Back
[00:00:00] <asah> but wanted to warn you...
[00:00:12] <asah> are the motors original?
[00:00:15] <ssi> yeah
[00:00:21] <asah> ah, cool. thats easy then.
[00:00:24] <ssi> yeah
[00:00:29] <ssi> odd thing
[00:00:36] <ssi> Z has a brake (not that odd)
[00:00:38] <ssi> I think Y has a brake also
[00:00:41] <ssi> (more odd) :D
[00:00:42] <asah> I am having to replace the original DC.
[00:00:47] <asah> with my fanucs.
[00:00:50] <ssi> gotcha
[00:00:58] <ssi> the hnc has DC servos
[00:01:02] <ssi> and I'm using the original drives
[00:01:07] <ssi> so it's still all tachometers and resolvers
[00:01:16] <ssi> I'll probably run it that way as long as they live
[00:01:17] <asah> all the fanucs I have have brakes (well, I have some small ones that don't)
[00:01:25] <ssi> my X motor has no brake
[00:01:34] <asah> weird.
[00:02:01] <asah> but you surely have the braking circuits.
[00:02:11] <asah> (now in pieces on your workbench_
[00:02:12] <asah> )
[00:02:22] <ssi> the parker drives have provision for brake
[00:02:30] <asah> I used a bridge rectifier straight off of mains which worked fine.
[00:02:38] <asah> the brake is a high voltage.
[00:02:43] <asah> 90vdc
[00:02:46] <ssi> rgh
[00:02:55] <ssi> of course it is :P
[00:03:01] <asah> yes… of course.
[00:03:25] <asah> radio shack has nice small bridge rectifiers for $4
[00:03:36] <asah> but I guess you could make some with parts around the house.
[00:03:38] <asah> =)
[00:03:43] <ssi> yeah I certainly could :)
[00:03:51] <ssi> I have 1N400x diodes coming out of my ass
[00:04:04] <asah> (I spent an hour doint that.. borked the diode direction… blew them… went to radio shack.
[00:04:38] <ssi> http://media.digikey.com/photos/Tyco%20Amp%20Photos/2-5175677-4.JPG
[00:04:48] <ssi> so I think the ribbon actually wraps around the connector, and there's forks on both sides
[00:04:54] <ssi> there's two clamp covers
[00:05:01] <asah> just saying… they have some nice ones…
[00:05:25] <ssi> so yeah I think I'm going to have to re-map the pins
[00:06:51] <ssi> I'm going to include footprints for phoenix terminals as well
[00:06:58] <ssi> so if this ribbon thing really doesn't work out, I'll have a fallback
[00:38:58] <ssi> https://scontent-b-mia.xx.fbcdn.net/hphotos-xap1/t31.0-8/1781016_10100497147455022_4910394913451131564_o.jpg
[01:58:21] <MrL_> is there a way to tell linuxcnc that the low limit switch acts as home switch too
[01:58:41] <MrL_> as currently it goes to stop when homing and it hits the switch
[01:59:00] <MrL_> even tho i chose min limit + home from stepconf for the pin
[02:13:59] <Deejay> moin
[02:26:41] <ssi> https://fbcdn-sphotos-d-a.akamaihd.net/hphotos-ak-xap1/v/t1.0-9/p228x119/10665666_10100497177160492_1436966712355678495_n.jpg?oh=2e64ee08dd7f821fdd8d2870d97ef006&oe=54B0BF8A&__gda__=1421306673_0d285b5495cad6939816f2c662f9cabe
[03:08:15] <MacGalempsy> hello
[03:13:05] <MacGalempsy> anyone in here build a diy metal printer?
[04:57:45] <anomynous> hello... cnccookbook seems to have lots of material on milling but not about lathes (g-code)
[04:58:20] <anomynous> where can i find all the work cycles and common codes being used in lathes?
[05:46:48] <MacGalempsy> im pretty sure you just google g-code and lathe
[06:01:48] <MacGalempsy> JT you up yet?
[06:06:53] <jthornton> am now
[06:25:15] <anomynous> ive kind of tried that
[06:27:19] <anomynous> http://cnced.info/Info/CNCLatheGCodeList.aspx -- theres things like this. But what is exact stop for example and when do i need it?
[06:29:29] <archivist_herron> when you need a sharp corner
[06:31:30] <anomynous> sounds smart. thats what its probably for. how do i use it?
[06:34:44] <archivist_herron> !tell anonymous about
http://linuxcnc.org/docs/html/common/User_Concepts.html
[06:34:45] <the_wench> anonymous
[06:35:04] <archivist_herron> !later anonymous about
http://linuxcnc.org/docs/html/common/User_Concepts.html
[06:35:05] <the_wench> will tell anonymous when he/she joins next
[06:35:41] <Jymmm> !botsnack
[06:37:03] <archivist_herron> it used to have a !beer
[06:37:15] <archivist_herron> !beer me
[06:37:25] <Jymmm> heh
[07:15:33] <Loetmichel> the_wench: beer is I am not your waitress!
[07:15:51] <Loetmichel> oh, doent work that way, does it?
[07:16:10] <Jymmm> Sudo beer me wench!
[07:17:37] <Loetmichel> hrhr#
[07:24:08] <Tom_itx> !wench learn beer is I am not your waitress!
[07:24:08] <the_wench> I have learned beer is I am not your waitress!
[07:26:58] <Loetmichel> !beer
[07:27:09] <Loetmichel> hmm
[07:27:28] <Jymmm> !wench learn sudobeer is You want fries with that?
[07:27:28] <the_wench> I have learned sudobeer is You want fries with that?
[07:27:39] <Jymmm> !sudobeer
[07:27:54] <Loetmichel> beer
[07:27:54] <the_wench> I am not your waitress!
[07:27:58] <Loetmichel> ah
[07:28:01] <Jymmm> sudobeer
[07:28:01] <the_wench> You want fries with that?
[07:28:02] <Loetmichel> sudobeer
[07:28:02] <the_wench> You want fries with that?
[07:28:05] <Jymmm> lol
[07:28:06] <Loetmichel> harhar
[07:28:29] <Loetmichel> !wench forget beer
[07:28:33] <Loetmichel> hmm
[07:29:30] <Loetmichel> how to thell her that she should forget something?
[07:30:43] <Tom_itx> it's not a her
[07:30:53] <Tom_itx> if it were she'd never forget
[07:30:59] <Jymmm> LMAO
[07:31:14] <Jymmm> Tom_itx+++++++++++++++++++++++++++++++++++++
[07:31:41] <Jymmm> oh that's jut too classic!!!
[07:31:57] <Jymmm> beer
[07:31:57] <the_wench> I am not your waitress!
[07:32:08] <Jymmm> Well, maybe it IS a her afterall =)
[07:48:00] <Loetmichel> seems to be
[07:48:02] <Loetmichel> :-)
[08:01:31] <archivist> a serving wench is always a her
[08:51:34] <jdh> I want a slot for a 4mm bolt. What clearance size is typical for metric?
[08:52:49] <Loetmichel> 0,1mm would be sufficient
[08:53:05] <Loetmichel> but usually ione takes a 4.2mm drill for a 4mm bolt
[08:53:10] <syyl_> 4,5mm
[08:53:22] <syyl_> for toleranceclass medium
[08:54:00] <_methods> 4.5
[08:54:45] <Loetmichel> thats to wide for my taste but i am not the standard makler
[08:54:49] <Loetmichel> so go with syyl_
[08:55:01] <Loetmichel> he is beliefed to kno the standards
[08:55:05] <Loetmichel> believed
[08:55:06] <_methods> ANSI standard is 4.5mm
[08:55:15] <_methods> not sure ISO
[08:55:19] <jdh> is there a different standard for slot vs. hole?
[08:55:46] <syyl_> it seems to be the same, _methods
[08:55:53] <syyl_> good question, jdh
[08:56:12] <syyl_> we usualy go for the hole standard when making slots for screws etc
[08:56:13] <_methods> slot and hole should be the same
[08:56:33] <syyl_> as it doesnt serve any mean of alignment
[08:56:56] <jdh> there is less bolt-head to slot contact area than bolt to hole
[08:57:44] <syyl_> thats the right time for a heavy washer
[08:57:47] <syyl_> ;)
[08:58:31] <_methods> i just popped a slot into a part using solidworks hole wizard with clearance for 4mm screw
[08:58:37] <_methods> and it put it in at 4.5mm width
[08:58:43] <_methods> i mean that's not a real answer
[08:59:01] <jdh> heh, all good enough answers. I would have done 4.25mm
[08:59:34] <_methods> the only way to know for sure is to check the standard for the part you're making
[09:00:00] <_methods> check iso or ansi or whatever
[09:00:04] <syyl_> personaly i would machine it as close at possible
[09:00:12] <syyl_> and curse like hell when mounting it ;)
[09:00:32] <_methods> if it's just a cover or something hell make it sloppy
[09:00:47] <syyl_> "tight, tight, stuck, seized"
[09:00:49] <jdh> I'm not really interested in standards
[09:00:49] <_methods> but if it's a load bearing piece and i'm controlling it yeah i'd make it as close as possible
[09:00:52] <syyl_> thats my way ;)
[09:01:12] <jdh> it's holding a $4k camera
[09:01:16] <syyl_> but a 4,5mm slot is common practice
[09:01:19] <_methods> make it tight
[09:01:32] <_methods> that's a high value payload
[09:01:47] <syyl_> that hangs onto a m4 screw?
[09:01:56] <jdh> 4 of them.
[09:01:57] <syyl_> hmm.
[09:01:59] <syyl_> ah!
[09:02:14] <syyl_> dont make it to tight
[09:02:33] <jdh> it's not very heavy but has industrial ethernet and power cables coming out one end so there is some loading
[09:03:48] <syyl_> thats something i would not worry
[09:04:03] <syyl_> is there any other mean of mechanical alignment or registering
[09:04:04] <syyl_> ?
[09:04:13] <syyl_> like a key in a slot
[09:04:44] <jdh> doesn't really need it.
[09:05:21] <jdh> I could do holes, but I'd like the slot to give a little help for how the rest is mounted.
[09:05:35] <_methods> 4.5 and use washers
[09:05:45] <_methods> all bases covered
[09:05:57] <jdh> http://www.fovealmounts.com/fm3_2a_Cognex_5000.html
[09:06:14] <jdh> looks like someone makes pretty much what I want. Buying is much easier.
[09:08:09] <_methods> damn nice camera though
[09:09:38] <jdh> looks clunky though. I was thinking ~14 gauge stainless
[09:12:03] <_methods> what you using that cam for?
[09:14:49] <jdh> bar code reading (for this one)
[09:14:58] <_methods> ah nice
[09:15:00] <jdh> looks like they just used holes.
[09:15:12] <jdh> shiny barcode on shiny metal
[09:15:22] <_methods> ugh
[09:15:31] <_methods> that sounds like a nightmare
[09:15:47] <_methods> shiny seems to be a nightmare for CV stuff
[09:16:39] <jdh> yeah. good lights + filters help a lot
[09:25:09] <Loetmichel> preferably filters taht use a colour that the barcode is NOT shiny in ;-)
[09:47:20] <jdh> red with 635nm filters.
[10:18:34] <Guest10902> hi, one question: how to install camview-emc on LinuxCNC 2.6 on Debian Wheezy?
[10:32:17] <archivist> there is a wiki page on it somewhere
[10:34:11] <jdh> I would suggest you document everything you do and update teh wiki page as appropriate.
[10:34:34] <zeeshan> whos the webmaster
[10:34:50] <zeeshan> ive never made entries to a wiki page before :P
[10:35:24] <Guest10902> yes there is: "
http://psha.org.ru/b/camview-emc.html" it is a repository for ubuntu, but what du i do for Wheezy?
[10:35:44] <archivist> it will mostly be the same
[10:36:09] <CaptHindsight> http://wiki.linuxcnc.org/cgi-bin/wiki.pl?Adding_Camview use the repo for what was testing/sneezy
[10:36:13] <zeeshan> in that pic
[10:36:14] <zeeshan> for that link.
[10:36:27] <zeeshan> how do you know that the plane of the camera is parallel to the plane of that part?
[10:36:38] <CaptHindsight> nobody made a repo for Wheezy
[10:36:44] <CaptHindsight> camview has died
[10:37:15] <CaptHindsight> you don't know it's parallel
[10:38:11] <CaptHindsight> Guest10902: what do you want to do with camview?
[10:39:53] <Guest10902> I have a webcam conected on Z-Axis. I want to put 0 pos and parallel of the work pice. If camview is not working than what to use?
