Back
[00:10:23] <XXCoder> damn
[00:10:26] <XXCoder> https://www.sparkfun.com/news/1621
[00:10:30] <XXCoder> pretty cool
[00:12:36] <ssi> hilariously, that's not unlike how I plan to build real airplanes with my laser :D
[00:12:45] <XXCoder> :)
[00:12:54] <XXCoder> man I so want to finish my cnc
[00:13:03] <ssi> so, I had marginal success getting these drives wired up
[00:13:05] <XXCoder> yet I'm too busy and willpower is lacking lately
[00:13:19] <ssi> the drive enables, and the motor locks up
[00:13:31] <ssi> but applying voltage to the reference input doesn't make it turn like I'd expect
[00:34:21] <CaptHindsight> http://linuxgizmos.com/allwinner-reveals-new-octa-core-and-64-bit-quad-core-socs/ finally shipping
[00:38:07] <zeeshan|2> thats a nice plane
[00:38:49] <zeeshan|2> ssi alive?
[00:38:59] <ssi> ya
[00:39:06] <zeeshan|2> i probed the wires
[00:39:08] <zeeshan|2> and disconnected em
[00:39:18] <zeeshan|2> x y only use 3 of the pins on those servo connectors out of 5..
[00:39:27] <zeeshan|2> 2 are +/- and 1 is motor ground
[00:39:31] <zeeshan|2> now the Z axis is a bit weird
[00:39:37] <zeeshan|2> it has thsoe 2 +/- . ground
[00:39:39] <zeeshan|2> and 2 extra wires
[00:39:49] <zeeshan|2> 1 of those wires for some reason has an inline capacitor with it
[00:39:53] <zeeshan|2> no clue what those 2 do :P
[00:40:13] <zeeshan|2> the only thing i can think of is it's a brake
[00:41:11] <zeeshan|2> fakin servos
[00:41:13] <zeeshan|2> so comlpicated
[00:41:17] <zeeshan|2> need to convert to steppers! :D
[00:44:23] <zeeshan|2> okay so i hooked up an ohmmeter between those two unknown pins
[00:44:26] <zeeshan|2> it measures 28 ohms
[00:44:31] <zeeshan|2> its gotta be a brake
[00:44:35] <ssi> it's probably the brake
[00:44:48] <zeeshan|2> btw instead of giving voltage to the motors
[00:44:49] <ssi> try applying a voltage to it and see what it does
[00:44:50] <zeeshan|2> i checked ohms
[00:44:51] <ssi> start with 24V
[00:45:01] <zeeshan|2> all of the coils read around 2 ohms
[00:45:01] <zeeshan|2> to 1
[00:45:03] <ssi> if that doesn't release it, try 90VDC
[00:45:06] <ssi> sounds about right
[00:45:12] <zeeshan|2> and when i spin them
[00:45:17] <zeeshan|2> i read +3v
[00:45:19] <zeeshan|2> and -3v
[00:45:22] <zeeshan|2> depending on how fast i spin it
[00:45:25] <zeeshan|2> so i guess they work :P
[00:45:30] <ssi> yep
[00:45:34] <ssi> I got mine to respond to velocity commands
[00:45:35] <zeeshan|2> i just cant spin the damn z axis one cause of the brake
[00:45:39] <ssi> had to reverse the hall lines
[00:45:42] <zeeshan|2> nice
[00:45:47] <ssi> it's still acting funny
[00:45:50] <zeeshan|2> whats it doing
[00:45:56] <ssi> when I give it a command, it'll spin fast, and then taper off to slower
[00:46:02] <ssi> I'm just applying voltages manually
[00:46:07] <ssi> maybe it'll behave better when i have it in an actual system
[00:46:09] <zeeshan|2> constant volts?
[00:46:32] <zeeshan|2> er yours is brushless
[00:46:33] <zeeshan|2> nm
[00:46:41] <zeeshan|2> mr fancy pants
[00:46:44] <ssi> yep
[00:46:44] <zeeshan|2> and his non brush motors
[00:46:56] <zeeshan|2> i hate how people call em ac servos
[00:47:04] <zeeshan|2> it's such a misleading name
[00:47:12] <ssi> they are AC
[00:47:17] <zeeshan|2> i understand that
[00:47:33] <zeeshan|2> i just think of induction motors
[00:47:35] <zeeshan|2> when someone says ac
[00:47:38] <zeeshan|2> i guess its just me :P
[00:47:43] <ssi> well stop it :)
[00:48:16] <zeeshan|2> whats the cheapest way to output 240VDC
[00:48:20] <zeeshan|2> 10A
[00:48:30] <zeeshan|2> actually 15A
[00:48:31] <zeeshan|2> not 10
[00:49:36] <ssi> um, get a transformer which steps up or down to 170VAC, rectify and filter
[00:49:50] <zeeshan|2> by filter
[00:49:57] <zeeshan|2> do you mean just capacitor
[00:50:00] <ssi> yes
[00:50:17] <zeeshan|2> this servo amp doesnt mention anything about if it needs super clean power
[00:50:23] <zeeshan|2> ie
[00:50:24] <zeeshan|2> regulated
[00:50:31] <zeeshan|2> it does specify 240 +/-10%
[00:50:37] <zeeshan|2> which is a pretty damn big range
[00:50:52] <ssi> no it doesn't need to be regulated
[00:51:00] <zeeshan|2> btw
[00:51:04] <zeeshan|2> i was looking at the amc servo amps
[00:51:06] <zeeshan|2> theyre so nice
[00:51:08] <zeeshan|2> :-(
[00:51:09] <zeeshan|2> and tiny.
[00:51:10] <ssi> yes, and they're cheap
[00:51:19] <zeeshan|2> ive only need 80VDC models
[00:51:23] <zeeshan|2> nothing in the 160vdc range
[00:51:32] <ssi> how much current do you need?
[00:51:35] <zeeshan|2> http://www.ebay.com/itm/Advanced-Motion-Controls-Brush-Type-PWM-Servo-Amplifier-/181316559854
[00:51:36] <zeeshan|2> like that
[00:51:56] <ssi> yeah 30A8 is a 30A peak, 80VDC amp
[00:52:04] <ssi> you want something that the second number is a 20
[00:52:05] <zeeshan|2> for Z axis 13.6A @ 173V
[00:52:15] <ssi> peak or continuous
[00:52:24] <zeeshan|2> x and y 190V @ 7.%A
[00:52:29] <zeeshan|2> i dont know
[00:52:31] <zeeshan|2> thassts what the name plate says
[00:52:39] <zeeshan|2> im thinking its continuous
[00:52:52] <zeeshan|2> usually name plate values are rms
[00:53:08] <zeeshan|2> unless theyre trying to mislead you :P
[00:53:13] <zeeshan|2> here's a 6hp motor!!!
[00:53:21] <zeeshan|2> that only put outs 2hp on the dyno!
[00:53:29] <zeeshan|2> (air compressor guys) lol
[00:53:33] <ssi> http://www.ebay.com/itm/Advance-Motion-Controls-B25A20ACQ-PWM-Brushless-Servo-Amplifier-30-125VAC-AMC-/311094522791?pt=LH_DefaultDomain_2&hash=item486eadb3a7
[00:53:36] <ssi> I have three of those coming
[00:53:42] <zeeshan|2> wtf dude
[00:53:43] <ssi> bear in mind you can use amc brushless drives for brush motors
[00:53:44] <zeeshan|2> i dont have 300 $
[00:53:45] <ssi> but not the other way around
[00:53:49] <zeeshan|2> oh its brushless
[00:53:50] <ssi> I paid $180 for the three of them
[00:53:56] <ssi> in fact I think the seller has three more
[00:54:09] <zeeshan|2> man thats nice
[00:54:13] <zeeshan|2> it has a builtin supply
[00:54:13] <ssi> http://www.ebay.com/itm/Advanced-Motion-Controls-BE25A20ACG-Brushless-PWM-Analog-Servo-Drive-Amplifier-2-/151440815776?
[00:54:17] <ssi> yep
[00:54:23] <ssi> there ya go
[00:54:28] <ssi> put in an offer for $180 for 3
[00:54:32] <ssi> that's what I did, and they took it
[00:54:42] <zeeshan|2> dude
[00:54:48] <zeeshan|2> i'm almost tempted to do it
[00:54:51] <zeeshan|2> to get a more modern drive
[00:54:56] <ssi> I really think it'll simplify your life
[00:54:59] <zeeshan|2> and cause it's a shit load smaller
[00:55:01] <ssi> run those bitches in torque mode, ditch the tachs
[00:55:14] <zeeshan|2> what is good about torque mode
[00:55:15] <zeeshan|2> over vel mode
[00:55:24] <ssi> the drive doesn't have to be as smart
[00:55:28] <ssi> AND
[00:55:34] <ssi> no tachs to fail, get dirty, etc
[00:55:34] <zeeshan|2> so it's monitoring voltage
[00:55:35] <zeeshan|2> and current
[00:55:42] <zeeshan|2> to make it's feedback loop?
[00:55:43] <ssi> just current really
[00:55:50] <zeeshan|2> well to get torque
[00:55:52] <zeeshan|2> dont you have to have 2 values
[00:55:54] <XXCoder> zee just curious whats your plan with that mill when complete?
[00:56:03] <XXCoder> I doubt it's not dilios since its not lathe
[00:56:04] <zeeshan|2> XXCoder: eat .5" of aluminum in one pass
[00:56:07] <zeeshan|2> at 100ipm
[00:56:11] <ssi> they don't care what the absolute torque number is
[00:56:16] <zeeshan|2> and it's so supplement aluminum blow up dolls
[00:56:17] <ssi> just that it's proportional to the input signal
[00:56:25] <zeeshan|2> to supplement the dildos
[00:56:26] <zeeshan|2> :D
[00:56:31] <XXCoder> ahh cool cool. I guess lots lube needed lol
[00:56:31] <zeeshan|2> *to
[00:56:39] <zeeshan|2> ssi youre the epxert on this
[00:56:41] <zeeshan|2> before i read on this
[00:56:46] <zeeshan|2> can you still run em in tach mode
[00:56:48] <ssi> yep
[00:56:58] <zeeshan|2> can you run em in both torque and vel mode?
[00:56:59] <zeeshan|2> lol
[00:57:19] <zeeshan|2> dual loop
[00:57:31] <ssi> well velocity mode implies torque mode
[00:57:37] <zeeshan|2> oh
[00:57:41] <zeeshan|2> when i say velocity mode
[00:57:43] <ssi> MODES OF OPERATION
[00:57:43] <ssi> Current
[00:57:44] <ssi> Duty Cycle (Open Loop) Velocity
[00:57:46] <zeeshan|2> i mean using a tach gen
[00:57:50] <zeeshan|2> as an input
[00:57:53] <ssi> FEEDBACK SUPPORTED
[00:57:53] <ssi> Halls
[00:57:53] <ssi> Incremental Encoder
[00:57:53] <ssi> Tachometer (±60 VDC)
[00:57:59] <ssi> http://www.a-m-c.com/download/datasheet/be25a20ac.pdf
[00:58:03] <zeeshan|2> okay dude
[00:58:05] <zeeshan|2> for 180
[00:58:07] <ssi> the only thing you need to triple check is that that amp will run a brush motor
[00:58:09] <zeeshan|2> that'll save me building a power supply.
[00:58:16] <ssi> I've used amc brushless drives in the past that would do either
[00:58:20] <ssi> but confirm before you buy
[00:58:25] <zeeshan|2> wtf
[00:58:27] <zeeshan|2> that thing says
[00:58:30] <zeeshan|2> "for parts, not working"
[00:58:31] <zeeshan|2> lol
[00:58:34] <ssi> yeah
[00:58:39] <ssi> because when you plug them in, the fault light comes on
[00:58:40] <ssi> that's normal
[00:58:47] <ssi> chances of them actually being dead is somewhat low
[00:58:59] <zeeshan|2> :-(
[00:59:03] <ssi> they're also $1500 apiece new, so you pays your money and you takes your chances :)
[00:59:21] <ssi> Motors Supported
[00:59:24] <ssi> Single Phase (Brushed, Voice Coil, Inductive Load), Three Phase (Brushless)
[00:59:24] <ssi> bam
[00:59:37] <zeeshan|2> isnt there a chinese driver
[00:59:40] <zeeshan|2> thats cheap
[00:59:42] <zeeshan|2> and new :D
[01:00:01] <ssi> could always get a gecko 203v and run it in step/dir mode on mach3!
[01:00:06] <zeeshan|2> fuck
[01:00:07] <zeeshan|2> that
[01:00:14] <zeeshan|2> ill kill myself before running mach 3
[01:00:17] <zeeshan|2> that non closed loop piece of shit
[01:00:28] <zeeshan|2> i wasn't supposed to type that
[01:00:30] <zeeshan|2> but it came out
[01:00:35] <ssi> eheheh
[01:00:38] <ssi> so look at it like this
[01:00:43] <ssi> for $180 you get those drives
[01:00:56] <ssi> worst case you can make sure they work, and put them back on ebay as "tested/working" for $125 apiece
[01:01:11] <ssi> or more
[01:01:18] <zeeshan|2> only way ill do this
[01:01:22] <zeeshan|2> is if ican get rid of the bosch amplifier
[01:01:24] <zeeshan|2> on ebay first
[01:01:31] <ssi> good luck with that :P
[01:01:34] <zeeshan|2> haha
[01:01:37] <zeeshan|2> otherwise im going to use it!
[01:01:37] <roycroft> and after saying just tonight that there are rarely any good deals on mills here, i see this:
[01:01:44] <ssi> stuff like that sells, but not quickly
[01:01:45] <roycroft> http://eugene.craigslist.org/tls/4715187894.html
[01:01:53] <roycroft> that's still more than i want to spend on a bridgeport clone
[01:01:55] <zeeshan|2> 3500$
[01:01:56] <zeeshan|2> damn
[01:02:03] <ssi> roycroft: not a bad price really
[01:02:04] <roycroft> especially since i bet it comes with no vise or tooling
[01:02:09] <zeeshan|2> or dro
[01:02:15] <ssi> I paid $3k for my enco clone, and it came with no tooling or dro
[01:02:21] <zeeshan|2> new?
[01:02:22] <roycroft> yeah, but if i'm gonna cnc it i don't care if it comes with a dro
[01:02:23] <ssi> it was in really nice shape tho
[01:02:25] <ssi> no, not new
[01:02:35] <zeeshan|2> roycroft
[01:02:36] <ssi> it was an 80s mill
[01:02:39] <zeeshan|2> why spend 3500
[01:02:43] <zeeshan|2> on a r8 spindle
[01:02:50] <zeeshan|2> thats the main reason i got rid of my manual mill
[01:02:52] <zeeshan|2> r8 nonsense
[01:02:54] <roycroft> i want to spend $2k on a bridgeport clone
[01:02:58] <roycroft> or bridgeport
[01:03:06] <zeeshan|2> youre better of buying a column mill
[01:03:07] <zeeshan|2> from china
[01:03:08] <zeeshan|2> for 2k
[01:03:12] <ssi> I disagree
[01:03:30] <ssi> roycroft: although to put it in perspective
[01:03:33] <roycroft> i want a knee mill
[01:03:35] <ssi> $3500 is what I paid for my VMC
[01:03:48] <ssi> but they sell a lot cheaper because they're harder to deal with
[01:03:53] <roycroft> i have a dovetail column mill-drill that is getting me by
[01:04:13] <roycroft> but i need greater capacity
[01:04:35] <roycroft> 9x42 would be fine
[01:04:44] <roycroft> i could be happy with that for a long time
[01:05:01] <ssi> http://atlanta.craigslist.org/atl/tls/4690883465.html
[01:05:03] <ssi> dafux
[01:05:18] <zeeshan|2> nice mill bro
[01:05:20] <zeeshan|2> drill chuckl
[01:05:27] <roycroft> i'm not going to atlanta for a mill
[01:05:32] <roycroft> especially not that one
[01:06:54] <ssi> really/!
