Back
[00:03:39] <XXCoder1> interesting
[00:03:47] <XXCoder1> wonder what its use for
[00:04:08] <XXCoder1> I recall bearings tend to be drop cool (long distance down fall while it cools and solidfy
[00:04:20] <XXCoder1> maybe its for even more perfect sphere bearing
[00:07:41] <zeeshan> hows your cnc project coming along
[00:07:54] <XXCoder1> stalled a bit
[00:07:59] <XXCoder1> too busy working lol
[00:08:06] <zeeshan> haha
[00:08:08] <zeeshan> i know how it feels!
[00:08:28] <zeeshan> i still need to hook up the ground wires on my cnc
[00:11:19] <XXCoder1> lol oh well eh
[00:31:05] <XXCoder1> LOL
[00:31:06] <XXCoder1> http://bjblaster.homedns.org/blog/?x=entry:entry140716-075241
[00:31:12] <XXCoder1> one of my silly ideas exist
[00:31:26] <XXCoder1> and finally a use for all those millions AOL cds still around? ;)
[00:37:02] <Jymmm> XXCoder1: Dude, get some bandwidth!
[00:37:13] <XXCoder1> huh
[00:37:56] <Jymmm> the link you gave
[00:38:05] <XXCoder1> its not my site
[00:38:31] <Jymmm> then dont post crap urls!
[00:38:54] <XXCoder1> whatfuckingever
[00:39:07] <zeeshan> guys
[00:39:09] <zeeshan> relax
[00:39:13] <zeeshan> 120am
[00:39:30] <Jymmm> it's dwg slow, then trying to watch the video its ...[PAUSE],,,[AUSE...PAUSE...PAUSE
[00:39:43] <zeeshan> =]
[00:40:10] <XXCoder1> it worked fine for me
[00:40:38] <XXCoder1> I probably used guys month bandwidth lol
[01:32:46] <Loetmichel> mornin'
[01:55:08] <automata> hi PCW_home
[01:55:42] <automata> I have a 5i24 card and I tried to roll out my own bitfile for it.
[01:56:26] <automata> on programming the eeprom and rebooting the computer, the card is not recognized on the PCI bus with an lspci
[01:57:17] <automata> I switched the W7 jumper to Down position to activate the alternate eeprom and the card is now recognised by lspci as well as mesaflash
[01:57:58] <automata> now question is how do I write a known good configuration to the hosed eeprom
[02:02:28] <automata> hi mhaberler
[02:08:05] <Deejay> moin
[03:38:24] <automata> hi anyone know how to recover a 5i24 after the eprom has been hosed
[03:39:13] <automata> I have the card booted up using the backup eprom and I can identify the card using an eprom
[03:39:25] <automata> sorry identify the card using lspci
[03:39:47] <automata> now I want to write the configuration to the first eeprom
[03:53:33] <Tom_itx> PCW would but he doesn't wake up for a few hrs
[04:43:19] <automata> saw pcw_home logged on... so I thought he might be burning the late night oil!!
[04:44:07] <Jymmm> Many never log out
[04:44:54] <Jymmm> He should be around in 6 hours.
[04:55:17] <automata> i think I loaded a x25 bitfile in an x16 card
[04:55:27] <automata> and now the fpga goes to fallback
[05:16:48] <Guest94282> Hallo zusammen
[05:18:13] <Spida> jogging out? how is that supposed to work?
[05:18:19] <Spida> s/j/l/
[05:18:32] <Klaus-Krefeld> ist jemand aus der Nähe von Krefeld hier ?
[05:19:26] <Klaus-Krefeld> bin absolut neu hier und habe leider keine Ahnung von Linux
[05:39:18] <Deejay> tach krefeld-klaus
[05:40:08] <Deejay> wo liegt das problem genau?
[05:46:38] <Klaus-Krefeld> das problem liegt da , "es kunktioniert nichts wenn ich die Software updaten will bekomme ich Fehlermeldungen
[05:46:55] <Klaus-Krefeld> wie gesagt bin absoluter Neuling
[05:49:08] <Deejay> hmm
[05:49:21] <Deejay> aber vorher lief es schon einmal, ja?
[05:49:40] <Klaus-Krefeld> nein es lief noch nicht
[05:49:45] <Deejay> manche sachen sollte man nicht updaten, weil es sonst probleme mit dem real-time-teil geben kann
[05:50:17] <Deejay> achso
[05:50:17] <Deejay> hm
[05:50:23] <Klaus-Krefeld> habe es so gemacht wie es in dem YouTube Video gezeigt wurde, mit Live-CD installiert
[05:50:40] <Deejay> ja, und wie weit bist du gekommen bzw. wo genau hakt es dann?
[05:51:15] <Klaus-Krefeld> es hakt schon da wenn ich meine Maschine einrichten will
[05:51:47] <Klaus-Krefeld> kann die Treiber für das Chinaboard TBA nicht finden
[05:52:20] <Deejay> aha. okay, das ist schon etwas spezieller dann
[05:52:29] <Klaus-Krefeld> in der Videoanleitung war es zumindest in deutsch :-(
[05:52:40] <Deejay> da kann ich dir leider auch nicht helfen. ich brauchte bei mir keine treiber, ist einfach am LPT dran ;)
[05:53:09] <Klaus-Krefeld> habe vorher mit Windows XP gearbeitet und mit der Mach3 Software
[05:53:37] <Klaus-Krefeld> die Karte ist auch bei mir am LPT angeschlossen
[05:53:46] <Deejay> ja, das meiste ist wohl englisch-sprachig, ebenso wie die meisten leute hier auch
[05:54:21] <Klaus-Krefeld> ich merke es :-) hätte besser in der Schule aufpassen sollen ;-)
[05:54:35] <Deejay> hihi
[05:55:07] <Deejay> hin und wieder sind paar deutsch-sprachler hier, ggf. einfach weiter versuchen und nochmal fragen
[05:55:40] <Deejay> wie wird denn dein Chinaboard angeschlossen?
[05:55:54] <Deejay> ist das usb, ne karte im rechner oder wie funktioniert das?
[05:56:12] <Klaus-Krefeld> ich war auf YouTube und da waren einige Videos von Magic33de der ist wohl aus Berlin und meistens ab 19.00 Uhr hier im Kanal
[05:57:05] <Klaus-Krefeld> die Karte wird ganz normal an den LPT angeschlossen und von da aus gehen Motor-Kabel und Sensoren von der Karte an die CNC
[05:57:28] <Deejay> hmm, und da braucht man treiber für?
