Back
[00:40:53] <zeeshan|2> now that i kind of understand servo motors
[00:41:28] <zeeshan|2> yes they're more precise
[00:41:43] <zeeshan|2> but if you're okay with 200steps/rev and you size your leadscrew pitch accordingly
[00:41:49] <zeeshan|2> then steppers may be good enough
[00:41:59] <zeeshan|2> i always was under the impresion servos were position closed loop
[00:42:16] <zeeshan|2> but it seems like most servos are velocity or torque or current controlled
[00:42:24] <zeeshan|2> and the position loop is seperate
[00:42:30] <zeeshan|2> am i wrong?!
[00:42:37] <zeeshan|2> you could use this position loop with a stepper
[00:42:43] <zeeshan|2> through linuxcnc
[00:43:03] <zeeshan|2> using glass scales or encoders attached to the stepper
[00:43:10] <zeeshan|2> or attached to the screw
[08:04:26] <skunkworks_> supereye shows up on wheezy..
http://electronicsam.com/images/KandT/testing/Screenshot%20-%2010162014%20-%2003:38:21%20PM.png
[08:08:58] * archivist greases the internet to get pictures faster
[08:10:45] <Jymmm> It was raher instant for me.
[08:13:20] <flughafen> what the hell are you playing skunkworks_
[08:13:54] <flughafen> skunkworks_: is that kde3?
[08:14:04] <flughafen> ah
[08:14:07] <flughafen> no
[08:14:09] <flughafen> sorr
[09:24:05] <skunkworks_> cradek, shows up a as a video device
http://www.ebay.com/itm/Supereyes-B005-200X-Handheld-Digital-Microscope-Otoscope-Magnifier-w-LED-tripod-/231286789433?ssPageName=ADME:L:OU:US:1120
[09:24:17] <skunkworks_> on wheezy.
http://electronicsam.com/images/KandT/testing/Screenshot%20-%2010162014%20-%2003:38:21%20PM.png
[09:52:04] <cradek> skunkworks_: that's pretty great, then. I'll get one to play with.
[09:52:56] <cradek> skunkworks_: are you going to texas?
[09:53:29] <skunkworks_> No.. Too much stuff going on..
[09:56:35] <skunkworks_> I will be there in spirit..
[10:18:57] * JT-Shop was able to use the Arc Gen to calculate a new arc for an existing G code again... I'm loving it
[10:19:46] <ssi> JT-Shop: something you wrote?
[10:22:22] <zeeshan|2> hi ssi
[10:22:37] <ssi> hi
[10:22:43] * zeeshan|2 read the manuals for amc be series
[10:22:50] <ssi> figure it out? :)
[10:22:54] <zeeshan|2> yea
[10:22:58] <zeeshan|2> but it does make me realize
[10:23:02] <zeeshan|2> i'll probably need a scope
[10:23:07] <zeeshan|2> and a function generator to tune them properly
[10:23:08] <ssi> nah
[10:23:19] <ssi> halscope is enough
[10:23:23] <zeeshan|2> haha
[10:23:27] <ssi> serious
[10:23:27] <zeeshan|2> how do you generate the function?
[10:23:29] <zeeshan|2> through hal scope?
[10:23:30] <zeeshan|2> er
[10:23:31] <zeeshan|2> hal?
[10:23:46] <ssi> I have three or four scopes, and I didn't use them to tune my X axis yesterday
[10:23:46] <zeeshan|2> i guess that makes sense
[10:23:55] <zeeshan|2> you scope hoarder!
[10:24:14] <zeeshan|2> did you have to do through hole tuning
[10:24:18] <zeeshan|2> or whatever they call it
[10:24:21] <zeeshan|2> to "fine tune"
[10:24:32] <ssi> here's what I did
[10:24:34] <zeeshan|2> or were teh settings through the dip switches good enuf
[10:24:45] <ssi> no, I didn't have to change any components
[10:24:48] <ssi> just the switches and pots
[10:25:04] <ssi> so I'm running in velocity mode, with encoder feedback for velocity
[10:25:24] <ssi> you'll want to run either velocity mode with your tach input for velocity, or ditch the tachs and go torque mode
[10:25:44] <JT-Shop> ssi, yes
[10:26:00] <ssi> I turned up the loop gain until the motor started to oscillate, then backed it off til it quieted down
[10:26:18] <zeeshan|2> ssi
[10:26:21] <zeeshan|2> i think i can use the tachs.
[10:26:22] <ssi> then I watched the velocity command in hal, and I trimmed the reference gain and offset until it was stable at 0
[10:26:38] <zeeshan|2> the tach specs are 20mV/min. if the servo is spinning at max speed (3000rev/min)
[10:26:42] <zeeshan|2> that works out to 60V
[10:26:44] <ssi> then I used JT's tuning method
[10:26:46] <JT-Shop> ssi,
http://gnipsel.com/linuxcnc/gedit/index.html
[10:26:54] <zeeshan|2> which is exactly the same maximum spec
[10:27:23] <ssi> long cruises at constant velocity, turn up P until it oscillates, then back it off, then trim FF1 to null the ferror offset at constant velocity, then trim FF2 to null the offset during accel
[10:27:28] <ssi> pretty straightforward
[10:27:30] <zeeshan|2> i dont know jt's tuning method, but i use zieger nicholas
[10:27:34] <zeeshan|2> in my school lab before to tune
[10:27:42] <ssi> http://gnipsel.com/linuxcnc/tuning/servo.html
[10:27:55] <zeeshan|2> i dont see how say i need to set Kp to 30
[10:27:59] <zeeshan|2> how i'm supposed to know what that is on the dip switch :P
[10:28:12] <ssi> JT-Shop: now that's handy
[10:28:43] <zeeshan|2> ssi did you have drift?
[10:28:45] <ssi> zeeshan|2: this may be another of those magical cases where what they taught you in school doesn't align with the real world
[10:28:51] <zeeshan|2> ssi
[10:28:54] <zeeshan|2> but the thing is
[10:28:57] <zeeshan|2> i dont remember the controller we were using
[10:29:04] <zeeshan|2> we were tuning through the computer
[10:29:08] <zeeshan|2> it was communicating through an interface
[10:29:20] <zeeshan|2> and zieger nichols is a highly used method in industry
[10:29:46] <zeeshan|2> cause you do exactly what you were saying
[10:29:51] <zeeshan|2> you tune to oscillation
[10:29:59] <zeeshan|2> and then measure the peak to peak voltage
[10:30:08] <zeeshan|2> and i think the period(i forget exactly what)
[10:30:29] <zeeshan|2> and using 3 formulas, you get kp ki kd
[10:30:40] <ssi> zeeshan|2: we have feedforward, and it's easier to tune these loops with feedforward than ID terms
[10:31:23] <zeeshan|2> With feed-forward control, the disturbances are measured and accounted for before they have time to affect the system.
[10:31:24] <zeeshan|2> oh
[10:31:34] <ssi> but by all means
[10:31:38] <zeeshan|2> so it anticipates?
[10:31:40] <ssi> use your book larnin' to do it your way
[10:31:47] <zeeshan|2> ssi fak you
[10:31:57] <zeeshan|2> i'm always trying to make the link
[10:32:04] <zeeshan|2> between what i know and dont know
[10:32:07] <zeeshan|2> you know this :)
[10:32:18] <zeeshan|2> !!
[10:33:08] <ssi> you remind me of a friend of mine
[10:33:15] <ssi> who always comes to me and asks for my opinion
[10:33:21] <zeeshan|2> http://gnipsel.com/linuxcnc/tuning/images/hal-scope-01.png
[10:33:25] <zeeshan|2> haha this picture is so cool
[10:33:28] <ssi> and when I give him my opinion, he completely disagrees with me and says "but that's not what xyz" says
[10:33:32] <zeeshan|2> you actually see it settling
[10:33:46] <zeeshan|2> it looks like a typical second order system
[10:33:58] <ssi> it is
[10:34:05] <ssi> that's second order underdamped ringing
[10:34:11] <zeeshan|2> i wasn't disagreeing with what you were saying
[10:34:16] <ssi> and you can use FF2 to compensate for it
[10:34:23] <ssi> or you can spend eternity trying to get your I and D terms right
[10:34:28] <ssi> it's much much easier to use FF
[10:34:59] <zeeshan|2> fast fourier transform will give me what
[10:35:05] <zeeshan|2> the frequency of oscillation?
[10:35:09] <ssi> feedforward, dummy
[10:35:13] <zeeshan|2> o
[10:35:32] <ssi> context clues!
[10:35:36] <zeeshan|2> hah
[10:35:50] <zeeshan|2> okay well according to the manuals
[10:35:55] <zeeshan|2> i dont see why the hell not to run these drives
[10:35:58] <zeeshan|2> and according to you too
[10:35:59] <ssi> !log
[10:35:59] <zeeshan|2> :)
[10:36:04] <ssi> doh how does that work
[10:36:07] <zeeshan|2> theyre smaller
[10:36:12] <zeeshan|2> they have a built in supply
[10:36:14] <zeeshan|2> they're cheap
[10:36:17] <ssi> exactly
[10:36:23] <zeeshan|2> they're high workable with different types of servos
[10:36:31] <zeeshan|2> not just brush
[10:36:57] <zeeshan|2> i went to my basement to check what i have
[10:37:00] <zeeshan|2> i actually have a 36x36 box.
[10:37:03] <zeeshan|2> nema4
[10:37:10] <zeeshan|2> so if i can use that, that would be awesome
[10:37:41] <zeeshan|2> dude check this out
[10:37:42] <zeeshan|2> http://i.imgur.com/OOBcfTB.jpg
[10:37:58] <zeeshan|2> so instead of having that big ass toriodal supply
[10:38:01] <zeeshan|2> i wont have it anymore
[10:38:21] <ssi> is this your lathe?
[10:38:24] <zeeshan|2> yea
[10:38:30] <zeeshan|2> instead ill have one 24VDC supply
[10:38:34] <zeeshan|2> and 1x5VDC supply
[10:38:45] <zeeshan|2> but ill have 2 VFDs now
[10:39:02] <zeeshan|2> 1 vfd driving the spindle and one driving the hydraulic pump
[10:39:14] <zeeshan|2> hopefully i can fit it all in the box
[10:39:19] <ssi> I'm gonna have three VFDs in my mill :P
[10:39:24] <zeeshan|2> haha for what?
[10:39:26] <zeeshan|2> 1 for spindle
[10:39:28] <zeeshan|2> others for?
[10:39:31] <ssi> huge one for spindle
[10:39:34] <ssi> one for the spindle FAN
[10:39:37] <ssi> one for the coolant pump
[10:39:38] <zeeshan|2> hahaha
[10:39:45] <zeeshan|2> why didnt you just swap the coolant pump out?
[10:39:51] <ssi> not that easy
[10:40:02] <ssi> I actually rebuilt the coolant pump
[10:40:06] <ssi> it had frozen bearings
[10:40:08] <zeeshan|2> ah
[10:40:20] <ssi> I took it all apart and sandblasted the pump housing and powder coated it
[10:40:32] <ssi> https://pbs.twimg.com/media/Bz1pKrmIcAAcjaX.jpg:large
[10:40:34] <zeeshan|2> mines a little bit weird
[10:40:36] <zeeshan|2> it looks like a blender
[10:40:46] <zeeshan|2> that looks nice
[10:40:51] <ssi> it came out pretty good
[10:40:59] <ssi> it wasn't as clean as I'd have liked it to be
[10:41:08] <zeeshan|2> its a pump!