[10:40:46] <Guest10902> like this:
http://wiki.linuxcnc.org/uploads/gmoccapy_ntb_user_tab.png
[10:40:55] <CaptHindsight> zeeshan: the edge finder is just for finding the edges, not the surface parallel to the lens
[10:41:34] <zeeshan> CaptHindsight: if your cam is not perpendicular to the edge youre trying to find
[10:41:42] <zeeshan> you'll have parallax error
[10:41:50] <zeeshan> a circle would appear as an oval for example
[10:41:54] <CaptHindsight> yes
[10:42:13] <zeeshan> thats why im curious how people make the cam plane parallel to the surface of interest
[10:42:25] <zeeshan> is there a calibration sheet
[10:42:37] <zeeshan> where you have a buncha circles and you keep moving the camera till the ovals become circles?
[10:43:15] <zeeshan> how do you calibrate the # of pixels in your camera
[10:43:18] <jdh> if you look from teh same Z height, the offset from cam center to 0,0 would be the same.
[10:43:20] <zeeshan> to mm or inches?
[10:43:24] <archivist> go up and down and make sure the circle does not move
[10:43:26] <CaptHindsight> Guest10902: the camview project hasn't been touched in a few years, some have gotten it working, I tried to update the wiki but found that it's just no longed supported
[10:44:07] <zeeshan> archivist: that makes sense!
[10:44:25] <zeeshan> the way im tracking dots (essentially solid circles)
[10:44:36] <zeeshan> is by calibrating the camera at 4 different heights
[10:44:39] <archivist> assumptions of how a camera will work are easy to debunk
[10:44:46] <CaptHindsight> the wiki pages for it were written by a non native English speaker and they just basically posted notes and fragments of information
[10:44:51] <zeeshan> the 4 different heights allow me to figure out how much error there in
[10:44:54] <zeeshan> in camera alignment
[10:45:02] <jdh> I had camview working in axis on my old router
[10:45:19] <archivist> you need a high resolution and good optics and good calibrations
[10:45:20] <Guest10902> there is gmoccapy working with camview from Norbert....
[10:45:32] <zeeshan> yea we're using lab grade ccd cameras
[10:45:38] <zeeshan> and specific lighting
[10:45:54] <zeeshan> im tracking something thats moving so we also have to care about focal range
[10:46:06] <CaptHindsight> Guest10902: has Norbert bothered to write up a working howto?
[10:46:15] <archivist> with the average setup getting the lighting right is ....nearly impossible
[10:46:36] <zeeshan> commercial grade software
[10:46:39] <zeeshan> like ARAMIS or argus
[10:46:49] <zeeshan> have algorithms to help take care of lighting issues
[10:46:55] <zeeshan> i dont know how they do it, but it works well!
[10:47:04] <zeeshan> only problem is its a lot of $$$$$
[10:47:08] <CaptHindsight> zeeshan: it's all old stuff
[10:47:28] <CaptHindsight> it was old when I started working with it in the 80's
[10:47:52] <zeeshan> CaptHindsight: yea it is
[10:48:00] <zeeshan> photogrammetry or whatever its called
[10:48:04] <zeeshan> has been around for a century now :P
[10:48:20] <Guest10902> CaptHindsight: i dont know, i was thinking it would be easy, like the rest of the project.
[10:48:31] <CaptHindsight> OpenCV is actively supported
[10:49:07] <archivist> integrating opencv seems more sensible
[10:49:13] <CaptHindsight> Guest10902: I started to write a new howto
http://wiki.linuxcnc.org/cgi-bin/wiki.pl?Adding_Camview this is as far as I have gotten
[10:49:38] <zeeshan> how do you convert pixels to mm in camview
[10:49:44] <CaptHindsight> but since it's so broken and no longer supported is it really worth fixing?
[10:49:50] <zeeshan> do you measure a known diameter circle?
[10:49:51] <zeeshan> or something
[10:50:16] <archivist> a ruler, but then think of the lack of accuracy
[10:50:45] <Guest10902> CaptHindsight: nice work, what to do for debian Wheezy?
[10:50:54] <zeeshan> at best a ruller is is 1/64th in accuracy
[10:50:55] <zeeshan> not bad :)
[10:51:10] <archivist> some are 100th of an inch
[10:51:33] <zeeshan> i think it'd be easier just to have a known size feature
[10:51:37] <zeeshan> that youu've acurately measured
[10:51:52] <zeeshan> like the nose radius of an insert
[10:51:59] <CaptHindsight> Guest10902: it's not yet supported
[10:52:10] <archivist> does that feature have rounded edges though
[10:52:21] <zeeshan> archivist: good point
[10:52:23] <zeeshan> i'm not sure
[10:52:39] <zeeshan> for the lathe i'd probably take a round bar that was trued to the spindle
[10:52:48] <zeeshan> and also had a milled out circle in it
[10:53:09] <archivist> I am constantly messing with Z on the microscope looking for a good level to measure
[10:53:37] * zeeshan really wants a CCD cam on the lathe
[10:53:44] <zeeshan> but i have no idea how to process ccd signals
[10:53:51] <zeeshan> usually they have a seperate pci card
[10:53:54] <zeeshan> it's not like a usb cam
[10:54:06] <zeeshan> is there a cheap and easy way to hook up a CCD cam to a computer
[10:54:13] <CaptHindsight> I just got an email "Your PC Has 492 Critical Errors. Fix Now" should I download the repair? :)
[10:54:41] <zeeshan> http://www.ebay.ca/itm/Basler-L103k-1k-Monochrome-CCD-Camera-Nice-Industrial-Lab-Camera-L100-/281001345133?pt=BI_Control_Systems_PLCs&hash=item416cfc406d
[10:54:45] <zeeshan> like if you look at this camera
[10:54:48] <zeeshan> http://imagehost.vendio.com/a/7734147/aview/000_0006_985.JPG
[10:54:51] <zeeshan> look at the back side
[10:54:57] <zeeshan> its got some weird connectors.
[10:56:17] <zeeshan> CaptHindsight: im sure youve messed around with CCD cameras!
[10:56:28] <ssi> email is making me angry
[10:57:44] <CaptHindsight> zeeshan: they have all sorts of interfaces. Try to find that sensors specs
[10:58:25] <zeeshan> CaptHindsight: they dont have a standard protocol?
[10:58:39] <CaptHindsight> http://www.qmt.ch/pdf/Products/Cameras_Basler_L100.pdf
[10:58:44] <zeeshan> i'm not electronics smart
[10:58:48] <zeeshan> so i need something that i can plug in
[10:58:50] <zeeshan> and it just works :P
[11:00:42] <CaptHindsight> zeeshan: look for a frame grabber that supports that or another affordable CCD camera
[11:00:48] <archivist> "just works"tm not a chance :)
[11:01:07] <zeeshan> a frame grabber
[11:01:14] <zeeshan> is a device that processes ccd signal
[11:01:19] <zeeshan> and converts it to binary image?
[11:01:20] <zeeshan> or something
[11:01:23] <archivist> not just ccd
[11:01:32] <zeeshan> like
[11:01:38] <zeeshan> why doesnt a cmos usb cam need this frame grabber thing
[11:01:41] <zeeshan> but ccd camera does?
[11:01:47] <archivist> there are various types of frame grabbers
[11:02:15] <archivist> usb cam has it built in sort of
[11:03:42] <zeeshan> why is it not builtin
[11:03:44] <zeeshan> for ccd cams
[11:03:51] <archivist> we used to make grabbers for monitor signals so they could be printed
[11:04:27] <archivist> because the frame grabber is often doing the clever stuff too
[11:04:27] <CaptHindsight> zeeshan: it's not outputting video frames, just one line
[11:04:29] <ssi> https://pbs.twimg.com/media/BzhCJ3lIgAEHPvD.png:large
[11:04:38] <CaptHindsight> you have to supply the clocks and trigger
[11:04:38] <ssi> now if only my damn email were working so I could order 30 of these
[11:04:58] <jdh> I've replaced a bunch of CCD + FrameGrabber with these cognex cameras
[11:06:34] <zeeshan> is there a high resolution usb cam? :P
[11:07:04] <CaptHindsight> high res GBethernet or firewire
[11:07:18] <CaptHindsight> those are on ebay
[11:08:02] <zeeshan> name of one? :D
[11:08:09] <archivist> usb is crap for high speed data
[11:08:27] <zeeshan> archivist: i just want clear pictures!
[11:08:28] <zeeshan> :P
[11:08:34] <jdh> ssi: looks nice.
[11:08:51] <zeeshan> ssi what does this circuit do
[11:09:05] <ssi> zeeshan: converts the fanuc 4-bit commutation to hall
[11:09:08] <zeeshan> is it an analog to digital converter?
[11:09:14] <ssi> no, it's a digital to digital converter :)
[11:09:15] <zeeshan> so digital to analog converter
[11:09:16] <zeeshan> oh
[11:09:18] <CaptHindsight> http://www.ebay.com/itm/Allied-Vision-Technologies-Prosilica-GC1350-CIV-Monochrome-GigE-Vision-Camera-/321546084523 for instance
[11:09:30] <ssi> zeeshan:
https://www.youtube.com/watch?v=gUD5vjv4dZE
[11:09:36] <zeeshan> ssi howd you know where to put the capacitors? :D
[11:09:40] <zeeshan> or resistors and shit like that
[11:09:46] <zeeshan> that stuff always confuses me :P
[11:10:06] <jdh> I have some mass-spec's with DB25's for the digital IO. Maint. guy put a replacement one in and used a null modem adapter to fix the genders
[11:10:07] <zeeshan> nig youre fast
[11:10:12] <zeeshan> you got that stuff working quick
[11:10:49] <ssi> jdh: lolololol
[11:10:51] <zeeshan> CaptHindsight: thats a big expensive!
[11:11:04] <zeeshan> *bit
[11:11:19] <jdh> it didn't use much IO, but did use pins 2&3
[11:11:28] <zeeshan> so that plugs into an ethernet port
[11:11:30] <zeeshan> on your computer?
[11:11:39] <CaptHindsight> zeeshan: yes
[11:11:47] <zeeshan> nice
[11:11:55] <ssi> zeeshan: it really wasn't hard to do, it was mostly the inertia of getting all the tools set up
[11:11:59] <zeeshan> i think i have a free firewire port
[11:12:05] <ssi> for instance the four hours it took me to install webpack :P
[11:12:10] <jdh> heh
[11:12:11] <zeeshan> ssi ah
[11:12:14] <ssi> and the hour I spent searching for my fpga devkit
[11:12:29] <jdh> use use weback for teh cpld also?
[11:12:35] <ssi> yeah
[11:12:42] <zeeshan> i dont know what you're talking about
[11:12:42] <ssi> I haven't written the cpld firmware yet
[11:12:44] <zeeshan> but cool :)
[11:12:46] <CaptHindsight> http://www.ebay.com/itm/Sony-XCD-SX900-Digital-High-Resolution-Firewire-Camera-With-Lens-/151390785968
[11:12:58] <zeeshan> CaptHindsight: now we're talking!
[11:12:59] <zeeshan> :D
[11:13:16] <zeeshan> whats that trig in port
[11:13:36] <jdh> it triggers
[11:13:40] <zeeshan> this camera definitely fell into the ocean
[11:13:41] <ssi> zeeshan: now you see why I was unwilling to spend $450 on those converters
[11:13:41] <zeeshan> or something
[11:13:48] <zeeshan> ssi yes
[11:13:59] <zeeshan> clearly u have the knowledge
[11:14:05] <zeeshan> to know that it's dirt cheap to make
[11:14:31] <zeeshan> for someone like me
[11:14:40] <zeeshan> i need a box that converts signal a to b for me :P
[11:14:52] <ssi> boards are $140 for 5 day turn, $184 for 3 day turn
[11:14:52] <zeeshan> i bought this thing called the "dakota digital box"
[11:14:58] <ssi> for 30 boards
[11:14:58] <zeeshan> which converts sinwave pulses
[11:15:01] <zeeshan> to digital pulses
[11:15:09] <zeeshan> and amplifies the # of pulses
[11:15:15] <CaptHindsight> http://www.3ders.org/articles/20141009-german-man-3d-printed-a-machine-gun-that-folds-shoots-paper-airplanes.html
[11:15:16] <ssi> um, wat?