[01:07:18] <roycroft> i just found it curious that the very day i complain about not finding any good mill deals locally one shows up right here in town
[01:08:35] <roycroft> grizzly's 9x42 with x power feed is $5300
[01:09:05] <zeeshan|2> ssi
[01:09:06] <roycroft> and theirs is single-phase, which is easier for me to deal with
[01:09:10] <zeeshan|2> how amny of those amc drives did you buy
[01:09:21] <ssi> three of those BE25A20ACs
[01:09:25] <roycroft> and there are no mountains between here and bellingham, so i could haul that on my pickup
[01:09:26] <ssi> two SE10A20ACs
[01:09:30] <zeeshan|2> lemme know if they're blown up
[01:09:33] <zeeshan|2> if theyre not
[01:09:34] <ssi> I will
[01:09:34] <zeeshan|2> ill order
[01:09:34] <zeeshan|2> :D
[01:09:36] <ssi> I'll have them monday
[01:09:44] <roycroft> they want $395 to ship it
[01:09:45] <zeeshan|2> the problem with modern drives is
[01:09:50] <zeeshan|2> fixing them is impossible for a noob like me
[01:09:53] <zeeshan|2> with oldschool ones
[01:09:56] <roycroft> i bet i could go pick it up for about $100 in fuel
[01:09:57] <zeeshan|2> i can prolly trace it
[01:10:03] <zeeshan|2> cause the components are bigger and easier to replace
[01:10:08] <ssi> dude with your electronics skills I don't really think you should be inside either :P
[01:10:20] <zeeshan|2> ssi i'm careful
[01:10:25] <zeeshan|2> i'm _ok_ with some electronics
[01:10:28] <zeeshan|2> but shitty with micro
[01:10:33] <ssi> the modern ones are a lot more robust, especially with regard to capacitors
[01:10:41] <zeeshan|2> well i can change a capaciator
[01:10:42] <ssi> that's usually what dies in the old shit
[01:10:44] <zeeshan|2> that blows up
[01:10:58] <ssi> point is, you shouldn't HAVE To repair the modern drives
[01:11:08] <zeeshan|2> well everything has a life..
[01:11:34] <zeeshan|2> i just like the amc drives caus theyre compact
[01:11:38] <zeeshan|2> and have a built in supply
[01:11:43] <zeeshan|2> which makes them super desirable
[01:11:53] <ssi> also if you blow up an amc drive, you can get another one for sane money
[01:11:58] <ssi> how much will it cost you to replace that bosch drive?
[01:12:04] <zeeshan|2> well thats the thing, i wouldnt replace it
[01:12:07] <zeeshan|2> if it blows up
[01:12:09] <zeeshan|2> ill fix what blew up
[01:12:16] <zeeshan|2> (granted it'd take proly 2 weeks)
[01:12:17] <zeeshan|2> haha
[01:12:25] <zeeshan|2> hopefully it leaves a black mark!
[01:12:28] <zeeshan|2> or something obvious
[01:13:20] <ssi> well I'm going the hell to boed
[01:13:21] <ssi> bed
[01:14:11] <zeeshan|2> cu
[01:22:15] <zeeshan|2> rfirefox
[01:22:17] <zeeshan|2> er
[01:32:34] <zeeshan|2> i wonder why i am having a hard time finding a 240vac to 170vac transformer
[01:32:39] <zeeshan|2> or even 120vac to 170
[01:33:24] <asah> what are you going to use the 170 ac for?
[01:33:33] <zeeshan|2> to rectify to 240vdc
[01:33:53] <asah> ah.
[01:34:04] <asah> for vfd input?
[01:34:12] <zeeshan|2> for servo aamplifier power supply
[01:35:50] <asah> can’t live with 170vdc?
[01:35:55] <zeeshan|2> no
[01:35:59] <asah> what motor are you driving?
[01:36:00] <zeeshan|2> the specs say 240vdc +/-10%
[01:36:10] <zeeshan|2> its not just a servo amplifier
[01:36:12] <zeeshan|2> its a big module
[01:36:16] <zeeshan|2> that has a bunch of servo amplifiers
[01:36:42] <zeeshan|2> the way it was powered before
[01:36:45] <asah> ah…
[01:36:47] <zeeshan|2> was using 3 phase nput
[01:36:50] <zeeshan|2> which i dont have =/
[01:37:10] <asah> 3phase 208 ?
[01:37:36] <asah> you are in canada though right?
[01:37:36] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15536061122/
[01:37:43] <zeeshan|2> none of us could figure it out
[01:37:50] <zeeshan|2> by it says 3x96/165V AC
[01:38:08] <zeeshan|2> no idea why its 96/165VAC
[01:38:12] <zeeshan|2> yes im in canada
[01:38:26] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15346424017/
[01:38:29] <zeeshan|2> this is the current transformer
[01:38:34] <zeeshan|2> thats powering that module
[01:38:37] <archivist> if brave, build a switchmode power supply
[01:38:40] <zeeshan|2> archivist: no
[01:38:43] <Jymmm> Web whiteboard...
https://awwapp.com/draw.html#6c51a5ff
[01:38:45] <zeeshan|2> i'm not good with microelectronics
[01:38:52] <zeeshan|2> i can handle a transformer and rectifiers and cap though
[01:39:01] <archivist> it would not be micro!
[01:39:21] <zeeshan|2> according to this input is 220v 7A
[01:39:26] <zeeshan|2> and its putting out 8.77A
[01:39:29] <archivist> you might be able to buy one
[01:39:52] <zeeshan|2> archivist: ive been looking
[01:39:53] <zeeshan|2> i cant find
[01:40:09] <zeeshan|2> i dont want to run a switched mode power supply either
[01:40:15] <zeeshan|2> after my 72vdc power supply blew up on me
[01:40:16] <zeeshan|2> lol
[01:40:21] <archivist> more efficient
[01:40:22] <zeeshan|2> toriod for the win!
[01:40:24] <zeeshan|2> it is
[01:40:28] <zeeshan|2> but i dont mind if its less efficient
[01:40:46] <asah> what is wall power for you in canada?
[01:40:53] <archivist> just go to a transformer company and they can wind one
[01:40:55] <zeeshan|2> i have access to 120vac and 240vac
[01:42:06] <asah> well isn’t that transformer doing what you want? primary is 220VAC and secondary is 165VAC? rectify that and you get 240VDC no?
[01:42:13] <zeeshan|2> asah it is
[01:42:15] <zeeshan|2> but its 3 phase
[01:42:19] <zeeshan|2> i need single phase
[01:42:27] <zeeshan|2> i need that exact transformer in single phase
[01:42:55] <asah> I took one phase of my wall power and put it through my 3 phase transformer and got single phase out.
[01:43:11] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15539676825/
[01:43:14] <zeeshan|2> thats the top of that transformer
[01:43:31] <zeeshan|2> asah how?
[01:43:33] <asah> I checked the wiring internally, and it worked out. This advice is clearly dangerous… ask your electrician. =)
[01:43:42] <zeeshan|2> well
[01:44:13] <zeeshan|2> i should prolly check out the windings are
[01:44:14] <asah> In my case I am using the 240VAC -> 380VAC tranformer that came with my mill.
[01:44:28] <zeeshan|2> so you plugged in 1 phase
[01:44:30] <asah> and I have 240v Single phase .
[01:44:38] <zeeshan|2> and it actually output 1 phase 380?
[01:44:39] <asah> from the wall.
[01:44:44] <asah> yes.
[01:44:51] <zeeshan|2> the other 2 terminals were empty?
[01:45:18] <zeeshan|2> you know
[01:45:23] <asah> I am using two of the terminals.
[01:45:24] <zeeshan|2> theres no harm in just hooking up single phase in there
[01:45:27] <zeeshan|2> sorry yes 2
[01:45:28] <zeeshan|2> not 1.
[01:45:33] <zeeshan|2> ill hook up 2
[01:45:36] <zeeshan|2> and see what uvw output
[01:45:41] <zeeshan|2> if its the correct ou tput, so be it :)
[01:45:48] <asah> check winding resistance.
[01:45:50] <zeeshan|2> but im pretty sure its a bad idea
[01:46:00] <asah> make sure that across the phases is consistant.
[01:46:09] <zeeshan|2> because you'll be putting sqrt(3) more power
[01:46:12] <zeeshan|2> through that transformer
[01:46:15] <zeeshan|2> cause of single phase
[01:46:26] <archivist> through one winding
[01:46:47] <archivist> therefore that part of the core may saturate
[01:46:48] <zeeshan|2> ill need to read my book on power transformers
[01:46:51] <asah> but I am also drawing way less power than it was orignally speced for.
[01:47:01] <zeeshan|2> asah that makes sense
[01:47:03] <asah> as this is only now powering my spindle.
[01:47:08] <asah> and my hydros
[01:47:28] <asah> and the axes motors are all being driven 110
[01:47:38] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15346424017/
[01:47:43] <zeeshan|2> if you look at the transformer closesly
[01:47:48] <asah> so… don’t quote me on it, but it certainly puts it out.
[01:47:48] <zeeshan|2> you'll see its got 3 distinct cores
[01:47:58] <zeeshan|2> its like that for a reason
[01:48:01] <asah> yes,
[01:48:07] <zeeshan|2> usually one is for each phase
[01:48:15] <zeeshan|2> so if you're only plugging in l1 and l2
[01:48:19] <zeeshan|2> you're only using 2 of the cores
[01:48:33] <zeeshan|2> and the power that was supposed go through the 3rd core
[01:48:36] <zeeshan|2> is now being split between those 2 cores
[01:48:41] <zeeshan|2> so they'll technically run hotter
[01:48:46] <zeeshan|2> (if i understand it right)
[01:49:11] <asah> what is that mill?
[01:49:16] <zeeshan|2> mikron wf21c
[01:49:19] <archivist> as a person who worked at a transformer co said, there is no such thing as three phase transformer, its three single phases on one core
[01:50:12] <asah> that think is like the brother of my mill.
[01:50:18] <zeeshan|2> what mill?
[01:50:21] <asah> mine is a maho 400e
[01:50:24] <archivist> note you are also asking some of the diodes and capacitors to work harder
[01:50:28] <asah> same green.
[01:50:34] <asah> same layout. =)
[01:50:37] <zeeshan|2> archivist: which diodes?
[01:50:44] <zeeshan|2> asah
[01:50:46] <archivist> rectifiers
[01:50:46] <zeeshan|2> it's the exact same mill
[01:50:47] <zeeshan|2> :P
[01:51:08] <zeeshan|2> seriously its almos thte same mill
[01:51:13] <zeeshan|2> i think they were made at the same place
[01:51:19] <zeeshan|2> http://mhpdocs.logotech.de/1053/1053-002766-10012008150830958.jpg
[01:51:23] <zeeshan|2> mine is like the mah 500
[01:51:34] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15540544082/
[01:51:37] <asah> http://www.practicalmachinist.com/vb/dmg-mori-gildemeister-maho-cnc/maho-mh400e-retrofit-linuxcnc-277268/
[01:51:43] <Tecan> zeeshan are you a internet ninja ?
[01:51:51] <zeeshan|2> tecan why do you say that
[01:52:02] <Tecan> you must take like microsleeps
[01:52:13] <zeeshan|2> i sleep 2 hours a day
[01:52:13] <Tecan> your very www nimble
[01:52:16] <zeeshan|2> :-)
[01:52:30] <zeeshan|2> asah nice machine
[01:52:42] <zeeshan|2> what kind of servo amps are you using
[01:52:46] <zeeshan|2> bosch?
[01:52:53] * Tecan finishes up a coffee and starts on a rockstar
[01:52:56] <asah> nope… mesa 8i20 !
[01:53:11] <asah> that link is my build thread.
[01:53:19] <asah> need to update it.
[01:53:43] <asah> finally got my z axis mounting plate…. need to mount that and I am golden for all three axes!
[01:53:51] <asah> I replaced all my servos with fanuc red caps.
[01:54:02] <zeeshan|2> hey
[01:54:10] <zeeshan|2> youre using those interpolators
[01:54:11] <zeeshan|2> exe
[01:54:15] <asah> yep… same
[01:54:23] <zeeshan|2> whered you get those
[01:54:29] <zeeshan|2> came with your machine?
[01:54:37] <asah> the interpolators were part of the original machine.
[01:54:46] <zeeshan|2> mines not as pretty as yours
[01:54:47] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15536189301/
[01:54:48] <asah> they all came on tha tboard (in the photos on the site)
[01:54:51] <zeeshan|2> i know where the inputs are
[01:54:54] <zeeshan|2> but i dont know where the output is
[01:54:59] <zeeshan|2> or where it gets current
[01:55:04] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15538891175/in/photostream/
[01:55:13] <asah> that doesn’t look like my interp board.
[01:55:14] <zeeshan|2> thats why im just going to buy another interpolator card
[01:55:23] <zeeshan|2> its similar
[01:55:25] <zeeshan|2> in what chips it uses :P
[01:55:28] <asah> ah.. ok.
[01:55:43] <asah> I know mesa is building a solution for those boards.
[01:56:02] <asah> not sure when they are releasing it. PCW want to chime in. =)
[01:56:04] <zeeshan|2> did your machine come with dc brush motors?
[01:56:10] <zeeshan|2> siemens?
[01:56:25] <asah> which would be really nice. otherwise you can get those exe heidenhains off of ebay for cheap.
[01:56:33] <asah> it was an indramat system..
[01:56:40] <asah> DC brushed.
[01:56:54] <zeeshan|2> hm
[01:57:00] <zeeshan|2> maybe i can use the 8i20 too
[01:57:14] <asah> are you changing servos?
[01:57:18] <zeeshan|2> i dont want to
[01:57:20] <zeeshan|2> only reason i will have to
[01:57:24] <zeeshan|2> is cause i dont have 240VDC input
[01:57:28] <asah> its a pain!
[01:57:29] <zeeshan|2> or a way to power the board
[01:57:30] <zeeshan|2> haha
[01:57:43] <asah> I had to remanufacture mounting brackets for all the axes.
[01:57:59] <asah> which is fine if you have another mill handy.
[01:58:03] <asah> but I don’t
[01:58:05] <zeeshan|2> thats not bad :P
[01:58:14] <zeeshan|2> http://i.imgur.com/A0ZB0HS.jpg
[01:58:22] <zeeshan|2> my servo amplifiers are on the top right there
[01:58:24] <zeeshan|2> its a big ass box
[01:58:33] <asah> nice clean cab.
[01:58:47] <zeeshan|2> honestly i think its overcomplicated
[01:58:49] <zeeshan|2> for no good reason
[01:58:56] <zeeshan|2> i want to keep it simple
[01:59:02] <zeeshan|2> servos, limit switches
[01:59:05] <zeeshan|2> vfd
[01:59:08] <asah> https://www.dropbox.com/s/mgptg1nstb4j26k/maho_rewire.JPG?dl=0
[01:59:10] <zeeshan|2> scales, done
[01:59:17] <zeeshan|2> holy cow man
[01:59:17] <zeeshan|2> haha
[01:59:17] <asah> =)
[01:59:28] <asah> that was a fun day.
[01:59:37] <asah> ripped it all out after that!
[01:59:46] <zeeshan|2> how many contactors do you have now?
[01:59:47] <zeeshan|2> like 3?
[02:00:05] <asah> 2 or 3.
[02:00:12] <zeeshan|2> dude my thing has a damn plc in it
[02:00:17] <zeeshan|2> what it's doing, i have no clue.
[02:00:19] <zeeshan|2> lol
[02:00:24] <zeeshan|2> all the limit switches go into it
[02:00:34] <zeeshan|2> and a couple of the push buttons for jogging the axes
[02:00:44] <asah> I ripped it out, and used the chassis to hold my 8i20s and all my mesa boards.
[02:00:52] <asah> there on the right of the pic.
[02:00:54] <zeeshan|2> at least your cabinet is compact
[02:00:55] <zeeshan|2> mine is too big
[02:00:57] <zeeshan|2> to keep.