[10:41:09] <zeeshan|2> :p
[10:41:17] <ssi> I bought a new big blast cabinet for the airport after doing this
[10:41:21] <zeeshan|2> damn you
[10:41:23] <ssi> cause my tiny ones at home were too small and crappy to do this
[10:41:25] <zeeshan|2> you have a stool im looking for
[10:41:30] <zeeshan|2> i cant find a wood stool locally anywhere
[10:41:31] <ssi> also I bought another air dryer for the airport
[10:41:36] <ssi> walmart sells those stools
[10:41:45] <zeeshan|2> are they high up?
[10:41:52] <ssi> they're bench height
[10:41:52] <zeeshan|2> my welding table is 4.5 feet from the floor
[10:41:54] <ssi> they have table height ones too
[10:41:57] <zeeshan|2> so need something high
[10:42:01] <ssi> er, no not 4.5'
[10:42:06] <ssi> that's insanity high
[10:42:09] <ssi> most benches are like 36-38"
[10:42:23] <zeeshan|2> i like my bench higher
[10:42:24] <zeeshan|2> for welding
[10:42:27] <zeeshan|2> its just a preference
[10:42:41] <ssi> so here loo
[10:42:42] <ssi> https://pbs.twimg.com/media/B0BU6dEIcAAwMQS.png:large
[10:42:56] <ssi> that's the best I could get it yesterday, but it was just a bare motor
[10:43:04] <ssi> I think once it's got a load I can dial it in further
[10:43:20] <zeeshan|2> whats the absolute maximum value
[10:43:21] <zeeshan|2> betwen those spikes
[10:43:32] <ssi> less than .005"
[10:43:38] <ssi> which is still way more than I'd like
[10:43:41] <zeeshan|2> yea
[10:43:42] <zeeshan|2> thats nfg
[10:44:02] <ssi> but that's also during a 480ipm rapid
[10:44:10] <zeeshan|2> those P I D values
[10:44:17] <zeeshan|2> are those for positional feedback
[10:44:25] <ssi> yeah that's the position loop pid
[10:44:27] <zeeshan|2> okay
[10:44:52] <zeeshan|2> tuning the velocity is one thing
[10:45:10] <zeeshan|2> and i guess the position is a completely other beast
[10:45:18] <ssi> the velocity tuning is easy with these drives... just null the drift and turn up loop gain til it oscillates
[10:45:18] <zeeshan|2> which i remember when reading the linuxcnc manual
[10:45:21] <ssi> nothing else to it
[10:45:25] <zeeshan|2> they talked about 2 experimental ways to tune
[10:45:33] <zeeshan|2> ah okay
[10:46:29] <MrSunshine> in linuxcnc, could i if i want feed back a step/dir signal on inputs of the parport and update the axis position by that? (trying to use a thc that disconnects the pcs control over the stepper driver and updates position independantly) =)
[10:47:11] <zeeshan|2> MrSunshine: thats what i was trying to say last night
[10:47:16] <cradek> yes, but you'll have to be careful with your ferror setting
[10:47:18] <zeeshan|2> i understand servos are faster
[10:47:32] <zeeshan|2> and can be more precise
[10:47:41] <cradek> if command and feedback positions diverge more than the ferror limit, it'll abort and disable
[10:47:41] <zeeshan|2> but you should still be able to implement a position feedback loop
[10:47:46] <zeeshan|2> w/ them
[10:48:39] <zeeshan|2> cradek so if you're commanding 5.000 and your scales are coming back with 5.004
[10:48:58] <zeeshan|2> it'll try to move step and dir in the correcf way
[10:49:00] <zeeshan|2> to get back to 5.000?
[10:49:52] <cradek> if you are using feedback to pid, yes -- if you are using feedback just to the gui, no - command is already and always 5.000 in that case
[10:50:06] <zeeshan|2> yes
[10:50:12] <cradek> scales and step/dir is a weird combination
[10:50:14] <zeeshan|2> scales being glass scales
[10:50:38] <cradek> but it's certainly true you can use stepgen in velocity mode with pid
[10:51:13] <zeeshan|2> awesome
[10:51:42] <zeeshan|2> on tuesday i went to a seminar to see what the machining reseachers are doing
[10:52:08] <zeeshan|2> when you're machining stuff at a set parameters, and you get chatter
[10:52:19] <zeeshan|2> you usually adjust stiffness
[10:52:28] <zeeshan|2> but she's like how can we add dampening?
[10:52:40] <zeeshan|2> she's using eddy currents around the work piece
[10:52:49] <zeeshan|2> to add damping
[10:54:03] <zeeshan|2> she showed a 4" face mill taking 0.200" doc in stainless 4" thick plate that had severe chatter at some cutting parameters
[10:54:17] <zeeshan|2> then she showed the same plate with eddy current dampening turned on
[10:54:26] <zeeshan|2> the surface finish improved like 2109219328x
[10:54:31] <zeeshan|2> interesting concept
[10:54:48] <ssi> just using a magnetic field to keep the part from vibrating?
[10:55:37] <zeeshan|2> yea
[10:55:45] <zeeshan|2> constant magnetic field
[10:55:52] <zeeshan|2> i wish i had a picture of before and after
[10:55:54] <zeeshan|2> its a big difference
[10:55:55] <_methods> hehe how much is that option
[10:56:09] <zeeshan|2> methods i dont think it's a great option for general machining
[10:56:11] <zeeshan|2> but for production
[10:56:19] <zeeshan|2> where its a constant part being machined all the time
[10:56:22] <zeeshan|2> its beneficial
[10:56:24] <_methods> i'll take the eddy current package
[10:57:08] <_methods> definitely an interesting concept
[10:57:32] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/14929606143/
[10:57:36] <zeeshan|2> i was going through my motor collection
[10:57:38] <zeeshan|2> found this dc motor
[10:58:44] <zeeshan|2> looks like its a 90VDC motor
[10:58:48] <zeeshan|2> not sure what kind. prolly brush
[11:01:04] <ssi> does it have brush caps visible?
[11:01:59] <zeeshan|2> i havent taken it apart
[11:02:04] <pcw_home> If its rated 90VDC it pretty much has to be a brush motor
[11:02:10] <zeeshan|2> http://www.leeson.com/Products/products/DCMotors/scrrated.html
[11:02:10] <ssi> yeah it's a brush motor
[11:02:14] <ssi> http://www.leeson.com/Literature/pdf/b1600IEC.pdf
[11:02:17] <zeeshan|2> im pretty sure its that brand
[11:02:46] <zeeshan|2> 1/4 hp seems pretty weak sauce though
[11:03:21] <pcw_home> enough for a rotary axis
[11:03:31] <zeeshan|2> thats a good point
[11:03:37] <ssi> I guess I need to start considering building a rotary axis for the vmc
[11:03:45] <zeeshan|2> ssi first get it running
[11:03:45] <zeeshan|2> !
[11:03:49] <ssi> :D
[11:03:57] <zeeshan|2> my goal is get this thing running
[11:03:58] <zeeshan|2> then rotary axis
[11:04:02] <zeeshan|2> but im leaving room for expansion this time
[11:04:17] <ssi> I'd like to build a 5 axis trunnion
[11:04:22] <ssi> I think that'd be fun
[11:04:29] <pcw_home> Geared right a 1/4 horse motor will beat pretty much any stepmotor
[11:05:15] <ssi> http://www.ebay.com/itm/CNC-Engraving-Machine-H-Rotary-Table-Jaw-Chuck-Rotational-A-B-Axis-4th-5th-Axis-/251411868892?pt=BI_Tool_Work_Holding&hash=item3a8950acdc
[11:05:18] <ssi> that's cute
[11:05:25] <zeeshan|2> wow thats cheap
[11:05:36] <ssi> yeah there's a bunch of cheap little 4th and 4th/5th axis deals from china on ebay
[11:05:52] <pcw_home> well its cheap because its cheap
[11:05:53] <zeeshan|2> haha its tiny
[11:05:55] <ssi> yep
[11:06:16] <zeeshan|2> it doesnt look too hard to build though
[11:06:19] <zeeshan|2> which is a good thing!
[11:06:20] <ssi> no, not really
[11:06:26] <ssi> I wish I had means to cast iron
[11:06:37] <SpeedEvil> I was thinking I'd found a great deal on a crucible from china.
[11:06:53] <SpeedEvil> Then I realised that the 6mm diameter 4mm height wasn't in fact a typo
[11:06:59] <ssi> WHAT
[11:07:00] <ssi> hah
[11:07:15] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15363652508/in/photostream/
[11:07:19] <zeeshan|2> heres another motor
[11:07:26] <zeeshan|2> that i cant tell what the heck it is
[11:07:35] <zeeshan|2> but it seems to have a brake in it
[11:07:41] * SpeedEvil has been mailing vendors in china in search of a reasonable priced supplier for 5kg of Li
[11:07:53] <ssi> zeeshan|2: looks like 3ph
[11:08:04] <SpeedEvil> At least casting that is easy! :)
[11:08:14] <ssi> Li?
[11:08:19] <SpeedEvil> ssi: casting iron doesn't actually seem that hard.
[11:08:21] <SpeedEvil> ssi: lithium
[11:08:21] <zeeshan|2> lithium?
[11:08:34] <ssi> going to use it recreationally?!
[11:08:37] <zeeshan|2> haha
[11:08:43] <ssi> SpeedEvil: I figured I'd start with casting aluminum
[11:08:47] <SpeedEvil> ssi: Does having cheap electricity count?
[11:08:53] <ssi> it's just a pretty big involved thing that I haven't had a chance to get into yet
[11:09:14] <ssi> but I'm gonna try to save and segregate all the swarf that comes out of the vmc :P
[11:09:33] <SpeedEvil> ssi: I'm trying to make a Lithium/lead/antimony battery
[11:09:39] <ssi> I see
[11:09:57] <zeeshan|2> ha
[11:09:59] <zeeshan|2> its a 3 phase motor
[11:10:02] <zeeshan|2> but it has a brake on it too
[11:10:02] <zeeshan|2> weird.
[11:10:10] <zeeshan|2> http://translate.google.ca/translate?hl=en&sl=it&u=http://www.coelmotori.it/&prev=/search%3Fq%3Dcoel%2Bmotori%26client%3Dfirefox-a%26rls%3Dorg.mozilla:en-US:official%26channel%3Dsb%26biw%3D1680%26bih%3D979
[11:10:39] <zeeshan|2> i should be using this motor
[11:10:41] <zeeshan|2> on my bead roller
[11:10:49] <zeeshan|2> where everytime im not pressing the pedal
[11:10:51] <zeeshan|2> it brakes instantly
[11:11:07] <SpeedEvil> What is a bead roller?
[11:11:09] <zeeshan|2> but its only 3/4hp
[11:11:11] <SpeedEvil> (I should google)
[11:12:05] <zeeshan|2> http://www.youtube.com/watch?v=N35CJzc9l_Y
[11:12:33] <zeeshan|2> thats a stainless sheet
[11:12:51] <zeeshan|2> actually nm
[11:12:52] <zeeshan|2> its aluminum
[11:13:29] <ssi> so I'm thinking I should head down to the airport, install the VFD, reinstall the X motor, wire up at least one of these drives, and try running the spindle and tuning the X axis
[11:13:42] <zeeshan|2> you got the vfd
[11:13:43] <zeeshan|2> already?
[11:13:46] <ssi> yeah, yesterday
[11:13:49] <zeeshan|2> damn americans and your fast shipping
[11:13:52] <ssi> or day before yesterday actually
[11:14:08] <ssi> my commutation boards are still enroute
[11:14:11] <ssi> they shipped them monday
[11:14:15] <ssi> damn china and their slow customs
[11:14:18] <zeeshan|2> :]
[11:14:23] <ssi> I'll have parts today
[11:14:26] <ssi> hopefully boards tomorrow
[11:14:34] <ssi> I already want to redesign these boards :(
[11:14:40] <ssi> I designed them to work with the parker drives
[11:14:52] <ssi> and literally the SAME DAY I submitted the pcb order, I found out the parker drives were BS
[11:15:01] <zeeshan|2> haha
[11:15:10] <ssi> fortunately I left myself an out
[11:15:33] <ssi> but I wish I'd gone all the way and passed the encoder signals through the cpld... instead I cheated and just wired them through with traces
[11:15:50] <ssi> if I want to use these motors with those BE drives, I have to hack the hall states a bit more
[11:16:20] <ssi> I can probably bluewire something to make it work
[11:17:17] <ssi> I wonder if the 9500XL cpld has differential IOBs
[11:17:28] <zeeshan|2> youre speaking alien
[11:17:29] <zeeshan|2> :D
[11:17:41] <ssi> AM I?!