[05:58:11] <Klaus-Krefeld> das weiss ich eben nicht :-(
[05:58:22] <Deejay> ich musste bei mir halt nur einstellen, welcher pin am LPT wofür ist
[05:58:28] <Deejay> step, richtung und sowas
[05:58:53] <Klaus-Krefeld> in der Video-Anleitung war jedenfalls das TBA6560 in der Configuration aufgelistet
[05:59:28] <Deejay> hmm okay
[05:59:30] <Klaus-Krefeld> ja so habe ich das auch gehabt
[06:02:02] <Deejay> hmm, tjo, sorry, kein plan. ich hab das damals im stepconf-wizard zusammengeklickt und gut wars ;)
[06:02:15] <Deejay> ist aber auch schon ne weile her
[06:03:16] <Klaus-Krefeld> ich werde es nochmal versuchen , ansonsten versuche ich heute Abend gegen 19.00 Uhr den Kollegen aus Berlin zufinden ;-)
[06:03:24] <Klaus-Krefeld> erstmal DANKE
[06:03:37] <Deejay> da nicht für, konnte ja eh nix helfen
[06:03:44] <Deejay> ist das der IchGuckLive?
[06:03:59] <Deejay> oder heißt der hier auch magic33...?
[06:04:03] * SpeedEvil turns on rot-13, and finds it doesn't help.
[06:04:05] <Klaus-Krefeld> ;-)
[06:04:10] <Deejay> hrhr SpeedEvil ;)
[06:04:32] <Klaus-Krefeld> nee auf YouTube heisst er magic33de
[06:05:05] <Klaus-Krefeld> weiss nicht wie er hier im Chat heisst
[06:05:17] <Deejay> hm okay
[06:10:46] <Klaus-Krefeld> habe gerade nochmal das Video angesehen , ja es ist "IchGuckLive"
[06:10:55] <Deejay> jo, der ist meist gegen abend da
[06:11:01] <Deejay> so ziemlich regelmäßig
[06:11:33] <Klaus-Krefeld> dann habe ich ja noch Hoffnung ;-)
[06:11:40] <Deejay> :)
[06:14:23] <Loetmichel> klas: die chips heissen TB6560
[06:14:32] <Loetmichel> und treiber brauchts da keine, die hängen am parallelport
[06:14:41] <Loetmichel> dein PC hat doch hoffentlich noch einen?
[06:14:43] <Loetmichel> echten?
[06:14:48] <Loetmichel> Klaus-Krefeld
[06:14:52] <Klaus-Krefeld> ja den hat er :-)
[06:14:58] <Loetmichel> btw: hier is englisch
[06:16:17] <Loetmichel> mal google befragen
[06:17:29] <Loetmichel> hmm, OF->kr = 265 km... das is ein bisschen viel, aber wenn sich kein anderer findet fahr ich zu dir...
[06:17:39] <Loetmichel> @ Klaus-Krefeld
[06:17:50] <Klaus-Krefeld> habe ich schon gemacht . daher bin ich ja hier auf den Chat gekommen
[06:18:03] <Loetmichel> kannst du englisch?
[06:18:09] <Klaus-Krefeld> ne soviel Umstände möchte ich nicht machen
[06:18:17] <Klaus-Krefeld> leider nicht so gut
[06:18:43] <Loetmichel> macht nix, ich auch nicht ;-)
[06:18:47] <Loetmichel> machen wir mal auf englsich weiter
[06:19:33] <Deejay> hihi
[06:19:36] <Loetmichel> i would drive to you if noone else is nearer than me. but i would do that on saturday as the earliest time i amm free
[06:19:46] <IchGuckLive> hi all ;-)
[06:19:52] <Deejay> there he is!
[06:19:57] <Deejay> IchGuckLive, dein typ wird verlangt ;)
[06:19:57] <Loetmichel> mornin' IchGuckLive
[06:20:15] <IchGuckLive> Ich heute wollen alle was von mir
[06:20:39] <IchGuckLive> ich war auf YouTube und da waren einige Videos von Magic33de
[06:20:42] <IchGuckLive> B)
[06:20:51] <Klaus-Krefeld> Hallo IchGuckLive
[06:20:58] <IchGuckLive> servus
[06:21:21] <IchGuckLive> lass mich bitte erst die logs lesen damit weis um was es geht
[06:21:32] <Klaus-Krefeld> schaue mir gerade nochmal die Videos an , um vielleicht meine Maschine mit LinuxCNC zu betreiben
[06:21:55] <Klaus-Krefeld> ok keine Hektik ich habe Zeit
[06:22:14] <Loetmichel> Klaus-Krefeld: if you come over to euirc server on #cnc-channeld: there we speak german
[06:22:14] <IchGuckLive> Ich ab heute auch RENTE
[06:22:16] <Loetmichel> :-9
[06:22:19] <Loetmichel> )
[06:22:30] <Loetmichel> -d
[06:22:37] <Deejay> IchGuckLive, alte sack ;-) *duck*
[06:22:39] <Deejay> +r
[06:23:27] <IchGuckLive> Klaus-Krefeld: es gibt keien treiber für den parallelport das geht alles von hause aus
[06:23:42] <IchGuckLive> Klaus-Krefeld: isses ein rotes oder blaues TBA
[06:23:52] <Loetmichel> HRRRMPF
[06:24:04] <Deejay> gesundheit, Loetmichel
[06:24:08] <Loetmichel> the chip is calles TB6560, NOT TBA 6560
[06:24:18] <Klaus-Krefeld> okay , habe nur in dem Video gesehen das es aufgelistet war
[06:24:25] <Klaus-Krefeld> es ist das blaue Board
[06:24:33] <IchGuckLive> tha A stands for 3.5A not 2.5 New HQ
[06:24:42] <Klaus-Krefeld> 3,5
[06:24:59] <Loetmichel> IchGuckLive: you are, as always: wrong
[06:25:09] <IchGuckLive> agrees
[06:25:29] <Loetmichel> the tb6560 can do 3.5A
[06:25:55] <Loetmichel> and here is still english the main langugage. do the german things in query or make yourself a channel or whatever
[06:26:02] <IchGuckLive> the new brand on the chip is A no more HQ
[06:26:38] <IchGuckLive> since 6600 came out the production line changed branding i think
[06:27:07] <Loetmichel> or you are making stuff um
[06:27:14] <Loetmichel> there IS no tba6560
[06:27:25] <Loetmichel> that would not fit the toshiba numbering scheme
[06:27:32] <Loetmichel> tba are audio amoplifiers
[06:28:10] <Loetmichel> <- getting pissed again, like tis morning when all my co-workers fled to the other office upstairs
[06:29:14] <IchGuckLive> michel you shoudt change your DEODORAND !"
[06:29:26] <Loetmichel> because they are niot used to me getting loud and angry
[06:31:38] <IchGuckLive> agrees once more
[08:48:43] <JT-Shop> what a nice morning in Swamp East Missouri
[08:48:57] <IchGuckLive> its raining here
[08:49:45] <jdh> poured here again on the way home yesterday then cleared up enough to go riding.
