshine> PetefromTn_, not a problem ... as ive built the machine so far and everyhthing is built to be bolt on =) the "shield" that holds the ballnut is exchanged with one that would hold the motor and a couple of pulleys =)
[16:01:45] <MrSunshine> https://fbcdn-sphotos-g-a.akamaihd.net/hphotos-ak-xfp1/v/t1.0-9/1005366_10151836852923648_362473394_n.jpg?oh=c9aea9ab942d107c985ecaa3f7dc0990&oe=54D6AFC1&__gda__=1425564059_e251caeff8fd678e2cbe036f8b78163d that thing =)
[16:02:25] <MrSunshine> might actualy be a fun project in the dark of winter here =)
[16:02:29] <PetefromTn_> well that is your decision man. Just making suggestions.
[16:02:40] <MrSunshine> as ive got the belt ... all i need is a pulley =)
[16:03:07] <PetefromTn_> you might find that while the ballscrew setup is slow you are probably getting reasonably good accuracy from it
[16:03:33] <MrSunshine> im getting hell of a good acuracy of it ... thats a big plus with ballscrew =)
[16:03:38] <PetefromTn_> yeah
[16:03:55] <PetefromTn_> like I said if it were mine I would probably just get speedier motors LOL
[16:04:20] <PetefromTn_> but I have a reputation for loving servos and closed loop :D
[16:04:36] <MrSunshine> but servo system is atleast double the money from closed loop steppers
[16:04:55] <MrSunshine> and then i need a servo control card for the pc i guess also
[16:05:22] <PetefromTn_> actually if you are going chinese hobby stuff you might find there is not that much difference in price at least that is what I have found on the larger more powerful motors
[16:07:01] <PetefromTn_> my new lathe I just bought has nema 34 motors and came with AC servos.
[16:07:18] <PetefromTn_> they were like 750 watt but only about 410 OZ in torque
[16:07:29] <PetefromTn_> so I have been eyeballing all motor options
[16:08:04] <PetefromTn_> The closed loop steppers are just a bit less money than a servo motor and driver.
[16:08:56] <MrSunshine> any drives/motors you could recommend then ?
[16:09:26] <PetefromTn_> meh the usual suspects. All chinese for price considerations.
[16:09:40] <PetefromTn_> I hear good things about the DMM servos and drives
[16:09:56] <PetefromTn_> My Cincinatti has Teco motors and drives but they are more commercial larger motors
[16:10:08] <PetefromTn_> Are you using nema 23 or 34 or what?
[16:10:27] <MrSunshine> 23 the machine is made for atm ... tho i coul dmake new motor mounting plates
[16:10:55] <PetefromTn_> my RF45 had Keling inc 1100 OZ in motors that were brushed DC servos.
[16:11:29] <PetefromTn_> If you are not running in a coolant environment they would work quite well but the brushed motors need maintenance on the brushes occasionally
[16:13:12] <PetefromTn_> you would probably double your speed easily and have closed loop feedback with that ballscrew but it would take a lot of work and setup as you said. I understand the closed loop steppers are not really any faster or more powerful than typical steppers
[16:14:13] <PetefromTn_> which begs the question, if a PROPERLY setup stepper machine does not loose steps then what is the point of a closed loop stepper other than the fact that you will know when it loses steps..
[16:15:11] <MrSunshine> PetefromTn_, well its not fun to ruin work that might have been in the machine for hours just cause i didnt have closed loop =)
[16:15:28] <PCW> Efficiency is one advantage and potentially higher accuracy
[16:15:32] <PetefromTn_> Believe me I understand completely
[16:15:57] <PetefromTn_> how is the closed loop stepper more efficient or potentially more accurate>?
[16:16:39] <PCW> plus a closed loop step drive cannot really stall in the same way that a open loop step motor can
[16:17:07] <PetefromTn_> how is it more efficient or accurate?
[16:17:09] <MrSunshine> i think its there that the speed gain that ive read about comes from
[16:17:16] <MrSunshine> that it wont stall out
[16:17:25] <PCW> more efficient since like a normal servo, motor torque is only applied when needed
[16:17:25] <MrSunshine> and if it does realy stall out it errors
[16:18:03] <MrSunshine> hell ill test a closed loop stepper system ... its only 5500sek payed and done for .. if it doesnt work i have some more electronics to play with later :P
[16:18:10] <PetefromTn_> I thought a stepper only applies torque when it is being driven
[16:18:24] <PCW> an open loop applies full current all the time (its trying to pull the rotor apart)
[16:18:33] <MrSunshine> a closed loop stepper is supposed to be more like a servo as far as i can tell
[16:18:44] <PCW> it _is_ a servo
[16:19:19] <MrSunshine> ok then =)
[16:20:26] <PCW> when an open loop step drive is not moving, full current is appled so full force is applied to the rotor (but the force is radial)
[16:20:28] <PetefromTn_> I really don't understand how the hybrid steppers work. I was under the impression they were just a Stepper IE multi pole motor with encoder and that the drive just senses the position error and faults if it gets beyond a certain point.
[16:20:52] <CaptHindsight> just for reference a used AC servo motor and drive would be <$1k ea
[16:21:12] <PCW> close loop step drives are just special servo drives
[16:21:32] <CaptHindsight> including the encoders
[16:21:47] <PetefromTn_> CaptHindsight I bought my LARGE commercial AC motors, drives and premade cables for less than that.
[16:22:08] <CaptHindsight> good deal
[16:22:32] <PetefromTn_> you can buy AC servo and drive packages in Nema 34 for like $400 delivered on ebay nowadays
[16:23:43] <CaptHindsight> AC servo? or DC
[16:23:47] <PetefromTn_> AC
[16:24:57] <CaptHindsight> have a link?
[16:25:29] <PetefromTn_> http://www.ebay.com/itm/130ST-M06025-1-5KW-6N-M-AC-servo-motor-kits-include-servor-motor-and-servo-drive-/161454973954?pt=LH_DefaultDomain_0&hash=item2597776402 Trying to find one But here is a much larger more powerful one
[16:25:52] <PetefromTn_> http://www.ebay.com/itm/NEW-750W-0-75KW-ac-servo-motor-servo-driver-2-39N-M-80ST-80ST-M02430-3000RPM/161454973914?_trksid=p2047675.c100010.m2109&_trkparms=aid%3D555012%26algo%3DPW.MBE%26ao%3D1%26asc%3D27538%26meid%3Dd50edf527fc9448488e2392fe74bfc03%26pid%3D100010%26prg%3D11353%26rk%3D7%26rkt%3D24%26sd%3D161454973954
[16:26:02] <Deejay> gn8
[16:26:58] <CaptHindsight> thanks
[16:27:39] <MrSunshine> PetefromTn_, what more would one need then ? some kind of control card ?
[16:27:57] <PetefromTn_> I have no experience with these but there are many like that. Basically unless you spend a LOT more money everything is made in China for this nowadays.
[16:28:21] <PetefromTn_> Well I use the Mesanet stuff
[16:28:33] <PetefromTn_> 5i25/7i77 for closed loop servo control
[16:28:40] <CaptHindsight> http://www.ebay.com/itm/YASKAWA-SGMPH-15AAA2C-AC-Servo-Motor-1-5kW-1500W-/121237842058 $362
[16:29:11] <PetefromTn_> yeah I saw those. They don't have actual photos and they are used items unfortunately
[16:30:31] <PetefromTn_> It amazes me that when you look at all the different motors and drives offered on like Alibaba that we are not flooded with companies reselling this stuff here.
[16:31:02] <PetefromTn_> Can it all be junk? I guess maybe but who knows...
[16:31:32] <PetefromTn_> I know my Teco stuff is all chinese and it works looks and feels great.
[16:32:01] <MrSunshine> so a complete system for 2 axes for me would be like 10000sek ..that once again is double the closed loop stepper :P
[16:32:08] <MrSunshine> tho i might get 3 times the speed ...
[16:32:27] <PetefromTn_> how is it double the closed loop stepper?
[16:32:39] <MrSunshine> 5500sek for closed loop steppers
[16:33:03] <PetefromTn_> for what size and torque rating? Do you have a link?
[16:33:16] <MrSunshine> 4Nm
[16:33:21] <MrSunshine> its from zapp automation
[16:33:41] <PetefromTn_> Also keep in mind that unless I am mistaken you have to have power supplies for the steppers which you most likely already have since you are already stepper.