[11:18:01] <pcw_home> I would not use CPLD outputs for real world connections
[11:18:47] <pcw_home> (CX95XX CPLDs are fine but the I/O are fragile in my experience)
[11:19:24] <pcw_home> XC95...
[11:20:06] <ssi> pcw_home: what I'd need to do is just tap one or two of the encoder lines to use it as an input
[11:20:16] <ssi> but they're differential encoders of course
[11:20:52] <pcw_home> At the minimum put a series resistor
[11:20:56] <ssi> I had planned on repeating the encoder signals through the cpld, but now I'm curious about this fragility :)
[11:21:11] <zeeshan|2> man
[11:21:16] <zeeshan|2> i shoulda bought the frigging mesa for the lathe
[11:21:17] <ssi> do you know if the cpld has the capability for differential inputs?
[11:21:23] <zeeshan|2> the 7i77 has builtin rs-422 interface
[11:21:27] <zeeshan|2> i wouldnt need this external bs
[11:21:28] <ssi> trying to find the appropriate datasheet on xilinx's site
[11:21:32] <pcw_home> Ive fried many (much more fragile than FPGA I/O)
[11:21:53] <ssi> pcw_home: oh well I'm using a schmitt trigger for inputs on these
[11:22:05] <ssi> and the hall state outputs are through a 7407 open collector driver
[11:22:17] * JT-Shop is wondering if a G code file can read a pyvcp spin box?
[11:22:23] <JT-Shop> brain dead today...
[11:22:42] <ssi> zeeshan|2: what, for your modbus?
[11:22:47] <zeeshan|2> ssi yes
[11:22:57] <ssi> can you use a mesa rs422 port for modbus?
[11:23:03] <zeeshan|2> yes i dont see why not
[11:23:10] <ssi> pete used an external adapter as well, and he's got 7i77
[11:23:13] <zeeshan|2> i have a rs232 to rs422 converter
[11:23:16] <ssi> I ordered one cause I wasn't sure
[11:23:24] <ssi> modbus is rs485 I believe
[11:23:29] <ssi> I don't really know anything about the serial mess :P
[11:23:33] <zeeshan|2> wait
[11:23:34] <zeeshan|2> lemme check
[11:23:48] <zeeshan|2> nm
[11:23:50] <zeeshan|2> its rs485
[11:23:50] <zeeshan|2> haha
[11:23:55] <zeeshan|2> but what the hell
[11:24:00] <zeeshan|2> the rs422 pins are the same
[11:24:28] <zeeshan|2> rx+rx-
[11:24:33] <zeeshan|2> should be all we need for modbus
[11:25:51] <zeeshan|2> http://www.hw-server.com/obrazek/compare.gif
[11:25:53] <zeeshan|2> theyre different :/
[11:25:57] <ssi> is rs485 just multipoint rs422?
[11:26:00] <zeeshan|2> yea
[11:26:37] <zeeshan|2> oh well
[11:26:41] <zeeshan|2> that converter isn't that expensive
[11:26:43] <zeeshan|2> its like 8$
[11:26:44] <zeeshan|2> haha
[11:26:47] <ssi> yep
[11:26:48] <zeeshan|2> i just having extra components
[11:26:51] <zeeshan|2> *hatre
[11:26:57] <ssi> what sucks for me is the computer may well be up in the front of the machine
[11:27:05] <ssi> and I'll need a loooooong twisted paair back to the vfd
[11:27:49] <zeeshan|2> well thats one of the benefits of rs485 too
[11:27:53] <zeeshan|2> you can run it over long distances
[11:28:06] <zeeshan|2> i think it was like 3000 feet
[11:28:09] <zeeshan|2> or something ridiculus
[11:28:16] <ssi> i don't think the cpld can do differential inputs at all
[11:28:47] <ssi> looks like LVTTL and LVCMOS33 are its only io standards
[11:28:49] <pcw_home> no no differential hardware on XC95XX CPLDs
[11:29:08] <ssi> so if I need to go that route I'll need external hardware or a different chip
[11:29:18] <ssi> which means I probably won't be bluewiring it into submission :)
[11:29:20] <zeeshan|2> whats better pwm + dir
[11:29:24] <zeeshan|2> or 0-10v
[11:29:27] <ssi> I prefer analog
[11:29:38] <zeeshan|2> i was noticing how the amc drives can handle both
[11:29:48] <ssi> yeah
[11:29:57] <ssi> the 7i77 will give you analog outs, just use them :)
[11:29:58] <zeeshan|2> 7i77 i think is 0-10
[11:30:00] <zeeshan|2> yea
[11:30:12] <zeeshan|2> just figuring out how it'll handle the encoder
[11:30:16] <zeeshan|2> after interpolation
[11:30:24] <ssi> the drive doesn't care about your scales
[11:30:28] <ssi> you're using tach for velocity fb
[11:30:29] <zeeshan|2> i know
[11:30:33] <zeeshan|2> im talkking about 7i77
[11:30:37] <zeeshan|2> i wanan order the mesa hardware
[11:30:41] <ssi> what des the interpolator put out?
[11:30:48] <zeeshan|2> 5v ttl i think
[11:30:49] <zeeshan|2> im checking
[11:30:54] <ssi> differential quadrature?
[11:31:04] <ssi> oh if it's 5v ttl it's probably single ended quadrature?
[11:31:11] <zeeshan|2> http://www.heidenhain.com/fileadmin/pdb/media/img/598_010-21.pdf
[11:31:13] <zeeshan|2> last page
[11:31:18] <zeeshan|2> it outputs ttl it says
[11:31:30] <zeeshan|2> theres 6 pins for "incremental signals"
[11:31:44] <ssi> differential then
[11:31:46] <ssi> yeah you're fine
[11:32:14] <ssi> I'm assuming a0, a1, a2 are A/B/Z?
[11:32:18] <ssi> what's aS?
[11:32:23] <zeeshan|2> haha thats what im trying to figure out
[11:32:53] <ssi> fault detection signal
[11:33:03] <pcw_home> I think theres a fault signal
[11:33:15] <zeeshan|2> http://www.lna.br/~det/Projetos/TCSPD/doc/HeidenheinEXE602.pdf
[11:33:18] <zeeshan|2> this manual is pbetter
[11:33:19] <zeeshan|2> page 10
[11:33:31] <zeeshan|2> a b are some pulse trains
[11:33:40] <zeeshan|2> i think one of them is an index pulse?
[11:33:46] <zeeshan|2> or reference
[11:33:48] <ssi> yeah 0 is index
[11:33:54] <ssi> 1 is A, 2 is B
[11:33:58] <ssi> page 4
[11:34:43] <zeeshan|2> okay so enca+ will be a, encb+ will be b, encR will be idx+
[11:34:53] <zeeshan|2> i think thats all i need i guess
[11:34:59] <zeeshan|2> 7i77 and 5i25
[11:35:05] <zeeshan|2> and a header cable to link the two
[11:35:17] <ssi> the kit comes with the cable
[11:37:01] <ssi> k I'm gonna load up and go try to make the mill move
[11:37:06] <zeeshan|2> :D
[11:38:51] <zeeshan|2> pcw instead of a parallale port cable
[11:38:54] <zeeshan|2> do you guys offer a header
[11:40:11] <zeeshan|2> http://store.mesanet.com/index.php?route=product/product&path=74_80&product_id=192
[11:40:15] <zeeshan|2> also can we use that adapter
[11:40:15] <pcw_home> Because of the relatively high speed signals on the cable a flat cable is not reccomended except for very short connections
[11:40:33] <zeeshan|2> to convert the rs422 port to rs485 for modbus
[11:40:55] <zeeshan|2> ah okay
[11:44:16] <pcw_home> The 7I77 has a RS422/485 port but it cannot currently be used for Modbus because there's no modbus driver for Hostmot2 UARTs
[11:44:48] <zeeshan|2> okay rs485 to rs232 converter it is :D
[11:45:12] <pcw_home> unless you want to write a modbus comp...
[11:45:23] <zeeshan|2> no sir
[11:45:27] <zeeshan|2> :)
[11:47:57] <jdh> I have a converter sitting sitting by my VFD
[11:48:04] <jdh> some day, I will connect it.
[11:48:09] <zeeshan|2> what brand vfd
[11:48:44] <jdh> some whack chinese name
[11:49:23] <zeeshan|2> hey, as long as it has a communication drive
[11:49:25] <zeeshan|2> *driver
[11:49:34] <zeeshan|2> thats all that matters
[11:50:01] <jdh> I have read of others using the same one and having it work.
[11:50:33] <jdh> but, I need to swap out my breakout board or at least add some pins to it first.
[11:50:55] <zeeshan|2> why do you need par port
[11:51:11] <zeeshan|2> itll converse over serial
[11:51:18] <jdh> Nowforever VFD
[11:51:25] <jdh> I want digital IO for start/stop
[11:51:30] <zeeshan|2> o
[11:51:42] <jdh> and limit switches.
[11:51:43] <zeeshan|2> using modbus is safe
[11:51:50] <zeeshan|2> cause say your communication drops
[11:51:55] <zeeshan|2> theres a watchdog in the vfd
[11:51:59] <zeeshan|2> itll kill the power to the motor
[11:52:19] <jdh> that's nice and all, but not how I do things.
[11:52:22] <zeeshan|2> thats why i use it to run/start/stop and do a whole bunch of other things
[11:54:46] <jdh> http://tinyurl.com/mztvex8 If they would have just put $0.005 worth of pins in those holes.
[11:57:03] <ssi> zeeshan|2: have you tried closed loop spindle control over modbus?
[11:57:21] <ssi> jdh: can't you add pins?
[11:58:13] <zeeshan|2> no ssi
[11:58:33] <zeeshan|2> my drive doesnt have real feedback
[11:58:38] <ssi> lol
[11:58:38] <ssi> https://fbcdn-sphotos-f-a.akamaihd.net/hphotos-ak-xap1/t31.0-8/10682378_10152524962778353_1361472827402653378_o.jpg
[11:58:45] <zeeshan|2> its sensorless vector
[11:59:01] <ssi> do you not have an encoder on your spindle?
[11:59:05] <TekniQue> aircraft spruce (y)
[11:59:21] <zeeshan|2> i do have an encoder
[11:59:24] <ssi> TekniQue: they have a significant amount of my money :P
[11:59:35] <zeeshan|2> but thsoe go through a parallel port
[11:59:49] <CaptHindsight> you can't expect them to use Garment Spruce for aircraft
[11:59:49] <ssi> oh right, I forgot your machine is a toy :)
[11:59:54] <zeeshan|2> yes
[11:59:58] <zeeshan|2> all our machines are toys
[12:00:12] <zeeshan|2> :P
[12:00:15] <zeeshan|2> i shouldn't say all
[12:00:20] <ssi> doesn't mean you have to treat them like toys!