[02:00:59] <zeeshan|2> takes too much space
[02:01:11] <asah> I had dreams of ripping out the whole cab...
[02:01:14] <zeeshan|2> http://i.imgur.com/js7pUBj.jpg
[02:01:18] <zeeshan|2> you can see it in that pic
[02:01:21] <asah> but talked myself out of it.
[02:01:21] <zeeshan|2> so dont complain! :P
[02:01:38] <asah> ah.. ok. thats big.
[02:01:50] <zeeshan|2> its bigger than the machine!
[02:01:50] <zeeshan|2> haha
[02:02:05] <zeeshan|2> i'd be happy with your size cabinet
[02:02:10] <zeeshan|2> yours looks like a 36"x36"
[02:02:12] <asah> =) I am so excited to get that third axis going!
[02:02:19] <zeeshan|2> third axis = Z?
[02:02:40] <asah> yeah, thats about the size.. yes, x and y have been fine for weeks.
[02:02:50] <asah> z motor didn’t fit once I pulled the old one.
[02:03:06] <zeeshan|2> why not?
[02:03:10] <asah> back to the drawing board on the plate, mill down the fanuc motor… etc.
[02:03:15] <zeeshan|2> oh
[02:03:16] <zeeshan|2> you replaced motors
[02:03:22] <zeeshan|2> was it burned out?
[02:03:24] <asah> hard to measure when you have the motor in the way...
[02:03:29] <asah> nope. they were DC
[02:03:43] <asah> and I have single phase power from the walls. same problem as you. =)
[02:04:04] <zeeshan|2> ah
[02:04:10] <asah> do you have hydraulic tool release?
[02:04:13] <zeeshan|2> yes
[02:04:16] <zeeshan|2> i cant believe
[02:04:21] <zeeshan|2> they put a whole hydraulic pump and reservoir
[02:04:26] <zeeshan|2> just to release the tool lol
[02:04:32] <asah> =) same here.
[02:04:43] <zeeshan|2> i havent looked at it in detail
[02:04:48] <asah> I can’t get that motor to release yet.
[02:04:48] <zeeshan|2> how much HP was the motor on the hydraulic pump?
[02:04:57] <asah> pretty small.
[02:05:02] <zeeshan|2> okay then i guess i can vfd it
[02:05:04] <asah> its a compact power pack.
[02:05:17] <asah> HAWE FP12
[02:05:30] <asah> I still need to hook it up to the larger vfd I have.
[02:05:44] <asah> it runs on 380 3 phase. so I need the vfd.
[02:05:51] <zeeshan|2> ah
[02:05:55] <zeeshan|2> see mine is all 240vac
[02:05:59] <asah> but the one I got for it is undersized it seems.
[02:06:02] <zeeshan|2> so its just a matter of hooking up the vfd
[02:06:04] <zeeshan|2> no need for transformer
[02:06:06] <asah> nice.
[02:06:19] <zeeshan|2> i got a question for you
[02:06:27] <zeeshan|2> can you spin your spindle by hand (is it iso40?)
[02:06:27] <asah> I lose a chunk of floor space to the large transformer. =)
[02:06:48] <zeeshan|2> i tried to rotate my spindle
[02:06:51] <asah> I have a big gearbox in the way. and the spindle motor has a brake.
[02:06:52] <zeeshan|2> but it doesnt spin by hand
[02:06:56] <zeeshan|2> OH
[02:07:00] <asah> probably spindle motor brake.
[02:07:17] <zeeshan|2> that makes sense :)
[02:07:29] <asah> it is CAT40
[02:07:45] <zeeshan|2> REALLY?
[02:07:51] <zeeshan|2> for some reason the manuals say iso40 for me
[02:07:56] <zeeshan|2> if its cat40, that would be sweet
[02:08:03] <asah> mine is cat 40. =)
[02:08:04] <zeeshan|2> so your tools have a pull stud?
[02:08:06] <asah> not sure about yours. =)
[02:08:07] <asah> yes.
[02:08:13] <zeeshan|2> okay see i dont know what mine has
[02:08:17] <zeeshan|2> i didnt get any tools with it :(
[02:08:20] <asah> =)
[02:08:37] <zeeshan|2> i hope its cat40
[02:08:40] <zeeshan|2> we almost have similar machines
[02:08:45] <asah> sounds like it!
[02:09:21] <asah> I wish my week wasn’t so busy at work so I could get that motor mounted.
[02:10:08] <Deejay> moin
[07:05:38] <miss0r> I am having a hard time designing an involote rack(linear gear). I simply can't find any plugin to create such. do you guys know of any such plugin for google sketchup?
[07:20:10] <archivist> it is a plain 20 degree flat side repeated
[07:20:52] <archivist> to the extent it is easier to just cut using gcode, no drawing needed
[07:23:35] <archivist> just draw one tooth and repeat at the pitch
[07:26:39] <MacGalempsy> good morning
[07:26:51] <archivist> buy a rack form cutter and loop the cut(ocode while loop) at the pitch to make
[07:32:37] <Loetmichel> i am jut gri nding credits to upgrade to the 1.6 million reactor and thrusters
[07:32:53] <Loetmichel> because the rest of the parts is alread y t myx upgrade ;-O)
[07:33:11] <Loetmichel> oh, sorry, wrhong shannel
[08:00:46] <jdh> I see.
[08:02:20] <Jymmm> Loetmichel: "whore channel" ?!
[08:03:31] <Loetmichel> wrong
[08:03:37] <Jymmm> ah
[08:03:58] <Loetmichel> should have gone to #elite-dangerous on quakenet
[08:13:04] <jthornton> is google sketchup a vector drawing tool?
[08:14:21] <jdh> low-budget 3d
[08:14:21] <Jymmm> jthornton: 3D vector drawing
[08:14:55] <jdh> it's art, not engineering afaict
[08:15:49] <Jymmm> Eh, more functional athan art or engineering.
[08:16:30] <Jymmm> Glorified cocktail napkin?
[08:17:25] <jdh> the price is good.
[08:17:43] <Jymmm> Which? The free or paid version?
[08:18:00] <jdh> free. paid only has more export options doesn't it?
[08:18:31] <Jymmm> No idea. I rarely use it.
[08:21:38] <jdh> I signed up for a class at the local CC for 3d-stuff. Was supposed to use inventor but the instructor used sketchup since it was free and readily available.
[08:22:14] <Jymmm> Heh, so is Blender =)
[08:30:27] <lair82> Good Morning Gentlemen, does anybody know off hand what the hole diameter is, of the mounting holes in the Mesa boards?
[08:34:24] * cpresser would guess 3mm
[08:34:52] <jdh> it is in the docs
[08:34:55] <_methods> isn't it on the docs
[08:35:01] <_methods> ^^
[08:35:40] <archivist> is the vernier lost again
[08:42:30] <pcw_home> hole size is 1/8", suitable for 3 mm or 4-40 screws
[08:44:31] <pcw_home> or just buy the DIN rail adapters, they come with hardware
[09:01:53] <lair82> Thanks, I am laying out my backplane in autocad for the mill I am working on, and couldn't remember, we have always used 3mm standoffs, but they are a dollar more a piece versus 6/32 standoffs, which I wanted to use this time.
[09:15:25] <jdh> heh, I assumed 6-32 with mine. Doesn't work!
[09:16:12] <pcw_home> we use 3mm for the DIN rail adapters pretty sure we dont pay much for the spacers
[09:16:54] <pcw_home> but probably bought 10000 or so
[09:18:15] <cradek> if you want to bewilder anyone who works on it in the future, you could use 5-40
[09:18:56] <cradek> (5-40 is a useful size and I wish it was more common)
[09:19:53] <pcw_home> Ahh yes used in the Cox .049 Prop attachment
[09:21:27] <skunkworks_> wow - blast from the past...
[09:21:45] <jdh> TD 051
[09:35:41] <skunkworks_> I spurged and bought one of these..
http://www.ebay.com/itm/Supereyes-B005-200X-Handheld-Digital-Microscope-Otoscope-Magnifier-w-LED-tripod-/231286789433?ssPageName=ADME:L:OU:US:1120
[09:35:51] <skunkworks_> it is actually suprisingly good.
[09:36:21] <skunkworks_> it focuses from touching to infinity.
[09:37:36] <cradek> does it show up as a video device in debian?
[09:42:42] <tjtr33> had to look up otoscope, thats the thing doctors put in your ear and peer into
[09:48:36] <archivist> I think I have seen similar with a better res camera
[09:50:28] <tjtr33> a lot on the store site, 500x, wireless models, opticsto check sides of small bores... good find (does it show up as vide device in debian?)
[09:51:13] <archivist> http://www.ebay.co.uk/itm/171190008984
[09:51:17] <archivist> 2mp
[09:53:51] <_methods> https://www.youtube.com/watch?v=UlYClniDFkM
[10:03:19] <CaptHindsight> wtf, "How to calculate a digital microscope's magnification" in the ebay link for the Supereyes
[10:04:28] <CaptHindsight> the formula doesn't factor in how far you sit from the screen :)
[10:05:15] <archivist> only a 640x480 camera too
[10:12:35] <CaptHindsight> supereyes image, 100um gap sobel edge detect
http://imagebin.ca/v/1dpISeLUKr32
[10:16:35] <ssi> morn
[10:17:27] <CaptHindsight> the dust particles on the caliper appear to be in the 10-25um dia range
[10:18:21] <ssi> CaptHindsight: do you know where I can get a small scale to lay in the view of a 10x or 20x microscope in order to measure small features?
[10:20:06] <archivist> I have cross hairs in my microscopes and measure the move of scope or item move
[10:20:33] <ssi> I don't really have the means to do it that way
[10:20:47] <ssi> it's just a regular stereo soldering microscope
[10:20:56] <archivist> you do, put item on mill and jog
[10:20:57] <ssi> I want to be able to confirm the size of the apertures I'm cutting in a pcb stencil
[10:21:07] <jdh> http://www.tedpella.com/histo_html/2280-10.htm
[10:21:32] <ssi> jdh: thx
[10:22:05] <ssi> wow spendy :)
[10:22:21] <cradek> I like these for general use:
http://www.use-enco.com/CGI/INSRIT?PMAKA=319-9581
[10:22:27] <jdh> $5 ones on ebay
[10:22:30] <CaptHindsight> https://www.robotics.org.za/image/data/PCB%20Software/ruler_hd02.jpg maybe something like this?
[10:22:43] <cradek> the 1/10 and 1/100 inch is nice (fractions are stupid) and 1/2 mm is quite readable too
[10:23:10] <ssi> cradek: I like those for general use too, but I need something graduated at least .001" for microscope use for what I want to do
[10:23:43] <ssi> CaptHindsight: haha I actually have one of those, but it's not fine enough for what I want
[10:23:48] <archivist> I have micrometers moving the stage or scope
[10:23:50] <cradek> ooh, very different world then, I have no idea
[10:23:54] <ssi> what jdh linked is what I want
[10:24:04] <jdh> http://www.ebay.com/itm/191374271051
[10:24:33] <CaptHindsight> ssi: found it ^^
[10:24:33] <ssi> :D there we go
[10:25:52] <archivist> I do recommend eye piece angle hair for thread work
[10:25:53] <ssi> ahaha ok I love this
[10:26:05] <ssi> jdh: that ebay auction looked like something familiar
[10:26:07] <ssi> the case it comes in
[10:26:19] <ssi> something like that came with my scope.... I always just assumed it was a couple slides
[10:26:24] <ssi> but nope, it's exactly that little scale
[10:27:08] <jdh> heh
[10:27:23] <ssi> https://pbs.twimg.com/media/Bz_zMbYIgAABb4K.jpg:large
[10:30:42] <CaptHindsight> http://imagebin.ca/v/1dpNxHOm4yJA that Adafruit pcb ruler with the Logitech C270
[10:31:29] <jdh> what are they cut with?
[10:32:27] <CaptHindsight> jdh: the pcb traces are printed copper
[10:32:46] <jdh> oh, the lines look cut.
[10:33:03] <CaptHindsight> the dust probably adds to that effect
[10:34:23] <skunkworks_> cradek, it does in ubuntu 14.04. I have not tried wheezy yet. I want to get a wheezy system setup with opencv to see what issues there are.
[10:34:41] <jdh> that's a pretty cool ruler
[10:36:05] <CaptHindsight> that 6 mill trace on the pcb
http://imagebin.ca/v/1dpPmcB5nCo2
[10:36:26] <tjtr33> you're not really a machine geek unless you keep a 6" scale in your shirt pocket
[10:36:26] <skunkworks_> CaptHindsight, I was looking at a small ant with it.. pretty cool.
[10:37:02] <ssi> tjtr33: airplane builders do the same thing :P
[10:37:27] <ssi> I have dozens of those 6" scales
[10:38:58] <CaptHindsight> the photoetching services usually give out scales made into their metal business cards at trades shows
[10:39:18] <CaptHindsight> they actually come in handy
[10:40:41] <tjtr33> skunkworks__, thx
[10:50:07] <ssi> wow, these got real expensive
[10:50:07] <ssi> http://www.amazon.com/Intel-Dual-Core-Mini-ITX-Motherboard-BOXD525MW/dp/B0041RSC94/ref=sr_1_2?ie=UTF8&qid=1413387031&sr=8-2&keywords=d525
[10:50:28] <koss> lol!
[10:53:54] <ssi> rgh I hate how vendors play games with shipping
[10:54:11] <ssi> putting in shipping info three or four days before they ship it to make it look like its the carrier that's screwing me over
[10:54:13] <ReadError> my 525 is goin strong still
[10:54:30] <ssi> ReadError: I was thinking about grabbing one for the vmc build, but I can't find any for a reasonable price
[10:54:49] <pcw_home> why not a newer MB
[10:54:52] <ReadError> any other low latency replacements out?
[10:55:08] <ssi> pcw_home: I'm certainly open to suggestion :)
[10:55:12] <ssi> I just know everyone talks about the d525
[10:55:26] <ssi> I normally use dell optiplex desktops off-lease, but I want something smaller for this machine I think
[10:55:54] <pcw_home> http://www.newegg.com/Product/Product.aspx?Item=N82E16813138412
[10:55:56] <pcw_home> is decent
[10:56:13] <ssi> nice
[10:56:51] <ssi> aw too bad there's no prime same day shipping options for it
[10:57:18] <koss> http://www.amazon.com/exec/obidos/ASIN/B00J2CCCJE/fpv-20/
[10:58:00] <ssi> the biostar would be better for me, as I only have pci 5i25s on hand
[10:58:24] <pcw_home> Oops Biostar only has PCIE
[10:58:36] <ssi> oh it is isn't it
[10:58:36] <CaptHindsight> it's harder to find something not low latency with the new RTAI tree
[10:58:55] <CaptHindsight> but not much Intel has been tested
[11:00:05] <CaptHindsight> ssi: what form factor do you need? mini-itx or?
[11:00:18] <ssi> it's not critical, but mini-itx would be nice
[11:00:27] <ssi> I was considering building it into the operator pendant box that I want to make
[11:00:28] <pcw_home> Ive spent much time with Preemt-RT and Ethernet lately
[11:00:29] <pcw_home> Note that the latency test is mostly a fiction
[11:00:49] <ssi> how's that
[11:01:43] <pcw_home> take your D525 and plot some time for functions, you will see up to 200 usec delays
[11:04:02] <pcw_home> despite good latency test numbers
[11:04:04] <pcw_home> try the same test on a fast machine
[11:04:05] <pcw_home> (with perhaps worse latency test figures than the D525)
[11:04:07] <pcw_home> and notice much smaller delay spikes
[11:04:12] <ssi> gotcha
[11:05:02] <pcw_home> a D525 barely runs a 1 KHz servo loop without occasional real time errors
[11:05:04] <pcw_home> a fast machine can do 6 or more
[11:05:42] <ssi> and where does that biostar fit in there?
[11:06:38] <pcw_home> BIostar has good latency test values and runs decent servo thread rates (seems about twice as fast as the D525s)
[11:06:56] <ssi> what about the D2500?