[11:15:21] <zeeshan> to work with my tachometer
[11:15:30] <zeeshan> speed sensor outputs sine wave
[11:15:41] <zeeshan> tachometer requires square wave
[11:15:51] <ssi> that's easy
[11:15:56] <ssi> schmitt trigger
[11:15:57] <zeeshan> but the sine wave frequency isn't equal to the tachometer frequyency
[11:16:11] <ssi> tach need to be faster or slower
[11:16:14] <CaptHindsight> http://www.youtube.com/watch?v=J7K91g8yG_w
[11:16:17] <zeeshan> yea
[11:16:18] <zeeshan> faster
[11:17:03] <zeeshan> the box costs like 80$
[11:17:04] <CaptHindsight> automated origami
[11:17:05] <ssi> could A/D the sinewave and then output one of the lower order bits, whichever gives you the right multiple
[11:17:06] <zeeshan> so i just bought it :P
[11:17:21] <ssi> yeah at $80 that's worthwhile
[11:17:32] <ssi> if I could have spent $80 on one board which'd do what I needed, I would have
[11:17:40] <ssi> but instead they were $150. Each. Per axis.
[11:17:46] <zeeshan> fak dat
[11:17:53] <ssi> exactly
[11:17:55] <zeeshan> how much is your board
[11:17:58] <zeeshan> to produce
[11:18:05] <ssi> I should be able to build thirty of them for about $250
[11:18:10] <zeeshan> haha
[11:18:17] <ssi> haven't really figured the cost of all the components
[11:18:24] <ssi> but the boards are $140 or $184 if I rush them
[11:18:29] <ssi> for thirty
[11:18:32] <ssi> most of that is shipping
[11:18:34] <ssi> $50 shipping
[11:22:10] <zeeshan> http://www.gardnerauctions.com/view_auction.php?auction_ID=625
[11:22:13] <zeeshan> im thinking of going to this
[11:22:37] <zeeshan> is there a buyers premium
[11:22:39] <zeeshan> at these things?
[11:22:44] <ssi> probably
[11:23:02] <zeeshan> how do you find out
[11:23:07] <ssi> dunno
[11:23:20] <zeeshan> i want that rockwell hardness tester
[11:23:21] <zeeshan> lol
[11:23:40] <jdh> ask them. Here it is usually 15%
[11:23:50] <zeeshan> and on top of that
[11:23:51] <zeeshan> you pay tax?
[11:24:59] <archivist> depends
[11:25:07] <archivist> see terms and conditions
[11:26:40] <archivist> that looks like a good one to visit, you will need a truck
[11:26:47] <zeeshan> not planning to buy big shit
[11:26:57] <zeeshan> mainly interested in the rockwell tester
[11:26:59] <zeeshan> and inspection
[11:27:02] <zeeshan> and some tooling
[11:27:40] <archivist> looks like some is just lumped in bigger lots
[11:28:22] <archivist> like this cabinet
http://www.gardnerauctions.com/auction_image.php?image_ID=38340
[11:28:37] <zeeshan> thats the cabinet i was eyeing
[11:28:38] <zeeshan> :/
[11:29:00] <archivist> fight!
[11:29:35] <CaptHindsight> how many Rockwells does it measure?
[11:29:42] <ssi> ALL THE ROCKWELLS
[11:29:48] <zeeshan> http://www.gardnerauctions.com/auction_image.php?image_ID=38331
[11:29:49] <CaptHindsight> kewl
[11:29:51] <zeeshan> that was the other cabinet
[11:29:59] <zeeshan> http://www.gardnerauctions.com/auction_image.php?image_ID=38335
[11:30:00] <zeeshan> another
[11:30:11] <zeeshan> http://www.gardnerauctions.com/auction_image.php?image_ID=38344
[11:30:19] <archivist> the mechanics tool chest may be full too
[11:30:20] <zeeshan> if i can get any of those
[11:30:21] <zeeshan> id be happy
[11:30:34] <zeeshan> http://www.gardnerauctions.com/auction_image.php?image_ID=38359
[11:30:39] <zeeshan> this one looks like where they store their carbide inserts
[11:31:29] <archivist> even scrap carbide is worth money so the local scrap dealer may fight you for that
[11:31:54] <zeeshan> lol
[11:33:51] <archivist> once I won a pallet and realised how heavy it was, sold it to the scrappy at the auction after
[11:34:10] <ssi> hah
[11:34:35] <zeeshan> rofl
[11:37:06] <ssi> hey pete
[11:37:17] <PetefromTn_> hey
[11:37:24] <ssi> what's happening
[11:37:27] <archivist> CaptHindsight, a toy for you
http://www.ebay.co.uk/itm/Tencor-P-2-Automated-Long-Scan-Profiler-Profilometer-KLA-P2-/141433602617
[11:38:23] <PetefromTn_> just removed the regulator and water trap from the machine and ordered a new one online. In the mean time I fixtured up some fittings to get the air leak from that old assembly gone.... Nice to NOT hear the compressor running every ten minutes or so...
[11:38:33] <ssi> heheh
[11:38:44] <CaptHindsight> Features: Measurement of vertical features ranging from under 100 Å (0.4 µin) to approximately 0.3 mm (11 mils), with a vertical resolution of 1 or 25 Å (0.004 or 0.1 µin).
[11:39:22] <ssi> PetefromTn_:
https://pbs.twimg.com/media/BzhCJ3lIgAEHPvD.png:large
[11:39:45] <PetefromTn_> neat
[11:39:51] <PetefromTn_> does it work?
[11:40:09] <CaptHindsight> zeeshan: that would be able to accurately measure the deflection of your parts
[11:40:09] <ssi> well it doesn't exist in the corporeal world yet
[11:40:12] <ssi> but I imagine it will :)
[11:40:17] <ssi> my breadboard prototype works
[11:40:22] <ssi> https://www.youtube.com/watch?v=gUD5vjv4dZE
[11:40:23] <PetefromTn_> imagination is good...
[11:40:58] <ssi> with the converter, I was able to get the gemini drive to recognize the hall states as valid
[11:41:02] <CaptHindsight> ssi: did you find one off the shelf that was a few hundred $?
[11:41:05] <ssi> and enable the drive in position mode
[11:41:18] <ssi> CaptHindsight: yea pico makes one that's $150 per axis, but I'm not paying it
[11:42:59] <PetefromTn_> well I am glad you were able to get the motors to work with the drives you had on hand. At least you can get the basic machine working sooner.
[11:43:17] <ssi> I'm still a bit stuck on tuning parameters
[11:43:27] <ssi> I may not really NEED them though
[11:43:46] <ssi> the gemini manual takes you through this process of putting the drive in position mode and commanding 1 revolution
[11:43:51] <PetefromTn_> the sooner you get that basic machine working and running the sooner you will be able to turn your considerable electronics and programming skills to bear against this orient problem we are having LOL...
[11:43:55] <ssi> that's not working because it's not self-tuned for these motors
[11:44:56] <pcw_home_> orient should be pretty straight forward
[11:45:07] <ssi> I think it will
[11:45:14] <ssi> pete just needs to wire it up and try it :)
[11:45:22] <ssi> I don't even have my VFD yet
[11:45:27] <PetefromTn_> it makes me smile to hear you both say that... really it does. ;)
[11:45:33] <pcw_home_> its not like you need any holding torque
[11:45:40] <ssi> no
[11:45:53] <ssi> and I'm not sure what the angular tolerance is like for the toolchange
[11:45:59] <PetefromTn_> well enough to keep it straight when the toolchanger fingers engage the tool.
[11:46:00] <pcw_home_> so a VFD shoud work fine (if a bit slow)
[11:46:43] <PetefromTn_> that is apparently how it worked before... just with the resolver instead of the encoder.
[11:46:59] <ssi> mine's encoder
[11:47:09] <pcw_home_> VFDs are not good at dynamic holding torque so none must be required
[11:47:11] <ssi> but the fanuc drive did the spindle orient all by itself
[11:47:37] <PetefromTn_> so did the Control Techniques drive
[11:48:03] <ssi> yeah
[11:48:17] <ssi> so the biggest WJ200 is the -150LF
[11:48:27] <ssi> it's 20HP VT, 25HP CT
[11:48:29] <ssi> I hope that's big enough
[11:48:47] <ssi> er 20CT, 25VT
[11:49:13] <ssi> the spindle is 12hp continuous, 15hp MTD
[11:49:30] <PetefromTn_> probably would be fine...
[11:50:07] <ssi> probably
[11:50:15] <ssi> I don't think I'm gonna have enough power to see 15hp anyway :P
[11:51:42] <zeeshan> i tried to drive a 3hp motor with a 1hp drive
[11:51:48] <zeeshan> kept faulting out lol
[11:51:50] <ssi> yeah
[11:52:01] <ssi> I'm running my 290W coolant pump with a 200W 1/4hp vfd
[11:52:05] <ssi> it runs for awhile, but eventually faults
[11:52:12] <ssi> doesn't help that the rear bearing in the pump is completely frozen :P
[11:52:49] <zeeshan> hehe
[11:52:59] <zeeshan> thats fairly easy to replace
[11:53:21] <ssi> yeah
[11:53:33] <ssi> I need to measure the flange on the pump too and lasercut a gasket for it
[11:53:39] <ssi> I have some high durometer silicone sheet here
[11:53:39] <zeeshan> why
[11:53:45] <zeeshan> make it by hand
[11:53:48] <ssi> screw that
[11:53:49] <zeeshan> takers like 2 min
[11:53:53] <ssi> I don't build robots to make things by hand
[11:54:03] <zeeshan> just need a hammer
[11:54:10] <zeeshan> and some gasket material
[11:54:40] <ssi> I like my way better :P
[11:54:54] <zeeshan> your way is slower!
[11:54:59] <ssi> mayb
[11:55:03] <ssi> but it'll look nicer when it's done :)
[11:55:09] <zeeshan> no it wont
[11:55:24] <zeeshan> the hammer and gasket material method
[11:55:29] <zeeshan> makes an exact replica
[11:55:41] <zeeshan> !
[11:55:53] <zeeshan> anyway im lazy too
[11:56:09] <zeeshan> i'd make a die for it and stamp it out
[11:56:14] <zeeshan> :D
[11:56:32] <zeeshan> fak i have so much crap to do
[11:56:38] <zeeshan> i dojnt know why im procatinating
[11:56:49] <ssi> go do work
[11:56:55] <jdh> work.
[11:58:15] <zeeshan> 10 min
[12:18:14] <ssi> ok pcb order submitted
[13:09:14] <ssi> Subtotal$19.59
[13:09:24] <ssi> cost for the parts for three converters, not including passives
[13:09:59] <Connor> ssi You sure you found the right connector ? :)
[13:10:07] <Connor> and got the pinout correct?
[13:10:09] <ssi> that's not including the centronics connector either
[13:10:10] <ssi> heh
[13:10:15] <ssi> I'm fairly sure
[13:10:18] <ssi> but I gave myself an out
[13:10:24] <Connor> how so ?
[13:10:43] <ssi> I included footprints for phoenix blocks for all signals
[13:10:51] <ssi> so if the connectors don't work out i can point-to-point wire everything
[13:11:34] <Connor> Ah. How are you going to point-to-point wire it to the driver ?
[13:11:42] <ssi> soldercup connectors
[13:11:43] <Connor> does it expose those outside of the connector ?
[13:11:44] <ssi> which I have already
[13:12:12] <Connor> okay. So your plugging these into the drivers then.. as a mini breakout ?
[13:13:00] <ssi> yeah more or less
[13:13:11] <Connor> Couldn't you have just used any type of connector on your side.. and used the funky connector on the drive side and used cables ?
[13:13:31] <ssi> that's what I did
[13:13:36] <ssi> http://www.digikey.com/product-detail/en/1658621-6/AKC26H-ND/825404
[13:13:48] <ssi> http://www.digikey.com/scripts/DkSearch/dksus.dll?Detail&itemSeq=158867181&uq=635484560617696915
[13:13:56] <ssi> ribbon cable between them
[13:14:04] <Connor> that last one didn't work.
[13:14:36] <ssi> http://www.digikey.com/product-detail/en/2-5175677-4/A32495-ND/949855
[13:14:46] <Connor> Ahh.. okay.
[13:15:27] <Connor> so, If you muck up and didn't get the correct connector there.. you can make a custom cable and use the headers or the blocks..
[13:15:31] <ssi> yes
[13:15:46] <ssi> I always leave myself an out :P
[13:15:58] <Connor> Well.. using the headers would still be okay..
[13:16:22] <Connor> you just might not have the pins and crimper and connectors..
[13:16:35] <ssi> I think it's gonna work out with the ribbon cable
[13:16:36] <Connor> I have 1x1 --- 1x8's I think.
[13:16:42] <ssi> and it's DB25 on the other side
[13:16:43] <Connor> and some 2x6's
[13:16:56] <ssi> so the feedback cable coming from the motor will get terminated with DB25, and plug directly into this board
[13:17:01] <ssi> should work out pretty nicely
[13:17:09] <Connor> Cool
[13:17:34] <Connor> and that was the only thing needed translating was grey code to a hall-effect pattern ?