[08:57:21] <JT-Shop> I went out riding yesterday and got some wonderful chigger bites
[09:00:12] <jdh> heh, don't ride through swamp trails!
[09:00:22] <jdh> I did 30 road miles
[09:00:43] <JT-Shop> the trails are in pretty good shape and in the hills so no swamp to cross
[09:01:14] <JT-Shop> I put an odometer on the bike but can't figure out how to zero the miles
[09:18:18] <jdh> hold the right button for 3 seconds
[09:18:30] <jdh> or the left. or some combination of the above.
[09:24:52] <skunkworks> http://pastebin.com/FucZuEzN
[09:25:11] <skunkworks> I remember there being a way to fix this.. but I cannot find it
[09:26:11] <jdh> looks like your DNS is hosed?
[09:26:32] <jdh> does 'host security.debian.org' return anything?
[09:26:40] <cradek> do you have a network connection at all?
[09:26:46] <skunkworks> heh - yes.
[09:27:00] <skunkworks> (yes I have network connection)
[09:27:38] <cradek> usually the dns server information would come from the dhcp server
[09:28:27] <Valen> try cat /etc/resolv.conf
[09:28:47] <Valen> it'll tell you what its using for your nameserver
[09:29:16] <skunkworks> huh. I ran it again and only got 'Could not resolve 'security.debian.org''
[09:29:27] <pcw_home> automata: (should you read the log)
[09:29:29] <pcw_home> if you hosed the user config area with the wrong type of bitfile, just re-write the proper bitfile with mesaflash
[09:29:40] <skunkworks> maybe it is network issues
[09:30:21] <Valen> I suggest doing cat /etc/resolv.conf
[09:30:29] <Valen> then ping whatever the nameserver you get is
[09:36:44] <jdh> or echo nameserver 8.8.8.8 >>/etc/resolv.conf and see if it gets better.
[09:42:36] <skunkworks> jdh - it is dns issues.. I changed it to 8.8.8.8 and bam
[09:43:28] <jdh> BAM!
[09:43:44] <skunkworks> exactly
[09:43:55] <jdh> and as a side effect, the google can track you even better now.
[09:44:02] <skunkworks> Yay!
[09:44:56] <skunkworks> I was reading the error as I didn't have the gpg keys setup correctlt
[09:56:40] <CaptHindsight> AMD 4 core APU's are behaving well now with the new 3.4.9 (pae)RTAI and Wheezy, you have to turn off kernel mode settings and use isolcpus=0.1.2 and the 25uS base thread runs <8uS
[10:07:50] <FinboySlick> CaptHindsight: If you isolcpus=0,1,2, aren't you forcing single-core?
[10:09:12] <FinboySlick> I've had mild success forcing just linuxcnc to a single isolated core (leaving the remaining ones for the system). Been a while since I played with it though.
[10:10:33] <CaptHindsight> this is with RTAI
[10:11:31] <CaptHindsight> and the scheduler is RTAI is a bit broken right now
[10:12:16] <CaptHindsight> since it has kernel and user space I believe that this forces real time to run on the last core only
[10:12:29] <FinboySlick> OK, so setting cpu affinifty for the linuxcnc processes to your isolated core doesn't yield expected results?
[10:13:01] <CaptHindsight> isolcpus is bassakwards in RTAI right now
[10:13:20] <FinboySlick> Alright.
[10:14:13] <CaptHindsight> what should be (or was correct) isolcpus=3 for a 4 core is now isolcpus=0,1,2 to get the same result
[10:15:34] <FinboySlick> CaptHindsight: It doesn't force *everything* to the last core?
[10:18:04] <CaptHindsight> FinboySlick: with things so broken I'm not sure yet, I'm checking
[10:23:26] <FinboySlick> BTW, are fowler tools cheapo stuff or did I just find really good deals?
[10:26:38] <CaptHindsight> FinboySlick: it looks like it runs RTAI on the last core but non RT on the first 3 cores
[10:27:20] <FinboySlick> Well, that's good... Though definitely ambiguous.
[10:27:44] <CaptHindsight> getting used to wheezy and not all the utils are installed yet
[10:28:50] <CaptHindsight> RTAI has the two kernel approach as did Xenomai up until v2
[10:29:18] <CaptHindsight> now xenomai for v3 is going the RT way with one kernel only
[10:34:12] <CaptHindsight> xenomai v3 discontinues kernel space APIs
[10:34:40] <CaptHindsight> so they don't seem to be concerned about losing 3-20uS by abandoning kernel space
[10:48:00] <CaptHindsight> FinboySlick: I just tried it on ubuntu 12.04 with 3.4.9 pae RTAI and the system monitor shows only 1 core being used
[10:48:27] <CaptHindsight> so it's hard to tell since RTAI and the tools in the distros are so broken
[10:57:32] <CaptHindsight> FinboySlick: I'll have to do ore testing with isolcpus and setting the CPU affinity
[10:58:14] <CaptHindsight> my understanding is that you set isolcpus to isolate that cpu from running any regular tasks
[10:58:51] <CaptHindsight> then you use CPU affinity to assign RTAI taska to just that isolated cpu core
[10:59:24] <FinboySlick> CaptHindsight: The doc says that isolcpu will remove a cpu from the kernel SMP list. As such, the only way to run on a cpu listed in isolcpu would be to explicitly set affinity.
[10:59:45] <CaptHindsight> we agree
[11:00:53] <CaptHindsight> now with RTAI being broken we'll have to see what settings actually work vs what the docs say
[11:01:19] <FinboySlick> CaptHindsight: Indeed.
[11:01:20] <CaptHindsight> it looks like it working in wheezy, but not with precise
[11:13:00] <mozmck> With Xenomai going to the RT kernel, what advantage do they offer over just using the RT kernel?
[11:14:47] <CaptHindsight> mozmck: with the xenomai v3 it's going to be about the same
[11:17:26] <CaptHindsight> the preempt_rt project said they down to one main dev with no funding
[11:19:18] <CaptHindsight> mozmck:
http://xenomai.org/introducing-xenomai-3/
[11:43:17] <mozmck> Yeah, I saw that, but I'm not sure why xenomai needs to exist anymore if it's just a layer on top of preempt-rt now.
[11:45:28] <automata> hi pcw_home
[11:47:29] <pcw_home> Hi automata
[11:48:04] <automata> i accedintely put x25 bitfile in an x16 5i24
[11:48:27] <automata> the card gives a red light for fallback
[11:49:08] <automata> i changed the jumper w7 to load the alternate eeprom
[11:49:25] <automata> and the card comes up allright...