[12:00:22] <zeeshan|2> but compared to whats being used in industry right now
[12:00:24] <zeeshan|2> they're toyz
[12:00:32] <ssi> even my little baby g0602 has real encoder feedback via mesa
[12:00:41] <jdh> I can add pins, it is just a PITA
[12:00:52] <zeeshan|2> ssi
[12:00:53] <zeeshan|2> it threads
[12:01:02] <zeeshan|2> i can do css mode
[12:01:04] <zeeshan|2> thats all i care :P
[12:01:09] <zeeshan|2> how it does it, doesnt matter
[12:01:12] <jdh> mine is definitely a toy
[12:01:27] <zeeshan|2> if i really cared
[12:01:29] <TekniQue> ssi: no doubt
[12:01:32] <zeeshan|2> i woulda bought a dual spindle lathe
[12:01:40] <zeeshan|2> that had the ability to transer parts from one spindle to another
[12:01:46] <zeeshan|2> *transfer
[12:01:53] <zeeshan|2> and had turret tool changers for each
[12:01:55] <TekniQue> ssi: they have pretty much the best selection of fasteners and fittings there is
[12:01:56] <zeeshan|2> :D
[12:02:06] <zeeshan|2> TekniQue: they indeed do!
[12:02:18] <zeeshan|2> thats where i bought all my safety wire stuff from
[12:02:22] <TekniQue> and they've been in business for the best part of a decade
[12:02:24] <zeeshan|2> and some really weird bolts i could not find anywhere
[12:02:34] <ssi> TekniQue: I think you mean century :)
[12:02:40] <TekniQue> err
[12:02:42] <TekniQue> yes
[12:02:44] <TekniQue> century
[12:02:48] <ssi> I've been giving them money for a decade
[12:02:56] <TekniQue> my head hurts today
[12:03:04] <TekniQue> they're putting down new carpet in my office
[12:03:09] <TekniQue> and the glue fumes are pretty bad
[12:03:13] <ssi> TekniQue: I have the unfortunate situation that spruce east is within driving distance of me
[12:03:17] <ssi> and if I go in there
[12:03:20] <ssi> I spend a thousand dollars
[12:03:21] <ssi> no matter what
[12:03:39] <zeeshan|2> http://www.aircraftspruce.ca/catalog/topages/drillingjig.php?clickkey=4386
[12:03:42] <zeeshan|2> best drilling jig ever!
[12:03:44] <ssi> last month I went in there and bought two com antennas, two eyeball air vents, and a bunch of bnc fittings
[12:03:48] <ssi> and it was $800
[12:04:31] <ssi> I spend so much godforsaken money in that place that I have a dealer account :P
[12:04:33] <TekniQue> zeeshan|2: yeah a good jig like that saves from those fucking drills that always break
[12:04:40] <zeeshan|2> haha yea dude
[12:04:43] <zeeshan|2> they break so easy
[12:04:47] <TekniQue> drilling small diameter holes through thick metal = recipe for breaking
[12:04:54] <zeeshan|2> especially on a damn drill press
[12:05:24] <zeeshan|2> even with the jig i had many break
[12:05:26] <archivist> use gun drills
[12:05:32] <ssi> ok I'm heading to the apt for realsies
[12:05:33] <ssi> bbiab
[12:05:39] <zeeshan|2> cu
[12:05:50] <zeeshan|2> its only when istarted using cobalt bits
[12:05:53] <zeeshan|2> stuff worked out
[12:09:16] <archivist> I had to get through about 8 inches of brass for someone, was "interesting" I shortened a gun drill to do it
[12:10:55] <zeeshan|2> http://10fastfingers.com/typing-test/english
[12:10:57] <zeeshan|2> do the typing test!
[12:11:09] <zeeshan|2> archivist: interesting :D
[12:11:12] <zeeshan|2> 8"!
[12:11:51] <SpeedEvil> I've been wondering about silly things. You can quite accurately locate a spinning magnet inside an object, with external magnetometers.
[12:11:53] <archivist> too old for tyop tests
[12:12:11] <SpeedEvil> And exert a modest force on it with external magnets - properly phased
[12:12:29] <zeeshan|2> haha archivist
[12:12:37] <SpeedEvil> This could do interesting things for drilling nonmagnetic stuff precisely over long distances
[12:13:32] <archivist> gun driller have managed to drill a long way for ages, so too oil prospectors
[12:13:45] <CaptHindsight> horizontal boring tools are use to go several hundred feet through the ground :)
[12:14:10] <archivist> they even go round bends
[12:14:47] <SpeedEvil> CaptHindsight: yes - I sort of mean horizontal boring tools for metal
[12:15:00] <SpeedEvil> For small workpieces.
[12:16:25] <zeeshan|2> SpeedEvil: you know whatd be cool?
[12:16:31] <zeeshan|2> using a controlled arc
[12:16:41] <zeeshan|2> to drill through a material in a curved manner
[12:16:48] <archivist> rdm they already do that too
[12:16:51] <archivist> edm
[12:16:54] <zeeshan|2> doh
[12:16:58] <SpeedEvil> zeeshan|2: that is going to be _really_ tricky
[12:17:11] <zeeshan|2> i was thinking your magnetic field
[12:17:13] <SpeedEvil> As you can't seperately control the motion of the bits of the arc
[12:17:16] <skunkworks> cradek: opencv installs also..
http://electronicsam.com/images/KandT/testing/Screenshot%20-%2010162014%20-%2007:12:14%20PM.png
[12:18:03] <skunkworks> (I cheat - install firesite - which seems to install everything except python-opencv
[12:18:05] <skunkworks> )
[12:18:10] <skunkworks> firesight
[12:22:07] <CaptHindsight> https://github.com/firepick1/FireSight/wiki
[12:22:45] <CaptHindsight> the Debian install is pretty simple
https://github.com/firepick1/FireSight/wiki/Build-FireSight-%28Linux%29
[12:39:42] <archivist> for the brits near the midlands for the next few days
http://www.midlandsmodelengineering.co.uk/
[12:40:02] <archivist> I intend going tomorrow
[13:09:21] <CaptHindsight> archivist: is that a mini steam engine race?
[13:09:46] <archivist> just display line up I think
[13:19:20] <skunkworks> CaptHindsight: yes - I just followed the simple directions and it seems to install everything you need. I have not tried installing strait from opencv
[13:22:32] <zeeshan|2> yay
[13:22:38] <zeeshan|2> got an email from my supervisor
[13:22:58] <jdh> you have a supervisor?
[13:23:05] <zeeshan|2> 2 of my papers will be getting published in 6 months in international journal of plasticity
[13:23:14] <zeeshan|2> jdh yea
[13:23:20] <jdh> like an advisor?
[13:23:25] <jdh> cool
[13:23:31] <zeeshan|2> you have a supervisor when youre doing masters research
[13:23:38] <zeeshan|2> a professor
[13:24:14] * jdh hides his MS
[13:24:28] <zeeshan|2> whatd you do ms in?
[13:24:48] <jdh> BS mainly... Industrial Science & Technology
[13:26:18] <zeeshan|2> i think my thesis title will be along the lines of
[13:26:54] <zeeshan|2> "Characterizing the Response of Shape Memory Polymer Laminates"
[13:27:17] <zeeshan|2> it'd be nice if they start using them in automotive applications
[13:27:18] <zeeshan|2> for trims
[13:28:42] <zeeshan|2> jdh you design industrial robots for welding right?
[13:29:22] <jdh> so, according to google, supervisor seems to be .au, .uk, .ca. just plain advisor in .us
[13:29:27] <jdh> not really
[13:31:08] <zeeshan|2> ah
[13:31:15] <zeeshan|2> whenever we write articles
[13:31:20] <zeeshan|2> they have to be in the "queen's english"
[13:31:32] <zeeshan|2> so if you write color vs colour
[13:31:34] <zeeshan|2> its a big deal
[13:31:38] <zeeshan|2> i personally like color.
[13:31:40] <jdh> I do do that, but that's not really what I usually do.
[13:31:49] <zeeshan|2> ah okay
[13:32:10] <zeeshan|2> did your ms help you get a job?
[13:32:17] <jdh> not in the lest.
[13:32:19] <jdh> or least
[13:32:23] * Jymmm looks for "Queen's English" on Google Translate
[13:32:29] <CaptHindsight> that's funny I just filed for patent on something similar :p
[13:32:29] <zeeshan|2> haha Jymmm
[13:32:48] <zeeshan|2> CaptHindsight: stop competing!
[13:32:50] <zeeshan|2> :-(
[13:33:10] <zeeshan|2> CaptHindsight: the idea behind my research is
[13:33:27] <zeeshan|2> giving 3m a way to figure out how to characterize their smp to metal laminate behaviour
[13:33:36] <zeeshan|2> so they can select the correct films for the correct application
[13:34:03] <zeeshan|2> im still trying to link the data with fundamental material properties
[13:34:04] <jdh> my new welder will have two ABB arms, but most of the 'robotics' are just linear processing
[13:34:23] <zeeshan|2> if i can do that, we can simulate it using either finite volume or difference
[13:34:40] <zeeshan|2> jdh sounds like an interesting job :P
[13:34:58] <jdh> same as everything, sometimes it's great.
[13:35:35] <jdh> and this morning I got to replace an ancient Polyspede(tm) drive because the maint. guys were taking too long to get on it.
[13:41:17] <CaptHindsight> jdh: do you use linuxcnc for their control?
[13:41:33] <CaptHindsight> the robots
[13:46:07] <jdh> nope
[13:46:46] <jdh> just the built-in ABB sequencing stuff driven by digital IO
[13:47:18] <jdh> I only have two linux boxes here. One for general stuff & fileserving
[13:47:34] <zeeshan|2> poor linux
[13:47:35] <zeeshan|2> no love
[13:47:46] <jdh> one does fission counting
[14:34:37] <ssi> hi
[14:35:54] <zeeshan|2> hi
[14:36:00] <zeeshan|2> dud it work
[14:36:10] <ssi> dunno yet!
[14:36:17] <ssi> https://pbs.twimg.com/media/B0F0o0kCEAAX5XE.jpg:large
[14:36:25] <zeeshan|2> beast
[14:36:29] <ssi> ya
[14:36:43] <zeeshan|2> is input
[14:36:46] <zeeshan|2> and output on the same side??
[14:36:51] <ssi> yep
[14:36:54] <zeeshan|2> wow
[14:36:56] <zeeshan|2> thats a nice design
[14:37:02] <ssi> fans on top
[14:37:18] <ssi> the back half of the depth is all heat sink
[14:38:11] <zeeshan|2> yea
[14:42:55] <ssi> should I mount the other two vfds, or try to program the big one and run the spindle
[14:43:08] <zeeshan|2> mount em
[14:43:18] <zeeshan|2> ssi
[14:43:22] <zeeshan|2> whyd you get 2 different vfds
[14:43:25] <zeeshan|2> for your other 2 motors?
[14:43:38] <ssi> wat
[14:43:53] <zeeshan|2> you have 3 3 phase motors
[14:43:53] <zeeshan|2> right?
[14:43:59] <ssi> yes
[14:44:05] <zeeshan|2> 1 is spindle that you need to speed control
[14:44:09] <zeeshan|2> the other is a coolant pump
[14:44:12] <zeeshan|2> i forgot what the third was
[14:44:15] <ssi> fan
[14:44:17] <zeeshan|2> fan
[14:44:27] <zeeshan|2> so coolant pump and fan need to run at 60hz all the time
[14:44:34] <zeeshan|2> why didnt you just use 1 vfd to run both of em
[14:44:49] <ssi> because I may want to run them independently
[14:44:54] <zeeshan|2> why
[14:44:57] <zeeshan|2> rewason i ask is
[14:45:03] <zeeshan|2> im trying to see if i should grab one
[14:45:04] <zeeshan|2> or two
[14:45:07] <zeeshan|2> one means less wiring
[14:45:08] <zeeshan|2> less clutter
[14:45:11] <archivist> or 6
[14:45:19] <zeeshan|2> in reality my coolant pump and hydraulic pump will only operate at 60hz
[14:45:24] <zeeshan|2> and i dont need to vary the frequency
[14:46:31] <zeeshan|2> i guess wit hthe fan
[14:46:44] <zeeshan|2> it will be nice to have some speed control on it
[14:46:44] <zeeshan|2> like a cpu fan :D
[14:47:06] <ssi> so what happens if you want to machine without coolant?