[16:33:41] <MrSunshine> http://www.zappautomation.co.uk/es-d808-easy-servo-drive.html
[16:33:55] <MrSunshine> 3Nm ... it was
[16:34:07] <MrSunshine> http://www.zappautomation.co.uk/es-m22430-3nm-holding-torque.html
[16:34:12] <PetefromTn_> But the servo drives are usually 220v input direct and need no power supply
[16:34:17] <MrSunshine> yeah but my psu might be a bit underpowered if i up the steppers
[16:36:09] <PetefromTn_> where are you located?
[16:36:33] <PCW> If you use close loop you may not need so large a supply
[16:37:27] <PetefromTn_> Those look to be like the leadshine drives I think or at least have the similar case. I hear good things about them.
[16:40:47] <MrSunshine> PetefromTn_, sweden
[16:41:09] <PetefromTn_> aah
[16:41:21] <MrSunshine> there are leadshine drives that goes for 230VAC also but those gets a bit more expensive =)
[16:42:53] <MrSunshine> like i said .. ill try them out ... atleast to get my own experience ... i will get a slew of money here in a month or so ... will buy both the closed loop stepper drivers and vectric aspire software =)
[16:44:30] <PetefromTn_> Well in that case go for it. I am curious how they work for you. I am not ANTI stepper really at all just that there are certain situations where a stepper is the best choice and ones where it is not. It would be wonderful to know that a hybrid stepper system can actually work like a servo system at a much lower cost
[16:45:08] <renesis> feedback steppers are weird
[16:45:12] <PetefromTn_> for the size and power of motors I am needing that does not seem to be the case so far that I have seen
[16:45:33] <renesis> with servos, youre not where you want to be, you push harder until youre where you want to be or your give up
[16:45:43] <renesis> with steppers, its probably the opposite
[16:45:49] <PetefromTn_> the price of a suitable sized stepper motor to servo motor complete with driver brand new is not all that different
[16:46:09] <renesis> if youre not where you want to be, you prob pushed too hard, better to back off
[16:46:24] <PetefromTn_> renesis Do you have a system running feedback steppers?
[16:46:33] <renesis> no open loop
[16:46:45] <renesis> you push too hard, it skips
[16:46:47] <PetefromTn_> Okay
[16:47:38] <renesis> just interesting that they react differently to loading and more input
[16:47:46] <PetefromTn_> for slower speed motors with good holding torque when properly sized an open loop stepper system can be just perfect really
[16:48:07] <Connor> Pete nema 23 or nama 34 ?
[16:48:36] <Connor> http://www.automationtechnologiesinc.com/products-page/nema34-closed-loop-stepper-motor-system-hybrid-servo-kit/nema-34-hybrid-servo-motor-kl34-8n-1000-rated-torque-1128-oz-in
[16:48:40] <renesis> well, if i dont feed stupid deep and i dont rapid at more than 3/4 what it can racing around for speed, i dont have issues
[16:48:44] <PetefromTn_> well like I said I can put whatever I want but the motors that were on there are 3" square faced which is like Nema 34 mostly
[16:48:52] <renesis> like, its actually pretty mind blowing how well it does
[16:49:24] <PetefromTn_> Connor Yeah I have seen all of those.
[16:49:36] <PetefromTn_> You still have to add in the cost of the power supply
[16:49:39] <renesis> oh that kids makes the drive look like a servo?
[16:49:47] <renesis> *kit
[16:49:58] <PetefromTn_> and the cost is just a bit less than that servo setup I just posted
[16:50:34] <renesis> seems neat if you already have the stepper
[16:50:44] <Connor> and, it's only closed loop to the driver..
[16:50:55] <PetefromTn_> worst part is if you look at the torque curves it drops off pretty badly at any real speed.
[16:50:59] <renesis> its step/dir open loop input?
[16:51:17] <renesis> does it have some sort of fault signal?
[16:51:25] <PetefromTn_> apparently
[16:51:45] <PetefromTn_> They would be a lot more appealing if you could close the loop back to linuxCNC
[16:52:06] <Connor> you can close loop a stepper to linuxcnc.
[16:52:22] <PetefromTn_> as it is they are not any different from my Gecko G320's and brushed DC servos
[16:52:28] <PetefromTn_> with Mach3
[16:52:43] <PetefromTn_> I could only hope to get a fault when the motor was not cooperating
[16:52:44] <Connor> you use a normal open loop control.. but, run the stepper in velocity mode vs step/dir(still uses step/dir to move servo) and take the encoder input into linuxcnc
[16:53:13] <PetefromTn_> you can do that with the new drives?
[16:53:34] <Connor> I could do that with MY drives.. no need to a closed loop driver
[16:53:35] <PetefromTn_> at least you would have some kinda feeback
[16:53:56] <PetefromTn_> are you going to do that with your build now?
[16:54:04] <Connor> No. No encoders
[16:54:09] <renesis> right if i was going to go through the trouble of putting encoders on steppers, id want the controller to be able to try and fix something
[16:54:16] <renesis> or at least know how bad shit is
[16:54:35] <renesis> as opposed to just having a stop signal
[16:57:09] <Tom_itx> Connor how do you handle reverse on your spindle?
[16:57:21] <Tom_itx> or does it just work...
[16:57:30] <Tom_itx> i'm thinking of adding a relay to mine
[16:57:52] <Tom_itx> not sure the mosfets will like it if i don't stop before reversing
[16:58:01] <Connor> I have a kbcc-125r 2 Relays.. one for on/off.. on for cw/ccw
[16:58:22] <Connor> but, the relay doesn't reverse the DC load.. it toggles the reverse on the Reversing module on the controller.
[16:58:35] <Tom_itx> oh
[16:58:52] <Connor> http://www.kbelectronics.com/manuals/kbcc_manual.pdf first page explains
[16:58:56] <Tom_itx> why do you need a relay to switch the controller?
[16:59:02] <Tom_itx> it's not ttl level?
[16:59:20] <Connor> They set it up for switches (low current switches)
[16:59:52] <Tom_itx> i saw a nice motor for a sherline but they cost way too much
[17:00:14] <Connor> To be honest. I probably could replace the spindle controller with a Brushed DC Servo Amp and be better off.
[17:00:32] <Tom_itx> you think that would work on my dc motor?
[17:00:51] <Connor> the KBCC-125R or DC Brushed servo amp ? :)
[17:01:10] <Tom_itx> i'd need a supply if i went with the DC brushed servo amp
[17:01:23] <Tom_itx> rather use line voltage into the control
[17:01:37] <Connor> Not much of one.. just something to rectify it to DC, and maybe a few caps.
[17:01:52] <Connor> unless the DC Brushed servo amp couldn't handle a full 120v
[17:02:15] <Connor> Your spindle have a encoder on it ?
[17:02:18] <Tom_L> the motor is rated for 90v
[17:02:26] <Tom_L> not with an index
[17:03:18] <Connor> You could still use 120v.. I think you could just limit the RPM
[17:03:21] <Connor> I think
[17:03:37] <Connor> why no index ?
[17:04:36] <Tom_L> made from a printer encoder
[17:06:03] <Tom_L> http://www.glockcnc.com/sherline%20taig%20motor%20upgrades.htm
[17:06:45] <Tom_L> http://www.glockcnc.com/sherline%20headstocks.htm
[17:07:09] <Connor> What is this for ? You have a sherline ?
[17:07:16] <Tom_L> yeah
[17:09:59] <PetefromTn_> That would make a SWEET live tooling addition to a CNC lathe heh
[17:19:22] <Computer_Barf1> Connor: do you think that the G0704 has the potential to be a profitable machine?
[17:19:45] <Connor> Computer_Barf1: Yes.
[17:19:54] <Connor> But, not sure HOW much so.
[17:20:57] <Computer_Barf1> yes ive been thinking so too but as a matter of what you make with it. Working out the margins on things seems like it would take some real live experimentation
[17:21:29] <Computer_Barf1> *life not live.
[17:21:32] <JT-Shop> if you have a market for whatever you make it can be profitable
[17:21:46] <Connor> It would.. and to speed up production, you would make tooling fixtures..
[17:22:07] <Computer_Barf1> you mean like an plate with pins?
[17:22:50] <Connor> Or custom fixture to hold the specific part.. after a specific operation so you didn't have to indicate off the part again.. etc etc.