[13:17:43] <ssi> yep
[13:18:02] <Connor> WTF did that other guys board do then? It had way more inputs and outputs..
[13:18:28] <ssi> it takes the encoder signals in and repeats them
[13:18:32] <ssi> mine just passes them through passively
[13:18:37] <ssi> I think his actually runs through the cpld
[13:18:42] <ssi> I considered doing that as well, but it's not necessary
[13:18:47] <ssi> and i didn't want to have to condition all those signals
[13:18:52] <Connor> Why would you want to do that ?
[13:18:59] <Connor> run them through the cpld ?
[13:19:01] <ssi> I dunno
[13:19:12] <ssi> you might could get fancy and use the encoder to try to more accurately guess the hall state
[13:19:16] <ssi> but that's stupid
[13:19:29] <ssi> cause once the encoder passes the index mark, the drive stops using the hall and starts using the encoder
[13:20:17] <Connor> His looked overly complicated..
[13:21:11] <ssi> mine's gonna be nicer anyway
[13:21:15] <ssi> cause of the wiring features
[13:21:47] <ssi> $72 gets me all the components to build three of them, including stuff to make the ribbon cables
[13:21:55] <ssi> and $50 of that is the ribbon cable parts!
[13:22:12] <ssi> that centronics connector is the biggest problem in all this
[13:22:18] <ssi> and i'd need it even if I used his boards
[13:22:21] <ssi> they're like $18 apiece
[13:22:52] <Connor> yea. Maybe you can open-source the board.. or heck.. even make a few..
[13:22:58] <Connor> wonder how many people need them ?
[13:23:11] <ssi> I ordered 30 boards
[13:23:18] <ssi> so if other folks need them I'll sell them for a reasonable price
[13:24:06] <Connor> That guy has a resolver converter.
[13:24:30] <ssi> yeah I know
[13:24:32] <ssi> also overpriced
[13:24:54] <ssi> mesa sells a four axis servo interface with resolver converters for each axis for $189
[13:25:01] <ssi> pico sells one resolver converter for $150
[13:25:21] <ssi> I'm sure he makes plenty of money on the mach3 crowd
[13:25:24] <ssi> but I'm just not with it
[13:25:29] <Connor> yea. I was thinking of Pete and his spindle when it used a resolver...
[13:26:40] <Connor> I was originally going to build a index-mask circuit for pete so he didn't have to use custom Firmware.
[13:27:15] <ssi> custom firmware was easy enough
[13:27:30] <ssi> I wonder how mine's gonna work
[13:27:37] <ssi> mine has an encoder I'm pretty sure
[13:27:44] <Connor> yea. If he ever wants to use the internal connector in the 5i25, we can change it.
[13:27:59] <Connor> on the spindle or motor? that's the big question
[13:28:06] <ssi> not sure!
[13:28:10] <ssi> tonight I'll pull the spindle cover
[13:28:22] <ssi> those three extra wires btw look like they're for a 3 phase fan heh
[13:28:33] <ssi> it'd be annoying if I have to get a third VFD to run that fan!
[13:28:40] <ssi> I guess I can probably do start caps
[13:29:03] <Connor> Yea, Pete's had a fan too as you remember..
[13:29:25] <ssi> yeah
[13:29:27] <ssi> was it 3ph?
[13:29:37] <jdh> fan for spindle cooling?
[13:29:40] <ssi> yeah
[13:29:42] <Connor> yea
[13:29:51] <ssi> my machine has a spindle chiller too
[13:29:53] <jdh> guess the motor is simpler and cheaper
[13:30:25] <ssi> and the 8000rpm 12hp spindle, wee
[13:30:55] <jdh> heh, that could do some damage
[13:31:26] <Connor> http://pico-systems.com/pwmservo.html
[13:31:33] <Connor> Is that just a high end H-Bridge ?
[13:31:49] <ssi> yeah
[13:31:52] <ssi> for dc servos
[13:32:03] <Connor> Hmmm..
[13:32:27] <ssi> crazy thing is he charges less for that thing than he does for the stupid commutation converter
[13:33:04] <Connor> Wonder how that would do for my spindle speed controller.. I'm currently using a SCR
[13:33:15] <ssi> mesa probably makes something similar
[13:33:40] <Connor> Would probably get faster reverse.
[13:34:25] <ssi> for faster reverse you really need something that can do regenerative braking
[13:34:50] <Connor> Mine has a reverse, and a breaking resistor..
[13:34:54] <Connor> but, it's not exactly fast.
[13:36:10] <Connor> Not seeing anything on mesa that could handle my spindle motor.
[13:38:32] <ssi> The 7I29 is 2 channel H-bridge motor drivers for the 4I27 or FPGA based motor controller cards. The 7I29 connects to the motor controller card with a 50 conductor flat cable and have screw terminals for motor power and motor connections. Two 7I29s can share a 4 Axis 50 conductor cable to FPGA controller. Encoder and index input connectors are also made available on the 7I29. Encoder inputs can be single ended or differential. The 7I29 has overcurrent
[13:39:47] <jdh> ssi: does it look like his reads the commutation track, or just does it based on the encoder?
[13:39:56] <ssi> it reads the commutation track
[13:40:00] <ssi> I don't think it uses the encoder at all
[13:40:07] <ssi> but he takes it into the cpld and regenerates it on the other side
[13:40:15] <ssi> honestly it's dirt simple
[13:40:28] <ssi> the commutation track tells you at steady state what the rotor angle is within 22.5 degrees
[13:40:44] <ssi> a hall effect motor tells you at steady state what the rotor angle is within 30 degrees
[13:40:51] <ssi> just have to have a lookup table to convert them
[13:40:52] <jdh> Otherwise there is no commutation output until the encoder has been turned manually to the index location.
[13:40:56] <ssi> it's not rocket surgery
[13:41:42] <ssi> anyway I gotta go get lunch
[13:41:43] <ssi> bbiab
[13:43:10] <jdh> yours is a serial encoder?
[13:43:21] <ssi> no
[13:43:29] <jdh> http://pico-systems.com/fanser_pins.html
[13:43:50] <ssi> serial encoders are very different
[13:45:45] <jdh> oh, wrong product
[13:47:58] <jdh> wonder how many of those he sells.
[13:54:59] <jdh> he has some pretty cool historical computer stuff on his site.
[14:01:50] <CaptHindsight> "took the inner code of NASA's mini-VICAR image processing package and modified it to use ordinary VMS files (the original mini-VICAR on PDP-11 used preallocated file blocks with their own file system taking up a whole disk for performance reasons"
http://www-mipl.jpl.nasa.gov/external/vicar.html
[14:02:29] <CaptHindsight> in development since, 1966 it should good enough for Linuxcnc :)
[14:04:53] <Jymmm> do you think it would be "safe" to store can of butane in the trunk of a car?
http://ep.yimg.com/ty/cdn/yhst-15407588900917/butane3pack.jpg
[14:05:07] <Jymmm> 8ounce can
[14:05:27] <jdh> sure, I'd store those in your trunk.
[14:06:23] <Jymmm> and in yours?
[14:06:42] <jdh> probably.
[14:07:02] <MrSunshine> anyone know a good way to do torch touch off with hf tourches on plasma? =)
[14:08:57] <_methods> you have ATC?
[14:09:46] <_methods> if you don't you'll have to use a feeler guage for the correct standoff dist for the material you're cutting
[14:11:02] <MrSunshine> plasma ... touch off =)
[14:11:17] <MrSunshine> it needs to touch off to plate each time it moves .. as plates etc can warp
[14:11:27] <_methods> oh thx for that tip
[14:13:08] <_methods> some people don't have the luxury of ATHC
[14:13:14] <_methods> automatic torch height control
[14:13:19] <CaptHindsight> sounds like a probe is required to sense the distance from the tip to the material
[14:13:33] <_methods> most ATHC rigs sense the metal
[14:14:01] <_methods> you change voltage for the sensor to get your height right
[14:14:12] <_methods> depends on material, torch, nozzle,
[14:14:16] <_methods> yadda yadda
[14:14:36] <_methods> and the ATHC
[14:14:47] <_methods> unless you're goin ghetto with follower
[14:15:22] <_methods> spring loaded z with an adjustable follower cone
[14:15:51] <_methods> poor mans height control
[14:15:52] <CaptHindsight> http://www.candcnc.com/LCTHC.html
[14:15:57] <_methods> yeah
[14:16:06] <CaptHindsight> http://wiki.linuxcnc.org/cgi-bin/wiki.pl?GantryPlasmaMachine
[14:16:57] <MrSunshine> he has automatic height control, but the height needs to be set to a specific height before the arc can evern fire so the controller takes over
[14:17:22] <_methods> yep
[14:17:35] <_methods> use a feeler gauge if it's being picky
[14:17:39] <MrSunshine> problem with the touch of is that he has a high frequency plasma thingie .. and that aparently has some issues with just connecting the tip to a relay :P
[14:17:52] <MrSunshine> _methods, he cant do that for every single freakin ole!
[14:17:53] <MrSunshine> hole
[14:17:57] <MrSunshine> in a sheet
[14:18:02] <_methods> after the first hole it should be fine
[14:18:06] <MrSunshine> hence AUTOMATIC TOUCH OFF
[14:18:09] <MrSunshine> no
[14:18:09] <_methods> wow
[14:18:12] <MrSunshine> as plates WARPS =)
[14:18:14] <_methods> ok i'm out of this
[14:18:23] <MrSunshine> seems i cant pund it into you =)
[14:18:27] <MrSunshine> pound :P
[14:18:40] <MrSunshine> plates warp by heat .. so no he wont be set after just the first pierce
[14:18:44] <_methods> wow
[14:18:56] <PetefromTn_> LOL
[14:19:20] <MrSunshine> and in this case .. mach3 loses track of position as the height controller takes ove the control of the stepper ... and the control software knows nothing about what height it ends up at =)
[14:19:27] <_methods> well that's your problem
[14:19:29] <_methods> mach 3
[14:19:34] <_methods> and this is linuxcnc
[14:19:43] <MrSunshine> sigh
[14:19:44] <_methods> you're in the wrong room lol
[14:19:49] * MrSunshine kicks _methods int he face
[14:20:11] <PetefromTn_> mach3 is that some kinda venereal disease?
[14:20:12] <MrSunshine> it doesnt mater if its linuxcnc or mach3 int his case as linuxcnc would not know the z height position either
[14:20:26] <_methods> yep you're fucked
[14:20:27] <MrSunshine> as ther eis no feedback back to the controlling pc
[14:20:39] <_methods> you can use a follower cone then
[14:20:47] <MrSunshine> so it nees to touch off for each pierce it needs to make before it turns on the plasma .. .and its an electrical issue, not a software issue =)
[14:21:46] <MrSunshine> need help with the path from the tip (touch off) to the breakout board ... not anything else ... electricaly so it wont send the plasma arc voltage etc into the bob :P
[14:22:20] <MrSunshine> aparently for non hf plasmas its a non issue
[14:22:34] <MrSunshine> but hf plasmas has its own problems .. with arcings over relays etc
[14:22:54] <_methods> proper grounding should take care of that
[14:22:57] <_methods> but whatever
[14:24:45] <_methods> A typical plasma system height control has a reference voltage that is set by the machine operator. This voltage is provided by the plasma torch manufacturer and is different for every type of material, every thickness, and every plasma process power level.
[14:26:07] <PetefromTn_> sounds freakin' complicated
[14:26:10] <_methods> most of them will have a "slow down height" that you can adjust
[14:26:12] <MrSunshine> yes .. the height control system works ... thats not the problem .. its the initial touch off im talkinga bout ... and that is not a problem either realy ... problem is when the torch fires ... if using the tip of the plasma the arc voltage can go into the touch off ciruit and arc all over the place =)
[14:26:36] <MrSunshine> forget the torch height control .. its touch off im talking about ... =)
[14:26:42] <_methods> the tip should never touch
[14:26:51] <MrSunshine> sigh ...
[14:27:21] <_methods> the plate detection should pick it up before it ever touches
[14:27:33] <_methods> old plasma tables use and arm that would swing down
[14:27:46] <_methods> and touch off a known dist then move down a known dist
[14:28:27] <MrSunshine> https://www.youtube.com/watch?v=bbi55QfBW24
[14:28:37] <MrSunshine> there, the first is how it acts now ... the 2nd part is how it should do
[14:29:20] <MrSunshine> the old system sounds like it could work i guess, have some kind of sensor that is solenoid activated
[14:29:28] <MrSunshine> to get rid of the hf problem
[14:29:51] <_methods> yes
[14:30:41] <MrSunshine> as i said .. with plasmas that does nto have hf you can use 2 relays fromw hat i find .. but when its a hf thingie problems with arcing in relays etc apears ...