[14:47:17] <ssi> or do toolchanges without the coolant running
[14:47:20] <zeeshan|2> you just turn off the solenoid
[14:47:23] <zeeshan|2> for the coolant flow
[14:47:40] <zeeshan|2> there you go
[14:47:43] <zeeshan|2> you helped me see it
[14:47:50] <zeeshan|2> with 2 of them off the same drive
[14:47:56] <zeeshan|2> it'd mean both of them need to be on all the time
[14:48:00] <ssi> yep
[14:48:05] <zeeshan|2> UNLESS
[14:48:13] <zeeshan|2> i use a contactor
[14:48:16] <archivist> some vfd can have the loads switched
[14:48:18] <zeeshan|2> between the dmotor
[14:48:26] <archivist> some will die
[14:48:45] <ssi> in my case, I had the VFDs on hand
[14:48:49] <ssi> and I have plenty of cabinet space
[14:48:53] <ssi> so two vfds is an easy solution
[14:49:05] * zeeshan|2 has limited space :/
[14:49:08] <zeeshan|2> i need to make it as tight as possible
[14:49:12] <ssi> plus no need to guess whether two motors will interact badly on a vfd
[14:49:23] <zeeshan|2> they dont
[14:49:30] <zeeshan|2> they use multiple motors off 1 vfd on conveyer lines
[14:49:49] <zeeshan|2> not all, but some.
[14:50:28] <zeeshan|2> my damn coolant pump has no specs on it
[14:50:29] <zeeshan|2> for motor
[14:50:30] <zeeshan|2> =/
[14:53:18] <ssi> wuuut
[14:53:27] <ssi> rated torque at stall: 5.9Nm
[14:53:33] <ssi> maximum theoretical torque: 53Nm
[14:54:12] <ssi> maximum theoretical accel: 14200 rad/S^2
[14:56:42] <PCW> so you need a 70A drive!
[14:57:05] <ssi> haha
[14:57:34] <ssi> the note underneath says that the actual maximum torque is limited by the current limit of the drive
[14:57:48] <ssi> so I guess my maximum torque is somewhere around 10-11Nm :P
[14:57:52] <ssi> with the 10A drives
[14:58:01] <ssi> er not even that high
[15:16:41] <ssi> actually I don't think I'm going to use this teco 1hp vfd I have for the coolant pupm
[15:16:45] <ssi> it's 110v input only
[15:21:13] <ssi> sadly it looks like my servo drives are 110V input also
[15:25:18] <cox> Hi, found theese in the basement, anyone have any ide if they can be used in a cnc aplication Type is AU6162N203E144 Date is almost befour internet 1994.9
http://imgur.com/gxGsKU4
[15:25:53] <cox> Can not find documentation:-(
[15:40:27] <tjtr33> those are tamagawa drives, TBL series ( but theres a load of models and years inside the TBL family )
http://www.tamagawa-seiki.com/english/servo/tbl-if.html
[15:50:14] <t12> https://www.dropbox.com/sc/j2uzpsztu3u1il0/AABZp9IQ9jH2ARcEsVDTVrjLa
[15:50:14] <t12> pew pew
[16:22:29] <_methods> mode burns?
[16:24:12] <Deejay> gn8
[16:32:53] <ssi> so much wiring
[16:32:58] <ssi> SO MUCH WIRING
[16:33:47] <_methods> that wire shit is expensive
[16:50:07] <Jymmm> Just buy one bug ass spool and it's not so bad.
[16:50:19] <Jymmm> Then just use wire markers.
[16:51:04] <JT-Shop> the new 2 x 48 belt grinder works as advertised... it will grind your knuckles 4 times faster than a wheel grinder
[16:51:43] <Jymmm> JT-Shop: EXCELLENT! Do you need bandages or a mop?
[17:12:37] <Tom_itx> ssi at least you got something to wire now
[17:20:45] <ssi> Tom_itx: oh there's always something to wire :D
[17:27:02] <zeeshan|2> yay
[17:27:09] <zeeshan|2> found out the hydraulic pump is a .25 kW motor
[17:27:14] <zeeshan|2> so i can use my 110v vfd
[17:28:42] <zeeshan|2> im assuming
[17:28:45] <zeeshan|2> lstg in german means
[17:28:46] <zeeshan|2> horsepower
[17:28:47] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/14931477374/
[17:32:11] <Jymmm> cradek: ping?
[17:32:36] <zeeshan|2> pong
[17:32:47] <Jymmm> zeeshan|2: *WHACK*
[17:32:49] <Jymmm> ;)
[17:32:57] <zeeshan|2> cabinet before|:
http://i.imgur.com/A0ZB0HS.jpg http://i.imgur.com/NFnnlea.jpg
[17:33:07] <zeeshan|2> cabinet after:
https://www.flickr.com/photos/128539016@N05/15549548321/
[17:33:12] <zeeshan|2> scavenge completed
[17:48:52] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15366599260/in/photostream/
[17:48:56] <zeeshan|2> for these lubrication pumps
[17:49:27] <zeeshan|2> theyre typically 110V/220VDC?
[17:49:28] <zeeshan|2> er
[17:49:29] <zeeshan|2> ac
[17:49:34] <zeeshan|2> anyone know how much current they draw?
[17:52:59] <CaptHindsight> zeeshan|2: not much
[17:53:16] <zeeshan|2> i wonder why it doesnt say the spec on it
[17:54:21] <CaptHindsight> I see plates on machines all the time with missing specs
[17:54:27] <cpresser> lstg =Leistung, thats power
[17:54:43] <zeeshan|2> cpresser thanks :D
[17:54:48] <zeeshan|2> i figured since it said kW :D
[17:54:58] <zeeshan|2> CaptHindsight: i translated "schaltbild innen"
[17:55:03] <zeeshan|2> means "circuit diagram inside"
[17:55:07] <zeeshan|2> wiring i mean
[17:55:16] <cpresser> thats quite international
[17:55:23] <cpresser> yep, thats true
[17:55:33] <zeeshan|2> so i guess maybe the specs are inside :)
[17:56:27] <cpresser> possible. but i would not bet on it. schaltplan = schematic
[17:57:14] <cpresser> try dict.leo.org for translation :)
[17:57:37] <CaptHindsight> few amps
[17:57:37] <zeeshan|2> ive been using google translate
[17:57:37] * cpresser needs some sleep
[17:58:17] <CaptHindsight> it's an intermittent pump
[17:58:57] <zeeshan|2> i understand that
[17:59:14] <zeeshan|2> but i'd like to know what amp it draws :/
[17:59:20] <zeeshan|2> i guess i can measure wire size
[17:59:23] <zeeshan|2> and size a fuse accordingly
[17:59:43] <CaptHindsight> few amps, no need to be that precise
[17:59:57] <zeeshan|2> few = 2amp?
[17:59:57] <zeeshan|2> 5?
[17:59:59] <zeeshan|2> :)
[18:00:02] <CaptHindsight> yeah
[18:01:57] <CaptHindsight> the fuse is there to protect the wiring
[18:06:41] <zeeshan|2> i think this time im going to
[18:06:46] <zeeshan|2> make a master 4 wire come into the box
[18:07:11] <zeeshan|2> so that way i can get both 110v and 220v
[18:07:16] <zeeshan|2> 120/240v i mean
[18:08:11] <tjtr33> did you try to look for it ?
http://www.lubtec.cz/produkty-willy-vogel-en
[18:08:21] <zeeshan|2> yes tjtr33
[18:08:39] <zeeshan|2> i think its too old :D
[18:09:02] <CaptHindsight> what does you amp meter say?
[18:09:07] <CaptHindsight> you/your
[18:09:22] <Jymmm> "Made in china"
[18:09:36] <CaptHindsight> bzzz pop
[18:09:41] <zeeshan|2> CaptHindsight: i havent powered it
[18:09:57] <zeeshan|2> but if i cant find a spec, ill have to do that
[18:11:29] <tjtr33> pull the wires outta the loom back to the fuse or breaker
[18:11:33] <CaptHindsight> what size fuse is on it now?
[18:15:33] <Jymmm> (400 Amp, slow blow)
[18:16:59] * Jymmm looks for staple gun.... Muhahahahahaha
[18:22:52] <ssi> zeeshan|2: I ran 6/3 into the box for that very reason
[18:22:58] <ssi> the servo drives are 110VAC
[18:23:14] <ssi> there are two 115VAC transformers in the box, but they're both too small
[18:23:18] <ssi> one's 750VA, the other 400VA
[18:29:18] <zeeshan|2> 6awg is good for 60A?
[18:29:29] <ssi> yeah
[18:29:29] <zeeshan|2> i forget
[18:29:51] <ssi> I pulled 6/3 and put a subpanel in, and the whole thing is on a 60A
[18:29:54] <zeeshan|2> whats the transformers for?
[18:29:56] <CaptHindsight> it depends on the insulation and how many conductors are in the same raceway
[18:30:04] <zeeshan|2> CaptHindsight: dont get technical with me
[18:30:06] <zeeshan|2> :-)
[18:30:14] <ssi> um one is the control power
[18:30:15] <zeeshan|2> i wanted a ball park number
[18:30:17] <CaptHindsight> so sorry
[18:30:18] <ssi> the original control was all 110
[18:30:26] <laidback01> hello. I have a machine with Mesa 7i43 on a parallel port. There is a 7i33 daughter card attached. It's connected to a servo testing rig. I have some questions about how to get HAL axis to line up with what I think it should be. EG - how do I define which is the X axis - is that the first set listed in the .hal file?
[18:30:37] <ssi> the other is for the spindle chiller, and there's a 100V tap for the original servo drive and the brakes
[18:30:47] <zeeshan|2> ssi ah
[18:30:57] <zeeshan|2> CaptHindsight: i took apart the box
[18:31:00] <zeeshan|2> there were instructions inside
[18:31:02] <zeeshan|2> 220V .8 A
[18:31:03] <zeeshan|2> :-)
[18:31:12] <ssi> laidback01: the 7i33 I believe just has numbered channels, and by convention channel 0 would be X, but you can make it whatever you want
[18:31:32] <CaptHindsight> another mystery solved!
[18:31:36] <zeeshan|2> haha yea
[18:31:41] <zeeshan|2> getting closer day by day
[18:31:47] <zeeshan|2> you guys have been helpful :)
[18:31:53] <ssi> it's a process
[18:32:02] <ssi> I've been going through and redoing the main power wiring
[18:32:07] <ssi> taking out stuff I know I'm not going to use
[18:32:09] <zeeshan|2> ssi i made an offer on those amc drives
[18:32:19] <zeeshan|2> the 150$ ones
[18:32:19] <ssi> $60 each?
[18:32:28] <zeeshan|2> he accepted 300 for all shipped
[18:32:35] <ssi> hm
[18:32:36] <zeeshan|2> shipping for some reason is 80 bux
[18:32:38] <ssi> link?
[18:32:42] <ssi> there were cheaper ones
[18:32:49] <zeeshan|2> i havent paid for it yet
[18:32:49] <zeeshan|2> :p
[18:32:56] <laidback01> Okay, the part where i'm wondering - how do I define a channel as 'X' and another as 'Y', etc. I'm using the by_interface.mesa.hm2-servo as my starting point - it's mostly working, but I've wired up X and Y backwards -- seems an opportunity to see about changing this in software rather than re-doing the wiring.