[17:23:53] <Computer_Barf1> I was thinking about the combination of casting aluminum + milling
[17:24:38] <Computer_Barf1> I mean, if your aluminum source is too expensive, it could have a significant effect on the cost of your final product
[17:27:44] <Computer_Barf1> you could start buying aluminum from people at scrap cost , melt, pour into plates, face, flip over, face again, cut out something, PROFIT
[17:30:40] * JT-Shop would not want any parts that used home cast aluminum... too many defects and poor material with not specs
[17:30:59] <Computer_Barf1> I would think it would depend on what it is
[17:31:24] <Computer_Barf1> btw guys im selling a mars rover wheel assembly if any one wants a good deal
[17:33:15] <MrSunshine> renesis, closed loop steppers push harder to get to where they want to be
[17:33:24] <PetefromTn_> When it comes to creating and desiging a product for CNC machininig and profit in reality the aluminum it takes to make it in most circumstances is a very small part of the overall picture. At least it has been that way for me on many different products and projects.
[17:33:26] <Computer_Barf1> im just kidding, im only selling carabiners and load bearing climbing gear
[17:33:41] <MrSunshine> https://www.youtube.com/watch?v=ZMZdCcLQc4M
[17:33:56] <JT-Shop> MrSunshine, steppers can only push so hard then then stall
[17:34:15] <MrSunshine> JT-Shop, closed loop
[17:34:26] <JT-Shop> don't matter a stepper is still a stepper
[17:34:31] <Computer_Barf1> PetefromTn_: I guess then the aluminum price is much better in bulk. Looking at some stuff on ebay it's like the expense of the aluminum could be much of the products value.
[17:34:33] <MrSunshine> seem to have some more algorithms to get out of stall then
[17:34:40] <MrSunshine> or atleast tehy fault
[17:35:01] <SpeedEvil> Computer_Barf1: it depends what you mean by bulk
[17:35:08] <MrSunshine> but i think they can give some extra grunt just like ordenary servo systems to try and push to position
[17:35:14] <MrSunshine> if they fail they error
[17:35:34] <SpeedEvil> Computer_Barf1: you've got ebay/amazon price, then you've got the price if you buy a bar at your local metal merchant - then you've got the price if you bring in acontainer from china
[17:35:42] <PetefromTn_> I have never bought aluminum in anything that could realistically be referred to as BULK...
[17:36:04] <SpeedEvil> I was surprised that I was quoted twice the spot price for only 2kg of lithium
[17:36:08] <SpeedEvil> From alibaba
[17:36:33] <Computer_Barf1> yes what i mean by bulk is the quantity a small buisness would consume, not bulk as in full containers from china
[17:37:09] <renesis> 03:15:40 < MrSunshine> renesis, closed loop steppers push harder to get to where they want to be
[17:37:24] <renesis> mrsunshine: harder basically means faster because current is usually fixed
[17:37:35] <SpeedEvil> harder better faster stronger.
[17:37:37] <renesis> steppers have problems with faster, they lose steps
[17:38:06] <MrSunshine> renesis, steppers current is dependant on voltage ... if you feed 40 volts into a stepper the current will be faar greater :P
[17:38:07] <SpeedEvil> sometimes
[17:38:09] <PCW> They lose torque, this is not chanegd by feedback
[17:38:20] <renesis> as opposed to a servo, where if youre behind because of load, you up current and get the motor to spin faster
[17:38:23] <JT-Shop> steppers have the highest torque when standing still and doing nothing
[17:38:29] <renesis> the servo isnt going to go slower giving it more current
[17:38:37] <SpeedEvil> Most sane drives use constant current, not voltage to drive them
[17:38:52] <PCW> Peak torque of a servo = stepper rated stall torque
[17:38:52] <SpeedEvil> A '40V' drive does not put any more current through the stepper than a 20V drive
[17:38:54] <Computer_Barf1> http://www.cnczone.com/forums/benchtop-machines/157385-ryans-g0704.html
[17:38:55] <renesis> mrsunshine: what jt said
[17:39:02] <SpeedEvil> it will simply go faster at higher torque
[17:39:26] <Computer_Barf1> i found this thread to be interesting on the g0704, he used something in is electronics called a kflop
[17:39:29] <renesis> it has more kick to make the current happen faster through an inductive load
[17:39:39] <renesis> its like transconductance amps versus standard amps
[17:39:40] <Computer_Barf1> wondering what Connor: thinks of the kflop
[17:40:02] <Connor> Computer_Barf1: kflop = mach3
[17:40:16] <Connor> Computer_Barf1: Or some other Control.. I don't think LinuxCNC works with it.
[17:40:23] <Computer_Barf1> wahh wahh.
[17:40:31] <MrSunshine> the current in a stepper is set by the time the voltage is supplied to the coils
[17:40:31] <MrSunshine> sure if you go for rated voltage .. 2V 5A .. then yes. . its limited to 5A
[17:40:31] <MrSunshine> but push 40V for a given time into the windings and you will have some great fire power :P
[17:40:49] <JT-Shop> MrSunshine, look at the torqe vs speed charts here
http://www.automationdirect.com/static/specs/surestepmotors.pdf
[17:40:52] <PCW> I think they have their own control (and Mach)
[17:41:07] <renesis> right but you dont typically vary current into the coils
[17:41:21] <renesis> well, you split current with microstepping
[17:41:32] <renesis> but youre not varying voltage to do it, youre varying pulse times
[17:41:59] * MrSunshine has written a micro stepper in avr ... and made his amp board for it =)
[17:42:00] <MrSunshine> yeah!
[17:42:04] <MrSunshine> fun stuffs to play with
[17:42:06] <MrSunshine> it sucked tho :P
[17:43:33] <MrSunshine> https://www.youtube.com/watch?v=F0TjS0N0rwc =)
[17:44:11] <renesis> anyway, you shouldnt be holding back on current in normal lose speed operation
[17:44:22] <renesis> *low speed operation
[17:44:47] <renesis> like, if you have more current available to help with skips, you wouldnt have skipped in the first place if you used all current
[17:45:13] <MrSunshine> renesis, more current == more heat
[17:45:24] <renesis> um, yes
[17:45:24] <MrSunshine> for very short burts the coils can take higher current than rated
[17:45:38] <renesis> well thats another convo entirely
[17:45:46] <renesis> servo you fix error from loading by adding more power
[17:45:55] <renesis> steppers you fix error from loading by decreasing feed rate
[17:45:59] <PetefromTn_> I must admit that video showing the leadshine closed loop stepper is impressive
[17:46:08] <MrSunshine> yes, but does a closed loop stepper drive do that ?
[17:46:20] <renesis> hopefully linuxcnc does it
[17:46:20] <MrSunshine> overload for short periods to try and get out of a stall condition
[17:46:27] <MrSunshine> renesis, closed loop driver ...
[17:46:30] <renesis> prob a coin toss with external modules
[17:46:35] <MrSunshine> not feeding anything back to linuxcnc more than errors
[17:46:38] <renesis> it likely doesnt have the capability
[17:46:51] <renesis> because it cant signal the controller to slow down the other axis
[17:46:55] <PCW> No because you cannot exceed the full step motor current without risking demag
[17:46:59] <MrSunshine> PetefromTn_, i find that video quite interesting and its one of the reasons in concidering closed loop steppers
[17:47:06] <renesis> and i guess that is why closed loop driver, open loop control is strange
[17:47:25] <renesis> it cant fix things
[17:47:28] <renesis> it can only stop things
[17:47:37] <MrSunshine> renesis, that is true that it doesnt
[17:47:39] <renesis> so its a convenience thing? change your steppers to vector
[17:47:58] <PetefromTn_> I agree it is strange but the video shows it can maintain position to a point really well. I have no idea really how a typical stepper would react to that kind of abuse.
[17:47:59] <renesis> i dont know that linuxcnc will actually throttle back steppers in a closed loop system
[17:48:09] <renesis> but if i can figure it out, im pretty sure the devs can
[17:48:32] <MrSunshine> PetefromTn_, with the turn he does on that first thing he does a normal stepper would lose position instantly
[17:48:33] <MrSunshine> and take the closest cog it could
[17:48:40] <MrSunshine> that is energized
[17:48:51] <PCW> you could copy the encoder data back to linuxcnc
[17:48:56] <PetefromTn_> and it would not try to drive back to position
[17:49:00] <renesis> so this thing tries to go twice as fast to catch up?