[11:07:04] <ssi> I found a D2500 board that I can have today if I ask the amazon gods nicely
[11:07:23] <vapula> x86 just sucks at closely controlling realtime processes. start with disabling hyperthreading to get better results
[11:08:19] <CaptHindsight> heh
[11:08:23] <pcw_home> Its not really X86, main troubles seem to be interference from Video drivers
[11:08:44] <pcw_home> no video, troubles go away
[11:09:20] <vapula> that's either bandwidth or interrupt prioritization that's at fault then
[11:09:28] <ssi> video seems to be the problem with this d2500 board too... pass
[11:09:49] <pcw_home> or hardware blocking by DMA
[11:09:51] <CaptHindsight> vapula: you might find this interesting
https://www.osadl.org/Continuous-latency-monitoring.qa-farm-monitoring.0.html
[11:10:36] <vapula> pcw_home: that's the same as bandwidth really
[11:11:34] <pcw_home> well not exactly, you can have plenty of bandwidth but a particular hardware channel blocked
[11:11:34] <CaptHindsight> ssi: what wrong with throwing a few *duinos and a couple RPi's at it? :p
[11:12:20] <vapula> pcw_home: then the northbridge is crap, if it can't handle bounded time memory transactions
[11:12:23] <ssi> seems reasonable
[11:12:53] <zeeshan|2> Hi
[11:13:00] <zeeshan|2> i've come to eat all your brains
[11:13:02] <zeeshan|2> again!
[11:13:05] <ssi> onoes
[11:13:08] <zeeshan|2> haha
[11:13:11] <pcw_home> Not a problem with memory typically
[11:13:12] <vapula> but granted, the Intel memory architecture is awful enough that atomic operations alone can take more than 5k cycles if there i contention between cores
[11:13:26] <vapula> not a problem with memory, but with memory controller
[11:13:27] <CaptHindsight> what has evolved with the kernel and X is that more and more video is now in the kernel and X
[11:13:31] <zeeshan|2> pcw_home: that link you gave me
[11:13:36] <pcw_home> thats not an issue
[11:13:40] <zeeshan|2> i offered the guy 60 bux instead of 90 bux for those 3 boards
[11:13:42] <zeeshan|2> and he accepted :D
[11:13:49] <jdh> what boards?
[11:13:57] <pcw_home> The manual for those is online
[11:14:11] <ssi> for t he interpolator?
[11:14:15] <pcw_home> So thats a deal
[11:14:21] <zeeshan|2> jdh interpolators
[11:14:21] <zeeshan|2> yes
[11:14:47] <vapula> CaptHindsight: hmm, that link has an inconsistent rack/slot # and description table, the worst score isn't described
[11:14:59] <vapula> (rack6slot8)
[11:15:10] <zeeshan|2> pcw_home: what mesa board will i need to wire those ttl signals from the interpolator board
[11:15:14] <pcw_home> Memory access is not an issue AFAIKT
[11:15:29] <CaptHindsight> vapula: you can dig through it, lots there you might find
[11:15:40] <lair82> I still have 4 Gigabyte MB's on the shelf for sale, $30 a piece and $15/ea for shipping.
[11:15:43] <vapula> k
[11:16:06] <lair82> Model GA-D525TUD
[11:16:29] <CaptHindsight> https://www.osadl.org/Latency-plots.latency-plots.0.html
[11:16:41] <ssi> lair82: where are you?
[11:16:50] <lair82> Michigan
[11:16:50] <CaptHindsight> https://www.osadl.org/Latency-plot-of-system-in-rack-6-slot.qa-latencyplot-r6s8.0.html?latencies=&showno=&slider=0
[11:17:03] <lair82> ssi where are you?
[11:17:09] <ssi> atlanta
[11:17:15] <zeeshan|2> lovers
[11:17:17] <zeeshan|2> you should meet up
[11:18:21] <lair82> That shipping is for inside the US, USPS priority flat rate box. I can actually get 2 boards in one box, so if you order 2 its still only $15.00
[11:18:55] <pcw_home> for entertainment value, halscope motion-controller.time and move the mouse around...
[11:19:18] <lair82> My boss can send you a paypal invoice for payment, then we will ship that same day if possible.
[11:19:42] <ssi> hm
[11:19:50] <ssi> you have any of those pico psus?
[11:20:30] <zeeshan|2> is this a typo on the tag
[11:20:31] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15542973915/
[11:20:39] <zeeshan|2> for the 3x96/165 it says "60A" for rating
[11:20:58] <zeeshan|2> but on the transformer its 8.77A
[11:20:59] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15346424017/
[11:21:33] <zeeshan|2> tis makes no sense! :P
[11:22:17] <zeeshan|2> which leads me to my second question, i've been trying to figure out how to power this servo amplifier board
[11:22:20] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15357585510/
[11:22:27] <CaptHindsight> to 60A rating on the controller is what it is capable of
[11:22:34] <zeeshan|2> CaptHindsight: oh
[11:22:37] <CaptHindsight> controller/drive/amp
[11:22:51] <zeeshan|2> so in my case, its only 8.77A?
[11:22:58] <pcw_home> Yep
[11:23:11] <CaptHindsight> so if you used a larger transformer (more amps)
[11:23:21] <vapula> pcw_home: per CaptHindsight site, especially a comment under latency plots, "Unexpectedly long latencies may be caused by SMIs"
[11:23:23] <CaptHindsight> you could get more out of the controller
[11:23:28] <lair82> Or make me an offer?
[11:23:37] <zeeshan|2> okay
[11:24:24] <CaptHindsight> vapula: SMI, DMA, drivers talking directly to hardware etc etc
[11:24:30] <ssi> lair82: you see my question about picopsus?
[11:24:33] <pcw_home> The original transformer was 2.5 KW you dont need more than that
[11:24:59] <zeeshan|2> i'm trying to figure out how to power this amp, i have either 2 chocies, i can input 3 phase 165VAC (which when passed through those dsi35 diodes will and therefore output 240VDC)
[11:25:07] <vapula> well, i still don't get how DMA can increase CPU latency, other than cause a single memory transaction delay
[11:25:12] <zeeshan|2> or power it directly at L+ and L- using 240VDC.
[11:25:17] <zeeshan|2> my problem is i have no 3 phase.
[11:25:35] <zeeshan|2> and i'm having an impossible time finding where to buy a 240VAC->165VAC power transformer
[11:25:40] <zeeshan|2> they dont exist!
[11:25:41] <lair82> didnt know if that was directed at me or not? No we haven't dabbled in PICO yet, we use entirely Mesa
[11:25:57] <ssi> no I don't mean pico like jon elson's overpriced crap
[11:26:03] <archivist> vapula, the cpu cannot use memory at all during dma
[11:26:20] <ssi> lair82: I mean something like this
http://www.amazon.com/gp/product/B005TWE5E6/ref=s9_simh_gw_p147_d0_i2?pf_rd_m=ATVPDKIKX0DER&pf_rd_s=center-2&pf_rd_r=1R85T6GE7P9A5T1C3XZD&pf_rd_t=101&pf_rd_p=1688200382&pf_rd_i=507846
[11:26:22] <archivist> could be a long time
[11:26:36] <zeeshan|2> wow ssi
[11:26:38] <zeeshan|2> thats a cute little supply
[11:26:39] <zeeshan|2> :D
[11:26:44] <ssi> yesss
[11:26:53] <vapula> archivist: right, but DMA only occurs in batches, the GPU is only one of the many bus masters in the system
[11:27:16] <vapula> in essence, a CPU memory access is a DMA access of some sort
[11:27:21] <archivist> vapula, yes and how large are the batches!
[11:27:37] <vapula> well, a few bytes at most, rarely more than a line of cache
[11:27:43] <vapula> even in the case of big caches
[11:27:47] <zeeshan|2> ssi :-( halp me find 165vac transformer
[11:27:50] <archivist> hell no can be megabytes
[11:27:52] <zeeshan|2> 2.5kW
[11:27:56] <zeeshan|2> single phase :-(
[11:28:08] <vapula> archivist: agree to disagree there :)
[11:28:23] <lair82> I have never seen those, but you just sent me into frenzy, I normally just mount a regular PC power supply in the cabinet next to the motherboard.
[11:28:26] <pcw_home> Large block transfers on PCI buses for example block all other access
[11:28:31] <archivist> vapula, a disk drive can fill memory if it is told to
[11:28:47] <vapula> pcw_home: right, all other access on the same PCI bus, and the CPU isn't on the same bus
[11:29:30] <pcw_home> right so anythin tha accesses the PCI bus stalls the process --> latency
[11:29:38] <ssi> lair82: :D
[11:29:55] <vapula> stalls an entry in the memory controller, which usually is multi-master (or is really crap these days)
[11:30:15] <archivist> think pci device grabbing memory therefore stalling cpu for as long as it wants
[11:30:31] <vapula> that's one of the benefits of PCIe, in that it has flattened a great deal the memory architecture
[11:30:37] <pcw_home> stalls the process that may be needed by your realtime task
[11:31:27] <pcw_home> PCIE should help but I have not noticed much improvement
[11:34:03] <vapula> http://www.intel.fr/content/dam/www/public/us/en/documents/white-papers/ia-introduction-basics-paper.pdf page 3 and 4, DDR3 is always dual-channel, meaning you can always have two transactions "simultaneously"
[11:34:14] <vapula> at least not one blocking the other
[11:34:38] <pcw_home> As I said the problem is not memory
[11:34:58] <vapula> not memory, and not DMA either then
[11:35:07] <archivist> but what happens when you happen to chose the same channel as the dmi device
[11:35:14] <vapula> (sorry for being stubborn here)
[11:35:16] <pcw_home> DMA is a problem
[11:35:38] <archivist> dma has always been a problem
[11:36:17] <lair82> How bout $20 a piece plus shipping on the MB's
[11:36:48] <pcw_home> You are thinking about the memory side of the issue, the problem is not there, its on the I/O side
[11:36:55] <ssi> haha you want to get rid of them, huh
[11:37:04] <ssi> ok I can do two for $55 shipped
[11:38:32] <vapula> with atom, there is no dmi problem since it's internal
[11:39:16] <lair82> Yes 2 boards, shipped for $55. Give me an email, and I will have the invoice sent to you, I will ship them tomorrow, upon cleared payment.
[11:39:25] <ssi> pm'd you info
[11:39:40] <lair82> And yes, I want the shelf space back :)
[11:39:49] <ssi> I can paypal it right now if you can ship it today :D
[11:40:00] <vapula> thats one of the few benefits of atom vs core
[11:43:40] <lair82> I will try to get them out today, not sure though.
[11:46:22] <ssi> ok
[11:49:20] <lair82> jdh, what is that?
[11:49:52] <jdh> what is what
[11:50:04] <lair82> [~jdh@miranda.org] requested CTCP TIME from lair82:
[11:50:25] <jdh> oh, I was seeing what timezone you were in
[11:50:42] <lair82> i see,
[11:51:13] <lair82> How did you pm that to me?
[11:51:22] <jdh> I ctcp'ed you
[11:51:40] <jdh> 12:28 [freenode] CTCP TIME reply from lair82: Wed Oct 15 12:28:34 2014
[11:53:56] <ssi> zeeshan|2:
https://pbs.twimg.com/media/B0AG5eMIAAAMBeT.jpg:large
[11:54:28] <lair82> Right, I meant how did ssi pm me his info?
[11:54:43] <ssi> oh
[11:54:45] <ssi> /msg
[12:05:20] <lair82> put that after the message?
[12:05:49] <ssi> first
[12:05:54] <ssi> /msg ssi test
[12:06:35] <archivist> often the client opens a new irc window, just type in that
[12:21:31] <lair82> I guess my question is now, would those little picopsu's, say PICOPSU-150-XT, run a Asrock FM2A88X-ITX+FM2+ / FM2 with a AMD A4-6300 65W processor, and a kingston SV300S37A HD?
[12:23:20] <ssi> how much power does the HD want?
[12:23:26] <ssi> I'd say probably, if the HD is fairly low power
[12:23:46] <CaptHindsight> start up current is the highest
[12:24:52] <lair82> it says DC +5.0V 1A
[12:25:11] <ssi> yea that's only 5W
[12:25:15] <ssi> I bet that combo would work fine
[12:26:33] <lair82> Ok, going to get one on order now!!
[12:28:44] <ssi> :)
[12:29:08] <ssi> looking up how much power those gigabyte boards need
[12:29:16] <ssi> is it the GA-D525TUD?
[12:31:12] <ssi> I can't find power consumption info on it :P
[12:34:43] <ssi> someone tell the stock market to calm the hell down
[12:34:51] <_methods> it's got ebola
[12:34:54] <ssi> lolol
[12:36:16] <ssi> ok it's time for me to start writing my hal/ini files for the vmc :D
[12:38:17] <CaptHindsight> if you can add a heat sink/spreader to the picoPSU it should work at higher ambient temps in a closed machine cabinet
[12:38:56] <CaptHindsight> their MTBF rating is MTBF=100K hours at T(PSU) 55 Celsius
[12:40:57] <ssi> should I set this machine up in inches or mm?
[12:41:01] <ssi> the screws are probably metric
[12:41:08] <ssi> but I'm very much an inches person :)
[12:42:21] <jdh> metric makes much more sense
[12:42:31] <jdh> but I have not 'feel' for metric
[12:42:40] <ssi> makes more sense in what way
[12:42:55] <ssi> I'm not interested in a philosophical discussion about the relative merits of unit systems :)
[12:43:20] <jdh> in this context it is pretty much just arbitrary
[12:43:47] <jdh> but, for bolts, drilling, tapping, etc. metric sounds more logical.
[12:43:55] <ssi> uhm
[12:43:59] <ssi> ok never mind :)
[12:44:55] <jdh> a thou is as good a unit as a partial mm
[12:45:10] <_methods> i prefer metric
[12:45:40] <_methods> just depends on what your working with mostly though
[12:45:56] <_methods> if you're making your own prints and stuff use whatever you design in
[12:46:00] <ssi> this conversation certainly got away from me
[12:46:07] <ssi> I'm planning on running the machine in inches
[12:46:20] <ssi> I was just wondering if setting the machine up in mm would make more sense because of the metric screws
[12:46:28] <ssi> but I have pretty much already decided against that
[12:47:13] <_methods> it's personal preference
[12:47:44] <jdh> I have metric screws and inches
[12:49:31] <jdh> I like 0.001 as a sufficiently accurate measurement. Easier to think of than 0.02
[12:49:43] <_methods> quoting alot of stuff in metric will help you get used to teh "scale" of it vs imperial
[12:53:46] <ssi> Connor: around?
[12:55:18] <lair82> Yes it is, I don't see anything on the box or board, but looking around on google, I am seeing around 40W when being abused.
[12:55:32] <ssi> lair82: cool, thanks
[12:55:37] <ssi> I think I can get away with the 80W pico
[12:56:02] <ssi> found a brochure on the sabre 750 which says 0.315" lead screws, which'd be 8mm
[12:56:20] <lair82> I don't have the boxes for those, is that OK?
[12:56:28] <ssi> yeah it's fine
[12:56:31] <ssi> so long as they work :)
[12:56:54] <lair82> Guaranteed!!!
[12:57:37] <lair82> I don't like screwing over/around people that have bailed my ass out multiple times getting my machines going!!!
[12:59:49] <CaptHindsight> lair82: how high will the ambient air temp be where the picoPSU will be operated?
[13:00:37] <lair82> 75-80F
[13:03:35] <CaptHindsight> lair82: 80W should be fine, run it and measure the temp of the PSU, if it gets over 55C add a heat spreader
[13:08:08] <archivist> a joke
http://www.ebay.co.uk/itm/Lathe-chuck-horizontal-boring-machine-3-phase-spares-or-repair-/251678932128
[13:09:20] <_methods> hehe grab a bargain
[13:09:58] <_methods> seems a bit high for a rusty pile of junk that may or may not even be workin lol
[13:11:19] <CaptHindsight> the fancy connector probably sells for that new
[13:11:19] <archivist> a strange definition of a bargain
[13:11:22] <_methods> that right angle box though
[13:12:10] <_methods> convenient that he has limited technical knowledge
[13:12:47] <archivist> calling it a boring machine is an insult to all the other boring machines ever made
[13:13:19] <CaptHindsight> maybe they meant boring vs boring
[13:13:24] <_methods> heheh
[13:14:01] <roycroft> but the chuck is shiny
[13:14:08] <roycroft> isn't that worth �400?