[11:50:02] <automata> question is how do i write a correct bitfile to the first eeprom that is hosed
[11:51:29] <automata> i wrote a new x16 bitfile to another 5i24 card and that works allright
[11:52:04] <automata> so i am ble to write bitfiles to 5i24 using mesaflash
[11:52:43] <automata> but i have not fiddled with the hosed card inncase i mess it up further
[11:56:02] <pcw_home> automata: if you get a blinking red light (fallback indication), do no change any jumpers, simply reflash with correct bitfile
[11:56:26] <automata> card is not recognized by lspci
[11:56:37] <automata> so cant flash it
[11:57:36] <automata> but changing the w7 jumper gets the card recognized by lspci and i can load hm2_pci
[11:57:56] <pcw_home> OK in that case, boot on secondary EEPROM, move jumper back to primary and reflash
[11:58:49] <automata> so i move the jumper while the card is in the slot and power is on??
[11:58:55] <pcw_home> yes
[11:59:19] <automata> just a little scared to do that ;-)
[11:59:34] <automata> but i'll try it first thing in the morning
[11:59:42] <pcw_home> only way to re-write the primary EEPROM
[12:00:01] <automata> thanks
[12:00:05] <pcw_home> (if it wont boot)
[12:00:30] <pcw_home> fallback does not work if you write a valid but wrong bitfile
[12:00:56] <automata> yup.. that is what i discovered!!
[12:01:19] <automata> red light is continuously on
[12:01:22] <pcw_home> it work fine if you write garbage or interrupt the write
[12:02:05] <pcw_home> but not with a valid but incorrect bit file
[12:02:41] <pcw_home> probably mesaflash should have not allowed the write
[12:03:01] <automata> we should look into that...
[12:03:37] <automata> ill take a look at mesaflash code too right now and see how that can be done
[12:04:42] <gene78> I can't loadrt a debounce module with cfg!=1. Ideas?
[12:04:50] <automata> card has an id and so the bitfile also lists the fpga part numeber
[12:05:12] <pcw_home> Theres no low level way to check FPGA on a 5I24 size but since the IDROM is always available
[12:05:13] <pcw_home> it can be checked there
[12:05:24] <automata> those 2 can be compared
[12:05:35] <pcw_home> Yeah
[12:06:13] <pcw_home> not needed on 6I24 since like 6I25 it can always be fixed via GPIO bits on bridge
[12:06:39] <automata> we can have a default option for checking which can be overriden by a switch
[12:07:04] <automata> ie option on the command ine
[12:07:45] <automata> also in case of no idrom on the fpga, we can turn off the checking
[12:08:12] <automata> asuming that no idrom implies ppl kind of know what they are doing
[12:08:25] <pcw_home> Yes if no IDROM/no PCI must be PCIE or theres no hope of proceeding
[12:08:35] <automata> yup
[12:08:53] <automata> can u guide me to latest sorece for mesaflash
[12:09:07] <gene78> too bad I can't spell cfg.....
[12:09:31] <automata> last i heard it was on micges personal github account
[12:09:49] <IchGuckLive> hi all B)
[12:09:52] <pcw_home> yep that where it is
[12:10:23] <automata> do u have a link handy??
[12:11:02] <pcw_home> just google mesaflash (thats what I d0)
[12:11:35] <automata> k
[12:13:31] <pcw_home> latest bitfiles support ICAP writes so its possible to load/boot the fallback config without CPU reboot
[12:13:33] <pcw_home> which might be a safer way to test unknown to be working bitfiles
[12:13:50] <automata> https://github.com/micges/mesaflash
[12:14:58] <automata> is the PCI bus slave code is implemented in the toppcihostmot2.vhd file?
[12:16:27] <pcw_home> yes
[12:17:08] <automata> seems a bit terse for a complete pic bus slave...
[12:17:31] <pcw_home> not much involved for a PCI target only
[12:18:11] <pcw_home> Do-able in a small CPLD
[12:18:27] <automata> huh!! never thought it to be so small...
[12:19:25] <pcw_home> bus masters are quite a bit more complicated
[12:20:06] <automata> how come the cypress guys make such
[12:20:13] <automata> BIG IC's
[12:20:45] <automata> for the bus slaves
[12:23:04] <pcw_home> Well in our case the "local bus" is simple, synchronous and direct and we only have one BAR so not a lot there
[12:24:28] <automata> ok
[12:25:41] <pcw_home> it only took me a couple days to write it
[12:25:42] <pcw_home> and about 4 million reboots :-)
[12:30:23] <automata> :-)
[12:31:00] <automata> do you have some pointers to PCI documentation?
[12:31:28] <pcw_home> design by correction vs correct by design
[12:31:36] <automata> haha
[12:32:00] <pcw_home> I just used the Mindset PCI book
[12:35:37] <pcw_home> we also have the PCI sig PCI and PCIE databooks (before they got insanely expensive)
[12:36:09] <automata> ok
[12:36:26] <pcw_home> but the Mindset book is sufficient
[12:37:37] <automata> no google hits for "mindset pci book"
[12:38:15] <IchGuckLive> automata: only set on his mind O.O
[12:39:18] <automata> ichgucklive: I guess that is the only way to get something as big as a PCI slave done!!
[12:42:05] <IchGuckLive> thats the way the world an humanity goes forward
[12:46:33] <pcw_home> sorry _mindshare_
[13:05:55] <IchGuckLive> im off fr today has been a long day starting at 3:15 am BYE till tomorrow
[16:21:14] <Deejay> gn8
[16:52:57] <SquirrelCZECH> any tips
[16:53:03] <SquirrelCZECH> for paper labels?
[16:53:06] <SquirrelCZECH> *cable labels
[16:53:11] * SquirrelCZECH needs something nice
[16:53:14] <Tom_itx> of what sort?