[17:49:19] <MrSunshine> PetefromTn_, nop it would not
[17:49:25] <MrSunshine> as an open loop doesnt know where it is
[17:49:33] <renesis> because that wont work with steppers, if it skipped, trying to make it go faster is prob not going to work all the time
[17:49:38] <MrSunshine> its totaly happy with being 15 degrees off as long as the coils are energiezed :P
[17:49:48] <PCW> its a servo, it can be off 100 turns and catch up if its FE limits are large enough
[17:50:50] <MrSunshine> oh well i will try the freakin things and report how they work ... as it seems no one here has tried closed loop steppers? =)
[17:50:59] <renesis> right because a servo you just give it all its got and if it cant catch up, you stop
[17:51:05] <PCW> Ive built them
[17:51:17] <MrSunshine> PCW, copying back encoder position to linuxcnc seems nice .. =)
[17:51:20] <MrSunshine> PCW, you ahve ?
[17:51:22] <MrSunshine> have
[17:51:48] <PCW> years ago (SoftDMC/7I32 will do closed loop)
[17:53:00] <MrSunshine> closed loop steppers is the most affordable for me now anyhow .. so i will try them ... its nice to get some own experience to as how they work .. what tehy are capable of etc also =)
[17:53:06] <MrSunshine> servo systems gets 2x as expensive fast
[17:54:25] <MrSunshine> oh well now its time to sleep, thanks everyone who has been feeding information for your inputs! =)
[18:29:50] <Computer_Barf1> is it certain that Kflop can't be used with linuxcnc?
https://www.youtube.com/watch?v=dYKdF5R53e0
[18:38:10] <Connor_iPad> Computer_Barf1: Why bother? Just use Mesa.
[18:38:57] <Computer_Barf1> seemed like it had more axis possiblities, more encoder stuff, more stuff.
[18:39:07] <Computer_Barf1> just looking at all options
[18:39:45] <Connor_iPad> You need to look at all the Mesa products.
[18:39:56] <Connor_iPad> Way more flexible.
[20:38:19] <ve7it> Jymmm, latest cnc/fishing project
http://members.shaw.ca/swstuff/cannon-ball.html
[20:38:52] <ssi> yawn
[20:38:52] <the_wench> wake up ssi
[20:39:03] <Jymmm> ve7it: Looking...
[20:40:38] <Jymmm> ve7it: Nice. Going to use them to run a longwire antenna up on a tree =)
[20:41:39] <ve7it> I would like to see the sling shot to fire those
[20:42:02] <Jymmm> ve7it: HAHAHAHA, Built it, and they will fly!
[20:42:06] <ve7it> (more like running a long wire down to some cod fish!)
[20:42:20] <Jymmm> ve7it: Ah, VLF
[20:42:37] <ve7it> how have you been?
[20:43:19] <Jymmm> ve7it: Pretty good, picked up a MFJ versatuner, still haven't gotten on the air yet =)
[20:44:04] <ve7it> 10m has been hot.... listened to Malaysia this afternoon
[20:44:57] <ve7it> Japan, Alaska, down the west coast and a lot of the midwest was booming in
[20:45:24] <Jymmm> ve7it: Nice, just haven't had time to setup/run everything. I probably should before solar flares knock out HF for years
[20:46:12] <Jymmm> ve7it: Actually I want the new toy coming out soon
[20:46:50] <Jymmm> ve7it:
http://www.universal-radio.com/catalog/hamhf/3991.html
[20:47:20] <ve7it> The smoke escaped out of my Icom 781.... was just listening and I saw blue arc light on the wall behind the rig... hit the off button... still too afraid to take the covers off and see what cooked... it should be very obvious
[20:47:21] <Jymmm> ve7it: Was 2014Q4, then they changed it to 2015Q1
[20:47:55] <Jymmm> ve7it: OUCH, that's never a good thing. especially Rx only too.
[20:48:52] <ve7it> looks nice, but I am partial to Icom and Kenwood..... my brain just doesnt mesh with the Yaesu menus and modes
[20:49:22] <ve7it> any idea on $$$
[20:49:42] <Jymmm> ve7it: LOL, Well it's the replacement for the 897D, and I lie the mobil/portable idea plus builtin ATU and bandscope
[20:50:03] <Jymmm> ve7it: Yeah. MSRP $2400
[20:50:24] <Jymmm> USD
[20:50:40] <ve7it> ouch
[20:51:04] <Jymmm> ve7it: Tell me about it, but that's still rumor, we'll see.
[20:52:09] <Jymmm> ve7it: If so, it'l probably be my first and last HF rig I'll buy off the shelfs
[20:52:45] <ve7it> looks like USB and serial port interfaces... cool, somebody is finally getting modern..... now bluetooth to a tablet interface would be cool
[20:53:03] <Jymmm> ve7it: It has a touchscreen already
[20:53:49] <Jymmm> ve7it: I had been waiting for the USB though, should be nice for CAT
[20:54:39] <ve7it> hey... just got the dinner call... catch ya later
[20:54:48] <Jymmm> ve7it: 73
[21:25:28] <zeeshan|2> hi
[21:25:34] <zeeshan|2> ssi: wake up :D
[21:26:49] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15536209378/
[21:26:51] <zeeshan|2> its mounted :D
[21:26:56] <ssi> good
[21:27:09] <zeeshan|2> where you been dude
[21:27:12] <zeeshan|2> i know youre done moving
[21:27:14] <zeeshan|2> you beter be done moving
[21:27:17] <zeeshan|2> youve been moving for a month
[21:27:24] <ssi> still plenty of work to do
[21:27:33] <zeeshan|2> damn
[21:27:34] <ssi> trying to get crap shuffled around and machines placed
[21:28:58] <zeeshan|2> are you almost done?
[21:29:17] <ssi> hahahahah no
[21:29:25] <ssi> it'll be the rest of the year before I'm done
[21:30:18] <zeeshan|2> =/
[21:30:24] <zeeshan|2> i want you back to cnc mode :(
[21:30:28] <ssi> tryin
[21:30:44] <zeeshan|2> every night i'm stuck talking to XXCoder
[21:30:45] * zeeshan|2 hides
[21:30:48] <ssi> haha
[21:30:48] <zeeshan|2> i joke XXCoder
[21:31:00] <ssi> I've been freakin exhausted every night
[21:31:03] <ssi> I probably would be asleep already
[21:31:09] <ssi> but I've been reading online about gold recovery
[21:33:22] <zeeshan|2> trying to recover gold from pcb circuit boards? :D
[21:33:43] <ssi> all the wirewrap pins and pcb board-to-board pins from the HNC control are gold plated
[21:33:46] <ssi> and there's a PILE of them
[21:34:07] <zeeshan|2> they really didnt f around with electronics back then eh
[21:34:13] <ssi> nope!
[21:34:16] <zeeshan|2> lets make this pin out of SOLID GOLD!
[21:34:19] <jdh> cheap gold!
[21:34:20] <ssi> well gold was $35/oz then
[21:34:32] <zeeshan|2> well if you prolly account fo rinflation
[21:34:38] <zeeshan|2> it was prolly more expensive than say silver
[21:34:39] <zeeshan|2> and aluminum
[21:34:41] <zeeshan|2> a lot more
[21:35:12] <Tom_itx> always has been
[21:35:22] <zeeshan|2> lies
[21:35:24] <XXCoder> lol
[21:35:31] <zeeshan|2> i thought silver was more expensive back in the day
[21:35:38] <zeeshan|2> 1000 years ago
[21:35:44] <zeeshan|2> XXCoder: i was kidding
[21:35:45] <zeeshan|2> :{
[21:35:49] <CaptHindsight> probably less than a few microns thick
[21:36:13] <zeeshan|2> i cant decide
[21:36:15] <zeeshan|2> fans on bottom
[21:36:21] <zeeshan|2> or fans on top (suck mode)
[21:37:08] <XXCoder> pfft not even plantium is most expensive element
[21:37:46] <XXCoder> and yes at certain era, aluminium was actually more expensive than gold
[21:38:02] <XXCoder> it was very hard to make. then someone invented easy and cheap way
[21:49:36] <Tom_itx> so it was:
http://knowledgenuts.com/2014/02/27/the-metal-that-was-once-worth-more-than-gold/
[21:50:18] <XXCoder> yeah it sure explains old formerly very expensive stuff like tea pot and cups
[21:50:20] <XXCoder> alum ones
[21:50:51] <zeeshan|2> http://galleryplus.ebayimg.com/ws/web/310374223620_1_0_1/1000x1000.jpg
[21:50:54] <zeeshan|2> hmm
[21:50:59] <zeeshan|2> anyone uese these connectors before
[21:51:05] <XXCoder> ironic eh. I throw enough into scrap today then annual alum extraction then
[21:51:49] <XXCoder> and mis-sized 5" alum rod thrown in scrap would cause someone who knows in that era to piss pants
[21:51:50] <Tom_itx> zeeshan|2 i've got one on my power supply
[21:51:58] <zeeshan|2> can you buy one of those
[21:52:00] <zeeshan|2> prewired?