[13:15:42] <zeehero> Hello everyone, was wondering if I could get some feedback on a bit of a silly project - I want to mount a rotary tool to my reprap with as few changes to the hardware as possible, I'm curious about how to find the limits of what it could do based on my motor strength.
[13:17:01] <ReadError> sounds like a horrible idea
[13:17:15] <_methods> join this room called #reprap
[13:17:19] <ReadError> not nearly rigid enough...
[13:17:20] <_methods> they know everything
[13:17:24] <ReadError> yes, what _methods said
[13:17:25] <ReadError> lol
[13:17:26] <lair82> Is it linear, or is the consumption current higher than the output capability on those picopsu's?
[13:17:27] <_methods> those guys are supah smart
[13:18:12] <zeehero> I'm already there, getting feedback, but it's fairly slow at the moment and it does tend to fall into this channel's expertise more.
[13:18:14] <CaptHindsight> lair82: the specs I glanced at showed the efficiency at >90% over a wide range
[13:18:31] <ReadError> zeehero, ya pretty sure everyone in here will tell you its a horrible idea too...
[13:18:59] <zeehero> I'm not expecting accuracy, nor any ambitious goals like cutting metals or wood, at most I'd like to use foam and cardboard.
[13:19:23] <zeehero> I only say this, because my hands aren't very steady when I use the rotary tool on my own.
[13:19:25] <ReadError> then whats motor strength matter for?
[13:19:33] <CaptHindsight> zeehero: which reprap the "original"?
[13:19:35] <_methods> are you using an arduino?
[13:19:44] <_methods> heheh
[13:20:12] <zeehero> In order - Motor strength to determine if I can even handle cardboard with such a setup as well as how fast it could realistically be to maintain what little accuracy it has.
[13:20:37] <zeehero> Pursa I2, which has the best rigidity of the Prusa line in my opinion.
[13:20:41] <archivist> rigidity matters even for cardboard
[13:20:59] <zeehero> And yes, so I don't expect much from the Arduino core, just straighter cuts than I can do by hand.
[13:21:01] <_methods> are you cutting empty toilet paper tubes or something?
[13:21:06] <CaptHindsight> lair82: the 150w version has the efficiency at 85% at 1A
[13:21:32] <zeehero> Just basic 1/8th corragated cardboard and lower.
[13:21:44] <_methods> sounds like you just want a rotab to turn something while you cut it?
[13:21:51] <ReadError> why would you mill cardboard?
[13:22:02] <CaptHindsight> " any idea what this means? Do not operate this PSU from a car battery as unit requires"
[13:22:33] <zeehero> ReadError: I ship a lot of figurines and having specifically designed cardboard inserts for support would greatly increase security during shipping.
[13:22:39] <CaptHindsight> don't do what it requires?
[13:22:59] <ReadError> put a laser on it
[13:23:01] <zeehero> And I like to play around with cardboard, simple as that.
[13:23:21] <lair82> So how big of a 12v power source do I need to run it?
[13:23:39] <_methods> oh he just wants to cut flat cardboard
[13:23:47] <zeehero> Basically.
[13:23:47] <_methods> i thought he said he wanted like a 4th axis
[13:24:05] <_methods> so you want to mount an exacto to your reprap
[13:24:14] <_methods> drag knife
[13:24:21] <CaptHindsight> like some really low cost (cheap) vinyl cutters
[13:24:32] <zeehero> Hmm, that is a possibility I hadn't considered.
[13:24:55] <CaptHindsight> lair82: find the picopsu 80w version data sheet
[13:24:56] <_methods> i'm sure you could make a drag knife mount
[13:25:03] <zeehero> But cardboard wears through blades fairly often in my experience.
[13:25:05] <_methods> but that bed will be a disaster
[13:25:12] <CaptHindsight> lair82: the other size supplies list all the details
[13:25:34] <_methods> hell you probably couldn't even cut cardboard on one of those rat traps
[13:25:38] <zeehero> Ah, I use cheap bed material that I can get locally. I'd take the glass off for the 'cnc' aspect.
[13:26:12] <CaptHindsight> I'd mount a laser diode and keep it away from flammables
[13:26:18] <_methods> i'm just sayin that bed isn't "designed" (and i use that term loosely) for pressure
[13:26:36] <zeehero> you don't think highly of 3D printers,do you _methods ?
[13:26:52] <_methods> no i have 2 of them
[13:26:58] <_methods> they're good at 3d printing
[13:27:04] <_methods> not cutting cardboard
[13:27:10] <_methods> i have a vinyl cutter for that
[13:27:24] <CaptHindsight> reprap is to 3d printers as McDonalds is to food
[13:27:27] <zeehero> I intend to build a CNC when I have the money.
[13:27:37] <zeehero> CaptHindsight: You're entitled to your opinions.
[13:28:01] <CaptHindsight> 3d printers are not just toy FDM printers
[13:28:04] <ReadError> typical reprapist attitude
[13:28:12] <_methods> https://www.dropbox.com/s/sh453l36r3e5vb2/2014-05-08%2017.52.02.jpg?dl=0
[13:28:16] <_methods> i picked that up for $100
[13:28:30] <zeehero> They get that cheap eh?
[13:28:35] <_methods> yeah used
[13:28:42] <zeeshan|2> hey its a another person
[13:28:42] <zeehero> I'll keep an eye out then.
[13:28:44] <zeeshan|2> with Z in their name :p
[13:29:15] <zeehero> ReadError: What is wrong with my attitude?
[13:29:25] <zeeshan|2> i need some help figuring out how to power my servo amplifier guys :(
[13:29:27] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15357585510/
[13:29:30] <zeeshan|2> so thats the diagram Top right.
[13:29:43] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15357153929/
[13:29:47] <zeeshan|2> here is the physical thing
[13:30:07] <zeeshan|2> its got 6 diodes dsi35
[13:30:09] <zeehero> I thought I was being polite and respectful.
[13:30:25] <CaptHindsight> zeehero: lots of wires from the look of that
[13:30:32] <zeeshan|2> CaptHindsight: only focus on top right
[13:30:35] <zeeshan|2> wher eits u v w
[13:30:36] <lair82> I can get a 100w DC power supply for
[13:30:51] <zeehero> hm, hang on
[13:30:58] <zeeshan|2> im trying to figure out if i can somehow still power this thing up
[13:31:01] <rabidpeep> This'll be easier.
[13:31:01] <lair82> $30 bucks, looks like that should work
[13:31:01] <zeeshan|2> w/ single phase
[13:31:18] <ssi> lair82: link?
[13:31:19] <zeeshan|2> by replacing the rectifiers to more powerful ones
[13:32:05] <CaptHindsight> zeeshan|2: did they talk you into single phase with full wave rectifier?
[13:32:21] <zeeshan|2> no ones talked me into anything yet :P
[13:32:28] <zeeshan|2> im sure it can be done
[13:32:35] <zeeshan|2> by simply replacing the rectifiers..
[13:32:41] <zeeshan|2> to 4 instead of 6
[13:32:44] <zeeshan|2> and sizing them up
[13:32:45] <archivist> it can as it is plain DC on the power bus
[13:32:45] <lair82> http://www.automationdirect.com/adc/Shopping/Catalog/Power_Products_(Electrical)/DC_Power_Supplies/5VDC,_12VDC,_24VDC,_Enclosed_Panel_Mount/PSS12-100
[13:33:10] <zeeshan|2> archivist: what can?
[13:33:12] <zeeshan|2> :)
[13:33:56] <archivist> but the charging current is going to hurt the caps and rectifiers if not capable
[13:34:06] <zeeshan|2> thats why im saying
[13:34:12] <zeeshan|2> or rather asking
[13:34:16] <zeeshan|2> is it theoretically possible
[13:34:26] <zeeshan|2> that i replace those rectifiers to higher current rated ones
[13:34:33] <zeeshan|2> and size up the capicator
[13:34:42] <zeeshan|2> so that they can take sqrt(3) more current?
[13:34:55] * zeeshan|2 needs to read the power supply book
[13:35:27] <archivist> the hold time for the cap has to be a lot longer (larger) the charging current rises a lot
[13:35:55] <ssi> yeah basically you need to figure out the ripple current on single phase, and size the capacitors for that ripple current
[13:36:02] <zeeshan|2> isnt the formula
[13:36:05] <ssi> which will be significantly higher
[13:36:11] <zeeshan|2> c = 2.4*I_L / v_rms
[13:36:17] <archivist> plenty of online resources to design rectifier cap combination
[13:36:21] <zeeshan|2> where i_l is the current
[13:36:25] <zeeshan|2> and v_rms is the voltage supply
[13:36:36] <rabidpeep> Wow,it really does look like a cutting plotter would be much more useful.
[13:36:55] <zeeshan|2> so the only thing left to figure out
[13:37:00] <zeeshan|2> is this transformer
[13:37:10] <zeeshan|2> i have been trying to stare at it for a while and figure out whats going on
[13:37:11] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15544828292/in/photostream/
[13:37:18] <zeeshan|2> green are the primary, yellow secondary
[13:37:28] <archivist> just work back from desired DC voltage
[13:37:53] <zeeshan|2> archivist: well i have a 3 ph transformer thats @ 165vac (which is what i need)
[13:37:53] <CaptHindsight> http://www.uscutter.com/USCutter-MH-Series-Vinyl-Cutter-w-Sure-Cuts-A-Lot-Pro-Design-Cut-Software $200 new
[13:38:01] <zeeshan|2> but im wondering if i can somehow use it using single phase
[13:38:11] <zeeshan|2> because i can't find a 165VAC transformer anywheree
[13:38:14] <zeeshan|2> i looked for 3 hours
[13:38:24] <zeeshan|2> @ 2.5KVA
[13:38:32] <archivist> zeeshan|2, probably not due to the higher currents
[13:38:48] <CaptHindsight> zeeshan|2: whats in your space 120/240 or 120/208?
[13:38:54] <zeeshan|2> 120/240
[13:39:01] <zeeshan|2> well i dont know if its 240
[13:39:01] <archivist> get one made or get a switchmode direct to the DC voltage
[13:39:04] <zeeshan|2> i should probably check
[13:39:16] <CaptHindsight> delta vs wye
[13:39:16] <zeeshan|2> archivist: but this transformer might be able to handle single phase
[13:39:32] <zeeshan|2> CaptHindsight: lemme actually go measure the high voltage
[13:39:37] <zeeshan|2> its a good question :p
[13:39:57] <archivist> zeeshan|2, doing it all on one coil/core means you are likely to go over the saturation current
[13:40:06] <CaptHindsight> zeeshan|2: use a meter, not the wires to the tongue like for batteries
[13:41:07] <archivist> the ripple current is probably 3 times higher than when on three phase
[13:42:34] <jdh> isnt' pretty much all north american residential power 120/240?
[13:42:58] <_methods> no it can be all over the place
[13:43:24] <_methods> regional
[13:43:32] <jdh> 115 +/- 5
[13:43:52] <_methods> hell there is even a place in philadelphia that still uses two phase
[13:45:25] <CaptHindsight> jdh: it used to be, but everything new residential is 102/208
[13:45:57] <CaptHindsight> and in larger cities they started changing out from delta to wye back in the 80's
[13:46:15] <CaptHindsight> cities residential neighborhoods
[13:46:30] <ssi> that's awful :P
[13:46:34] <CaptHindsight> it's much easier to balance
[13:46:40] <jdh> that must be regional too. Nothing around here
[13:47:02] <ssi> yeah I've never come across anything 208 other than plant 3ph that was intentionally wired wye
[13:47:08] <Jymmm> Zentangle Car
http://news.distractify.com/pinar/sharpie-car/?v=1
[13:47:49] <_methods> a skyline too
[13:48:36] <CaptHindsight> http://www.ebay.com/itm/Siemens-Transformer-4AP4074-2CB-prim-380V-sec-165V-3-phase-/390918192827
[13:48:49] <_methods> well there ya go
[13:49:00] <_methods> CaptHindsight FTW
[13:49:12] <CaptHindsight> that why it's such an odd voltage
[13:49:19] <zeeshan|2> my tongue says its 240vac
[13:49:30] <CaptHindsight> 380V primary 165V secondary
[13:50:32] <zeeshan|2> archivist: i am planning to use 2 coils
[13:50:56] <zeeshan|2> for each split phase
[13:50:58] * zeeshan|2 shrugs
[13:52:09] <archivist> you better not get that wrong, else bang
[13:52:20] <zeeshan|2> yes
[13:52:29] <zeeshan|2> fried transformer won't be nice
[13:52:58] <archivist> transformer wont notice, you and your wiring will
[13:53:24] <archivist> they are robust for short periods
[13:54:38] <zeeshan|2> before i do anything fancy
[13:54:43] <zeeshan|2> im going to read my entire power transformers book
[13:54:50] <zeeshan|2> its called "building power supplies"
[13:55:46] <CaptHindsight> http://www.ebay.com/itm/MASSIVE-5KVA-Toroidal-Transformer-Core-High-Voltage-Current-Audio-Amplifier-HAM-/221570936382
[13:58:50] <archivist> I have one in the loft larger diameter but less iron
[13:59:04] <zeeshan|2> how much of that transformer
[13:59:07] <zeeshan|2> is copper and iron
[13:59:16] <zeeshan|2> like it says its 72lb
[13:59:47] <archivist> cannot know as we have no winding data
[14:00:06] <CaptHindsight> http://www.ebay.com/itm/Toroidal-laminated-core-for-AC-power-transformer-3000VA-3-day-/181346663369 wind it yourself
[14:00:26] <archivist> I took mine to the local transformer company to get it tested
[14:00:32] <CaptHindsight> http://www.ebay.com/itm/Toroidal-laminated-core-for-AC-power-transformer-2000VA-3-day-/181346655998
[14:00:43] <cradek> archivist: but it says "high voltage current audio amplifier ham" right on the auction
[14:01:13] <archivist> hehe
[14:01:25] <archivist> salesman!
[14:02:27] <CaptHindsight> https://www.youtube.com/watch?v=wTQD9yJRG-0 TOROIDAL WINDING MACHINE MADE SIMPLE " Any one can make it" 2
[14:03:47] <archivist> iirc there is a rule of thumb copper to iron but you would have to ask someone who designs transformers
[14:04:08] <zeeshan|2> this is a silly question
[14:04:19] <zeeshan|2> but what dictates the current capacity of a transformer?
[14:04:39] <_methods> the iron plates and winding coils
[14:04:43] <zeeshan|2> i remember coverting this
[14:04:47] <zeeshan|2> in class a long time ago
[14:04:47] <archivist> the saturation of the core and wire sizes
[14:04:50] <zeeshan|2> something about the iron losses?
[14:04:57] <_methods> depending on the construction of the core
[14:05:32] <zeeshan|2> so say you have transformer a that can handle 6A currently
[14:05:38] <archivist> more iron is less saturation for a set current
[14:05:41] <zeeshan|2> and nwo for some reason you decide you want to make the iron core smaller
[14:05:54] <zeeshan|2> by half the size, now the transformer can only transmit 3A
[14:05:57] <zeeshan|2> on the secondary side? :p
[14:06:01] <archivist> it becomes a hot transformer
[14:06:26] <zeeshan|2> so the current limiting is done on your secondary side
[14:06:28] <zeeshan|2> with the use of a resistor
[14:06:36] <zeeshan|2> so you dont run the transformer too hot
[14:06:38] <archivist> smell of burning, it becomes a saturated regulating transformer
[14:15:01] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15357763227/in/photostream/lightbox/
[14:15:04] <zeeshan|2> so pretty
[14:15:59] <zeeshan|2> https://www.flickr.com/photos/128539016@N05/15520070716/
[14:24:34] <CaptHindsight> http://www.st.com/web/en/resource/technical/document/datasheet/CD00176575.pdf BUX48
[15:13:17] <zeeshan|2> i guess it looks ike
[15:13:28] <zeeshan|2> a 240 to 165vac single phase transformer
[15:13:31] <zeeshan|2> must be custom wound.