[16:53:25] <SquirrelCZECH> reprap i3
[16:53:28] <SquirrelCZECH> http://squirrel.veverak.org/photo/IMG_1652.jpg
[16:53:30] <SquirrelCZECH> (bad photo)
[16:53:44] <SquirrelCZECH> but I suppose it's impossible to "track" the cable in this one
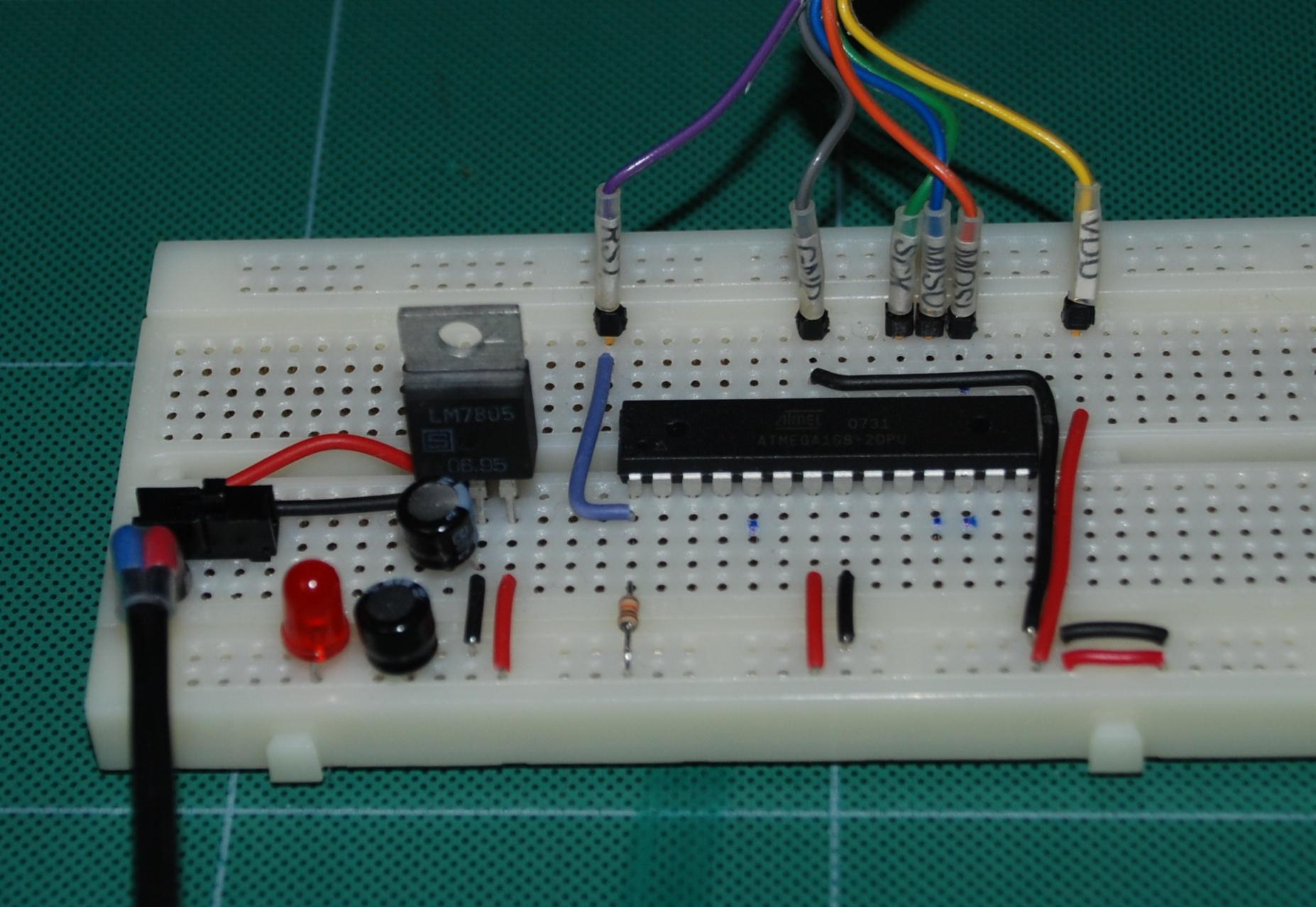
[16:53:53] <Tom_itx> i do this with single wires:
http://tom-itx.no-ip.biz:81/~webpage/how_to/atmega168/breadboard_basic_side.jpg
[16:54:08] <Tom_itx> print on a label and heat shrink over it
[16:54:30] <andypugh> Heat-shrink ans a Dymo machine (“Permanent” style tape) works nicely.
[16:54:32] <Tom_itx> you can get a whole list of em on a single label
[16:54:55] <SquirrelCZECH> yeah
[16:54:59] <SquirrelCZECH> heat shrinks sounds nice
[16:55:48] <andypugh> Or, more cheaply:
http://www.amazon.com/HellermannTyton-RO514-Rite-On-Self-Laminating-Dispenser/dp/B00D8PO0QO/ref=sr_1_3?ie=UTF8&qid=1407965814&sr=8-3&keywords=rite+on+label
[16:55:58] * SquirrelCZECH thought about finding somethng in local stationary
[16:56:43] <andypugh> Ah, wait, you are in CZ?
[16:57:12] <andypugh> http://cz.rs-online.com/web/c/?sra=oss&r=t&searchTerm=rite-on&x=-784&y=-73
[16:58:18] <SquirrelCZECH> perfect :D
[16:59:05] <andypugh> Though RS also do short lengths of glue-filled heat-shrink ideal for Dymo tape labels. (And a Dymo machine is good to have).
[16:59:24] <SquirrelCZECH> ok
[16:59:26] <SquirrelCZECH> well
[16:59:31] <SquirrelCZECH> it's only for this project :D
[17:00:23] <andypugh> I have
http://www.amazon.co.uk/Dymo-Label-Manager-280-Maker/dp/B00AOHBRJM but there are cheaper ones.
[17:00:36] <andypugh> You will find yourself labelling everything you own :-)
[17:01:31] <andypugh> Right, let me see if the milling machine finished the part before reaching the vice jaws :-)
[17:01:43] <SquirrelCZECH> :D
[17:47:06] <koss> http://www.amazon.com/exec/obidos/ASIN/B00464E5P2/fpv-20/
[17:47:09] <koss> cheap
[18:50:29] <MC500> anyone up for helping with PID tuning???
[18:52:11] <andypugh> MC500: Have you seen JT’s tutorial?
[18:52:19] <andypugh> Torque-mode or Velocity-mode?
[18:53:19] <MC500> I think its Torquie but I am not sure how to tell
[18:53:59] <MC500> This was a working machine at one point ant I blew the hard drive
[18:54:07] <MC500> so I am trying to get it back to where it was
[18:54:13] <andypugh> Does the drive see the encoder data? Are there tachometers? If neither then it can’t be velocity-mode.
[18:54:33] <MC500> yes the encoders work fine and I measured the feed back on the hal pin and they match exatly
[18:55:19] <MC500> the problem I am having is if I set everyting to 0 and increase P untill it ocilates, that never happens
[18:55:38] <andypugh> Sorry, perhaps the question wasn’t clearly expressed. Does the servo drive have a connection to the encoders or to some tachometers? (It is taken for granted that LinuxCNC sees the encoder data)
[18:55:43] <MC500> Velocity has alot to do with it and there is never metnion what to set that to
[18:56:32] <andypugh> How high have you taken P?
[18:56:55] <MC500> well the servo motors are AC and hooked up to Baldor drives which are hooked up to EMC and then the encoders
[18:56:59] <MC500> 30000
[18:57:03] <MC500> or more
[18:57:07] <MC500> just playing around
[18:57:18] <MC500> what should I start ot with for Velocity
[18:57:36] <andypugh> It depends on so many things.
[18:57:52] <PCW> what happens when you try to jog with P set at 30000?