[21:52:24] <zeeshan|2> i think im searching for the wrong term
[21:52:53] <Tom_itx> i got mine locally and use a pc cord on it
[21:53:01] <Tom_itx> the male end i got locally)
[21:54:47] <XXCoder> zeeshan|2: that looks like standard pc connector
[21:54:52] <XXCoder> power
[21:55:01] <XXCoder> might be bit different dunno
[21:55:11] <Tom_itx> i doubt it
[21:55:43] <zeeshan|2> hm
[21:56:19] <zeeshan|2> ssi: HI!
[21:56:49] <zeeshan|2> Tom_itx: so you basically wired
[21:56:52] <zeeshan|2> your own wires to that connector?
[21:57:39] <Tom_itx> no, i mounted the make receptacle to the control box
[21:57:54] <jdh> It's almost lathe season
[21:58:11] <XXCoder> good hunting
[21:58:14] <Tom_itx> when is it not lathe season?
[21:58:28] <zeeshan|2> jdh: whats the executive plan?
[21:58:56] <ssi> wat
[21:58:59] <jdh> http://www.hobby-machinist.com/attachment.php?attachmentid=84338&d=1411572347
[21:59:01] <zeeshan|2> ssi i wanted to confirm something
[21:59:04] <ssi> ok
[21:59:06] <zeeshan|2> cause i need to buy connectors
[21:59:06] <jdh> that... if you can see the pic
[21:59:22] <Rab> zeeshan|2, look for 'right angle iec cord'. IEC is the name of the standard, not of that particular connector, but it should work.
[21:59:31] <zeeshan|2> i'll have 3 signals going into the servo drive? 1 pin @ tach in, 1@ anallog + and 1@ analog-
[21:59:39] <zeeshan|2> (btw can 7i77 output differential analog??)
[21:59:44] <ssi> yes it ca
[21:59:50] <ssi> you also will have the enable signals
[21:59:54] <ssi> which is a differential pair
[21:59:54] <zeeshan|2> oh shit
[22:00:00] <zeeshan|2> so another 2 wires
[22:00:06] <zeeshan|2> ALL of them need to be shielded?
[22:00:19] <ssi> how long is your run?
[22:00:30] <zeeshan|2> im estimating 10 feet per axis?
[22:00:33] <Tom_itx> http://en.wikipedia.org/wiki/IEC_60320
[22:00:37] <Tom_itx> zeeshan|2
[22:00:39] <zeeshan|2> er
[22:00:40] <ssi> between the 7i77 and the drives?
[22:00:42] <zeeshan|2> 10 feet is the servo.
[22:00:50] <zeeshan|2> between 7i77 and drives is about 3 f eet
[22:00:58] <ssi> couldn't hurt
[22:01:14] <XXCoder> "Very common on personal computers and peripherals." yep
[22:01:15] <ssi> the tach line should be
[22:01:19] <ssi> the analog ref line should be
[22:01:19] <XXCoder> c13
[22:01:23] <ssi> enable probably doesn't matter
[22:01:26] <zeeshan|2> dude
[22:01:30] <zeeshan|2> how come theres in i2t pin?
[22:01:33] <zeeshan|2> in = no
[22:01:40] <zeeshan|2> how does it check for motor thermal
[22:02:30] <ssi> I dunno
[22:02:32] <ssi> I gotta sleep
[22:02:34] <ssi> be on tomorrow
[22:02:34] <zeeshan|2> oki
[22:02:36] <zeeshan|2> cu
[22:03:02] <zeeshan|2> rab when i search for that
[22:03:08] <zeeshan|2> i get the other kind of 90 degree connectors
[22:03:23] <XXCoder> what's wrong with 270 degree
[22:03:25] <Rab> Going left/right instead of up/down?
[22:03:29] <zeeshan|2> yes
[22:03:32] <zeeshan|2> exactly
[22:03:39] <zeeshan|2> XXCoder: it's not ideal for my wiring application
[22:03:48] <XXCoder> heh was kidding
[22:04:03] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15536209378/
[22:04:08] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15516339999/
[22:04:11] <zeeshan|2> not where power connector goes
[22:04:28] <zeeshan|2> if it goes 90 deg left right
[22:04:32] <zeeshan|2> it'll be really annoying to install
[22:04:36] <zeeshan|2> it'll hit the white base plate
[22:04:36] <Tom_itx> http://www.ebay.com/sch/i.html?_from=R40&_trksid=p2050601.m570.l1313.TR0.TRC0.H0.XC14+socket&_nkw=C14+socket&_sacat=0
[22:04:39] <Tom_itx> http://www.ebay.com/itm/IEC-320-C13-Down-angled-rewirable-plug-C13-plug-female-UL-approved-plug-/251547063474?pt=LH_DefaultDomain_0&hash=item3a915f94b2
[22:05:23] <zeeshan|2> hm
[22:05:25] <zeeshan|2> i like that second link
[22:05:30] <Rab> The rewirable plugs look great to me. If quarters are that tight, you want your cables custom length anyway.
[22:05:49] <zeeshan|2> yea
[22:05:52] <zeeshan|2> but the problem im thinking is
[22:05:55] <zeeshan|2> will my 12awg cable fit
[22:05:55] <Tom_itx> also:
http://www.ebay.com/itm/IEC-C13-right-angle-rewirable-connector-C13-plug-ULlist-/260786719331?pt=Laptop_Adapters_Chargers&hash=item3cb8198a63
[22:06:01] <Tom_itx> right angle
[22:06:08] <zeeshan|2> Tom_itx: that one ownt work
[22:06:13] <zeeshan|2> that aims the wire towards the white board
[22:06:18] <Tom_itx> mkay
[22:06:21] <zeeshan|2> i dont know what people call that white plate
[22:06:25] <zeeshan|2> back plate?
[22:06:34] <Rab> Do you really need 12AWG cable?
[22:06:38] <Jymmm> Do realize that MOST IEC connectors are not rated for more than 4Amps
[22:06:46] * skunkworks is wondering the same thing...
[22:06:46] <zeeshan|2> Rab: this is where the bloody confusion is
[22:06:52] <zeeshan|2> i contacted amc
[22:07:03] <zeeshan|2> their specs says they're using that iec60320 c14 standard
[22:07:13] <zeeshan|2> standard according to wiki says 10A rating.
[22:07:17] <zeeshan|2> the bus fuse is 16A on the drive
[22:07:21] <zeeshan|2> tell me how that works?
[22:07:42] <Jymmm> Heh, it took me to years to find a 15A IEC rated power cord.
[22:07:50] <Jymmm> two*
[22:07:57] <zeeshan|2> apparently this thing requires 2256W continuous
[22:08:14] <zeeshan|2> which works out to 18-19A at 120VAC
[22:08:18] <zeeshan|2> which again makes no sense.
[22:08:19] <Rab> Maybe the standard provides for 10A sustained, and the 16A fuse is rated for peak or inrush current.
[22:08:30] <zeeshan|2> hm
[22:08:32] <pcw_home> The bus fuse is just to avoid fireworks if the power semiconductors short
[22:08:55] <Rab> zeeshan|2, AMC is the VFD? Or the servo drive?
[22:08:59] <zeeshan|2> servo drive
[22:09:00] <zeeshan|2> http://www.a-m-c.com/download/datasheet/be25a20ac.pdf
[22:09:01] <zeeshan|2> page 3
[22:09:07] <zeeshan|2> look at "maximum continuous power"
[22:09:11] <Jymmm> The connector is rated 10A plus, but the cords are not (premolded)
[22:09:35] <zeeshan|2> Jymmm: ive seen 12awg and 14awg cables in that style
[22:09:38] <Jymmm> I've also seen where the ones witht he built in emi/rfi filter are way under rated.