[15:13:33] <zeeshan|2> :-(
[15:15:30] <CaptHindsight> unless you can find a ~1.5:1 transformer somewhere
[15:15:40] <zeeshan|2> why do you say 1.5:1
[15:17:09] <CaptHindsight> 165 x 1.45 = 240
[15:18:06] <zeeshan|2> i called the biggest supplioer here
[15:18:11] <zeeshan|2> he says 165vac to 240 is a custom thing
[15:18:17] <zeeshan|2> they only do 240vac to 120vac
[15:19:36] <jdh> get some wire, start winding.
[15:19:41] <ssi> see if they have a 380 to 240
[15:20:45] <zeeshan|2> ssi thats a standard one
[15:20:50] <zeeshan|2> 380 to 240
[15:20:53] <ssi> yeah
[15:20:53] <ssi> use that
[15:20:54] <ssi> :)
[15:20:58] <zeeshan|2> how
[15:21:02] <zeeshan|2> i need 240vdc
[15:21:05] <ssi> backwards
[15:21:09] <ssi> it's 1.58:1
[15:21:22] <zeeshan|2> so instead of giving 380v
[15:21:23] <ssi> should give you about 220VDC
[15:21:26] <zeeshan|2> i give it 240vdc
[15:21:29] <zeeshan|2> er
[15:21:30] <zeeshan|2> 240vac
[15:21:36] <ssi> yes
[15:21:40] <zeeshan|2> hmm!
[15:21:43] <ssi> and it'll spit out like 152VAC
[15:22:12] <cradek> remember if you run the primary below spec, derate the transformer's VA proportionally
[15:22:28] <ssi> you needed 2.5kva, right?
[15:22:31] <zeeshan|2> yea
[15:22:34] <ssi> 4 or 5 kva 380:240 should do what you need
[15:25:18] <zeeshan|2> am i doing something wrong
[15:25:31] <zeeshan|2> i thought 240VAC gives you 339VDC
[15:25:38] <zeeshan|2> but im looking through the book again
[15:25:49] <zeeshan|2> it actually gives you 152VDC
[15:25:58] <zeeshan|2> according to the formula .636*v_pk
[15:26:11] <zeeshan|2> for a bridge rectifier setup
[15:28:44] <ssi> there are many different topologies for rectification
[15:28:48] <ssi> do yourself a favor
[15:28:52] <ssi> go download PSU Designer UU
[15:28:56] <ssi> er, II
[15:29:06] <ssi> http://www.duncanamps.com/psud2/
[15:29:20] <zeeshan|2> by topologies
[15:29:24] <zeeshan|2> you mean half rectifier
[15:29:24] <zeeshan|2> etc
[15:29:27] <ssi> yes
[15:31:23] <zeeshan|2> see
[15:31:34] <zeeshan|2> i wasd doing 165VAC cause thats what this transformer says
[15:31:43] <zeeshan|2> but its going to be different for 3 phase i guess
[15:32:22] * zeeshan|2 is thinking its time to get amc drives
[15:32:27] <zeeshan|2> and not have to deal wit hthis shit!
[15:39:26] <ssi> zeeshan|2: I'm tuning my amc drives right now :)
[15:40:28] <zeeshan|2> you got em already?
[15:41:08] <ssi> I have the SE drives
[15:41:11] <ssi> don't have the BE drives yet
[15:42:02] <zeeshan|2> i see be listed there
[15:42:04] <zeeshan|2> analog drives
[15:42:06] <zeeshan|2> whats se?
[15:42:22] <ssi> se are sinusoidal drives
[15:42:25] <ssi> the be only do trapezoidal
[15:42:27] <zeeshan|2> ah
[15:42:30] <ssi> not important for you, cause brush motor
[15:59:09] <PCW> zeeshan|2 you still need a power supply for the AMC drives
[16:00:21] <zeeshan|2> pcw
[16:00:27] <zeeshan|2> the one ssi showed me has built in supplies
[16:00:30] <zeeshan|2> you just give them 240vac
[16:00:52] <PCW> Thats nice (though not as nice as a common supply)
[16:01:15] <zeeshan|2> the big problem with my servo amp is it wants 240VDC +/-10
[16:01:18] <zeeshan|2> unlike other servo amplifiers
[16:01:22] <zeeshan|2> which can accept a big range
[16:01:49] <PCW> Ahh hence the 165VAC
[16:02:05] <zeeshan|2> do they do 165*sqrt(2)?
[16:02:16] <zeeshan|2> where is the sqrt2 coming from
[16:02:48] <zeeshan|2> pcw the servo drive you guys sell.. would it work for my app?
[16:02:52] <zeeshan|2> application
[16:03:27] <cradek> zeeshan|2: why not make a rotary phase converter and just keep your machine intact
[16:03:39] <cradek> single phase conversions are hard
[16:06:00] <PCW> Yeah you will need filter capacitors also if you use single phase, a rotary converter might be the easiest
[16:14:37] <zeeshan|2> cradek
[16:14:44] <zeeshan|2> i want it to be linuxcnc
[16:14:56] <zeeshan|2> and the cabinet takes too much space
[16:15:24] <zeeshan|2> if i have to buy a rpc to power this amplifier
[16:15:30] <zeeshan|2> im just going to get brand new amplifiers from amc
[16:15:33] <zeeshan|2> itll end up costing the same
[16:21:49] <PCW> You could probably use a 120/120 isolation XFMR plus a 48V transformer
[16:22:22] <zeeshan|2> im confused about basic electronics
[16:22:24] <zeeshan|2> thats half the problem
[16:22:41] <zeeshan|2> my book is saying if you have v_dc output is = .636 v_peak
[16:22:57] <PCW> 48+120=168 :-)
[16:23:04] <zeeshan|2> yes i get that
[16:23:11] <zeeshan|2> but if i have 168 vac on the secondary side
[16:23:20] <zeeshan|2> 168*.638 != 240vdc
[16:23:33] <PCW> capacitor input filter gives sqrt(2)* RMS value
[16:24:01] <PCW> (that is, the peak AC voltage)
[16:24:26] <ssi> zeeshan|2: 240VAC is Vrms, not Vpeak
[16:24:50] <zeeshan|2> yes 1.414 * 240
[16:24:51] <zeeshan|2> would be peak
[16:24:52] <zeeshan|2> oh.
[16:25:29] <zeeshan|2> 1.414*240 = 340vac
[16:25:39] <zeeshan|2> 340 * .636 = 216VDC
[16:26:07] <zeeshan|2> anyway it doesnt matter
[16:26:14] <zeeshan|2> im going to use your program
[16:26:14] <zeeshan|2> :D
[16:26:34] <ssi> psud? it's handy
[16:26:37] <zeeshan|2> yes
[16:26:55] <zeeshan|2> according to it, as is right now using the transformer specs
[16:27:06] <zeeshan|2> after rectification, it should output 229.75VDC
[16:27:18] <zeeshan|2> which is dead on what the amplifier is speced for
[16:33:07] <cradek> the single phase equivalent of the transformers you have will be 3-5x as big and heavy, so your machine will have to get bigger either way :-/
[16:33:10] <Deejay> gn8
[16:34:06] <PCW> Yeah and you either pay money for bigger transformers and added capacitors or for a large motor
[16:35:21] <JT-Shop> RPC's are easy to make
[16:48:10] <sonopard> hey there, i want to use the bbb i have lying around with a custom made "cape" (read: breadboard) .. the status of pru-stepgen can be considered ready for use in machinekit, yes?
[16:48:24] <sonopard> also, should i be using machinekit, i'm confused.. is it a fork?
[16:51:07] <sonopard> and finally, if anyone knows how to map pins .. i.e. the example files has e.g. steppin configured as "0xA6" but i have no idea where this number comes from.. could use the source i suppose <.<
[16:51:34] <ssi> the pin mapping stuff is all in the technical resource manual
[16:51:34] <sonopard> i do have some experience with the PRUSS and the chip, we evaluated it for a project a year ago, so yea
[16:51:39] <sonopard> ok thanks
[16:52:36] <sonopard> ah, the number did seem familiar
[16:54:29] <sonopard> hm i have the old PDF at work i think.. mreh
[16:55:53] <sonopard> yea, this may take more than one evening perhaps.. i don't really know a lot about linuxcnc, but more than the guy who built the machine.. and i used to know a lot about the AM3359 but the project never took off..
[17:00:22] <sonopard> *glosses over the PRU chapter* yea, that was fun..
[17:04:56] <sonopard> so where's the active development branch of hal_pru_generic? is charles still working on it?
[17:09:03] <PCW> sonopard: you will probably get better answers at the machine kit blog
[17:10:50] <CaptHindsight> sonopard: yes, it's a fork of Linuxcnc
[17:10:59] <ssi> PCW: I'm working on servo tuning, and I just can't seem to get rid of this constant little bit of oscillation in the ferror
[17:11:02] <ssi> https://pbs.twimg.com/media/B0BPeSOIQAAXlL4.png:large
[17:11:07] <ssi> that's on a long constant velocity move
[17:11:18] <ssi> 200ipm
[17:11:48] <ssi> looking at JT's page on tuning, his are straight as an arrow
[17:14:53] <PCW> is this torque mode?
[17:15:05] <ssi> velocity mode
[17:15:20] <PCW> what velocity feedback to the drive?
[17:15:23] <ssi> encoder
[17:15:47] <PCW> What drive?
[17:15:52] <ssi> amc se10A20
[17:16:41] <PCW> so the drive connects to the encoder for velocity feedback?
[17:16:49] <ssi> yeah, and also for sinusoidal commutation
[17:17:34] <sonopard> will/does linuxcnc support the pru driver? why did machinekit fork (i realize i should ask this to the machinekit people, yes.. just asking)
[17:17:56] <ssi> there is a hal driver for pru stepgen, yes
[17:17:59] <PCW> is that oscillation or torque ripple
[17:18:24] <CaptHindsight> sonopard: xenomai and the PRU are all part of machinekit, not Linuxcnc
[17:18:28] <ssi> PCW: that's a good question! I'm pretty sure they're operating sinusoidally at this point, so I'd expect there to be no significant torque ripple
[17:19:03] <PCW> theres always some torque ripple
[17:19:19] <CaptHindsight> xenomai is only in a testing branch of linuxcnc that was never official, supported etc etc
[17:19:29] <ssi> well let me put it this way; I have it tuned to where other than that ripple, ferror stays pretty flat
[17:19:41] <ssi> and yet when I set ferror to a sane value in the ini, it always faults as soon as I jog
[17:20:34] <PCW> if you increase P does the ripple get better or worse ?
[17:21:39] <PCW> (torque ripple errors will get better with more P)
[17:22:06] <ssi> stays about the same til it oscillates
[17:23:54] <PCW> sounds like the drives velocity loop gain is too high (oscillation) or too low (torque induced ripple)
[17:24:45] <PCW> what is the plots time scale?
[17:33:03] <ssi> lemme try to capture a new image, I tuned it a bit better
[17:34:23] <ssi> https://pbs.twimg.com/media/B0BU6dEIcAAwMQS.png:large
[17:34:46] <ssi> that's at 480ipm, which should be about the max speed of this machine
[17:34:53] <ssi> also this is just a motor, no load
[17:51:04] <ssi> that's working ok if I keep ferror at 0.005"
[17:51:07] <ssi> any lower and it faults
[17:59:35] <CaptHindsight> http://www.3ders.org/articles/20141015-peachy-printer-released-it-latest-3d-prints.html proof of how bad it prints, no surprise here
[18:01:09] <_methods> but it's got lazers
[18:01:17] <_methods> and a cute name
[18:01:31] <CaptHindsight> next up a lathe made entirely of rubber bands
[18:01:39] <_methods> and cat turds
[18:01:47] <Meduza> And got a lot of attention for being cheap
[18:02:09] <_methods> but it's sla
[18:02:13] <_methods> it's da future
[18:02:36] <Meduza> Are they still doing it with homebuilt galvos?
[18:02:45] <CaptHindsight> it's amazing how these maker types can take something that actually works pretty well and mess it up completely
[18:03:05] <ssi> lol
[18:03:23] <CaptHindsight> maybe it was a plot by the FDM sellers to show how bad SLA really is
[18:03:49] <_methods> because they're smart enough to hatch a plan like that...............
[18:04:30] <CaptHindsight> well I do tend to over estimate people
[18:05:23] <_methods> i watched that 3d printer movie they made
[18:05:25] <_methods> zomg
[18:05:42] <_methods> what a steaming pile of poo
[18:05:58] <_methods> the movie was good
[18:06:17] <_methods> but the people involved would be the steaming pile of poo part
[18:06:33] <_methods> that makerbot guy is quite the turd
[18:08:03] <Jymmm> I tried to watch it, but stopped after 5 minutes.
[18:08:40] <_methods> yeah i wish i had skipped to the last 30min
[18:08:46] <_methods> maybe 15
[18:09:06] <Jymmm> I wish I skiped all of it.
[18:09:13] <_methods> hahah
[18:09:28] <CaptHindsight> lol
[18:09:43] <Jymmm> and in conclusion.... glorfied hot glue gun stil remains true.
[18:10:14] <Jymmm> although... photosynth is something different
[18:10:15] <_methods> well it was still interesting to see how he fucked everyone around him
[18:10:41] <Jymmm> wouldn't a porn flick have at leat been more entertaining?
[18:10:55] <_methods> indeed
[18:10:57] <Jymmm> ...if you just want to see ppl get fucked that is.
[18:10:58] <CaptHindsight> we SLA all kinds of parts even sub micron using two photon and interference techniques, what a steaming pile that thing is
[18:11:41] <_methods> well the mit kids with the sls printer made it worth while to some extent
[18:12:02] <CaptHindsight> small and slow but 50um features
[18:12:22] <CaptHindsight> they also got $20M more in venture funding after that kickstarter
[18:12:57] <_methods> yeah
[18:13:30] <_methods> was funny watching them get their teeth kicked in my real life manufacturing
[18:13:38] <_methods> you can learn a lot in school
[18:13:52] <_methods> but not about the real nad smashings
[18:14:21] <_methods> when all your boards come in and start failing or shit that don't fit heheh
[18:14:39] <_methods> s/my/by
[18:19:57] <ssi> heh tell me about it
[18:22:24] <PCW> can you adjust the drives velocity loop gain?
[18:22:37] <CaptHindsight> I need to start selling those resin (glue) granite (bag of gravel) kits
[18:22:39] <ssi> PCW: yeah
[18:22:50] <ssi> if I turn it down, it starts to drift... if I turn it up, the motor starts to make noise
[18:23:00] <ssi> I basically turned it up til the motor started buzzing, then backed it off til it was quiet again
[18:24:08] <CaptHindsight> ssi: what happens if you whack it when it's stopped?
[18:24:21] <ssi> it's locked up pretty tight when stopped
[18:25:05] <ssi> I'm wondering if it'll get more stable once I put the motor back in the machine, and the inertia of the table is there
[18:29:08] <PCW> Yes its hard to tune bare motors
[18:29:45] <ssi> ok I'll call that good then until I can get back down there to reinstall it
[18:34:18] <ssi> debating going down tonight and installing that motor and the VFD, and starting to get the spindle running
[18:34:59] <PCW> if you are tuning low inertia/higher bandwidth systems , raising the servo thread rate will help
[18:35:17] <ssi> oh it should have plenty of inertia when it's put together
[18:35:53] <ssi> that motor is running a 1.25" ballscrew that's driving a 27x22" 3" thick iron table with a matching 3" thick tooling plate bolted to it
[18:36:18] <PCW> usually just the ball screw make a huge difference
[18:36:50] <PCW> direct ball screw drive?