[18:58:00] <MC500> well if I go beyond 10 in velocity it starts to zing all over the place
[18:58:13] <PCW> zing meaning?
[18:58:22] <andypugh> “velocity” meaning?
[18:58:27] <MC500> axis moves real fast and error
[18:58:55] <PCW> can you jog your axis at all?
[18:58:59] <andypugh> You still haven’t said whether the encoders conect to the drives.
[18:59:17] <MC500> sorry MAX_VELOCITY in the the calibration
[18:59:41] <MC500> the encoders connect to the sevo to go card
[19:00:02] <MC500> which is the ISA card I am using
[19:00:04] <PCW> can you jog at all?
[19:00:34] <MC500> yea some axis work ok with old configurations I have dug up othes dont
[19:00:46] <MC500> Ithe X axis I can jog but it errors
[19:00:54] <MC500> the y and z work fine If I go slow
[19:01:02] <MC500> A is the same as X
[19:01:38] <MC500> A is rotary
[19:01:46] <andypugh> So the actual drive has no idea what the motor is doing? (other than perhaps some Hall sensors for commutation?)
[19:01:51] <PCW> what are your ferror limits? You probably need to make them large temporarily while tuning
[19:02:57] <MC500> drive as in the ampifier or the motor? but yea either way its through the stg isa card not directly hooked up
[19:03:26] <MC500> Linear scales on 3 axis direct read and the 4th is rotary axis directly connected
[19:04:52] <PCW> so first widen ferror limits
[19:04:53] <PCW> then verify feedback is correct for all axis (doesn't runaway when jogged)
[19:04:55] <PCW> then proceed to tune
[19:07:04] <PCW> ( you need to know if there are torque or velocity mode drives to determine tuning strategy)
[19:07:04] <andypugh> Typically a velocity mode drive has encoder wires (or tach wires) from the motor to the servo-amp, and then encoder and velocity command wires from the Servo Amp to the PC. A torque mode setup typically has wires from the encoder on the motor direct to the PC, and other wires from the PC to the servo-amp to send the torque request.
[19:07:05] <PCW> If these are older DC brushed drives they are most likely velocity mode
[19:07:27] <andypugh> He said they are Baldo AC drives/motors
[19:07:46] <MC500> they are Baldor A/C servo motors with Baldor amps
[19:07:56] <MC500> or frequency drives I guess
[19:08:40] <PCW> in any case first step is widen ferror limits so it doesn't just fault immediately
[19:09:18] <MC500> FERROR = 1.270 MIN_FERROR = 0.254
[19:09:31] <MC500> for the axis in question...
[19:09:36] <MC500> cool thanks I will try that
[19:09:37] <PCW> mm or inch?
[19:09:42] <MC500> inch
[19:09:56] <andypugh> Maybe already wide enough then
[19:10:03] <MC500> oh
[19:10:17] <andypugh> Well, 1” for each should be OK.
[19:10:38] <andypugh> (as long as you stay more than 1” from the hard stops)
[19:10:42] <MC500> I will try that and see if it goes better
[19:11:21] <PCW> Yeah 1 inch for all should be safe (it wont run any better but you should be able to see whats happening)
[19:11:55] <MC500> cool thank you
[19:12:31] <andypugh> Increasing P until it oscillates only works if you are trying to make it move at the same time
[19:14:02] <MC500> ok how would I make it move at the same time.. I am just jogging it in manual mode
[19:14:24] <MC500> I am sending it back and forth an inch
[19:15:07] <andypugh> That’s one way, and certainly that’s how I started with my machine (which, incidentally, I decided I should try re-tuning today)
[19:15:33] <andypugh> An inch might be a bit far actually.
[19:15:52] <andypugh> Have you found Halscope? That can be rather useful.
[19:16:01] <MC500> well ferror seemd to open it up, it moves 2 inches before it errors now
[19:16:06] <FinboySlick> I'd be interested to learn what velocity or torque mode implies too. I assume that it's internal to the drive and has to do with how it maintains or moves to an encoder position. Does it mean that it'll try to vary one of those variables until the position is on target?
[19:16:42] <MC500> this is such a slow computer and hal scope is very slow... and I have not figured out how to use it.. what signals should I be looking at in hal scope?
[19:17:10] <andypugh> It refers to what the effect of your control input has on the drive. On a velocity-mode drive 5V means “move the motor at half speed”. On a torque-mode drive it means “half of max current please"
[19:17:47] <andypugh> Scope motor-pos-cmd, motor-pos-feedback and f-error
[19:18:03] <FinboySlick> andypugh: Got it :) Thanks.
[19:19:47] <zeeshan|2> man this is driving me insane. im bonding 3 layers of shape memory polymer, using an adhesive, to stainless 304 sheet. i did a peel test and this is the results:
http://i.imgur.com/NAphyrM.png
[19:20:01] <zeeshan|2> i wonder why im getting a huge force spike in the early bits of displacement
[19:20:02] <andypugh> It does take some working out does Halscope. The position and zoom controls at the top can be confusing. left of the bar on the progress line is pre-trigger, and right is post-trigger. You can move the bar around, and often it is useful to move the trigger point to the right of the view screen and put the scope in Roll mode. But to get a static trace to analyse you would go the other way and trigger a one-shot on a rising
[19:20:02] <andypugh> edge of motor-pos-cmd.
[19:20:13] <zeeshan|2> maybe the poylmer is stretching?
[19:20:35] <CaptHindsight> FinboySlick: bottom of page
http://wiki.linuxcnc.org/cgi-bin/wiki.pl?The_Isolcpus_Boot_Parameter_And_GRUB2
[19:20:43] <Valen> how are you doing your test zeeshan|2?
[19:20:53] <zeeshan|2> tensile tester
[19:20:58] <Valen> got a picture?
[19:21:18] <FinboySlick> CaptHindsight: Results of your tests?
[19:21:19] <zeeshan|2> hm i gotta take one for a presentation too. brb
[19:21:35] <CaptHindsight> FinboySlick: yes
[19:21:39] <andypugh> How are you attaching to the tester? Do you have a stress-relieveing glue-fillet there at the beginning?
[19:22:51] <MC500> OK. I have MAX_VELOCITY set to 5 and P set to 2000 everything else is 0 (cept scale) I jog it 1 inch and it goes 2 inches in the correct direction and errors out
[19:22:55] <andypugh> MC500: Have you seen:
http://www.gnipsel.com/linuxcnc/tuning/index.html
[19:23:32] <FinboySlick> CaptHindsight: And from what I recall earlier, with 0,1,2 every process runs on 3?
[19:23:44] <MC500> just book marked it, I have not seen that one yet...