[22:10:23] <zeeshan|2> that spec sheet also shows bus fuse size too
[22:10:23] <Jymmm> zeeshan|2: Sure, but actually LOOK at the rating on the cables AND connectors of the cord =)
[22:10:36] <Rab> I wonder how legit the chinese eBay connectors are for, say, 10A.
[22:10:41] <Jymmm> zeeshan|2: they dont all match =)
[22:10:46] <zeeshan|2> Jymmm: yea dude
[22:10:50] <zeeshan|2> connector is rated for 10A only.
[22:10:56] <zeeshan|2> im telling you
[22:10:57] <XXCoder> is chinese stuff rated for anything?
[22:10:57] <zeeshan|2> i called amc
[22:11:01] <zeeshan|2> i was on the phone for 25 min
[22:11:02] <skunkworks> 14awg sounds about right
[22:11:07] <zeeshan|2> no one can figure out why they've got a c14 connector on there
[22:11:11] <Rab> I won't buy any electrical fittings from Harbor Fright.
[22:11:12] <zeeshan|2> when the bus fuse is rated to 16A
[22:11:34] <pcw_home> The bus fuse is just to avoid fireworks if the power semiconductors short #2
[22:11:40] <Jymmm> zeeshan|2: Don't get your IEC panties get in a bunch now =)
[22:11:46] <zeeshan|2> pcw_home so what size cable do i run
[22:11:51] <zeeshan|2> what upstream protection do i need?
[22:12:04] <zeeshan|2> how can a c14 connector possibly take more current than 10A?
[22:12:08] <pcw_home> 18 ga should be fine
[22:12:16] <pcw_home> 10A is fine
[22:12:35] <skunkworks> do you think the plug burns up with anything over 10a?
[22:12:38] <zeeshan|2> pcw_home: if i put 10A cable, that means 120*10A = 1200W
[22:12:52] <zeeshan|2> which is much less than the 2256 W continuous output
[22:12:54] <zeeshan|2> on the spec sheet..
[22:13:11] <zeeshan|2> skunkworks: i highly doubt it
[22:13:11] <pcw_home> 2256 w means nothing the just multiplied the max DC voltage by the max current
[22:13:46] <pcw_home> I doubt if you will draw more that 1A average
[22:13:58] <zeeshan|2> 190V (max voltage) * 12.5A (max peak current) = 2375 W
[22:13:59] <zeeshan|2> roughly
[22:14:04] <Rab> I see 12.5A @ 30-125VAC, which isn't 2256W.
[22:14:09] <zeeshan|2> rab no
[22:14:15] <zeeshan|2> its 12.5A @ 195VDC
[22:14:24] <pcw_home> right so meaningless
[22:14:53] <pcw_home> a 10A cable is more than enough
[22:14:59] <zeeshan|2> pcw_home: my x motor is rated for 2.17kW
[22:15:16] <Rab> Maybe you should calculate how much your motor will actually draw in operation.
[22:15:16] <zeeshan|2> so wouldn't i be underdriving it by allowing it to only see 1200W?
[22:15:20] <pcw_home> continuous?
[22:15:22] <skunkworks> are you going to be running that continuous?
[22:15:26] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/14912262293/
[22:15:35] <Tom_itx> you plan on stalling it alot?
[22:15:41] <zeeshan|2> i'm not sure if thats a continuous rating or peak
[22:15:47] <zeeshan|2> im assuming continuous
[22:15:57] <zeeshan|2> its about 50lb
[22:16:08] <zeeshan|2> Tom_itx: i h ope not
[22:16:20] <zeeshan|2> but i definitely dont want to be stalling it because it's underpowered
[22:16:45] <pcw_home> So those drives are a bit small for that motor
[22:17:00] <zeeshan|2> amc gave me a part number for a cable they recommend
[22:17:07] <zeeshan|2> when i look up that cable on digikey, its a 14AWG cable
[22:17:17] <zeeshan|2> so i think they're overpowering the c14 connector
[22:17:19] <zeeshan|2> to 15A.
[22:17:43] <zeeshan|2> 15A*120 = 1800W
[22:17:48] <zeeshan|2> which is closer to the rating i need...
[22:18:01] <Rab> Maybe "2256W continuous" is very optimistic.
[22:18:02] <Tom_itx> look at the cord they put on 1500w heaters, hairdryers etc
[22:18:18] <zeeshan|2> Tom_itx: my 1500W heater has a tiny cord
[22:18:19] <zeeshan|2> lol
[22:18:24] <zeeshan|2> its so warm to touch when it's running
[22:19:01] <pcw_home> A drive that matched that motor would likely have a bigger cord
[22:19:05] <XXCoder> all heaters is basically just longass resistor
[22:19:19] <zeeshan|2> pcw_home, amc themself said this is the correct drive
[22:19:20] <zeeshan|2> for my application
[22:19:42] <pcw_home> its small for X
[22:19:51] <zeeshan|2> thats my Z motor
[22:20:05] <zeeshan|2> X and Y are both 1.18kW
[22:20:19] <zeeshan|2> theyre supposed to draw 7.5A at 190v..
[22:20:29] <pcw_home> So for Z a bigger drive would be better
[22:20:54] <zeeshan|2> anyone wanna trade? :-)
[22:21:12] <pcw_home> you usually want about 3 to 4x the cont current rating for peak current
[22:21:30] <zeeshan|2> so even for X and Y
[22:21:33] <zeeshan|2> it's too small..
[22:21:36] <zeeshan|2> is what you're saying :(
[22:21:45] <pcw_home> its very close to right for X and Y
[22:22:49] <zeeshan|2> okay im looking at the next model up
[22:22:52] <zeeshan|2> b40A40Ac
[22:22:58] <zeeshan|2> its got a real connector.. pin pads!
[22:23:19] <zeeshan|2> 7600 continuous output power
[22:23:34] <skunkworks> that is what we use in our k&t..\
[22:23:42] <pcw_home> those drives can supply between 3x and 4x continuous the X,Y (7.5A) current rating
[22:23:42] <skunkworks> and you can't have our extras...
[22:23:53] <zeeshan|2> skunkworks: trade!
[22:23:56] <pcw_home> so are fine for X,Y but a bit small for Z
[22:24:12] <zeeshan|2> so do you think i should just run the 14AWG
[22:24:19] <zeeshan|2> even though that means ill be pushing 15A through a connector rated for 10A
[22:24:30] <zeeshan|2> i mean thats exactly what theyre telling me to do :(
[22:24:36] <pcw_home> and you notice that the power cord rating is OK for ~1KW
[22:24:54] <zeeshan|2> which one the 14awg?
[22:24:58] <zeeshan|2> 1.8kW
[22:25:22] <zeeshan|2> Qualtek P/N: 312019-01
[22:25:24] <zeeshan|2> is the part number they gave me
[22:25:31] <zeeshan|2> NEMA 5-15P to IEC 60320-C13 (Example: Qualtek P/N: 312019-01)
[22:26:02] <pcw_home> Also unless you are pushing things really hard, I doubt you can get more than a few amps of line current/drive
[22:26:24] <zeeshan|2> i'd like to eat aluminum at 100ipm .25 doc
[22:26:25] <zeeshan|2> :P
[22:26:47] <zeeshan|2> something to note
[22:26:55] <zeeshan|2> X and Y axis are 3:1
[22:27:02] <zeeshan|2> and Z axis is i believe 5:1
[22:27:05] <zeeshan|2> might be 5.5:1
[22:27:17] <zeeshan|2> so its a crap load of torque
[22:28:49] <pcw_home> what rapids speed can those motors do?
[22:29:12] <zeeshan|2> the factory spec sheet said 250 ipm rapid for X and Y
[22:29:15] <zeeshan|2> and 200 for Z
[22:30:22] <zeeshan|2> i think ill just underdrive it a bit
[22:30:26] <zeeshan|2> and slow down the rapid
[22:30:46] <zeeshan|2> like if a motor spec says 13.6A
[22:31:06] <pcw_home> which means for X and Y when machining at 100 IPM about 7A is the most you can have as continuous primary current
[22:31:08] <zeeshan|2> wouldn't it be better to shoot for 12A anyway? to leave some room away from heating
[22:31:34] <zeeshan|2> *overheating the motor
[22:32:09] <pcw_home> having a lower current rating on the drive will limit acceleration, not speed
[22:32:21] <zeeshan|2> ahh
[22:32:39] <Connor> pcw_home: I'm running my mill on steppers.. I'm thinking of adding a encoder and switching to closed loop and running the steppers in velocity mode. Using the 7i76, I would add the 7i85
[22:32:41] <pcw_home> torque is directly proportional to current
[22:33:16] <Connor> Two questions: What's the diff between the 7i85 and 7i85S, and.. any documentation on HAL configuration for a setup like that ?