[18:36:53] <ssi> yeah
[18:37:30] <ssi> good news though, my hall state converter seems to work well :)
[18:38:24] <PCW> That's great
[18:38:53] <ssi> but that's with these sinusoidal drives
[18:39:04] <ssi> I imagine using a full-time trapezoidal drive, I ought to make the converter more accurate
[18:39:19] <ssi> right now it's only accurate to something like 7.25 degrees on all but two state transitions
[18:39:48] <ssi> I thought about making a mk2 converter that watches the encoder and uses it to more accurately align the hall states
[18:41:08] <PCW> not needed (7.5 degrees is unimportant if you do do sinusoidal commutation)
[18:41:38] <ssi> yeah, what I mean is if I were using a drive that only did trapezoidal commutation... in that case it'd need to be more accurate, wouldn't it?
[18:41:56] <ssi> the sinusoidal drives I have I think are a bit too small; I have some trapezoidal drives coming, and not sure which I'm going to use yet
[18:43:07] <PCW> Yeah for a trapzoidal drive 7.5 on top of the 30 degree error is bad
[18:44:03] <PCW> (trapezoidal drives are already ticky no need to make them more so)
[18:44:06] <ssi> right
[18:44:36] <ssi> the nameplate on the motors says 6.8A, I'm still unclear as to whether that's a peak or a continuous number
[18:44:45] <ssi> these drives are 10A peak, 5A continuous
[18:44:51] <PCW> how many KW
[18:44:52] <ssi> and that's peak current, not rms current
[18:44:53] <ssi> 1kw
[18:45:01] <ssi> or .9kw, not sure which exactly
[18:45:04] <ssi> it's not labeled that way :/
[18:45:38] <PCW> so 6.8A is continuous
[18:45:57] <PCW> so 4x=27A or so peak
[18:46:07] <ssi> yeah these drives are definitely too small then
[18:46:32] <PCW> maybe 3 x to be conservative so 20 A
[18:46:59] <PCW> (not sure what rotor magnets are made of)
[18:47:16] <ssi> it's a fanuc model 5... there's pretty much zero documentation on them online
[18:47:41] <ssi> the trap drives I have coming are 25A/12.5A
[18:47:52] <ssi> they make a sinusoidal drive like this which is 30/15, but I haven't been able to find any
[18:53:02] <PCW> you didnt want to try the original drve? Or is that a 3 phase power issue
[18:53:11] <ssi> yeah, 3 phase issue
[18:53:32] <ssi> plus it's a massive monstrosity that's opaque, poor documentation, and if it fails it's thousands of dollars to repair
[18:53:38] <ssi> plus if I sell it while it's working, it's worth thousands of dollars
[18:54:00] <ssi> but it wants 185VAC 3ph as supply power
[18:54:07] <PCW> I think the Fanuc drives use rectified 120V (though some have 100VAC also)
[18:54:42] <PCW> and actual transistors
[18:55:00] <PCW> they are not terribly complicated
[18:55:59] <ssi> yeah here's the page.. it wants 185V three phase, 5kva, plus +/-18V
[18:57:08] <PCW> must be the Japanese equivalent of 208V
[18:58:43] <ssi> hm it also wants 100VAC
[18:58:46] <ssi> to run the brakes perhaps?
[18:58:56] <PCW> I you look at your drive you should see a 100VAC input
[18:59:50] <ssi> https://pbs.twimg.com/media/B0BoevdIYAA35ks.jpg:large
[19:00:10] <PCW> 100VAC runs a transformer on the drive that powers the LV power supply
[19:00:37] <ssi> LV for logic etc?
[19:00:47] <ssi> it also has that +/-18VAC supply, I wonder why that is
[19:00:50] <PCW> Yes
[19:07:31] <PCW> not sure my single axis drive doesnt have that
[19:26:02] <ssi> PCW: so my spindle drive is a hitachi WJ200 vfd.. it talks about being able to do decent low-speed control and positioning with feedback
[19:26:11] <ssi> but from the docs, it looks like the feedback is just a pulsetrain of some kind
[19:26:15] <ssi> know anything about that?
[19:30:16] <ssi> "You can use the pulse train input for process variable (feedback) of PID control."
[19:30:37] <ssi> "(3) Simple positioning by pulse train input. This is to use the pulse train input like an encoder signal. You can select three types of operation."
[19:30:50] <ssi> it doesn't say what the types of operation are though :D
[19:45:48] <ve7it> .
[19:47:51] <ssi> PetefromTn_: you here?
[19:48:03] <PetefromTn_> semi
[19:48:10] <PetefromTn_> eating dinner
[19:48:19] <ssi> ok I won't bug ya
[19:48:26] <PetefromTn_> whats up?
[19:48:37] <ssi> just trynig to gather intel for this orient thing
[19:48:49] <PetefromTn_> Oh BABY I LOVE YOUR WAY>..
[19:48:58] <ssi> reading up on modbus, and it talks about how the drive state is sent across the serial line like 10 times a second
[19:49:07] <ssi> which is probably far too slow to close the position loop in linuxcnc
[19:49:19] <ssi> but the drive manual talks about how it can do positioning based on pulse train input
[19:49:30] <ssi> I just can't figure out how that works, and the manual sucks :)
[19:51:13] <PetefromTn_> I am not sure either. Someone said something about routing the encoder input into the drive as well as the 7i77...?
[19:51:23] <ssi> yeah, I said that
[19:51:32] <ssi> but looking at the manual, I don't think it has a quadrature input
[19:51:35] <ssi> just this weird pulse-train deal
[19:53:57] <PetefromTn_> hang on
[19:54:04] <PetefromTn_> I am getting the manual here.
[19:54:12] <PetefromTn_> and finishing my hamsteak LOL
[19:54:14] <ssi> :)
[19:54:50] <ssi> so look at either page 43 of the little quick ref book that comes with it
[19:54:56] <ssi> or 4-89 of the full manual
[19:55:03] <ssi> they say the same thing
[19:56:08] <ssi> Can I use an inverter and AC induction motor in a positioning application?
[19:56:08] <ssi> A. That depends on the required precision, and the slowest speed the motor must turn and still deliver torque. The WJ200 inverter will deliver full torque while turning the motor at 6Hz (180RPM). DO NOT use an inverter if you need the motor to stop and hold the load position without the aid of a mechanical brake (use a servo or stepper motion control system).
[19:57:58] <PetefromTn_> well for me that would be 90 RPM on the spindle due to the 2-1 ratio
[19:58:18] <ssi> yeah
[19:58:26] <ssi> ok look at 3-114 in the full manual if you have it
[19:58:33] <ssi> you can wire up an encoder directly
[19:58:45] <PetefromTn_> still absorbing the first one LOL
[19:58:49] <ssi> but it's single ended
[19:59:49] <ssi> it may be possible to tell this drive over modbus to position to a particular angle
[19:59:52] <ssi> that would be pretty sweet
[20:00:23] <jdh> I have a screwdriver that does that.
[20:00:40] <PetefromTn_> that would be sweet indeed
[20:01:25] <ssi> I ordered a little rs232 to rs485 converter from amazon
[20:01:28] <ssi> for modbus
[20:01:38] <PetefromTn_> yeah that is what I used.
[20:01:52] <PetefromTn_> it works fine so far but again not sure about this orient thing.
[20:02:21] <ssi> well if the drive can do positioning all by itself, that'd be ideal
[20:02:30] <ssi> we might have to fake the encoder signals it sees though
[20:02:37] <PetefromTn_> why?
[20:02:37] <ssi> since it wants single ended, and 32 to 1024 ppr
[20:02:53] <ssi> surely your encoder is finer than 256 lines
[20:02:54] <PetefromTn_> my encoder is 500 line
[20:03:21] <ssi> so that's 2000 ppr, and that's on the motor
[20:03:28] <ssi> so you get 4000 pulses per spindle rev
[20:03:32] <PetefromTn_> so 2-1 setup it would 1000
[20:03:46] <ssi> motor turns twice for every spindle rev, yeah?
[20:03:51] <PetefromTn_> yeah
[20:03:58] <ssi> so yeah that's 4000ppr
[20:04:07] <ssi> remember there's four pulses per line
[20:04:17] <ssi> four counts per line that is
[20:04:29] <PetefromTn_> would it not just look for the index?
[20:04:40] <ssi> not for positioning!
[20:04:56] <ssi> if all you cared about was speed, you could just count index pulses
[20:06:07] <ssi> In the simple positioning mode, the inverter runs the motor until the machine reaches
[20:06:10] <ssi> the target position according to the following settings, and then stops the motor with
[20:06:13] <ssi> DC braking.
[20:06:17] <ssi> this might actually work :P
[20:06:45] <PetefromTn_> I thought you just said it had too much line count?
[20:07:14] <PetefromTn_> I'm sorry my brain is kinda fried right now....
[20:07:22] <ssi> 20:43 < ssi> we might have to fake the encoder signals it sees though
[20:07:22] <ssi> 20:43 < ssi> since it wants single ended, and 32 to 1024 ppr
[20:07:28] <PetefromTn_> I have been working on building my own website all day.
[20:07:49] <PetefromTn_> how would we do that?
[20:08:05] <ssi> divide it in hal and send it out an output pin to the pulsetrain input of the inverter
[20:08:19] <ssi> or divide it in a little cpld board
[20:08:43] <ssi> the upside to me making 30 of those fanuc commutation converters is we can use them for other things, like monkeying around with encoder signals
[20:08:44] <PetefromTn_> it is already input for me into the 7i77 so I suppose that would be doable.
[20:10:08] <ssi> here's one potential problem
[20:10:20] <ssi> The position at power up is home position (Position data = 0). If power is removed, current position data is lost.
[20:11:02] <PetefromTn_> well I know you are going to get your motor running now that you have your drive there but if we wanted to we could play with my setup to see how well any of this works.
[20:11:58] <ssi> well one thing you can do if you want to play with it is hook up an output pin to the pulsetrain input on the vfd
[20:12:33] <ssi> actually probably two
[20:13:38] <ssi> do you use 24V for field IO on your 7i77?
[20:14:02] <PetefromTn_> yes
[20:14:06] <ssi> good
[20:14:16] <ssi> the EA and EB inputs are the pulsetrain inputs
[20:14:22] <ssi> they want 24VDC specifically
[20:15:40] <ssi> so you could run three wires from the '77 to the vfd, one ground, and two free gpio outputs
[20:15:48] <ssi> ground goes to L, the two outputs go to EA and EB
[20:16:55] <PetefromTn_> I will have to look and see what the output situation looks like. W
[20:17:03] <PetefromTn_> what do we couple the outputs from?
[20:17:14] <ssi> we'll make them in software
[20:17:27] <PetefromTn_> yeah I know but from what?
[20:17:47] <ssi> gonna have to come up with some component that can take the a and b signals from the spindle encoder and divide them
[20:18:38] <jdh> do you need direction?
[20:18:41] <PetefromTn_> there is no way to make it orient to the index pulse?
[20:19:14] <ssi> even if there were, the index pulse isn't where you want it to be
[20:19:23] <ssi> jdh: I'm not quite sure about that
[20:19:30] <PetefromTn_> yeah but we can swap the belts on the pulleys
[20:19:49] <jdh> can you use A only
[20:19:52] <ssi> alright well you do it however you want :P
[20:20:22] <ssi> jdh: I'm really not sure
[20:20:40] <ssi> jdh: the manual shows different ways to do it, and some involved an A pulse and some other method of determining direction
[20:20:52] <ssi> also the EA input is faster than the EB input
[20:21:06] <ssi> so what migght make sense is to give it A on EA, but give it just a direction signal on EB
[20:21:22] <ssi> one of the modes it supports is pulsetrain on EA and fixed direction on EB
[20:21:55] <jdh> how about low torque and mechanical stop
[20:22:10] <ssi> no thx
[20:22:13] <jdh> heh
[20:22:47] <ssi> the original drive did electronic spindle orient, there's no reason I can't
[20:23:08] <jdh> what was the original drive?
[20:23:15] <ssi> fanuc
[20:23:23] <ssi> with a waveshaper board and an orientation board :
[20:23:51] <zeeshan|2> hi
[20:24:03] <jdh> how about some h bridges to swap in a separate drive for orient
[20:24:25] <ssi> the land of overly complicated solutions!
[20:24:29] <jdh> it could be tiny
[20:32:10] <PCW> why not just use linuxcnc to close the position loop LinuxCNC already knows the position/index/etc
[20:32:38] <zeeshan|2> pcw
[20:32:42] <zeeshan|2> could you please recommend what mesa hardware i need
[20:32:48] <jdh> I assume that was ruled out first.
[20:32:49] <zeeshan|2> i need to feed glass scale ttl
[20:32:53] <PetefromTn_> do you think that will work over modbus?
[20:33:02] <zeeshan|2> and send analog signal to servo drives
[20:33:37] <PCW> Slowly but the VFD is not going to be fast position servo anyway
[20:33:51] <PCW> 5I25 or 6I25 and 7I77
[20:34:06] <PetefromTn_> slowly is more than fine with me.
[20:34:13] <PCW> ^^zeeshan|2^^
[20:34:19] <PetefromTn_> This machine was never a rocket quick toolchanger anyways
[20:34:36] <Tom_itx> time to beef it up!
[20:34:53] <zeeshan|2> is there any other difference other than one being pci and pci-e
[20:34:55] <PetefromTn_> what would be the method of trying to do it this way in your opinion PCW?
[20:34:57] <PCW> the pid input or possible output will need to be rate limited I expect
[20:35:03] <Tom_itx> the fadal changer was damn slow too
[20:35:16] <PCW> nope 5i25 and 6I25 are basically the same
[20:35:22] <PetefromTn_> yeah fadals and cincinattis are quite similar.
[20:36:09] <PetefromTn_> so basically some kind of programming that calls up a speed limit command and then it tries to orient below that limit?
[20:37:51] <zeeshan|2> okay sweet
[20:40:03] <PCW> I was thinking just what the orient component expects (a PID position loop)
[20:41:07] <PCW> if thats too slow another option might be a slow rotate, then command a DC brake operation when position is hit
[20:42:10] <zeeshan|2> ^ i like this idea
[20:42:14] <zeeshan|2> i was thinking of doing this for my lathe spindle
[20:42:22] <zeeshan|2> putting a pneumatic brake on it
[20:42:29] <zeeshan|2> move the spindle slowly
[20:42:33] <zeeshan|2> and slamming the brake
[20:43:57] <Tom_itx> orient doesn't use an index pulse then?
[20:46:28] <PCW> mmmm mmmm mmmm Thunk!
[20:47:02] <PCW> I was just suggesting the VFDs DC brake function
[20:47:08] <zeeshan|2> oh
[20:47:16] <zeeshan|2> you think it'll respond fast enough?
[20:47:23] <zeeshan|2> actually now that i think about it
[20:47:31] <zeeshan|2> it'll be faster than using a pneumatic brake
[20:47:53] <PCW> at a slow speed it should stop pretty fast
[20:47:58] <zeeshan|2> if the VFD brake is active and the spindle isn't spinning
[20:48:06] <zeeshan|2> and then you try to rotate the spindle by hand, will it spin?
[20:48:46] <PCW> it will have a large amount of what feels like viscous damping
[20:49:00] <zeeshan|2> see the application i was looking for
[20:49:03] <zeeshan|2> was holding the spindle still
[20:49:06] <zeeshan|2> while i broached on the lathe
[20:49:14] <zeeshan|2> or used a rotary tool to drill a bolt circle
[20:49:25] <zeeshan|2> so it has to stay pretty still during the operation
[20:49:30] <PCW> it will creep so not good for position control
[20:49:59] <PCW> but maybe good enough for tool change orient
[20:50:43] <PetefromTn_> I wonder what exactly the old spindle drive did to enable a safe reliable spindle orient positioning.