[19:25:10] <CaptHindsight> FinboySlick: it ends up that the linuxcnc latency-test and rtai use different algorithms to find a core with the least amount of threads
[19:25:53] <andypugh> Goodnight chaps
[19:26:11] <FinboySlick> So they run on one of those isolated cores and leave the remainder of the system on 3?
[19:26:35] <MC500> I just set P to 90000 and not much differance it still goes 2 inches in either direction I tell it when I jog 1 inch
[19:28:09] <CaptHindsight> FinboySlick: what is supposed to happen and what actually happens are not clear yet, since RTAI broke something
[19:28:56] <zeeshan|2> like my PLATES?
[19:28:57] <zeeshan|2> http://i.imgur.com/O6awtA6.jpg
[19:28:57] <zeeshan|2> :D
[19:29:27] <FinboySlick> zeeshan|2: Not smooth enough, start over.
[19:29:31] <FinboySlick> ;)
[19:29:34] <zeeshan|2> =(
[19:29:43] <zeeshan|2> http://i.imgur.com/9lQ9vzx.jpg
[19:29:45] <zeeshan|2> my bulge tester
[19:30:42] <zeeshan|2> valen
[19:30:43] <zeeshan|2> still alive?
[19:30:49] <zeeshan|2> http://i.imgur.com/Ntsw1P2.jpg
[19:30:52] <zeeshan|2> thats what the sample looks like
[19:30:59] <zeeshan|2> imagine that inside the grips of a tensile tester
[19:31:04] <FinboySlick> Automotive/flake paint or is it grain in the picture? Either way, cool choice of color.
[19:31:22] <zeeshan|2> anodized
[19:31:23] <Valen> so you glue the two disks together?
[19:31:24] <CaptHindsight> FinboySlick: isolcpus is supposed to isolate the defined core from the general kernel SMP balancing and scheduler algroithms. Then RTAI uses that core for itself
[19:31:30] <Valen> then peel them apart somehow?
[19:31:37] <zeeshan|2> valen its got 3 layers of shape memory polymer
[19:31:45] <zeeshan|2> cause i was trying to avoid "stretching" of the polymer
[19:31:55] <zeeshan|2> and those are glued to a stainless sheet
[19:31:58] <zeeshan|2> and its pulled apart
[19:31:59] <zeeshan|2> 180 degrees
[19:32:04] <CaptHindsight> zeeshan|2: NO! I won't help you. :p
[19:32:13] <Valen> sliding or vertically apart?
[19:32:22] <zeeshan|2> vertically apart like:
[19:32:37] <zeeshan|2> http://128.121.92.221/media/Pictures-Used/180peel.gif
[19:32:57] <zeeshan|2> interesting.
[19:33:00] <FinboySlick> CaptHindsight: Yes, that's what I expected too. It's odd.
[19:33:01] <zeeshan|2> i googled peel test and this came up
[19:33:05] <zeeshan|2> http://info.admet.com/Portals/70514/images/ASTM%20D1876%20T-Peel%20Test%20Report.jpg
[19:33:09] <zeeshan|2> it does spike!
[19:33:11] <zeeshan|2> !!
[19:33:18] <Valen> I imagine it would
[19:33:23] <zeeshan|2> but i cant explain why
[19:33:34] <Valen> before you break the surface contact you have a larger surface area
[19:33:57] <Valen> once it breaks and starts peeling only the bit at the peel point is doing work
[19:34:32] <Valen> thats my suspicion anyway
[19:34:54] <zeeshan|2> imthinking its something to do with
[19:35:04] <zeeshan|2> "static friction" vs "kinematic friction"
[19:35:11] <zeeshan|2> usually static friction values are higher..
[19:35:32] <zeeshan|2> basically similar reason to yours
[19:36:11] <zeeshan|2> either way
[19:36:15] <zeeshan|2> even at 25N
[19:36:27] <zeeshan|2> that exceeds the spec sheet rating
[19:36:29] <zeeshan|2> so im good
[19:36:39] <Valen> I don't think thats it really
[19:36:40] <zeeshan|2> fakin adhesive is no good for what im doing
[19:36:56] <Valen> the mechanism feels different
[19:37:11] <Valen> you could find out if you stopped your pull but kept tension
[19:37:11] <zeeshan|2> valen like if you take a piece of tape
[19:37:13] <zeeshan|2> and you pull on it
[19:37:22] <zeeshan|2> you notice how it takes some strength to pull it off in the begining
[19:37:29] <zeeshan|2> but asap it pulls off, it flies off?
[19:37:31] <Valen> I'm saying the mechanism here is different to static vs dynamic friction
[19:37:53] <FinboySlick> Valen: Before it starts peeling, you still only have the adhesive at the peel point holding it together, no?
[19:38:03] <zeeshan|2> FinboySlick: yea thats what im thinking too
[19:38:18] <zeeshan|2> usually with fluids
[19:38:46] <zeeshan|2> the shear rate is proportional to the shear force
[19:38:51] <zeeshan|2> but with like non newtonian fluids
[19:38:51] <Valen> I think you have more stick before it starts peeling, as the glue is normally stretchy, so as the first part starts stretching you get a longer line of glue involved
[19:39:03] <zeeshan|2> the faster you "shear" the more force feedback there is
[19:39:20] <FinboySlick> Valen: Otherwise, his spike would be overal length divided by peel point length times higher.
[19:39:46] <Valen> as I said, he can test it by stopping his pull and keeping it under tension
[19:39:59] <Valen> if what you say is right he should get another spike
[19:40:05] <zeeshan|2> valen
[19:40:08] <zeeshan|2> ill try that next time i have time
[19:40:11] <zeeshan|2> im gonna stop the test
[19:40:13] <zeeshan|2> and start it again
[19:40:21] <zeeshan|2> and see if i get an equal magnitude spike
[19:40:27] <Valen> (actually if what you say is correct the force should have some exponential speed component)
[19:40:56] <jdh> z: have you cut anything with your lathe?
[19:41:01] <zeeshan|2> jdh yes
[19:41:03] <zeeshan|2> why
[19:41:41] <zeeshan|2> WHY jdh WHY!
[19:42:05] <FinboySlick> zeeshan|2: Quick, show him the plates!
[19:42:14] <zeeshan|2> lol those were done manually
[19:42:34] <zeeshan|2> http://i.imgur.com/wvdhjOG.jpg
[19:42:41] <zeeshan|2> top die was done using cnc
[19:43:47] <jdh> cool
[19:44:20] <FinboySlick> zeeshan|2: The plates were done with a manual lathe you mean? Or you have super-uniform hacksaw skills?
[19:44:30] <zeeshan|2> manual lathe
[19:46:33] <CaptHindsight> zeeshan|2: how high should the peel force be to be adequate?
[19:46:58] <zeeshan|2> 4x times what im seeing right now
[19:47:01] <zeeshan|2> 100n
[19:47:24] <CaptHindsight> bonding stainless to you memory polymer?