[22:34:02] <skunkworks> zeeshan|2: have you done the math to see what kind of cutting force you have with the torque you have available? I bet it is huge..
[22:34:02] <pcw_home> You can do that, there is not too much advantage except instant knowledge of stalls
[22:34:18] <zeeshan|2> skunkworks: roughly
[22:34:28] <zeeshan|2> i think i got like ~100 ipm @ .25DOC
[22:34:38] <zeeshan|2> with wnmg inserts
[22:34:43] <zeeshan|2> 2" face mill
[22:34:59] <pcw_home> They probably scaled the Z axis motor to get matching accel capabilities
[22:35:26] <zeeshan|2> pcw_home: so basically since i already have these motors
[22:35:30] <zeeshan|2> and drives..
[22:35:32] <zeeshan|2> i think ill try it out
[22:35:38] <zeeshan|2> if it causes issues, ill upgrade the Z drive
[22:35:42] <zeeshan|2> or just slow things down
[22:35:47] <zeeshan|2> no need to be macho man machining
[22:36:42] <skunkworks> iirc the K&T has a force of about 8tons on all axis.
[22:36:51] <zeeshan|2> hahaha
[22:36:53] <zeeshan|2> that's insane
[22:36:56] <skunkworks> don't make a mistake...
[22:37:13] <skunkworks> that is peak..
[22:37:23] <pcw_home> I suspect it will be beefy enough unless you are really pushing it
[22:37:25] <pcw_home> (and you can look for a b40A40Ac at your leisure)
[22:37:35] <zeeshan|2> i ebayed b40a40ac
[22:37:39] <zeeshan|2> non available, they're 999 new!
[22:38:40] <pcw_home> well a 2KW drive is 6 to 8 KW peak so pretty big
[22:38:52] <zeeshan|2> its double in width of my current drive
[22:38:57] <zeeshan|2> and 1" longer in length
[22:38:58] <zeeshan|2> about same height
[22:40:07] <zeeshan|2> http://www.digikey.ca/product-detail/en/312019-01/Q353-ND/1164224
[22:40:16] <zeeshan|2> its really interesting to note that cable they recommend
[22:40:31] <zeeshan|2> has a current rating of 15A yet still uses a c13 connector lol
[22:41:30] <skunkworks> http://electronicsam.com/images/KandT/conversion/moreelec.jpg
[22:41:50] <zeeshan|2> b40s?
[22:42:58] <zeeshan|2> btw guys its called a "Down angle" connector
[22:43:00] <zeeshan|2> not righht angle
[22:44:02] <skunkworks> be40
[22:44:19] <zeeshan|2> that cabinet is huge
[22:44:27] <zeeshan|2> is that for the k&t?
[22:44:50] <skunkworks> yes - messy now..
http://electronicsam.com/images/KandT/conversion/panel/electricalbox.jpg
[22:45:06] <zeeshan|2> thats a lot going on :)
[22:45:14] <zeeshan|2> what are those big ceramic resistors for?
[22:45:20] <zeeshan|2> dc brake?
[22:45:29] <skunkworks> spindle braking
[22:46:22] <zeeshan|2> is that a be25a20ac on the bottom
[22:46:24] <zeeshan|2> sitting by itself
[22:46:47] <skunkworks> something close to that.. does the table rotation
[22:47:01] <zeeshan|2> okay cause damn that gives a size perspective
[22:47:54] <zeeshan|2> im looking at your power distribution
[22:48:01] <zeeshan|2> (that is what im currently working on)
[22:48:13] <zeeshan|2> it looks like youre going from 3AWG main
[22:48:18] <zeeshan|2> to a distribution block
[22:48:37] <zeeshan|2> and you have smaller size wires going to each contactor (not fused?)
[22:51:52] <Rab> zeeshan|2, haha, might want to differentiate between up-angle (UA) and down-angle (DA).
[22:52:01] <zeeshan|2> Rab: yessir :P
[22:53:06] <Rab> I actually found a name-brand mfg of UA/DA cables, APC. Their models are 18/3 and rated for 10A/125V.
[22:53:26] <zeeshan|2> any in 14awg? :{
[22:53:41] <zeeshan|2> even if i can find a down angle connector
[22:53:49] <zeeshan|2> and provide it my own cable
[22:53:53] <Rab> Strange, from their catalog it seems like they rate the connector itself for 10A (inline plug) and 15A (inline socket).
[22:53:53] <zeeshan|2> i'll be happy with that..
[22:53:58] <skunkworks> there is a drop down transformer that drops the voltage down to the drives from 220 irrc
[22:54:00] <zeeshan|2> as long as it's made by someone reputable
[22:54:20] <zeeshan|2> skunkworks: i understand
[22:54:23] <zeeshan|2> im talking about the contactors
[22:54:35] <zeeshan|2> it seems like your main disconnect switch has 3 awg wires going to it
[22:54:47] <zeeshan|2> and then a while bunchof small wires coming out of them, with no breakers of fuse protection in between
[22:54:59] <skunkworks> it is big because it used to run a 40hp hydraulic motor...
[22:55:02] <Rab> They have RA cables that are 14/3 rated 15A/250V.
[22:55:08] <zeeshan|2> skunkworks: oh
[22:55:17] <zeeshan|2> Rab: exactly!
[22:55:25] <zeeshan|2> i think that iec 60320-c13 standard is prolly b/s
[22:55:35] <zeeshan|2> all these guys seem to overdrive it to 15A
[22:55:39] <zeeshan|2> since it "works"
[22:55:45] <skunkworks> it is now breakered a lot less - and the wiring in box is smaller.
[22:56:06] <zeeshan|2> skunkworks: i currently was thinking of having a breaker panel outside of my control cabinet
[22:56:17] <zeeshan|2> the enclosure stuff looks so bulk..
[22:56:23] <zeeshan|2> *bulky, i dont like how it looks
[22:56:51] <skunkworks> as you can see by our cabinet.. we don't care how it looks.. :)
[22:57:03] <zeeshan|2> my original plan was 3awg cable to a main disconnect switch and then from disconnect switch, smaller wires to each branch circuit (through a fuse)
[22:57:19] <zeeshan|2> but i got yelled at in here because i was told the wires between the disconnect and fuse holder would be "unfused"
[22:57:21] <zeeshan|2> and potential hazard
[22:57:27] <zeeshan|2> which is true
[22:58:01] <zeeshan|2> theres gotta be a clean way to add fuse protection without making is a hazard
[22:58:05] <zeeshan|2> and not using a big ass bus bar
[22:58:51] <skunkworks> automotive in-line fuses..
[22:58:54] <skunkworks> ;)
[22:59:01] <Rab> http://www.quail.com/C-1196/Part-Matrix-Choose-Equipment-End-.aspx?lc=true&1196=SQBFAEMALQA2ADAAMwAyADAALQBDADEAMwAgAEQATwBXAE4AIABBAE4ARwBMAEUA
[22:59:08] <zeeshan|2> skunkworks: lol
[22:59:38] <zeeshan|2> nice rab
[22:59:39] <zeeshan|2> thats it
[22:59:42] <Rab> Bingo:
http://www.quail.com/P-4931.072/Power-Cord--Quail-Pn-4931072--6-143-Sjtw-105c-Black-Nacc-Nema-515p-To-Iec60320c13-Down-Angle.aspx
[22:59:53] <zeeshan|2> nice
[22:59:57] <zeeshan|2> that even has a 105C conductor
[23:00:02] <zeeshan|2> not the garbage 60C
[23:00:16] <Rab> Now you have to source it. ;)
[23:01:09] <zeeshan|2> Velco Distribution Group, LTD 40 Larkin Ave. Markham, ON L3P 4R3 Canada
[23:01:10] <zeeshan|2> yay
[23:01:15] <zeeshan|2> distributor 1 hr away
[23:01:37] <Rab> They have a hospital version further down on that page. And maybe more I missed.
[23:02:18] <zeeshan|2> the one you posted works
[23:02:23] <zeeshan|2> i think i mighjt need to have it longer
[23:02:27] <Rab> You should call AMC and give them the Quail part number to update their records.