[14:33:07] <_methods> well if anyone in here is going to be able to help you they're probably going to need more info
[14:33:17] <_methods> like what power pack you're using, what ATHC
[14:33:43] <_methods> maybe even what plasma table?
[14:34:05] <_methods> hf thingie problems is kinda vague
[15:08:17] <Hawku> cox: just tested 3000mm/min on my 6040. i don't know how it isn't missing steps with 5µs STEP 10µs DIR settings
[15:10:20] <cox> Hawku: Nice, what kind of acceleration and max speed settings you use?
[15:10:39] <Hawku> 150mm acceleration and 3000mm/min
[15:12:07] <cox> wow, wish it was me, managed however to get to 1500mm/min by tweeking a bit, but I do not trust this speed sounds terrible
[15:13:34] <cox> What kind of spindle control you got, is it connected and controled by LinuxCNC
[15:13:55] <Hawku> watercooled 800W + chinese VFD
[15:14:42] <Hawku> i could use PWM control, but i'll wait for my adapter to arrive rs485
[15:14:54] <Hawku> ...
[15:14:58] <Hawku> wait for my rs485 adapter
[15:15:14] <jdh> I have an adapter, haven't tried it yet
[15:15:32] <jdh> and I would really prefer discrete IO for on/off
[15:15:38] <Hawku> i compiled the hy_vfd and that looksOK
[15:16:14] <Hawku> jdh: it is possible to configure the VFD to have start and stop pins
[15:16:28] <jdh> that is my plan
[15:16:38] <jdh> but, my BOB doesn't have any extra headers
[15:16:39] <Hawku> default FOR and RESET pins are start and stop
[15:16:53] <Hawku> for chinese vfd
[15:16:57] <cox> My vfd is D5M, I have it conected 0-10 V but i am also looking at modbus control. Have not found any apesial driver for the D5M
[15:17:36] <jdh> I have to solder in a new header or swap out the breakout board
[15:17:51] <cox> Any solid lead on the perfect rs485 adapter usb, serial ?
[15:17:55] <Hawku> you have "YooCNC" box?
[15:18:07] <Hawku> the black one
[15:18:14] <jdh> mine is the black YooCNC with discrete drivers
[15:18:21] <jdh> and 80mm, 1.5kw spindle
[15:21:03] <kfoltman> jdh: water or air cooled? is it any good?
[15:21:55] <Hawku> ER16 would have been nice, but all of the 80mm 6040 packages do have that black box
[15:22:59] <cox> Hawku: witch rs485 adapter did you order
[15:24:54] <Hawku> cox:
http://www.ebay.com/itm/321449958851 and
http://www.ebay.com/itm/301192527500
[15:26:45] <cox> Hawku: have you been recomended it,? I was looking at it but I am not shure if i should have isolated instead
[15:27:51] <Hawku> i think that the USB one is recommended by the guy who wrote the mach3 vfd plugin
[15:28:35] <Hawku> i have no info about rs232 to rs485 adapter
[15:29:54] <cox> Hawku: ok I just ordered the same ones at least we are in same boat
[15:30:01] <CaptHindsight> Hawku: did your 6040 come with nuts on the ends of the ball screws to set preload?
[15:32:58] <Hawku> i don't know. i have to check
[15:34:39] <CaptHindsight> Hawku: if you look at the opposite end of the ball screw from the motor it should be very clear
[15:40:08] <Hawku> nope
[15:44:25] <CaptHindsight> Hawku: thanks for checking!
[15:44:55] <bnmorgan> anybody good at estimating edm cut time?
[15:45:19] <CaptHindsight> Hawku: so it's just the loose end of the ball screw sitting in the bearing?
[15:49:04] <Hawku> there are lock nuts, but i don't think that those can be used to set the preload?
[15:52:36] <CaptHindsight> Hawku: do the ends opposite the motors look like this?
http://www.automationtechnologiesinc.com/wp-content/uploads/2011/11/DSC_0123.jpg
[15:54:47] <CaptHindsight> http://www.automationtechnologiesinc.com/wp-content/uploads/2011/11/KL-4530-21.jpg on the motor side they will have the end of the ball screw fed through a skate bearing and into the motor coupler
[15:55:58] <CaptHindsight> so there is usually .5-3mm of play in the axial direction of the ball screw
[15:56:49] <CaptHindsight> they don't even bother shimming the ball screws into place with spacers
[15:58:12] <Hawku> CaptHindsight: opposite sides have lock nuts
[15:58:33] <Hawku> the motor side is just flat
[15:58:56] <CaptHindsight> Hawku: great, have a link to the source of those routers? I've been looking for good ones
[15:59:31] <Hawku> http://www.ebay.com/itm/200925159120
[15:59:55] <cpresser> is there a 'default' pinout for sub-d 9pin encoder-connectors?
[16:00:18] <cpresser> i just got a encoder out of an old machine, and i have no documentation or anything.
[16:00:27] <roycroft> thank you for not calling them db-9 :)
[16:00:44] <roycroft> that is one of my pet peeves
[16:01:10] <CaptHindsight> http://i.ebayimg.com/00/s/ODAwWDgwMA==/z/lhUAAOSwDk5T21fF/$_57.JPG yes, you can see the nuts on the ends of the ball screws, many sites use the same pics but they don't arrive with the same setup
[16:02:37] <Hawku> CaptHindsight: yeah
[16:04:06] <_methods> did they put actual stepper dampers on there or are those just handles to manually move the axes
[16:10:34] <ssi> MrSunshine: I've done plasma touch off twice, two different ways
[16:10:37] <ssi> MrSunshine: what do you need to know?
[16:11:52] <MrSunshine> ssi, well its mostly a consirn i have about hf arcing in relays ... for auto matic height touch off of the plasma (not the dynamic height while cutting but before cutting)
[16:12:06] <MrSunshine> trying to help a friend get his cnc plasma set up
[16:12:17] <CaptHindsight> _methods: looks like handles
[16:12:27] <_methods> yeah
[16:12:35] <MrSunshine> and as plates warps it needs to touch off before each pierce of the material =)
[16:12:42] <_methods> too much to ask to get dampers lol
[16:12:59] <MrSunshine> and im afraid he will fry is his bob etc if he just puts a relay on tip contact to the material
[16:13:22] <Hawku> cox: just opened the control box of my cnc. stepper drivers are M542!!!
[16:13:30] <Hawku> cox: the ebay listing says TB6560
[16:13:45] <ssi> MrSunshine: I have a dpdt relay wired up so that it switches the ground and signal to an ohmic cap to the bob, and also switches the dry contact closure signal which is torch fire
[16:13:55] <ssi> so when I command a torch on, it switches off the ohmic cap and switches on the torch fire
[16:14:03] <ssi> that works fine
[16:14:10] <MrSunshine> ssi, "ohmic cap" ? =)
[16:14:29] <ssi> yeah it's just a fancy name for a torch shield with a spade lug on it :P
[16:16:25] <MrSunshine> so 5V to a relay NO contact, software pulls relay ... it moves down .. makes contact to GND (pulling the input on bob high), turns of relay and goes on its mary way? =)
[16:16:45] <MrSunshine> seen that some people use double relays to make more sure for stuff also =)
[16:17:36] <ssi> you could use a double relay I suppose
[16:17:39] <ssi> I just used a DPDT
[16:17:40] <cox> Hawku: ok I just ordered the same ones at least we are in same boat?
[16:17:52] <MrSunshine> DPDT ? =)
[16:18:00] <Hawku> cox: M542 drivers?
[16:18:19] <cox> Hawku: Sorry What is the voltage connected to your drivers
[16:18:21] <MrSunshine> ssi, are your plasma hf ? =)
[16:19:09] <Hawku> cox: 24V
[16:20:46] <cox> Hawku: I guess you could add one more powersuply in series to get 48v and even more power
[16:21:14] <cox> Hawku: looks like the drivers are rated up to 50v
[16:21:19] <Hawku> yeah
[16:21:34] <Hawku> i may try 36V some day
[16:21:54] <Hawku> i think i could try 5000mm/min speed tomorrow
[16:22:17] <ssi> MrSunshine: you know, I'm not sure
[16:22:24] <ssi> MrSunshine: it's a hypertherm powermax45
[16:22:41] <MrSunshine> ahh same machine this guy has
[16:22:42] <_methods> that's HF
[16:22:58] <_methods> not many machines are pilot anymore
[16:22:59] <MrSunshine> ssi, but you are not frying anything then ? =)
[16:23:02] <cox> Hawku: god luck, keep me posted please
[16:23:30] <MrSunshine> ssi, ahhs o you cut both GND and the +5V cable using a double pole relay then ?
[16:23:44] <MrSunshine> to get rid of interferance etc?
[16:24:16] <MrSunshine> (had heaps of problems with itherferance today until we figured out it was a freakin ground loop that did it .. isolated the electronics fromt he plasma table and everything worked fine after that :P )
[16:24:23] <MrSunshine> 4 hours of tinkering ...
[16:24:40] <cox> Hawku: does the hy_vfd come with nice premade display for axis?
[16:25:10] <ssi> MrSunshine: yeah exactly
[16:25:13] <ssi> and it works fine
[16:25:22] <ssi> I'm also using the mesa thcad for torch voltage feedback
[16:25:30] <ssi> and thcad component in linuxcnc for height control
[16:25:31] <ssi> works well
[16:25:33] <MrSunshine> ssi, ok nice =)
[16:26:26] <Hawku> cox: yes. it comes with custompanel.xml, which defines the GUI
[16:31:53] <Deejay> gn8
[16:42:59] <ssi> CaptHindsight: here?
[16:43:42] <CaptHindsight> I'm in the middle of my bassoon lesson, but what is it?
[16:45:28] <ssi> the gemini drives were a bad choice :(
[16:45:43] <CaptHindsight> ah well
[16:45:56] <CaptHindsight> they work great with matching servos
[16:46:30] <ssi> well, no
[16:46:34] <CaptHindsight> Allen Bradley Ultra's are also very nice and then to be all over ebay
[16:46:40] <ssi> what I just learned is that these drives do position mode
[16:46:42] <ssi> and only position mode
[16:46:49] <ssi> there's no option to give it a velocity command
[16:46:53] <CaptHindsight> really
[16:46:54] <ssi> which seems REALLY odd to me
[16:47:06] <CaptHindsight> are they some odd rev?
[16:47:14] <ssi> GV6
[16:47:22] <ssi> GV6 is the controller version
[16:47:27] <ssi> vs GV which is the "dumb" version
[16:47:33] <ssi> I would have thought the GV6 would do everything the GV did
[16:47:41] <ssi> but according to the tech at parker I just talked to, that's not the case
[16:47:57] <CaptHindsight> i usually use the GV
[16:48:36] <ssi> maybe the tech was wrong
[16:48:40] <ssi> it's not impossible
[16:48:51] <ssi> if he was right, though, that's a major setback for me :(
[16:50:03] <ssi> but from what I can gather, these drives aren't actually useful for realtime systems
[16:50:10] <CaptHindsight> http://www.parkermotion.com/literature/pdf/pg055_gemGV6_commands.pdf
[16:50:19] <ssi> you give it a series of commands over serial, and then the "GO" command, and it makes those moves
[16:51:36] <CaptHindsight> can't you set it up in velocity mode and then use the analog in for motion?
[16:51:40] <MrSunshine> http://ibin.co/1dB8ikxnWYa9 <-- this kind of drivers ... wth ... its not defined in microsteps but in pulse/revolution .. how does that work ? :/
[16:51:48] <CaptHindsight> that's how the GV's work
[16:51:53] <ssi> not according to the tech I spoke to
[16:52:27] <MrSunshine> setting it to 6000 ... then i have 68mm/rev on movement ... if i then set 6000/68 0
[16:52:37] <MrSunshine> = 88 steps/mm .. then its faar off...
[16:52:50] <MrSunshine> in a calibration i get like 355steps/mm ... whats up with that? :/
[16:53:07] <MrSunshine> (motor is 300 steps/rev)
[16:53:15] <CaptHindsight> ssi: hmm just looking at the chart the GV6 does not have the +-10V command input
[16:53:35] <CaptHindsight> only GV and GT (for steppers)
[16:53:55] <ssi> yeah
[16:53:56] <ssi> fml
[16:54:24] <CaptHindsight> the GV also cost less
[16:54:36] <ssi> not on ebay they don't :P
[16:58:47] <ssi> well that sucks
[16:59:03] <CaptHindsight> how many amp do you need?