[18:33:17] <ssi> oh you missed it
[18:33:18] <ssi> haha
[18:33:26] <zeeshan|2> http://www.ebay.ca/itm/111450083423?ssPageName=STRK:MEWAX:IT&_trksid=p3984.m1423.l2649
[18:33:28] <ssi> ended this morning
[18:33:59] <ssi> that's fine, $300 shipped is still pretty reasonable
[18:34:03] <zeeshan|2> see
[18:34:05] <zeeshan|2> i emailed him saying
[18:34:05] <zeeshan|2> http://www.ebay.ca/itm/APPLIED-MOTION-CONTROLS-BE25A20ACG-INV-BRUSHLESS-POWER-SERVO-/111341687474
[18:34:13] <zeeshan|2> whats the difference between the ones hes selling for 50 bux
[18:34:17] <zeeshan|2> and the one he's selling for 150
[18:34:17] <zeeshan|2> lol
[18:34:26] <zeeshan|2> thats why i havent paid for em yet
[18:34:37] <zeeshan|2> the 50$ ones look more diserable not only cause theyre cheaper
[18:34:41] <ssi> damn 13 available at $50 apiece? that's pretty good
[18:34:42] <zeeshan|2> but he pictures connectors for em
[18:34:52] <zeeshan|2> what is it showing you for shipping?
[18:35:00] <zeeshan|2> for me its showing 63$ shipping for those 50$ ones
[18:35:07] <ssi> $33
[18:35:12] <ssi> and my favorite part is this:
[18:35:18] <ssi> MOST ITEMS WILL BE PROCESSED WITHIN 3 BUSINESS DAYS.
[18:35:30] <ssi> $33 for shipping and I have to wait three business days for you to get off your ass and ship it?
[18:35:35] <zeeshan|2> haha
[18:36:02] <ssi> my PCBs have made it to the states
[18:36:08] <laidback01> hmm, my shipping on that is $24.62 didn't think it would vary that much.
[18:36:23] <zeeshan|2> nice dude
[18:36:49] <zeeshan|2> i wonder if the hydraulic pump on the machine
[18:37:01] <zeeshan|2> was running all the time w/ the original machine.
[18:38:30] <laidback01> hey, what would those be rated for? I've got a 3 axis piece of iron with (I think) X & Y axis servo motors ... i keep wanting to say 200oz/in but that doesn't seem right. they look like about 1/2 hp motors to me - but I don't think they rate them like that either.
[18:38:47] <zeeshan|2> those drives are overkill
[18:38:53] <zeeshan|2> theyre meant for 2hp servos
[18:39:21] <laidback01> yeah, but at $50ea... that's quite a bit better than what I was expecting!
[18:39:43] <ssi> they're great drives, especially at that price
[18:39:51] <zeeshan|2> the only thing that wories me
[18:39:53] <zeeshan|2> is they're blown up
[18:39:54] <zeeshan|2> :D
[18:39:59] <laidback01> is it a situation where you get too much controller for the motor, you'll get bad performance?
[18:40:03] <ssi> they're pretty hard to blow up
[18:40:06] <ssi> laidback01: nah should be fine
[18:40:08] <zeeshan|2> thats why i emailed why one are 150 and the other is 50
[18:40:19] <zeeshan|2> makes no sense to me
[18:40:24] <zeeshan|2> from the same seller
[18:40:39] <zeeshan|2> the only difference i see inthe description is the 150$ came from a working machine
[18:40:56] <laidback01> oh...
[18:41:02] <laidback01> they take hall-effect sensors
[18:41:07] <ssi> oh it's the same seller? weird
[18:41:10] <zeeshan|2> yea ssi
[18:41:20] <ssi> laidback01: yeah, if you use brushless motors you need them
[18:41:28] <ssi> laidback01: if you have brush motors you don't need the hall effects
[18:42:01] <laidback01> no, no, you can use optic sensors as well can't you? I'd thought Hall effect was something you wanted to avoid? Hmm, I've a lot to learn, I know ...
[18:42:28] <laidback01> course hall effect ought to be a lot more impervious to dirt and fly poop.
[18:42:32] <zeeshan|2> youcan use 3 types w/ that drive
[18:42:36] <ssi> the hall effects are built into the motors
[18:42:41] <ssi> not for limit switches or anything like that
[18:42:43] <zeeshan|2> hall, encoders (optical), tachometer
[18:42:44] <ssi> it's for commutation
[18:43:39] <CaptHindsight> do you guys get gmail from idiots that start accounts using your address since they have very similar account name and type it in wrong half the time?
[18:43:40] <ssi> zeeshan|2: so I just hooked the pc up to the vmc for the first time
[18:44:05] <ssi> the only thing wired to the 7i77 is the spindle encoder
[18:44:08] <ssi> and I'm not getting any counts :(
[18:44:12] <laidback01> okay. well... back to trying to figure out the axis
[18:45:09] <zeeshan|2> why
[18:45:13] <zeeshan|2> no power to the encoder?
[18:45:30] <zeeshan|2> CaptHindsight: no
[18:46:35] <laidback01> hey... so in the .hal file. Is it top-down loading.. so the first axis it sees always ends up being X? Or, since i'm using a 7i33, is it based on the fact that it's the 0.encoder and 0.pwm makes it X?
[18:47:39] <zeeshan|2> for me, using standard stuff
[18:47:42] <zeeshan|2> X axis is 0.
[18:47:46] <zeeshan|2> Z axis is 2.
[18:47:49] <laidback01> I guess what I'm getting at - I don't quite see where (in the .ini or the .hal) where - how is "Axis X" assigned to this channel? it's all labled 0.enable, axis.0.amp-enable-out, hm2_....0.encoder.00 etc
[18:48:03] <laidback01> okay, is that because that's how it's loaded up by default?
[18:48:11] <laidback01> or where do you DEFINE that X is 0?
[18:48:18] <zeeshan|2> when you associate the pins
[18:48:29] <zeeshan|2> you'll see it linked to a particular pin on your parallel port
[18:48:45] <laidback01> allright - this is in the .hal file?
[18:48:51] <zeeshan|2> i dont remember the exact syntax and i'm not in front of the linux comp
[18:48:54] <zeeshan|2> but in the .hal file
[18:49:08] <zeeshan|2> you'll see something like [AXIS 0].blah blah something parport.pin
[18:49:14] <laidback01> look, I'm sorry - I'm a newb, I've been reading the man pages, but not quite finding the answer to axis assocation
[18:49:21] <laidback01> okay, thanks, I'll look for that ;)
[18:49:26] <zeeshan|2> its okay
[18:49:29] <zeeshan|2> no need to be sorry
[18:49:32] <zeeshan|2> we're all here to help :P
[18:49:38] <zeeshan|2> it's confusing as hell when you first work with it
[18:51:20] <laidback01> someday.. I'll get it ;)
[18:51:20] <laidback01> lol
[18:53:38] <laidback01> oh... gee, pncconf is handy for this.
[19:06:52] <laidback01> okay.. I'm sure this is a common error. Using pncconf, I've got my axis lined up with the wiring, so that's cool.
[19:07:35] <laidback01> now though, when I fire up linuxcnc - I turn on manual control, and try to step .1in, I get "Joint 0 following error" right off the bat
[19:07:56] <laidback01> is that because my encoders are not letting it know what's going on with enough accuracy?
[19:08:43] <laidback01> more likely it's that I don't have something setup right
[19:09:21] <laidback01> all I have are some simple mabuchi motors (little R/C car ones), and 3 homemade really simple drivers. it's just a test kit to get the hang of it.
[19:10:02] <laidback01> the encoders are - I think - hall effects - but the mabuchies don't spin over 2k rpm so should be good.
[19:11:55] <laidback01> following error...
[19:14:37] <PetefromTn_> you can set your follwing error up high until you get the parameters set right..
[19:15:19] <laidback01> yeah, I'm curious about the Derivative and Integrator. Since I have VERY simple controllers... I'm going to leave those at 0
[19:42:12] <zeeshan|2> this makes no sense
[19:42:18] <zeeshan|2> the .5hp single phase 240v input
[19:42:32] <zeeshan|2> says you need to size the wire for 15A!!
[19:43:04] <zeeshan|2> 240V*15A = 3600W = 4.82HP
[19:43:10] <zeeshan|2> a little overkill?
[19:43:20] <CaptHindsight> zeeshan|2: what says that?
[19:43:26] <zeeshan|2> the teco vfd manual
[19:43:39] <CaptHindsight> thats based on the electrical code
[19:43:42] <zeeshan|2> http://factorymation.info/acdrives/FM50manual.pdf
[19:43:43] <zeeshan|2> page 13
[19:43:55] <CaptHindsight> #14
[19:44:03] <zeeshan|2> yea
[19:44:40] <CaptHindsight> that is why you don't see #18 being used
[19:48:57] <zeeshan|2> CaptHindsight: check this out
[19:49:21] <zeeshan|2> sec
[19:54:14] <CaptHindsight> did I miss it?
[19:55:27] <ssi> lol
[19:57:19] <Tom_itx> yup
[19:57:19] <zeeshan|2> sorry
[19:57:20] <zeeshan|2> http://i.imgur.com/Fr7BQhg.png
[19:57:29] <zeeshan|2> so thats all the stuff that needs to be powered
[19:57:36] <zeeshan|2> im missing the lubricator, but thats only .8A
[19:57:43] <zeeshan|2> if you total all that stuf up
[19:58:01] <zeeshan|2> i need a wire thats rated for 120A!!!
[19:58:06] <zeeshan|2> going into the box!
[19:58:15] <zeeshan|2> something isn't right :P
[19:59:06] <CaptHindsight> where did you get those current ratings from?
[19:59:12] <zeeshan|2> which ones?
[19:59:18] <zeeshan|2> the vfd ones are right from the manuals
[19:59:24] <zeeshan|2> the servo amp i calculated
[19:59:28] <zeeshan|2> the psu ones is whats on the psu
[19:59:29] <CaptHindsight> the ones in the drawing in that link ^^
[19:59:47] <zeeshan|2> servo amps can output 2256W
[19:59:57] <zeeshan|2> so 2256/110 ~21A
[20:00:02] <zeeshan|2> i added a bit more buffer to make safer
[20:00:04] <CaptHindsight> 1/2 HP isn't 15A
[20:00:45] <zeeshan|2> well a 1/2hp single phase draws twice as much current
[20:00:48] <zeeshan|2> cause its single phase
[20:00:57] <zeeshan|2> so it'll draw 1hp = 746W
[20:01:11] <zeeshan|2> thats 3.1A
[20:01:22] <zeeshan|2> i have no clue why the vfd manufacturer says i need a 15A wire
[20:01:43] <CaptHindsight> because thats the smallest size you should use for code
[20:02:10] <CaptHindsight> they don't know where you're going to mount it
[20:02:49] <zeeshan|2> well there is a huge difference between 3.1A
[20:02:52] <zeeshan|2> and 15A!
[20:02:52] <zeeshan|2> :P
[20:03:01] <zeeshan|2> even the 10 hp drive they recommend 60A
[20:03:05] <zeeshan|2> when you work out the math you get 32A
[20:03:32] <CaptHindsight> ok, so you're trying to figure out what size wire and how to protect it all
[20:04:09] <zeeshan|2> yea
[20:04:20] <Tom_itx> put a breaker box inside your control pannel
[20:04:31] <Tom_itx> attach the proper breakers for each circuit
[20:04:38] <zeeshan|2> Tom_itx: still doesnt change the fact
[20:04:42] <zeeshan|2> that the wire going into the box will be massive
[20:04:46] <zeeshan|2> according to these numbers
[20:04:47] <CaptHindsight> well what happens is that they take current ratings like stall currents and max currents and then go up to larger recommended sizes
[20:04:48] <Tom_itx> uh huh
[20:04:57] <Tom_itx> run 00 wire to the breaker
[20:05:34] <Tom_itx> you should see the size of the junction box for all the machines in my bud's shop
[20:07:02] <CaptHindsight> zeeshan|2: you have 3 separate VFD's?