[23:02:40] <zeeshan|2> well the part number they give
[23:02:42] <zeeshan|2> works..
[23:02:49] <zeeshan|2> its just not down angle
[23:02:59] <Rab> You're in luck, 4931.180 is 15'.
[23:03:08] <zeeshan|2> sweet!
[23:03:41] <zeeshan|2> rab youre the electronics guru
[23:03:43] <zeeshan|2> help me :{
[23:03:53] <zeeshan|2> btw did you fix your backlash issue?
[23:03:57] <Rab> Although if you're agonizing over this stuff as much as you seem to be, I think you want to keep the cables as short as possible. Probably even cutting the male side off and wiring them to a terminal bus.
[23:04:06] <Rab> By ignoring it!
[23:04:09] <zeeshan|2> LOL
[23:04:25] <zeeshan|2> use cam software and use it to fix backlash
[23:04:33] <Rab> I've been too busy/sick to do more than run off some quick engraving projects, and they look OK.
[23:05:07] <zeeshan|2> Rab: i agree i'd like to keep the cables as short as possible
[23:05:19] <zeeshan|2> by terminal bus
[23:05:25] <zeeshan|2> you mean something that gets L1 and L2
[23:05:30] <zeeshan|2> energizes the entire bus
[23:05:31] <Rab> zeeshan|2, maybe there's an option for direct-wiring of the servo drives.
[23:05:33] <zeeshan|2> and i connect to it?
[23:05:38] <Rab> Yeah!
[23:05:43] <zeeshan|2> the problem is
[23:05:56] <zeeshan|2> the wires that go from the bus to the fuse would not be protected
[23:06:14] <Rab> I think you'd want breakers rather than fuses.
[23:06:30] <zeeshan|2> why
[23:06:44] <Rab> So you don't burn up a bunch of fuses.
[23:06:50] <zeeshan|2> :P
[23:06:53] <zeeshan|2> okay even with breakers
[23:07:05] <zeeshan|2> the wire that goes from terminal bus to breaker is unprotected
[23:07:08] <Rab> Fuses degrade with use.
[23:07:22] <zeeshan|2> that is true
[23:07:36] <Rab> Isn't it protected by the breaker?
[23:07:59] <Rab> Or, you mean a breaker inline with each driver??
[23:08:11] <zeeshan|2> 3awg -----> bus ------> 14awg wire ----> breaker (15A) ----> servo drive
[23:08:17] <Rab> What's at the other end of all these exotic IEC power cords? $15 power strip?
[23:08:20] <zeeshan|2> the wire that goes from bus to 14awg , if it shorts on the case
[23:08:24] <zeeshan|2> will catch on fire
[23:08:30] <zeeshan|2> since the upstream breaker for the 3awg would be 100A
[23:08:56] <Rab> There's no protection in the servo drivers?
[23:09:04] <zeeshan|2> there is
[23:09:10] <Rab> You don't want to count on it?
[23:09:15] <zeeshan|2> but that does protect the wire between bus and 14awg from burning
[23:09:18] <zeeshan|2> *doesnt
[23:09:31] <zeeshan|2> say the it shorts on the case for some ungodly reason
[23:09:39] <zeeshan|2> theres no protection for it
[23:09:47] <Rab> Sounds like you want a breaker box with 15A breakers.
[23:10:03] <zeeshan|2> yes which is what i have, but it looks like an ugly wart attached to my control box =(
[23:10:11] <zeeshan|2> i was wondering if theres some sort of terminal bus solution
[23:10:14] <Rab> 3awg --> breaker box --> servo drive
[23:10:29] <zeeshan|2> where the breakers mount directly to to the terminal bus
[23:10:51] <zeeshan|2> at eaton
[23:10:55] <zeeshan|2> we used to do it like this:
[23:10:58] <Rab> Reality bomb: everything you have shown so far looks like a collection of ugly warts.
[23:11:16] <zeeshan|2> Rab: hahahah
[23:11:16] <zeeshan|2> m,ean
[23:11:20] <Rab> Nothing justifies ugly warts like workplace safety.
[23:11:53] <zeeshan|2> darn it i cant find the pics :/
[23:12:26] <zeeshan|2> http://drawout-mccb.eaton.com/images/page1a.jpg
[23:12:35] <zeeshan|2> something like this would be beside the vfds
[23:12:50] <zeeshan|2> but that one is rated for 1000A! :P
[23:13:26] <Rab> bedtime
[23:14:20] <zeeshan|2> gnite!
{kind=link}
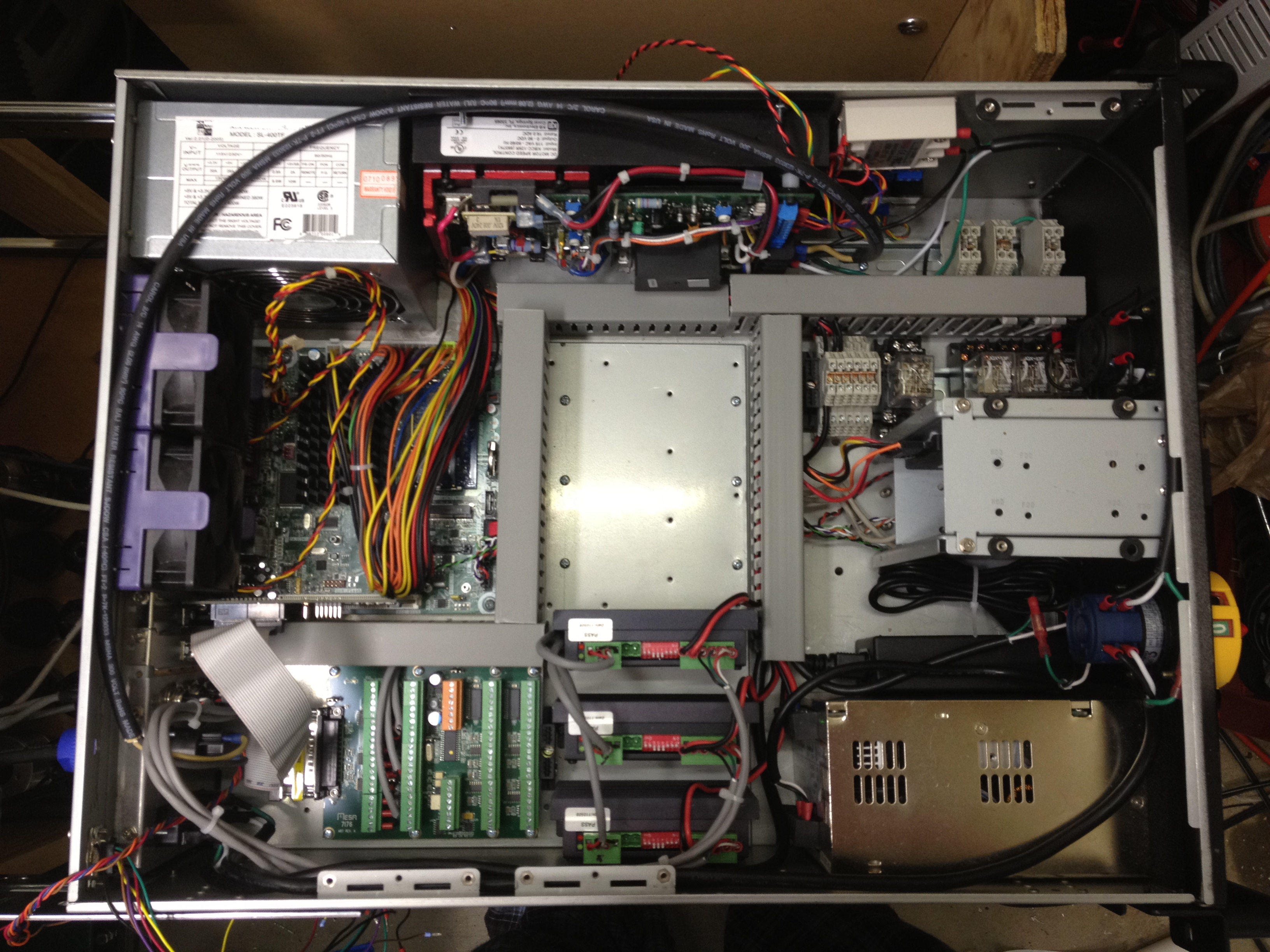{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}