[19:47:28] <zeeshan|2> and for normal human beings.. like me
[19:47:32] <zeeshan|2> that works out to 25lb or so
[19:47:33] <CaptHindsight> you/your
[19:47:37] <zeeshan|2> CaptHindsight: yers
[19:47:44] <zeeshan|2> problem is
[19:47:50] <zeeshan|2> there WILL be mismatch after forming
[19:48:13] <zeeshan|2> because of relaxation and residual stresses
[19:48:22] <zeeshan|2> if you have a strong enough adhesive, itll stop it
[19:48:31] <CaptHindsight> and you don't want the SS to warp
[19:48:41] <zeeshan|2> ss wont warp
[19:48:46] <zeeshan|2> at least it hasnt so far
[19:49:05] <zeeshan|2> http://i.imgur.com
[19:49:06] <zeeshan|2> er
[19:49:10] <CaptHindsight> ok so you need another adhesive
[19:49:10] <zeeshan|2> http://i.imgur.com/ogbnH0E.jpg
[19:49:14] <zeeshan|2> here is a stainless cup formed
[19:49:28] <zeeshan|2> http://i.imgur.com/8xzIZkg.jpg
[19:49:42] <zeeshan|2> here is what a laminate looks like after a little bit of forming
[19:50:21] <zeeshan|2> http://i.imgur.com/7Y3WeIe.jpg
[19:50:26] <zeeshan|2> heres me saying 'fak it lets see what happens'
[19:50:27] <CaptHindsight> whats the texture of the SS that you are bonding to?
[19:50:32] <zeeshan|2> brushed stainless
[19:51:17] <CaptHindsight> what can you say about the memory polymer? what is the chemistry?
[19:51:29] <zeeshan|2> top secret
[19:51:29] <zeeshan|2> :(
[19:51:41] <zeeshan|2> check this out cap
[19:51:43] <zeeshan|2> http://i.imgur.com/MxZSVHA.jpg
[19:51:55] <zeeshan|2> notice how the cup has "earing"
[19:52:05] <zeeshan|2> that only happens in aniostropic materials
[19:52:18] <zeeshan|2> so brush stainless is stronger in the rolling direction
[19:52:25] <zeeshan|2> but weaker in the 90 degree direction
[19:52:30] <zeeshan|2> that stuff shows up in forming tests
[19:53:19] <zeeshan|2> http://i.imgur.com/kx7f9sj.jpg
[19:53:26] <zeeshan|2> my beautiful circle cutting jig
[19:54:34] <CaptHindsight> zeeshan|2: what thickness is allowed for the adhesive?
[19:54:42] <zeeshan|2> unlimited
[19:55:59] <CaptHindsight> ss -- adhesive -- memoryPoly -- adhesive -- ss
[19:56:08] <CaptHindsight> is that the stackup?
[19:57:33] <zeeshan|2> no
[19:57:37] <zeeshan|2> ss adhesive polymer
[19:57:47] <CaptHindsight> ok, even easier
[19:58:18] <zeeshan|2> both ss and polymer has low surface strengths
[19:58:21] <CaptHindsight> well thats the fun of adhesives, inks and coatings
[20:01:19] <zeeshan|2> http://www.youtube.com/watch?v=3O05nyS6hwQ
[20:01:20] <zeeshan|2> rofl
[20:02:24] <CaptHindsight> flexibility typically gets you more adhesion but less tensile strength
[20:02:52] <zeeshan|2> CaptHindsight: one sign that i know its adhesion failure
[20:03:08] <zeeshan|2> is there is no residue of the adhesive on the ss304 after peel testing
[20:03:17] <zeeshan|2> usually when the adhesive is strong enough
[20:03:41] <zeeshan|2> but it's failing due to cohesion (ie the adhesive can't handle the shear stress for exampke)
[20:03:52] <zeeshan|2> you'll see chunks of the adhesive remanents on the base metal
[20:04:17] <CaptHindsight> so you found something good for the polymer but poor for SS
[20:04:24] <zeeshan|2> yes
[20:04:40] <zeeshan|2> i dunno if youve ever experimented with epoxy
[20:04:43] <zeeshan|2> but when that stuff fails
[20:04:51] <CaptHindsight> I make epoxies
[20:04:53] <zeeshan|2> theres epoxy left on both surfaces
[20:04:59] <zeeshan|2> the epoxy actually fails
[20:05:04] <zeeshan|2> CaptHindsight: hah :D
[20:06:01] <CaptHindsight> I work with epoxies, urethanes, polyesters, acrylics, methacrylates etc etc
[20:06:36] <CaptHindsight> we blend into inks, coatings, adhesives etc
[20:07:11] <zeeshan|2> you must be a competitor to 3m
[20:07:56] <CaptHindsight> not really, we do it for very specific applications
[20:11:04] <zeeshan|2> one thing the spec sheet is saying
[20:11:11] <zeeshan|2> is to hold it at 70C for 72 hours
[20:11:25] <zeeshan|2> aparently i can triple the peel strength
[20:11:41] <zeeshan|2> seems like a waste of heat :P
[20:12:42] <CaptHindsight> it might be solvent still flashing
[20:13:22] <CaptHindsight> they can also continue crosslinking for quite some time
[20:13:50] <CaptHindsight> it's a 2K system you mix before application?
[20:54:52] <pcw_home> MC500: looks to me like your feedback is backwards so it just runs away as soon as you try to move
[21:16:56] <PetefromTn_andro> Evening folks
[21:22:44] <XXCoder1> hey
[22:17:12] <skunkworks> not really a bug I guess....
http://www.machsupport.com/forum/index.php/topic,27119.msg195565.html#msg195565
[22:21:22] <zeeshan> skunkworks:
[22:21:29] <zeeshan> is mach4 literally a port over of linuxcnc for windows?
[22:21:32] <zeeshan> it looks so similar.
[22:22:03] <skunkworks> no clue
[22:44:37] <anarchos2> #<xscale> = 1.0
[22:44:54] <anarchos2> how do i set the scale with gcode on one of the demo ngc files?
[22:47:16] <anarchos2> i try typing #<xscale> = 0.25 (and yscale, zscale, etc) then click on the gcode below those lines and do a "run from here" but it still says it will be bigger than my table
[22:48:49] <skunkworks> anarchos2: from the file menu - select 'save gcode' - then you can save it - edit it - run it.
[23:09:10] <anarchos2> oooh, i see why it's giving me errors...the g code is programed so the zero point is in the centre and so the table needs to be able to move into "negative space" and I have mine setup for 0-8 inch, not -4 to 4 inches
[23:09:11] <anarchos2> hmm
[23:14:20] <archivist> anarchos2, just move your machine to the middle and "touch off"
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}