[20:07:08] <zeeshan|2> yea
[20:07:10] <zeeshan|2> i will
[20:07:15] <CaptHindsight> just making sure
[20:07:37] <Tom_itx> i was halfway joking and halfway not...
[20:07:45] <Tom_itx> about the breaker box
[20:08:04] <zeeshan|2> Tom_itx: my plan was to feed one big ass wire
[20:08:19] <roycroft> i want this, but i have nowhere to put it, no way to haul it, and no money to buy it:
[20:08:21] <roycroft> http://eugene.craigslist.org/tld/4700569534.html
[20:08:21] <zeeshan|2> which goes through my big ass disconnect switch
[20:08:32] <zeeshan|2> then goes to fuse, then after that distributes using terminals
[20:08:42] <zeeshan|2> and theres fuses in line before each device
[20:08:54] <zeeshan|2> roycroft: thats so nice
[20:08:54] <zeeshan|2> lol
[20:09:30] <roycroft> it's a beautiful lathe
[20:09:34] <Tom_itx> gear drive head?
[20:09:35] <roycroft> and not a bad price for what it is
[20:09:42] <Tom_itx> does it have a gear set too?
[20:10:06] <roycroft> i don't know
[20:10:19] <Tom_itx> kinda important if you wanna do threads
[20:10:19] <CaptHindsight> the overcurrent protection is sized to protect the conductors, the devices all have their own protection
[20:10:20] <roycroft> it has a quick change gear box
[20:10:31] <roycroft> but it would still need some change gears
[20:10:34] <Tom_itx> yeah
[20:10:42] <Tom_itx> sometimes hard to find
[20:10:52] <CaptHindsight> wire size is based on the type of load along with max current
[20:11:13] <roycroft> because of the three reasons listed above, i'm not going to do further research on it
[20:11:24] <roycroft> it's nice for wishing and drooling though
[20:11:24] <Tom_itx> don't they also factor in a x2 safety factor for load?
[20:11:38] <Tom_itx> or 1.5 at least
[20:12:47] <CaptHindsight> well you usually only have ~70% of the actual load allowed for the rating of the conductor and breaker/fuse
[20:13:34] <CaptHindsight> so yeah 70% or 1.5X depending on the way you want to look at it
[20:14:47] <zeeshan|2> if you follow nec guideline, for a 10hp motor, the FLA is 28A @ 230V (Table 430.25). The ampacity of the branch circuit conductor based on table 430.122 says 125% of FLA. so 28*1.25=35A
[20:14:55] <zeeshan|2> its no where close to the 60A the manufacturer is recommending
[20:15:07] <zeeshan|2> so i'm either missing something
[20:15:14] <zeeshan|2> or theyre being super safe
[20:15:51] <CaptHindsight> thats why I was asking about where those current ratings are coming from
[20:16:51] <zeeshan|2> for 1HP they recommend 4.2A, 1.25*4.2=5.25A
[20:16:57] <zeeshan|2> no where close to the 15
[20:16:57] <zeeshan|2> haha
[20:17:59] <CaptHindsight> http://www.lbcc.edu/Electrical/documents/MotorCenter2.pdf
[20:18:53] <CaptHindsight> has an example
[20:19:30] <zeeshan|2> lol i added wrong according to my current diagram
[20:19:42] <zeeshan|2> 60+15+15+25+25+25+1+10+1+3 = 180A!
[20:19:55] <CaptHindsight> yeah, thats not how you do it
[20:20:05] <zeeshan|2> ??
[20:20:42] <CaptHindsight> plus you would have #000 200A thhn copper with the smaller motors all tied together
[20:20:53] <CaptHindsight> if you did it that way
[20:22:09] <CaptHindsight> you need to go by the actual max currents and create your branches
[20:22:59] <zeeshan|2> reading through your example
[20:23:12] <CaptHindsight> make up the same drawing only this time with the max currents vs the ampacity of the conductors they recommend
[20:24:47] <zeeshan|2> only 3 things on there
[20:24:49] <zeeshan|2> dont have actual currents
[20:24:56] <zeeshan|2> and i guess the servo amplifiers
[20:25:00] <zeeshan|2> theyre also 21A not 25A
[20:25:23] <CaptHindsight> I really wanted you to see the NEC table
[20:26:47] <zeeshan|2> 3+1+10+21+1+21+21+5.25+5.25+35
[20:26:48] <CaptHindsight> you have servo amps and VFD's so that is different than using AC motors
[20:27:01] <zeeshan|2> 123.5A
[20:29:30] <CaptHindsight> do you have a service >100A at the house?
[20:29:36] <zeeshan|2> yea its 200A
[20:30:16] <ssi> zeeshan|2: my machine's manual says 24KVA theoretical full load
[20:30:21] <ssi> and I'm going to run it all on a 60A breaker
[20:30:24] <ssi> you'll be fine
[20:30:27] <zeeshan|2> haha
[20:30:30] <zeeshan|2> mine says 40A
[20:30:31] <zeeshan|2> 240VAC
[20:30:32] <zeeshan|2> 3ph.
[20:30:41] <zeeshan|2> so thats why im wondering how im suddenly going up to 123-180A
[20:30:49] <zeeshan|2> but i guess the servo amps are diff
[20:30:50] <ssi> because you're adding up a bunch of bogus numbers
[20:31:14] <ssi> size the breakers to the wire
[20:31:36] <ssi> run 6awg to the machine, run it on a 60A breaker, and stop stressing :)
[20:31:56] <ssi> for one thing, you'll find that the biggest breaker you can buy for a home panel is 70A, and it's four times as much money as a 60A
[20:32:19] <zeeshan|2> i have a 100A breaker
[20:32:31] <Tom_itx> just stick a chunk of aluminum in place of the breaker!
[20:32:34] <zeeshan|2> lol
[20:32:51] <Tom_itx> if it gets too damn hot it'll melt
[20:33:18] <zeeshan|2> ssi my 100A breaker in the garage
[20:33:21] <zeeshan|2> feeds the 100A panel in the house
[20:33:26] <zeeshan|2> the garage panel is 200A
[20:34:22] <ssi> if the original box on your machine said 40A, why would you do anything bigger?
[20:34:39] <zeeshan|2> cause ive added 3 servo amps
[20:34:49] <zeeshan|2> which can potentially draw 21A each
[20:34:56] <ssi> "potentially"
[20:35:08] <zeeshan|2> you always size the wire for "potentially"
[20:35:10] <zeeshan|2> :)
[20:35:20] <zeeshan|2> in reality, you're right it wont hit it
[20:35:22] <ssi> no, no you don't
[20:35:26] <zeeshan|2> like what are the chances
[20:35:34] <ssi> those servo amps could "potentially" draw infinite amps
[20:35:36] <ssi> if they short
[20:35:39] <zeeshan|2> all 3 servo amps are gonna draw 21+21+21A!
[20:35:44] <ssi> you don't size the wire for infnite amps
[20:35:50] <zeeshan|2> okay i said it wrong
[20:35:54] <zeeshan|2> you size it for full load amps
[20:35:55] <zeeshan|2> * 1.25
[20:35:58] <ssi> dude my 25hp vfd is 60A full load
[20:36:01] <ssi> your servo amps are not 60A
[20:36:02] <ssi> I promise
[20:36:12] <zeeshan|2> they are at 120vac..
[20:36:28] <ssi> alright never mind
[20:36:51] <ssi> I forgot you're the eletrical wizard around here
[20:37:20] <zeeshan|2> i've sized stuff in the past for power distribution
[20:37:22] <zeeshan|2> so i have a clue about it
[20:37:31] <zeeshan|2> usually we'd overkill it
[20:37:40] <zeeshan|2> but in my case, its getting too big
[20:37:52] <zeeshan|2> hence why im conversing it
[20:37:53] <zeeshan|2> *here
[20:38:07] <CaptHindsight> 5000W is way to high for the servo amps
[20:38:15] <CaptHindsight> 5000W ea
[20:38:18] <zeeshan|2> how are you getting 5000W?
[20:38:22] <zeeshan|2> theyre at 120vac
[20:38:37] <zeeshan|2> 21*120 = 2500W
[20:39:16] <CaptHindsight> how do you set the current limit on the servo amplifiers?
[20:39:31] <zeeshan|2> i believe there are some dip switches
[20:39:42] <CaptHindsight> what setting will you use?
[20:40:24] <zeeshan|2> maximum for Z axis
[20:40:37] <zeeshan|2> which i think is 12.5A continuous
[20:42:00] <CaptHindsight> I lost track of what motors they are (voltage, type etc)
[20:42:07] <zeeshan|2> hah
[20:42:59] <zeeshan|2> the smaller x and y motors are 1180W
[20:42:59] <CaptHindsight> but you're going to find after adding it all up properly that SSI is in the ballpark
[20:43:12] <zeeshan|2> the Z axis 2200W
[20:44:09] <zeeshan|2> so take Z axis for example, 2200W/115 = 19.15*1.25 = 24A
[20:44:44] <zeeshan|2> 1180/115 = 10.26*1.25 = 13A
[20:55:21] <ssi> so this is disconcerting
[20:55:38] <ssi> I'm going through the manual for the vfd, trying to set everything up in the order it tells me to
[20:55:43] <ssi> and most of the options aren't available
[20:55:50] <ssi> it skips past them in the programming menus
[20:55:55] <zeeshan|2> haha what
[20:56:46] <zeeshan|2> ssi
[20:56:48] <zeeshan|2> i dont know if you know this
[20:56:55] <zeeshan|2> but i spent a year designing these things:
[20:57:09] <jdh> might explainit.
[20:57:10] <zeeshan|2> http://s130.photobucket.com/user/turbozee84/media/null_zpsde82b15a.jpg.html?sort=3&o=185
[20:57:22] <zeeshan|2> not a year making those specific things
[20:57:24] <zeeshan|2> but in that industry
[20:57:33] <zeeshan|2> http://i130.photobucket.com/albums/p252/turbozee84/null_zpsc0883b70.jpg
[20:57:43] <zeeshan|2> i was responsible for all the mechanical stability , ventilation
[20:57:57] <zeeshan|2> once in a while i had to size bus bars
[20:58:25] <ssi> I'm truly happy for you
[20:58:37] <zeeshan|2> so plz don't assume.
[20:58:38] <zeeshan|2> thanks.
[20:59:29] <ssi> I haven't done anything but bow to your amazing wisdom
[20:59:38] <zeeshan|2> ...
[20:59:52] <Tom_itx> .
[21:01:05] <ssi> .
[21:01:07] <ssi> doh
[21:01:22] <Tom_itx> .
[21:08:49] <XXCoder> yo
[21:14:47] <zeeshan|2> no matter how i ad up the numbers
[21:14:50] <zeeshan|2> i keep gett 120A.
[21:15:05] <zeeshan|2> even after derating to servo amps to what they're driving
[21:15:13] <XXCoder> use numbers GOP use :P
[21:15:22] <XXCoder> add numbers up then use whatever answer you want
[21:15:27] <zeeshan|2> the only thing i can think of
[21:15:34] <zeeshan|2> is having 2 seperate wires
[21:15:42] <zeeshan|2> for 240V circuits and 110V circuits
[21:16:31] <zeeshan|2> nm
[21:16:34] <zeeshan|2> they do make a 120a breaker
[21:16:35] <zeeshan|2> http://www.ebay.ca/itm/General-Electric-125-AMP-main-breaker-2-Pole-Type-THQL-120-240-Volt-/151414602388?pt=BI_Circuit_Breakers_Transformers&hash=item2341037a94
[21:50:59] <zeeshan|2> http://i.imgur.com/BOwHOMh.png
[21:51:05] <zeeshan|2> i think that'll work
[21:51:09] <zeeshan|2> whatcha think CaptHindsight? :)
[21:51:16] <zeeshan|2> 125A incoming
[22:05:07] <CaptHindsight> zeeshan|2: "image no longer available"
[22:05:14] <zeeshan|2> CaptHindsight: 1 sec.