[16:59:05] <ssi> I guess I'm going to have to shelve this whole project until I can sell the old control electronics
[16:59:08] <ssi> um
[16:59:12] <ssi> 7A I think
[16:59:28] <CaptHindsight> http://www.ebay.com/itm/ALLEN-BRADLEY-2098-DSD-010-SE-ULTRA3000-AC-SERVO-DRIVE-120-240-VAC-/291260980823
[17:00:43] <CaptHindsight> http://www.ebay.com/itm/Allen-Bradley-2098-DSD-010-Ultra-3000-Servo-Drive-120-240V-1PH-IN-120-240V-Out-/331229408032
[17:01:26] <CaptHindsight> i think those are the AB drive versions
[17:01:44] <ssi> at this point I'm probably better off just getting 8i20s
[17:01:53] <ssi> at least there I know what I'm going to get
[17:02:11] <ssi> only thing I don't like about that option is it means I have to come up with some massive power supply
[17:02:29] <bnmorgan> anybody good at estimating edm cut time?
[17:02:30] <CaptHindsight> yeah the parkers and AB have their own supplies
[17:02:40] <ssi> yeah that was a big selling point for me
[17:02:50] <ssi> too bad the GV6 are literally useless
[17:02:55] <ssi> what possible application could they have?
[17:03:04] <ssi> non-realtime servo control
[17:03:07] <ssi> makes no sense
[17:03:45] <CaptHindsight> conveyor belts
[17:04:01] <CaptHindsight> gantry
[17:04:39] <CaptHindsight> bbl
[17:04:44] <ssi> I just don't understand why they would make a product that does more, and take away fundamental features
[17:05:11] <CaptHindsight> I always though they did everything and more
[17:05:15] <CaptHindsight> thought
[17:05:18] <ssi> I thought so too
[17:05:24] <ssi> which is why I spent a lot of money buying six of them
[17:05:50] <Connor> ssi You bought some VFD's that are crippled or something ?
[17:06:28] <ssi> servo drives
[17:06:37] <ssi> they're not crippled per se
[17:06:39] <ssi> they're "too smart"
[17:07:41] <Connor> Oh no.. they're not going to work ?
[17:07:46] <ssi> doesn't look like it
[17:07:51] <ssi> which pretty much derails me entirely
[17:08:01] <Connor> What's the issue ?
[17:08:04] <ssi> I can either buy servo drives or I can buy a spindle VFD
[17:08:06] <ssi> but not both
[17:08:20] <ssi> the issue is these drives can't take a command input
[17:08:30] <Connor> WTF?
[17:08:31] <ssi> the only way they operate is to send them commands over serial
[17:08:48] <Connor> That's worthless..
[17:08:50] <ssi> accel 10, velocity 5, move 12000 counts, GO
[17:08:54] <ssi> then it goes
[17:09:03] <ssi> they make two very very similar drives
[17:09:05] <ssi> the GV and the GV6
[17:09:16] <ssi> the GV can do torque, velocity, or step/dir mode
[17:09:24] <ssi> the GV6 has a full controller
[17:09:34] <ssi> it SEEMS like the GV6 is everything the GV is plus the controller
[17:09:36] <ssi> but it's not
[17:09:40] <CaptHindsight> http://www.parkermotion.com/manuals/gemini/Gemini_GV6_Quick_Reference.pdf yeah GV6 are missing the 10V inputs
[17:10:29] <CaptHindsight> http://www.parkermotion.com/manuals/gemini/Gemini_GV_Quick_Reference.pdf GV has them
[17:11:20] <Connor> Wait.. What is pin 23 and 24 ? Analog Input- and Analog Input+
[17:11:25] <CaptHindsight> pions 23 and 24 on the 50 pin drive IO connector
[17:11:32] <CaptHindsight> pins even
[17:11:52] <Connor> Yes. They're labeled differently.. but.. Analog Input would mean 0-10v?
[17:12:47] <ssi> yeah it's just an analog input
[17:13:00] <ssi> it's not a command signal
[17:15:50] <Connor> ssi You sure that's not some sort of command signal? Uses same pins as the other driver.. and in the big manual it does say something about +-10V on those pins
[17:16:36] <ssi> Connor: I talked to a tech at parker on the phone and he said in no uncertain terms that the GV6 doesn't do velocity mode
[17:16:57] <Connor> http://www.parkermotion.com/manuals/gemini/GemGV6ig_entire_guide.pdf Page 63
[17:18:01] <ssi> yes I am aware of it
[17:18:11] <Connor> OKay. Dang.. That sucks.
[17:18:24] <ssi> yes, yes it does
[17:18:28] <ssi> like I said, it shuts me down hard
[17:18:50] <Connor> Ebay'm and see if you can make your money back...
[17:19:13] <Connor> Or see if Parker will take them in on Trade or something..
[17:19:26] <ssi> I'm sure they won't
[17:19:42] <Connor> You never know until you ask. :)
[17:20:04] <ssi> pcw_home_: what sort of power supply can I get to run three 1kw servos with 8i20s?
[17:31:09] <PCW> You can just make a line operated supply
[17:31:43] <ssi> just rectify and filter 220VAC?
[17:32:03] <PCW> you have 120V motors I think
[17:32:07] <ssi> 110V
[17:32:18] <ssi> I'm not clear on what the voltage rating means exactly for bldc servos
[17:32:50] <PCW> (at least their not older Japanese 100V motors)
[17:33:39] <PCW> its confusing some use the DC bus voltage (180 in your case) some use the AC voltage
[17:34:45] <PCW> 220V motors are often rated 360V (that's the DC bus voltage = rectified and cap filtered 220VAC)
[17:35:23] <ssi> so if I rectified and filtered 120V, and fed the ~180VDC to three 8i20s, that'd work for my motors?
[17:35:41] <PCW> Yes
[17:36:03] <ssi> and then they take RS422 for the host comms... can I pull that from the 7i77, or do I need another breakout for that
[17:36:34] <PCW> a 7I85 is more suited
[17:37:16] <ssi> hm ok
[17:37:39] <PCW> 5x RS-422 ports 4X encoder inputs
[17:38:36] <ssi> that then eliminates my need for the 7i77 (which I already have), but I'd need it or something else to run my spindle VFD and all my other IO
[17:39:18] <ssi> crap this is really wrecking my plans
[17:39:24] <PCW> or just add a 7I74 for 8 more RS-422 ports
[17:40:56] <PCW> do you know the peak motor current?
[17:41:17] <ssi> 6.8A
[17:41:22] <ssi> the Z motor might be bigger, I'm not sure
[17:41:40] <PCW> that's probably a continuous stall rating
[17:41:51] <ssi> yeah I think so
[17:41:58] <ssi> says stall 5.9Nm, 6.8A
[17:42:12] <ssi> but it's also the only current rating on the tag
[17:42:23] <ssi> and there's zero documentation on these motors in existence as far as I can tell
[17:42:50] <PCW> so 8I20 all the way up should be enough (30A) ~4.5 X cont
[17:45:29] <PCW> Will your drives do analog torque mode?
[17:45:55] <PCW> that may be a simpler way out
[17:45:58] <ssi> apparently not!
[17:46:13] <ssi> apparently the only thing they'll do is full control moie
[17:46:21] <ssi> where you issue them commands over serial and then tell them "GO"
[17:46:26] <ssi> I frankly don't see the point
[17:46:34] <PCW> argh
[17:46:53] <ssi> I'm unbelievably frustrated right now
[17:47:12] <PetefromTn_> what'd I miss?
[17:47:15] <ssi> I just finished up a design for that hall converter, submitted gerbers to my board house and paid for them, this morning
[17:47:22] <ssi> if I go 8i20 that'll be money wasted
[17:47:27] <Tom_itx> PetefromTn_ the brick ssi threw at his drivers
[17:47:44] <PCW> that seems so unlikely that they only support indexing mode
[17:47:46] <PetefromTn_> I thought you had it all sorted for the drives
[17:47:58] <ssi> PCW: it seems unlikley to me too
[17:48:05] <ssi> the GV does torque mode, velocity mode, step/dir mode
[17:48:14] <ssi> the GV6 is almost identical, has the controller feature as well
[17:48:17] <ssi> except it ONLY does controller mode
[17:48:28] <PCW> ouch
[17:48:32] <Connor> I wonder if you can lobotomize them ?
[17:48:39] <ssi> Connor: I wonder also
[17:48:44] <ssi> I'm sure it won't be trivial
[17:48:50] <PetefromTn_> and you have the GV6 I suppose...
[17:48:56] <ssi> of course I do
[17:48:58] <ssi> I have six of them ffs
[17:49:23] <PCW> great for factory automation...
[17:49:24] <Connor> I still say call parker and see if you can do a trade in or something.. 6 for 3..
[17:49:30] <ssi> Connor: they don't even sell them
[17:49:34] <ssi> they referred me to local distributors
[17:50:23] <PCW> check them out and sell them on Ebay as tested :-)
[17:51:09] <PetefromTn_> damn that sucks..
[17:51:14] <ssi> yeah
[17:51:17] <ssi> it's just a huge setback
[17:51:30] <ssi> cause now I have to spend $800 on drives from mesa
[17:51:38] <ssi> which means I can't buy a VFD
[17:52:12] <ssi> there are some AMC drives on ebay that'd work well, but there's not three of them for a low price
[17:52:57] <ssi> I can get two of them right now for a reasonable price
[17:53:19] <PetefromTn_> you really should put the parts you will not be using on ebay you might be surprised at how quickly they sell...
[17:53:29] <ssi> I put the servo drive up already
[17:53:36] <PetefromTn_> Also post them on the Cincinanatti forum on the zone.
[17:53:47] <PetefromTn_> I got a lot of response for the parts I sold there.
[17:53:57] <ssi> yeah that's a good ideoa
[17:54:03] <PetefromTn_> It did take a little while to sell them but not too long really..
[17:54:38] <cox> ssi: What wold happen if you gave commands timed one after another. Just like a stepper it is also commands stringed together.
[17:55:20] <ssi> cox: it wouldn't be a realtime servo system
[17:55:43] <cox> true
[17:55:43] <ssi> linuxcnc isn't going to be able to coordinate three axes if it has to drip feed them over serial like that
[17:56:40] <Jymmm> 232 or 485 ?
[17:56:48] <ssi> 232
[17:56:52] <ssi> actually I think it'll do either
[17:57:05] <Jymmm> 485 I think has the speed
[17:57:32] <ssi> the whole concept of closing the loop in linuxcnc goes out the window though
[17:57:35] <ssi> I might as well be running mach3
[17:57:49] <PetefromTn_> NOOOOO!!!!!
[17:57:52] <Tom_itx> oh god!
[17:57:54] <PetefromTn_> Don't even say that....
[17:57:58] <Jymmm> wait, closed loop stepper?
[17:58:02] <cox> Myoh
[17:59:03] <ssi> nobody said anything about steppers
[17:59:44] <_methods> is that 2 people sayin mach3 in the same day
[17:59:53] <Jymmm> cox did, but it scrolled off
[17:59:59] <_methods> heheh
[18:00:22] <PetefromTn_> we should tar and feather the scalawags...LOL
[18:00:23] <cox> never uttered the word in my life
[18:00:40] <Jymmm> MS-DOS + TurboCNC!!!
[18:00:59] <PetefromTn_> LOL my pal art LOVES TurboCNC
[18:01:14] <Tom_itx> hey, DOS runs faster than windows!
[18:01:25] <PetefromTn_> I'm trying to pry him away from it for his Lathe build..
[18:01:26] <Jymmm> TurboCNC is faster than linuxcnc
[18:01:48] <Jymmm> Sad, but true.
[18:04:54] <zeeshan> http://i.imgur.com/8Zfctcf.jpg
[18:04:56] <zeeshan> got the truck!
[18:05:05] <cox> ssi: If you continualy send the differense between sv and pv to your drive wold that not be closed loop. I mean could not hurt to try
[18:05:30] <ssi> it's not worth that much hackery
[18:05:43] <zeeshan> http://i.imgur.com/8Zfctcf.jpg
[18:05:44] <zeeshan> er
[18:05:45] <ssi> I'm debating whether I should try to have the boardhouse cancel my order and refund my money
[18:05:47] <zeeshan> whats that stick for in the back
[18:05:49] <zeeshan> 9'?
[18:06:16] <Tom_itx> ssi how many did you order?
[18:06:21] <ssi> 30
[18:06:29] <Tom_itx> holy crap you're confident
[18:06:43] <ssi> well the price difference between 3 and 30 is like $8
[18:06:49] <ssi> most of the cost is setup and shipping
[18:06:52] <ssi> they're like 40c apiece
[18:06:58] <Jymmm> zeeshan: the height before you smack something
[18:06:58] <Tom_itx> you should have talked to hackvanna
[18:07:04] <ssi> above 30 is where the shipping rate starts to go up
[18:07:10] <zeeshan> Jymmm: relative to what?