[20:51:30] <PetefromTn_> there is no mechanical mechanism in the machine to orient. It is all electronically controlled as far as I can tell.
[20:52:05] <zeeshan|2> one of the emag vlc machining cneters i used
[20:52:16] <zeeshan|2> used the eddy current brake on the spindle to position it
[20:52:25] <zeeshan|2> it would move the spindle slowly
[20:52:29] <zeeshan|2> and then brake it w/ the eddy brake
[20:52:57] <PCW> well thats what the VFD DC brake does
[20:52:59] <zeeshan|2> it needed to index to ensure the robot that was loading parts to it
[20:53:09] <zeeshan|2> lined up correctly
[20:53:14] <zeeshan|2> +/- 1-2 degrees was okay
[20:53:22] <zeeshan|2> we used tapered dowels
[20:53:29] <zeeshan|2> pcw ah okay
[21:18:25] <zeeshan|2> has anyone run a 3 phase transformer
[21:18:27] <zeeshan|2> with a vfd before?
[21:23:51] <ssi> PCW: pete's running his vfd's speed command over modbus... it looks like modbus updates at like 10Hz, is that going to be too slow to close the position loop with PID in linuxcnc?
[21:29:25] <zeeshan|2> ssi
[21:29:28] <zeeshan|2> think about that yourtself
[21:29:29] <zeeshan|2> lol
[21:29:56] <zeeshan|2> 10hz means your motor can be spinning at 600 rpm
[21:30:14] <zeeshan|2> you prolly need to bring the motor down to like 0.1hz
[21:30:31] <zeeshan|2> now help me!
[21:30:31] <zeeshan|2> :D
[21:42:49] <zeeshan|2> ssi
[21:42:50] <zeeshan|2> you there?
[21:42:56] <zeeshan|2> could you please give me the model number of the amc drives
[21:42:58] <zeeshan|2> w/ the built in supply
[21:43:01] <zeeshan|2> i lost the damn link
[22:04:36] <Jymmm> zeeshan|2: It starts with 'http' and ends with '.com' =)
[22:04:40] <zeeshan|2> haha
[22:08:40] <ssi> and the middle part is "ebay"
[22:09:02] <zeeshan|2> i'm just confused
[22:09:10] <zeeshan|2> why they specifically list some drives under brushed panel mount
[22:09:12] <zeeshan|2> and then brushless
[22:09:22] <ssi> because the brush drives only do brush motors
[22:09:32] <ssi> they're single phase drives
[22:09:36] <ssi> the brushless drives are three phase drives
[22:09:41] <zeeshan|2> the brushless are cheaper brand new
[22:09:41] <ssi> and they can do either
[22:09:43] <zeeshan|2> theyre like 300$
[22:09:45] <Jymmm> http://search.ebay.com/zeeshan-is-confused
[22:09:53] <zeeshan|2> ah
[22:09:57] <ssi> Jymmm: too many results found
[22:10:04] <zeeshan|2> when i put that part nubmer in ebay
[22:10:06] <zeeshan|2> that link doesnt pop up
[22:10:20] <ssi> http://www.ebay.com/itm/221571420371?_trksid=p2060778.m1438.l2649&ssPageName=STRK%3AMEBIDX%3AIT
[22:10:41] <ssi> http://www.ebay.com/itm/111450083423?_trksid=p2060778.m1438.l2649&ssPageName=STRK%3AMEBIDX%3AIT
[22:11:01] <ssi> the ones that have AC at the end are the self-powered ones
[22:11:24] <zeeshan|2> yea those are the ones im looking for
[22:11:29] <zeeshan|2> trying to avoid the whole seperate power supply crap
[22:11:38] <ssi> yeah me too
[22:11:41] <zeeshan|2> B25A20AC
[22:11:43] <zeeshan|2> i was searchign for that
[22:11:47] <zeeshan|2> but nothing shows up
[22:12:29] <ssi> http://www.ebay.com/itm/Advanced-Motion-Controls-BE25A20ACG-Brushless-PWM-Analog-Servo-Drive-Amplifier-2-/151440815776?
[22:12:36] <zeeshan|2> that was the link
[22:12:37] <zeeshan|2> thank you
[22:13:52] <jdh> built in power?
[22:13:56] <ssi> yes
[22:13:56] <zeeshan|2> im gonna read the manual
[22:13:58] <zeeshan|2> thanks a lot ssi
[22:14:06] <zeeshan|2> it makes more sense to get the brushless one
[22:14:13] <zeeshan|2> cause if a motor burns out inthe future
[22:14:19] <zeeshan|2> i wont be limited to just brush motors as a replacement
[22:14:50] <zeeshan|2> lol these drives are so small
[22:14:58] <zeeshan|2> my current amplifier is 12" deep by 24"x24"
[22:15:00] <zeeshan|2> !!
[22:15:44] <zeeshan|2> what do you think is a reasonable price
[22:15:46] <zeeshan|2> to list the tnc 150 controller for
[22:15:55] <zeeshan|2> theres 1 on ebay with 3 watchers
[22:15:56] <zeeshan|2> 659
[22:16:01] <zeeshan|2> but it has no control cards in it
[22:19:00] <ssi> no clue
[22:19:04] <zeeshan|2> 900
[22:19:06] <zeeshan|2> + Best offer
[22:52:33] <zeeshan|2> limit switches that have a name plate value of 240VAC
[22:52:42] <zeeshan|2> is it okay to pass 24Vdc through them
[22:52:47] <zeeshan|2> and still ensure successful operation? :D
[22:57:53] <Tom_itx> why not?
[22:58:06] <zeeshan|2> i'm not sure :)
[22:58:08] <zeeshan|2> thought i'd ask
[22:58:12] <zeeshan|2> to ensure i didnt overlook something haha
[23:19:15] <SpeedEvil> zeeshan|2: a long a it's at very low current
[23:19:26] <zeeshan|2> theyre limit switches
[23:19:37] <SpeedEvil> DC is _NOT_ ok at the same current at AC - even at low voltages
[23:19:38] <SpeedEvil> oops
[23:19:41] <SpeedEvil> I misread
[23:19:55] <zeeshan|2> youre right
[23:19:57] * SpeedEvil is having problems sleeping - with the whole 5AM thing
[23:20:00] <zeeshan|2> =D
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
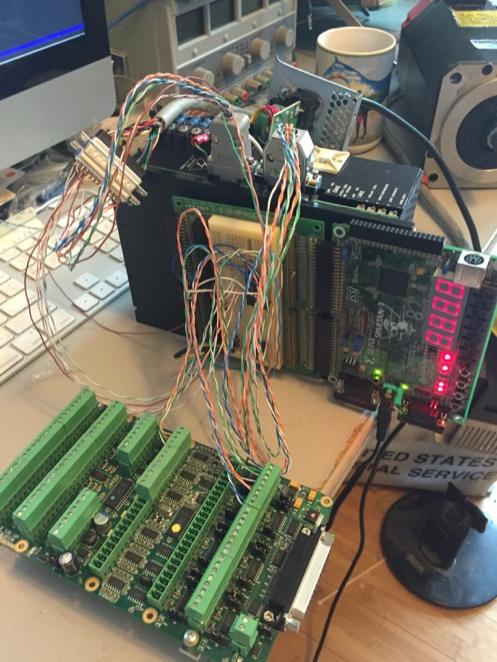{kind=link}
{kind=link}
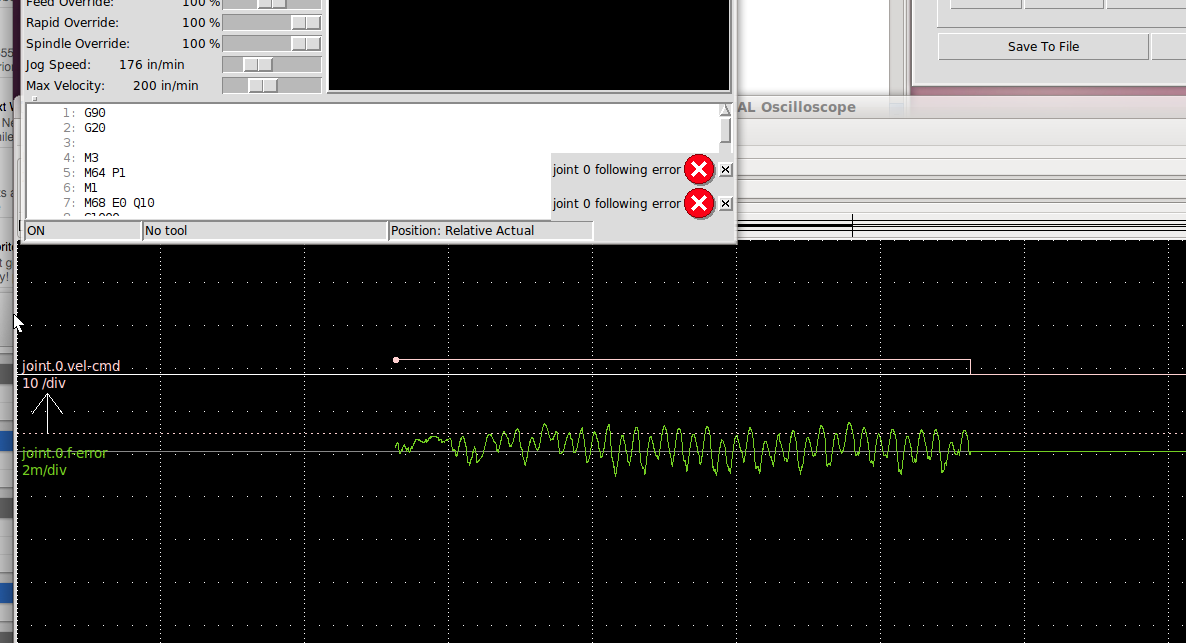{kind=link}
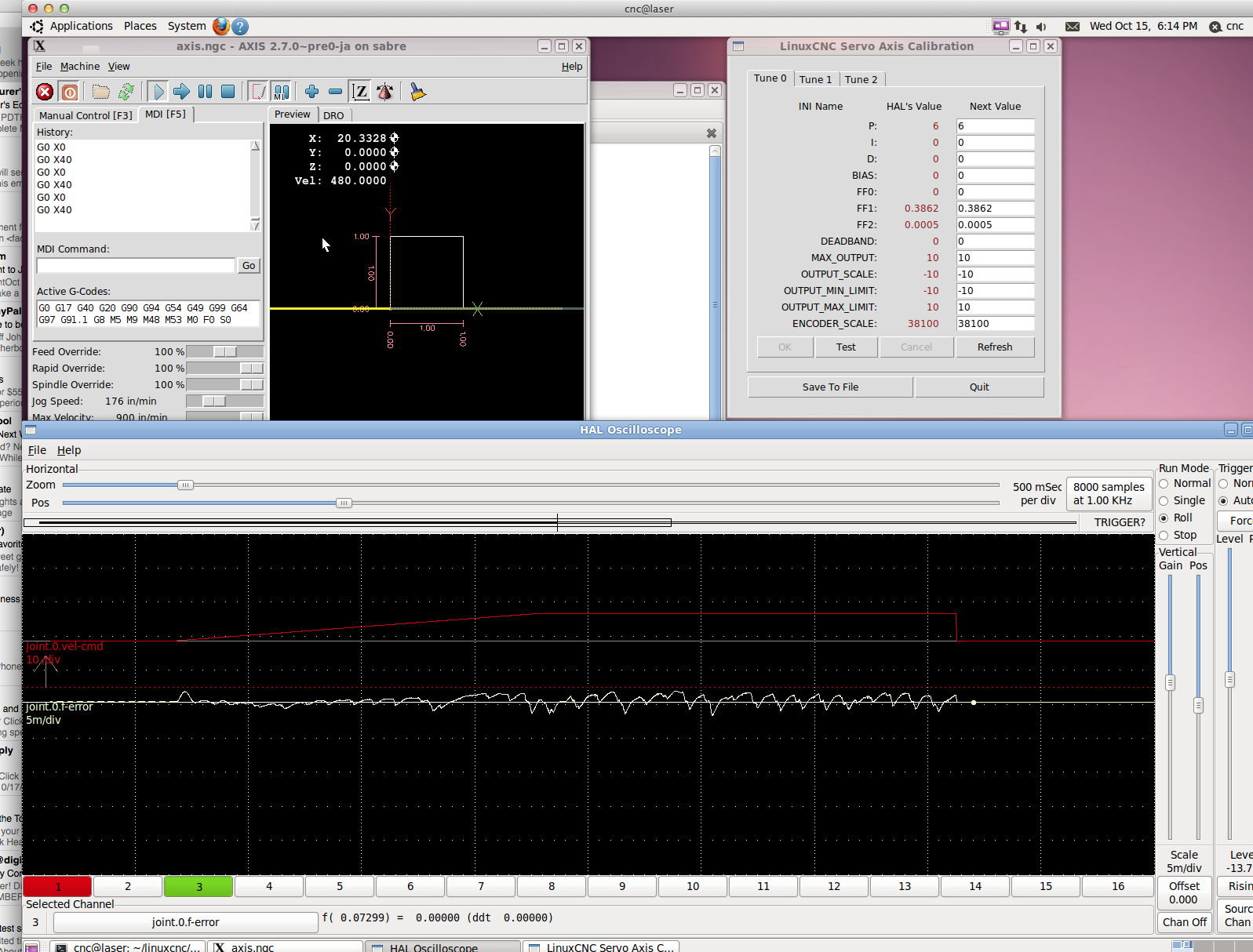{kind=link}
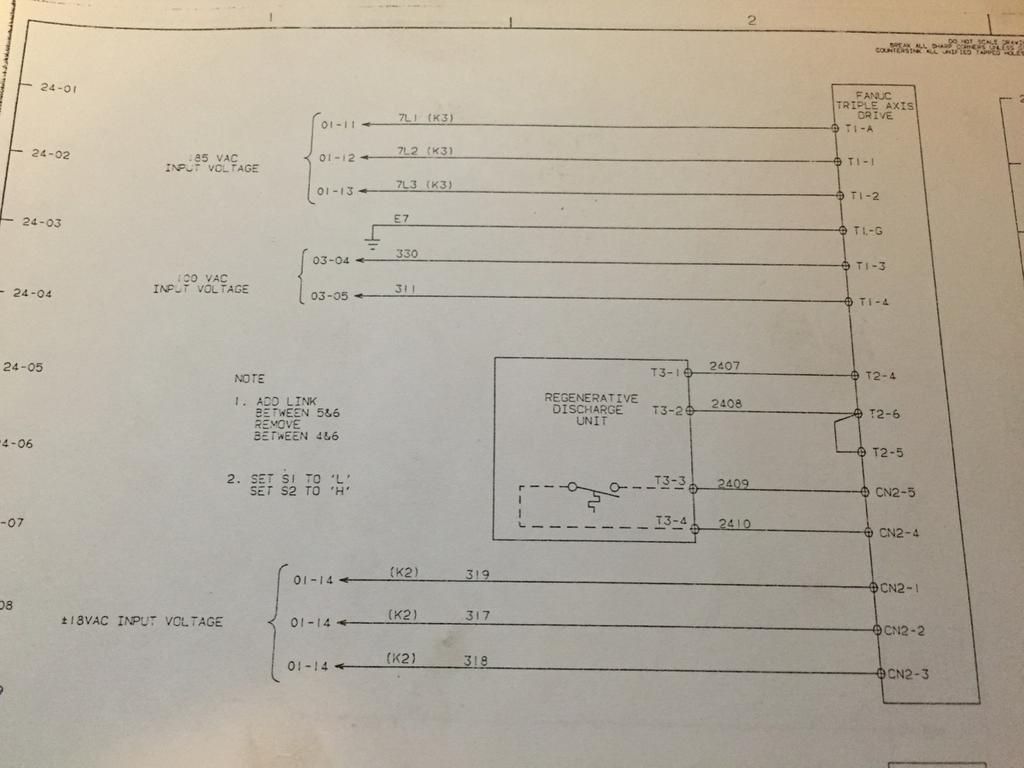{kind=link}