[22:05:19] <zeeshan|2> well 1min :)
[22:05:24] <CaptHindsight> 10 min
[22:05:29] * XXCoder starts timer
[22:06:30] <XXCoder> ding
[22:07:34] * ssi wonders how much fun it's going to be to pull 1/0 in a garage
[22:11:28] <zeeshan|2> wow i took longer
[22:17:16] <ssi> logger[psha]:
[22:17:16] <logger[psha]> ssi: Log stored at
http://psha.org.ru/irc/%23linuxcnc/2014-10-17.html
[22:17:37] <zeeshan|2> CaptHindsight:
[22:17:38] <zeeshan|2> http://i.imgur.com/q0LEdRw.png
[22:30:44] <CaptHindsight> zeeshan|2: are those numbers the actual current X 1.25?
[22:31:11] <zeeshan|2> yes, so for the 10hp vfd, actual draw is 28A (FLA)
[22:31:21] <zeeshan|2> and you get 35A after 1.25
[22:33:13] <zeeshan|2> i think im gonna play it safe
[22:33:18] <zeeshan|2> and just run 2awg/4 wire in the main
[22:33:25] <zeeshan|2> and run a 100A breaker
[22:33:30] <zeeshan|2> i highly doubt ill have problems then
[22:33:37] <zeeshan|2> if i do, i can upgrade to a 125A breaker on the same wire
[22:33:42] <XXCoder> use 1kA breaker ;)
[22:33:45] <XXCoder> just trollin'
[22:34:05] <CaptHindsight> those numbers are more realistic
[22:34:21] <zeeshan|2> CaptHindsight: the thing i was doing wrong
[22:34:28] <XXCoder> its definitely better to have fuse breaks before more expensive stuff
[22:34:29] <zeeshan|2> was not balancing the 110v loads on each leg
[22:34:44] <zeeshan|2> so all the 110v loads were on L1
[22:35:52] <zeeshan|2> last update
[22:35:53] <zeeshan|2> http://i.imgur.com/cHda1MQ.png
[22:35:53] <zeeshan|2> :D
[22:36:05] <XXCoder> in least that didnt take 11 mins lol
[22:36:10] <zeeshan|2> hahah
[22:36:17] <zeeshan|2> my 1 min is very long!
[22:36:22] <XXCoder> you should have picked mine. not picked bpoth mine and capt and added ogether!
[22:36:29] <CaptHindsight> I napped
[22:36:45] <XXCoder> I have kids. I didnt before zee started
[22:36:47] <XXCoder> ;)
[22:36:54] <zeeshan|2> haha
[22:41:51] <jdh> s/have/made/
[22:58:06] <CaptHindsight> http://www.3ders.org/articles/20141016-ornl-reveals-technique-to-precisely-control-3d-metal-printing-process-at-the-microscale.html
[22:58:23] <CaptHindsight> Ryan Dehoff, staff scientist and metal additive manufacturing lead at ORNL said that this method will allow engineers to make metal parts that are stronger, lighter and function better than those made by conventional manufacturing processes.
[22:58:46] <CaptHindsight> suck on that you chip makers!
[22:59:32] <ssi> they really really really want to obsolete us don't they
[22:59:39] <CaptHindsight> heh
[23:00:56] <CaptHindsight> "the technique can control the microstructure, or crystallographic texture," this is the key part along with varying the alloy for the layers
[23:01:53] <CaptHindsight> probably 20+ years off from being used in mass production
[23:02:06] <CaptHindsight> the patents have to expire first
[23:28:38] <zeeshan|2> CaptHindsight: again i think it cant be used past prototyping
[23:28:44] <zeeshan|2> or very expensive parts
[23:28:54] <zeeshan|2> i mean there is a reason why we still have casting
[23:29:00] <zeeshan|2> and not everything is being cnc machined
[23:29:27] <zeeshan|2> do you think they'll make the process much faster in the future?
[23:41:33] <CaptHindsight> that's the trick, multiple electron beams or a way to modulate a large diameter beam
[23:42:40] <CaptHindsight> right now it's like having an inkjet with only one nozzle, with thousands of nozzles you can print single pass at high res into the meters per second
[23:43:55] <CaptHindsight> make the equivalent with an e-beam or laser
[23:45:29] <zeeshan|2> ohh
[23:45:39] <zeeshan|2> i got you!
[23:46:04] <zeeshan|2> so its like shooting a raster laser pattern
[23:46:04] <zeeshan|2> all over the layer
[23:46:07] <zeeshan|2> in one snapshot
[23:46:27] <zeeshan|2> but doing it with electrons
[23:46:28] <CaptHindsight> yes
[23:46:39] <zeeshan|2> okay i can see that being quick
[23:46:44] <zeeshan|2> but yous till need to lay the powder
[23:46:49] <zeeshan|2> so it'd be "snapshot"
[23:46:49] <CaptHindsight> lcd for electrons or a laser
[23:46:54] <zeeshan|2> "powder scatter"
[23:46:58] <zeeshan|2> "snapshot" powder scatter
[23:47:17] <zeeshan|2> so if you want 0.001 precision, you'd need to do that process 1000 times to get to 1" height
[23:47:24] <CaptHindsight> yes, an entire plane printed in one instant vs just a single spot at a time
[23:47:41] <zeeshan|2> i can see the powder spreading taking longer
[23:47:44] <zeeshan|2> than the electron snaposhot
[23:48:02] <zeeshan|2> 1s for powder scatter, 0.1 s for electron snapshot
[23:48:20] <zeeshan|2> would take 18 min to print 1"
[23:48:45] <zeeshan|2> random numbers just to get a rough estimate :P
[23:49:15] <CaptHindsight> you get it
[23:50:00] <CaptHindsight> I should patent that now just to screw everything over for the next 20+ years
[23:50:32] <zeeshan|2> hahaha
[23:50:37] <zeeshan|2> save the chip making world!
[23:50:38] <zeeshan|2> :D
[23:53:45] <CaptHindsight> what if you didn't have to spread the powder
[23:54:15] <zeeshan|2> how else can you put a thin layer of powder
[23:54:18] <CaptHindsight> what if it worked like an electrostatic printer or laser printer
[23:54:28] <zeeshan|2> so a charge is on the layer
[23:54:32] <zeeshan|2> which attracts powder
[23:54:33] <zeeshan|2> like powdercoating
[23:54:47] <zeeshan|2> that could work!
[23:54:55] <CaptHindsight> or you e-beam in a constant spiral
{kind=link}
{kind=link}
{kind=link}
{kind=link}
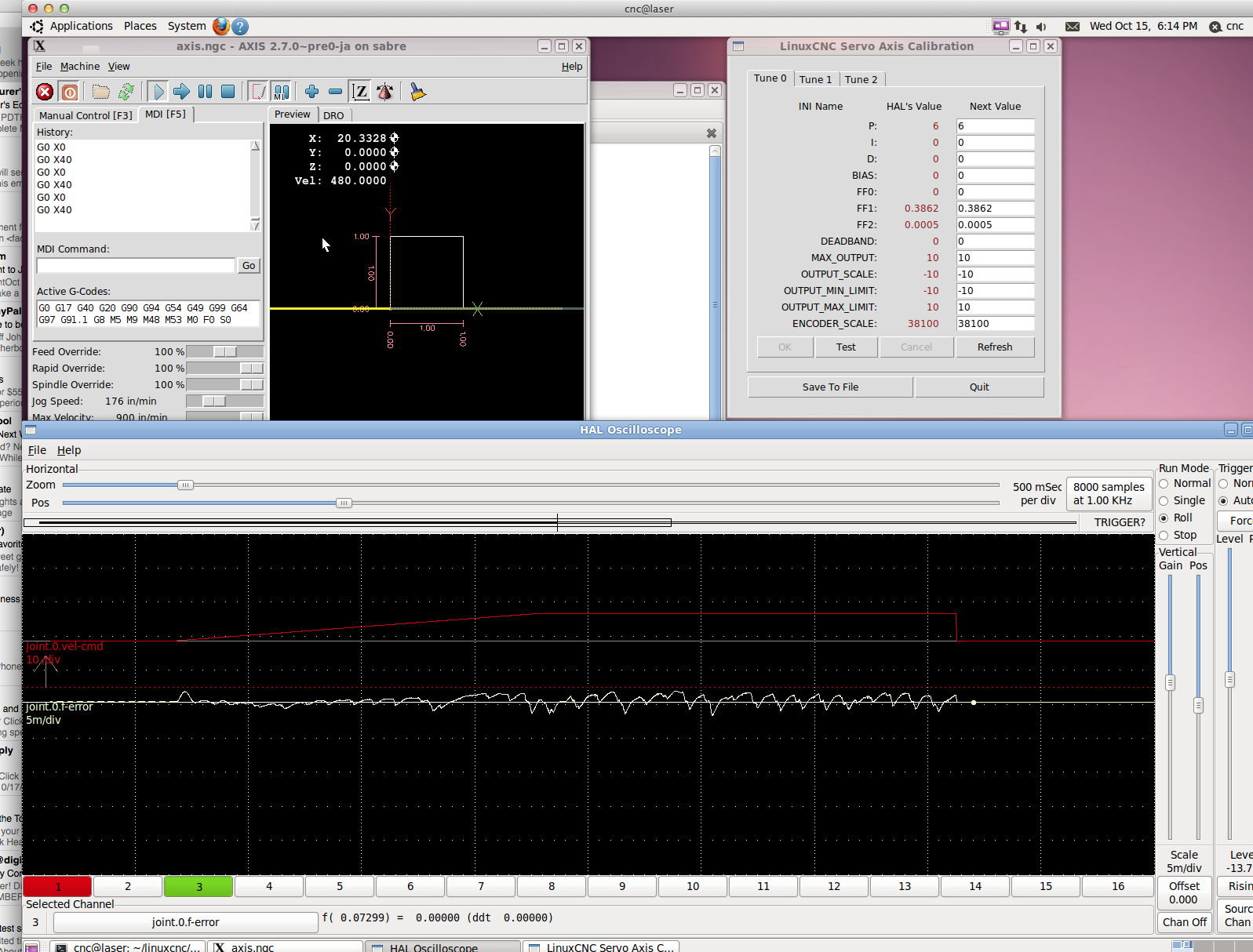{kind=link}
{kind=link}
{kind=link}
{kind=link}
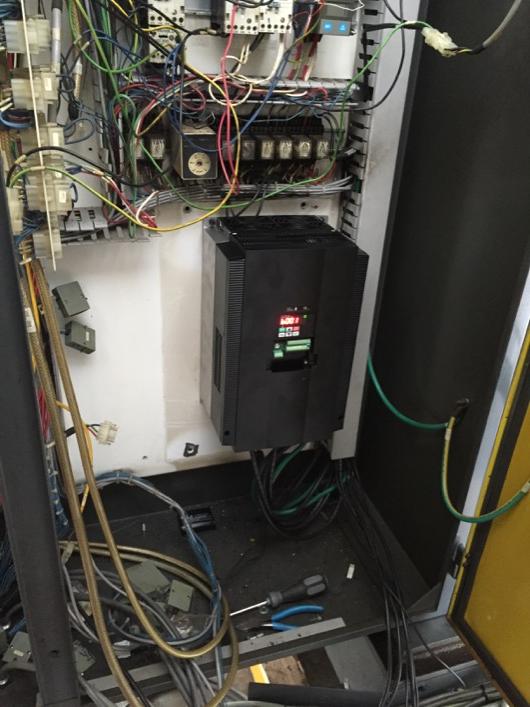{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}