[18:07:18] <ssi> it was only $170
[18:07:19] <Jymmm> zeeshan: bed raised
[18:07:26] <ssi> and I guess having a cpld board could be handy for other things as well
[18:07:34] <zeeshan> Jymmm: im trying to figure out
[18:07:42] <zeeshan> if im okay to load a 6.5 tall machine
[18:07:44] <zeeshan> '
[18:07:44] <Jymmm> zeeshan: figure what out?
[18:07:46] <zeeshan> on that flatbed
[18:07:50] <Jymmm> oh
[18:07:58] <Jymmm> what the height of the bed?
[18:08:15] <zeeshan> i dont know
[18:08:32] <Jymmm> zeeshan: then get your ass off the computer and go find out =)
[18:09:16] <Tom_itx> or be all 22nd century and take it with ya
[18:09:17] <Jymmm> zeeshan: The 9ft is just clearnace of the truck + whatever you load on it =)
[18:09:42] <Jymmm> bridges, drive-thrus, overhangs, awnings, etc
[18:09:57] <Tom_itx> Jymmm, bridges don't stop the locals here
[18:10:09] <Jymmm> Tom_itx: heh
[18:10:13] <Tom_itx> a dumpster truck took one out last year because he had his forks up
[18:10:26] <Jymmm> Tom_itx: Nice.... NOT!
[18:10:36] <Tom_itx> took out 2 sections of bridge
[18:10:54] <Jymmm> Tom_itx: I like it when the bridges take out the trucks, it's funnier than hell
[18:10:56] <Tom_itx> oh and all the powerlines and stop lights between the shop and the bridge
[18:11:23] <Jymmm> oh geeze, did he not notices the sparks ???
[18:11:31] <Tom_itx> apparently not
[18:11:38] <Jymmm> *sigh*
[18:20:22] <Jymmm> zeeshan: Just look out for low height restrictions, and ways to turn around if you can/need to.
[18:25:07] <zeeshan> Jymmm:
[18:25:11] <zeeshan> just measured it.
[18:25:18] <zeeshan> from bed to tallest point is 5 feet
[18:25:33] <zeeshan> machine is on skid so it'll probably sit at 7 feet MAXIMUM
[18:25:47] <zeeshan> 7+4 = 11 feet
[18:25:54] <zeeshan> low restrictions on the highway that i saw was 4.4 m
[18:26:01] <zeeshan> which is 14.5 feet
[18:26:05] <zeeshan> i think ill be okay!~
[18:28:20] <zeeshan> do i have to stop at weigh stations?
[18:28:36] <Connor> I woudn't think so.
[18:28:46] <Connor> That's typically for 18-Wheelers
[18:29:05] <zeeshan> sweet
[18:29:12] <zeeshan> i coudnt get the cruise control to work for this truck
[18:29:17] <zeeshan> i really need to figure out how to make it work
[18:29:18] <Connor> Plus, you would have to have a commercial drivers license..
[18:29:27] <zeeshan> http://i.imgur.com/KKQctAq.jpg
[18:29:31] <zeeshan> Connor: true
[18:29:37] <zeeshan> so the left 2 buttons
[18:29:43] <zeeshan> when i press the right one to ON
[18:29:47] <zeeshan> ot shows cruise on the display
[18:29:51] <zeeshan> but when i press the SET button
[18:29:57] <zeeshan> it doesnt go into cruise control mode :(
[18:30:08] <zeeshan> and for some reason i cant drive faster than 55mph
[18:30:20] <zeeshan> er
[18:30:26] <zeeshan> 60mph
[18:31:19] <Connor> It's probably got a governor on it.
[18:31:27] <Connor> Typical in those rent type trucks
[18:32:03] <zeeshan> bah
[18:32:16] <zeeshan> i wanted to do 110 km/h
[18:32:35] <Connor> And THAT's the reason they're installed.
[18:32:48] <zeeshan> haha
[18:32:52] <zeeshan> thats only 10 over here
[18:33:01] <zeeshan> hwy limt is 100
[18:33:38] <Connor> That's around 68pmh..
[18:39:22] <zeeshan> so guys
[18:39:25] <zeeshan> i need your opinion
[18:39:31] <zeeshan> http://wild-maschinen.de/hardware/15
[18:39:33] <zeeshan> thats the machine
[18:39:45] <zeeshan> the cabinet im going to tie down to the front of the bed
[18:39:54] <zeeshan> where the bed goes like |____
[18:40:01] <zeeshan> the machine will be right on the axle
[18:40:07] <zeeshan> strapped down with 5 straps
[18:40:09] <zeeshan> bed straps.
[18:41:39] <Tom_itx> chains
[18:41:44] <zeeshan> chains?!
[18:42:29] <zeeshan> jthornton: pics of transporting cnc
[18:42:30] <zeeshan> ?!
[18:45:14] <Tom_itx> http://gnipsel.com/shop/unload-308/unload-308.xhtml
[18:45:16] <Tom_itx> zeeshan
[18:45:18] <Tom_itx> chains!
[18:45:49] <zeeshan> i cant see how he's trapped it down
[18:45:55] <zeeshan> i only see the green strap in the back
[18:47:05] <Tom_itx> imagine chains there
[18:48:24] <zeeshan> i only have 10,000lb straps
[18:48:52] <Tom_itx> they can get cut
[18:49:23] <zeeshan> how do you tension the chains?
[18:49:33] <Tom_itx> with a chain tensioner silly
[18:50:08] <zeeshan> ill have carboard
[18:50:11] <zeeshan> on alll edges
[18:50:18] <Tom_itx> just saying...
[18:50:32] <zeeshan> http://i.imgur.com/8Zfctcf.jpg
[18:50:34] <zeeshan> the straps are huge!
[18:50:44] <Tom_itx> i know what big straps look like
[18:51:01] <Tom_itx> not saying they won't work but think chains are safer
[18:51:01] <zeeshan> http://i.imgur.com/8Zfctcf.jpg
[18:51:04] <zeeshan> is that a handle
[18:51:09] <zeeshan> to get up the flatbed
[18:51:17] <zeeshan> or a place you can tie crap to? :D
[18:51:26] <zeeshan> Tom_itx: i have like 1 long chain
[18:51:31] <zeeshan> i can use for a safety addition
[18:51:54] <zeeshan> what does a chain tensioner look like
[18:52:42] <jdh> turnbuckle
[18:52:49] <jdh> or a cam clamp
[18:53:10] <CaptHindsight> http://imagebin.ca/v/1dBjQpH8rRLJ I just used 2 skates
[18:53:37] <jdh> that's a big chunk of metal
[18:53:41] <zeeshan> :D
[18:54:24] <CaptHindsight> http://imagebin.ca/v/1dBjv6xGBKYv
[18:54:41] <zeeshan> nice capricorn_1
[18:54:44] <zeeshan> CaptHindsight:
[18:54:48] <jdh> I don't buy it.... way too neat in there.
[18:55:10] <zeeshan> that bridgeport looks like a baby
[18:55:15] <zeeshan> next to the matsurra
[18:57:43] <CaptHindsight> jdh: that was just during the move, you can hardly walk through the area now :)
[19:02:37] <CaptHindsight> http://imagebin.ca/v/1dBmE6hMbnSg more like this
[19:03:01] <Connor> CaptHindsight: What is that on the bench ?
[19:03:41] <CaptHindsight> a few belt drive positioners in front
[21:07:25] <ssi> :(
[21:11:55] <ssi> see, this pisses me off
[21:11:56] <ssi> "Compumotor's Gemini GV6 is a compact, low-cost, digital servo drive/controller. In addition to all of the drive features of the Gemini GV, the GV6 incorporates basic motion control and programming capabilities, allowing solutions for many distributed control applications."
[21:12:08] <ssi> that's a blatant lie
[21:12:17] <jdh> how so
[21:12:26] <jdh> the 'low-cost' part?
[21:13:25] <ssi> "In addition to all of the drive features of the Gemini GV"
[21:13:35] <ssi> except for the parts that they left out
[21:13:40] <jdh> what's missing?
[21:13:47] <ssi> the ability to use it as a servo drive
[21:13:47] <jdh> (I've only used GV6)
[21:13:55] <ssi> how are you using GV6?
[21:14:15] <ssi> they don't have an analog command input
[21:14:17] <jdh> heh
[21:14:24] <ssi> the only way to run them is in position mode, and command them via serial commands
[21:14:38] <jdh> I run them in position mode, via digital IO
[21:15:07] <ssi> the GV has +/-10V analog command input, and you can run them as torque or velocity mode drives
[21:15:13] <ssi> the GV6 DOES NOT have that capability
[21:15:21] <ssi> that's the blatant lie
[21:15:47] <jdh> never occured to me. but, I use them for positioning
[21:16:00] <jdh> aries and compax for outside control
[21:16:11] <ssi> they're useless for coordinated motion with linuxcnc
[21:16:59] <jdh> how much were they?
[21:17:12] <ssi> well I've got six that I spent about $600 on total
[21:17:23] <ssi> but three of them were $130 shipped and I think they're all dead
[21:17:26] <ssi> so that was a great value
[21:19:34] <ssi> have any GV drives on hand and want to trade? :)
[21:20:16] <jdh> nope.
[21:20:24] <jdh> you could make it a step/dir drive
[21:20:54] <ssi> sounds terribl
[21:21:12] <jdh> yeah, would probably be ungodly slow too
[21:22:02] <jdh> wonder if analog is an option via those simm daughterboard things
[21:22:32] <jdh> aren't there DRIVE modes for torque and velocity mode?
[21:22:44] <jdh> DMODE maybe
[21:23:02] <ssi> I thought so
[21:23:13] <ssi> but I called parker today to ask them about helping me get parameters for my motors
[21:23:27] <ssi> and i told the tech that I might not need a full set of parameters if I only wanted to run in velocity mode
[21:23:36] <ssi> and he says "...the GV6 doesn't have velocity mode"
[21:23:45] <ssi> and when I started looking into it
[21:23:48] <ssi> sure as shit, it doesn't
[21:23:55] <ssi> it doesn't even have a +/-10V analog command input
[21:24:17] <ssi> and if yo ulook here
[21:24:18] <ssi> http://www.faberinc.com/parker/gem_servo.pdf
[21:24:26] <ssi> scroll down to the table of features
[21:24:38] <ssi> it clearly shows that the GV and GT are the only ones with +/-10V command input
[21:24:54] <ssi> despite the fact that it also very clearly says:
[21:24:55] <ssi> In addition to all of the drive features of the Gemini GV, the GV6 incorporates basic motion control and programming capabilities, allowing solutions for many distrib- uted control applications.
[21:24:59] <ssi> which is a lie! D:
[21:27:40] <MacGalempsy> hello
[21:31:04] <PetefromTn_> Damn that is a pisser...
[21:31:28] <Connor> ssi Call them out on that statement.. That's false advertising. :)
[21:31:57] <PetefromTn_> yeah maybe you can get them to trade them out for the ones that do...
[21:33:59] <MacGalempsy> ssi: did you look for tech sheets on the archived internet? I had some success on some older drives
[21:34:34] <MacGalempsy> http://archive.org/web/
[21:34:49] <jdh> the 50pin pinout shows analog input
[21:36:50] <jdh> doesn't look like control though, just something to used via a program
[21:37:46] <ssi> jdh: yeah it's not control
[21:40:19] <ssi> http://www.parkermotion.com/manuals/gemini/gemini_programmers_reference.pdf
[21:40:21] <ssi> look at page 75
[21:40:24] <ssi> DMODE documentation
[21:42:20] <jdh> sucks for your app.
[21:42:26] <jdh> nice for mine...
[21:43:05] <jdh> gemini is legacy now, along with zetas, 6Kx, etc.
[21:43:06] <Connor_iPad> Jdh: what's your app.
[21:43:28] <jdh> they bought out a german company a couple of years ago and are switching to their stuff..
[21:43:50] <ssi> I just can't fathom why they'd intentionally remove the analog control features
[21:43:53] <jdh> Connor: single axis cutter. Removes flash from welded tube
[21:44:40] <jdh> goes to start position, makes a bunch of go/stop moves to break up chips, slow pass back that cleans up, then back to home.
[21:46:12] <ssi> this sucks so much
[21:46:20] <ssi> I was hoping to have motion in at least one axis tonight
[21:46:32] <ssi> now it'll be a week before I can do anything
[21:46:36] <ssi> losing momentum
[21:46:44] <jdh> step/dir mode
[21:46:54] <Tom_L> ssi, go work on the laser a bit
[21:47:03] <Tom_L> carve a pumkin
[21:47:03] <ssi> the laser is 65 miles away
[21:50:04] <PetefromTn_> what are you gonna do now?
[21:50:20] <jdh> buy new drives
[21:50:35] <XXCoder> make your laser powerful enough and carve a pumpin from 65 miles away heh
[21:50:42] <jdh> resell these as tested & working
[21:51:20] <ssi> PetefromTn_: thinking about trying to take the spindle apart to do the bearings
[21:51:27] <ssi> but in order to do that I have to get the head much higher than it is
[21:51:31] <ssi> which'll suck without drives
[21:51:56] <jdh> you have position mode
[21:51:56] <PetefromTn_> LOL I think I mentioned about a dozen times now how I did it on my machine...
[21:51:59] <Tom_itx> oh stop whinin and get on with it!
[21:52:07] <ssi> yeah I already raised the head a bit to get it off the table
[21:52:11] <ssi> but it needs to come up about 8"
[21:52:26] <PetefromTn_> that is just a couple turns really no big deal..
[21:52:27] <Tom_itx> you'll appreciate the servos more once they're raising it
[21:53:03] <ssi> on my machine there's a bit of sheet metal that actually keeps the servo from rotating
[21:53:07] <ssi> the brake connector hits it
[21:53:11] <ssi> and it was already bent a bit
[21:53:19] <PetefromTn_> yeah I removed that on my machine..
[21:53:19] <ssi> but I had to bend it even more with channel locks to get the servo to turn 1 full turn
[21:53:38] <PetefromTn_> it also had a big fan motor up there that blew on the servo.
[21:53:42] <ssi> yeah same
[21:53:50] <PetefromTn_> I just unbolted it temporarily and moved it aside.
[21:53:53] <ssi> yeah me too
[21:54:01] <ssi> it's also filthy up there too
[21:54:06] <ssi> I dunno how this machine got that damn filthy
[21:54:07] <PetefromTn_> yup
[21:54:27] <PetefromTn_> mine is still kinda filthy up top there..especially around the toolchanger..
[21:55:03] <tjtr33> clever lathe crossslide uses flexure
http://web.mit.edu/mact/www/Projects/Classes/272/2723Dpdfs/2723DpdfsIndex.html
[21:55:20] <ssi> honestly I'm not sure I want to take the spindle apart just yet
[21:56:09] <PetefromTn_> From what I understand if it is similar to my machine you need a special spanner of some sort to take it apart or reassemble it..
[21:56:34] <ssi> possibly
[21:56:38] <ssi> also I need to get a press in here
[21:57:32] <ssi> heh two days ago I gutted the electronics cabinet
[21:57:44] <ssi> and tonight I find out that a guy has a 5hp rotary converter out here
[21:57:50] <ssi> that I could have used to move the axes around with the old control
[21:58:27] <PetefromTn_> yeah well that is neither here nor there for where you are going....
[21:59:02] <ssi> I'm not going anywhere anymore
[21:59:11] <ssi> this drive thing really fucked up my momentum
[21:59:45] <PetefromTn_> yeah I know how that can stall your steam...
[22:00:00] <Connor_iPad> ssi. Switch projects. Work on the G0704
[22:00:17] <ssi> I'm at the airport
[22:00:22] <Connor_iPad> That's what I do.
[22:00:48] <PetefromTn_> like I had it in my mind the spindle encoder was going to be a real pain in the ass so I kinda put it off for quite awhile..
[22:00:56] <ssi> I'm glad I didn't redo the 704 mounts for the parker servos
[22:01:01] <ssi> cause I'd have the same problem on that machine
[22:01:07] <ssi> these drives are paperweights
[22:01:43] <PetefromTn_> any ideas what drives you are going to use now? or are you going in an entirely different direction..
[22:02:28] <ssi> I bought two AMC drives on ebay
[22:02:30] <ssi> trying to get a third
[22:02:43] <ssi> the third is actually in Cumming, I put in a make offer on it and told the guy I'd come pick it up
[22:02:48] <ssi> I was hoping he'd get back on it tonight
[22:02:54] <ssi> if I could have driven up there to get it tonight, I would have
[22:02:59] <ssi> then I could be getting motion going tonight
[22:03:04] <PetefromTn_> are they new drives?
[22:03:08] <ssi> no, used
[22:03:14] <ssi> I've had good luck with amc stuff in the past tho
[22:03:30] <ssi> I was planning on getting amc drives for those parker servos, and CaptHindsight talked me into the geminis
[22:03:44] <PetefromTn_> how dare he... LOL
[22:03:55] <ssi> heh
[22:04:10] <ssi> well they looked really nice!
[22:04:14] <ssi> and the GV drives probably are
[22:04:24] <ssi> I just can't fathom why they'd make these so marginally useful
[22:04:37] <PetefromTn_> special purpose drives I guess..
[22:05:12] <ssi> thing is, internally it does everything the GV does plus more
[22:05:17] <ssi> they just chose to intentionally cripple it
[22:05:34] <Tom_itx> no 'how to' to re'enable it?
[22:06:01] <PetefromTn_> apparently there is nothing to enable in it...
[22:07:24] <ssi> Tom_itx: there's next to no user hackery on the internet for this stuff
[22:09:09] <Tom_itx> most owners wouldn't want to
[22:09:39] <Connor_iPad> Probably just firmware.
[22:10:40] <ssi> yeah it probably is just firmware
[22:11:06] <Tom_itx> there's gotta be a way to upload new firmware
[22:12:38] <ssi> there is
[22:14:41] <ssi> on their site you can download firmware updates
[22:15:06] <Tom_itx> have you asked them if something like that would work?
[22:15:11] <ssi> no
[22:15:20] <ssi> the firmware updates are just "gemini firmware"
[22:15:25] <ssi> no distinction between GV and GV6
[22:15:32] <Tom_itx> ask them
[22:15:35] <ssi> I'm about to open one up and see if there's a switch or something
[22:15:37] <ssi> can't right now :P
[22:15:50] <Tom_itx> no but it's an option
[22:23:36] <ssi> first things first, I'm gonna find out if I got scammed on these U6's
[22:23:48] <ssi> sell me three "as is untested" and one's dead, i guess that's bad luck
[22:23:56] <ssi> if three are dead, I got scammed
[22:24:09] <PetefromTn_> GET PISSED!!
[22:24:23] <PetefromTn_> and I don't mean drunk :D
[22:24:33] <ssi> trust me I'm beyond pissed
[22:28:19] <ssi> heh one out of three powers up
[22:28:42] <ssi> one does nothing, one just clicks and flashes
[22:29:02] <PetefromTn_> at least it does not release the magic smoke huh?
[22:29:21] <ssi> I imagine someone already did that
[22:29:36] <PetefromTn_> well there's your problem..
[22:29:44] <ssi> different problem
[22:33:10] <ssi> I wish I had a GV drive on hand to see how they're different inside
[22:33:17] <ssi> cause the amplifier board is actually labeled GV
[22:33:22] <PetefromTn_> one is missing smoke..
[22:39:12] <ssi> i guess I should jsut close up shop and go home and lay on my ass for the weekend
[22:39:29] <PetefromTn_> that sounds like a great idea..
[22:39:40] <PetefromTn_> listen to your homebuilt stereo
[22:39:49] <PetefromTn_> relax
[22:40:00] <XXCoder> it nicely solves "too close to problem" probloem
[22:40:01] <ssi> the way things are going today, it'll probably be broken
[22:40:21] <PetefromTn_> LOL ya just never know
[22:42:23] <XXCoder> interesting video
http://sploid.gizmodo.com/seeing-an-old-anvil-get-restored-is-surprisingly-enjoya-1644177639
[22:42:28] <XXCoder> ignore the animated gif on top
[22:45:47] <CaptHindsight> heh I said GV not GV6 :p
[22:46:14] <ssi> CaptHindsight: yeah I know... without digging very deep into their literature you'd think that the GV6 would be at least as useful
[22:46:22] <ssi> and they flat lie in their sales brochure
[22:46:23] <ssi> Compumotor's Gemini GV6 is a compact, low-cost, digital servo drive/controller. In addition to all of the drive features of the Gemini GV, the GV6 incorporates basic motion control and programming capabilities, allowing solutions for many distrib- uted control applications.
[22:46:52] <CaptHindsight> I never used the GV6's that it a surprise to me as well. They should advertise them that way
[22:47:02] <CaptHindsight> should not
[22:47:58] <ssi> agreed
[22:48:01] <ssi> it's horribly misleading
[22:48:04] <ssi> do you have GVs on hand?
[22:48:24] <CaptHindsight> I'm using all that I have
[22:48:38] <ssi> I'm mostly just curious to get a photograph of the top board in one
[22:48:48] <ssi> I suspect the hardware is identical
[22:49:10] <CaptHindsight> if i could take one aprt I would
[22:49:17] <CaptHindsight> apart even
[23:20:55] <zeeshan> yawn
[23:20:55] <the_wench> wake up zeeshan
[23:21:00] <zeeshan> time to go soon
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
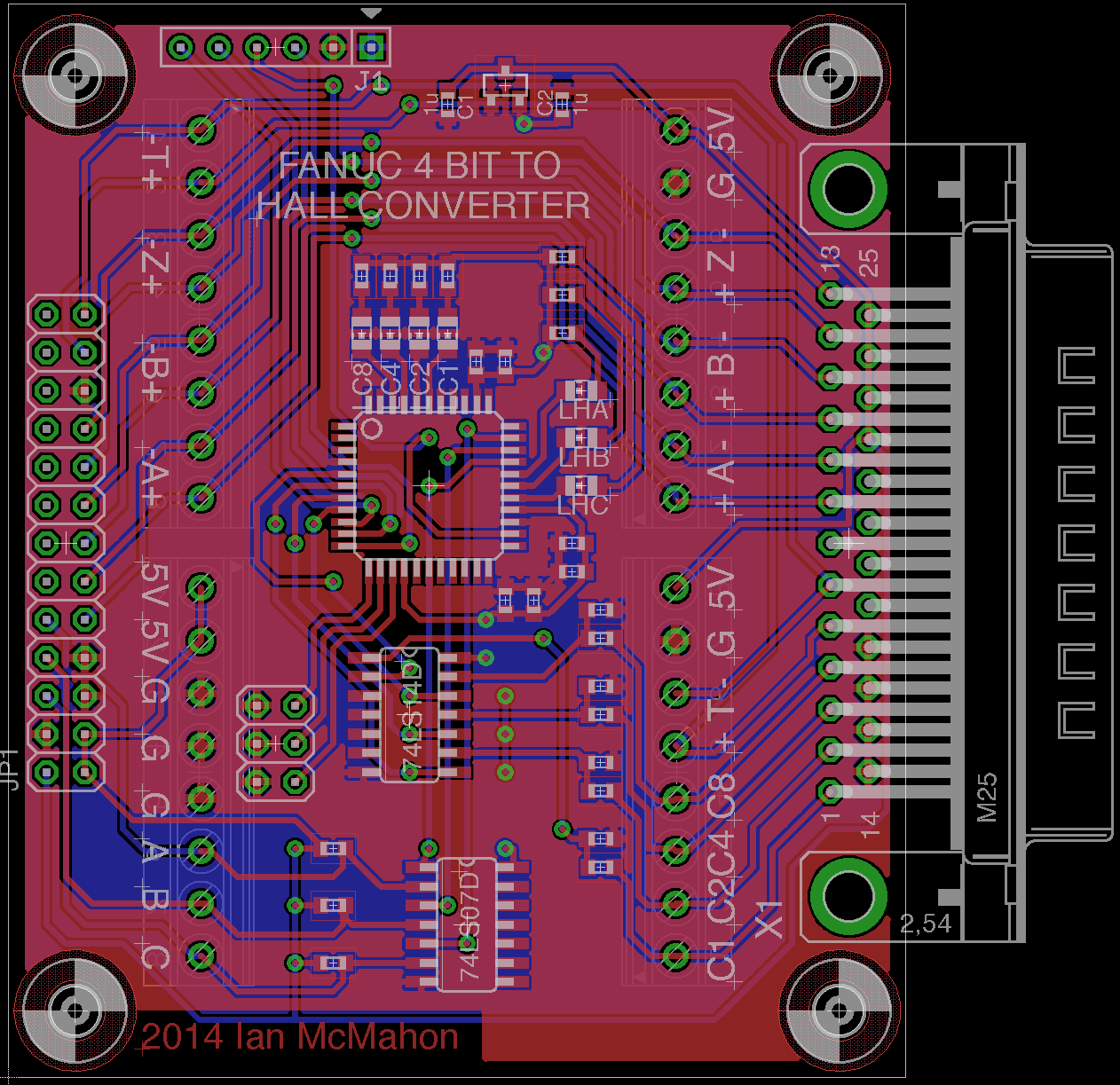{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}