Back
[02:30:51] <DJ9DJ> moin
[03:52:17] <mrsun_> hmm i think i figured out my drag problem on the cnc machine, if i get 4 pulleys, put one in each corner .. rigidly, then pull a wire from the driving side and around the machine and back, fasten the driven side to the wire, and as the machine moves the driving side it will pull the other side with it using the wire =)
[03:52:21] <mrsun_> think this could work ? :)
[03:52:28] <mrsun_> no
[03:52:29] <mrsun_> it wont
[03:52:30] <mrsun_> dammit
[03:52:38] <mrsun_> it will pull int he oposit direction :P
[03:52:43] <mrsun_> if i do not cross it under the machine
[03:52:46] <mrsun_> i could do that also
[05:42:48] <jthornton> mrsun_, look at how a drafting table square is mounted using wire and pulleys
[06:54:36] <gonzo___> has anyone here used the mesa cards with 422 inputs, can answer a question?
[07:04:46] <archivist_herron> try asking the real question
[07:08:18] <skunkworks> pcw_home, I have a 8168 rtpinging right now. Using this rt_r8169.c
[07:08:19] <skunkworks> http://sourceforge.net/mailarchive/message.php?msg_id=31389885
[07:08:59] <skunkworks> I had to remark out #include <asm/system.h>
[08:27:35] <sirdancealot> so what do you guys think about the farmbot?
[08:28:01] <archivist> nothing because I never saw it
[08:29:05] <sirdancealot> http://wiki.farmbot.it/Welcome
[08:31:40] <sirdancealot> well thats how it 'could' look
[08:34:32] <jdh> that looks like a solution in search of a problem.
[08:34:42] <malcom2073> Heh, when you have a hammer
[08:34:42] <cradek> wow, no kidding
[08:34:53] <archivist> serious design error as a plow
[08:34:59] <cradek> plow, haha
[08:35:06] <jdh> someone got an arduino and was desperate to find a project for it.
[08:35:20] <cradek> and it's a sprinkler too
[08:35:36] <archivist> clue of forces involved at a farm needed
[08:35:37] <cradek> an arduino and a good heart
[08:37:40] <malcom2073> But hey, if you wanted to plant sunflower seeds in a pattern to make words you could read from an airplane... this would do it :)
[08:37:44] <archivist> plants also do not grow to a cnc amenable shape
[08:38:35] <cradek> the solution to people not having enough food is birth control, not cnc
[08:39:20] <cradek> I should start a kickstarter for "give everyone access to birth control"
[08:39:28] <cradek> all I'd need is a plan
[08:40:37] <jdh> first, get the pope on board.
[08:40:56] <skunkworks> he seems more open minded then the last bunch
[08:40:58] <cradek> seems there's a bit better chance lately
[08:41:18] <cradek> step 1. I become pope ... somehow
[08:41:19] <jdh> popes rarely breed
[08:41:22] <cradek> haha
[08:41:26] <archivist> its like those laser controlled tractors to get one extra row of carrots in a field
[08:42:10] <malcom2073> All the "advantages" of that thing, seem to be covered by the automated equipment they have now, except the open-source of course.
[08:42:19] <cradek> > The user experience will be similar to some video games such as SimCIty and Farmville
[08:42:56] <malcom2073> haha
[08:43:09] <malcom2073> There's the target market. People who don't farm anyway?
[08:45:40] <cradek> the idea of using some new kind of machinery to farm vertically is interesting
[08:45:54] <cradek> I bet there are some good ideas in here
[08:46:21] <malcom2073> I think it's a novel idea, but as archivist mentioned, there are some significant forces involved in farming. You'd need some serious horsepower and machine structure to accomplish that
[08:46:27] <malcom2073> seeding and watering is easy of course
[08:46:31] <malcom2073> force-wise
[08:46:32] <archivist> there is already some vertical stuff in Singapore
[08:53:59] <IchGuckLive> hi all B)
[08:54:04] <IchGuckLive> holiday in germany
[08:58:41] <ReadError> farmbot lol
[08:58:48] <ReadError> they dont even have pics of a built one?
[09:00:05] <archivist> it would be a broken one
[09:00:56] <IchGuckLive> farmbot is a wear thing
[09:01:10] <IchGuckLive> italian always do alot of wear things like berlusconie
[09:02:05] <IchGuckLive> in our university they plant salat in a spiral that rotates for 30 days to get them grown outwards inside a dome
[09:02:26] <IchGuckLive> every day 50 salats to the mensa
[09:03:57] <IchGuckLive> farmbot is consept on a palt growhousee style better to go chain and as long as the growhouse is
[09:06:41] <sirdancealot> all hail the hypnosalad
[09:07:19] <IchGuckLive> no sand no sun no ... just bio
[09:07:29] <archivist> I can see a use at a "weed" farm
[09:07:41] <archivist> wernt me guv it was the bot
[09:09:16] <jdh> hydroponics woudl be better for that in small areas
[09:12:40] <gonzo___> OK, full question.... The mesa cards that have 422 i/o, I can see that it's possible to use the outputs single ended, but is it possible to drive the inputs with single ended signals??
[09:14:14] <jdh> you might need a bias voltage
[09:15:07] <gonzo___> jdh, do you mean hold one of the diff pair at half rail?
[09:15:13] <jdh> yes
[09:15:39] <archivist> or convert your signal to differential
[09:15:40] <gonzo___> interesting. do youb know the diff threshold for the cards?
[09:16:36] <jdh> not offhand. You might ask PCW when he is around.
[09:17:02] <gonzo___> thanks, will do.
[09:21:47] <CaptHindsight> maybe if it could plant something that when eaten it would suppress the compulsion to control others
[09:23:16] <jdh> <pcw_home> then a 2.5 V threshold would be the best noise immunity wise
[09:26:11] <IchGuckLive> CaptHindsight: there is the fukushima field attempt
http://www.youtube.com/watch?v=F_WuJ9P1u-k
[09:26:13] <pcw_home> Which daughter card is this for?
[09:29:11] <CaptHindsight> IchGuckLive: that solution is only for growing food more efficiently, it doesn't do anything about the compulsive obsessive need to gain power problem
[09:31:12] <IchGuckLive> itsa a guess on seald farming in a hazzardes envirement to get clean food to peoples
[09:32:10] <IchGuckLive> its just a goverment projekt so its not mention about it
[09:32:18] <IchGuckLive> waste of money always
[09:34:21] <IchGuckLive> CaptHindsight: only the goods is free and lots of salat in the menas al the time as it is not alowed to sell it to the outside world O.O
[09:37:01] <IchGuckLive> im off till later By
[09:37:15] <gonzo___> pcw_home, I'm looking at the 7i47-S
[09:50:07] <jdh> is the -S newish?
[09:50:10] <pcw_home> its a bit awkward but possible: If you disable termination (a jumper option),
[09:50:11] <pcw_home> You can tie a set of inputs to 1.6V (for TTL levels) or 2.5V for 5V levels
[09:50:13] <pcw_home> and then use the other input of the pair as a single ended input
[09:52:13] <gonzo___> jdh, not sure. I've only just started looking at the interfacing side of the project
[09:53:11] <gonzo___> pcw_home, That sounds doable. The card has a useful combination of outputs, but the differential inputs were my concern.
[09:53:50] <pcw_home> if you have a bunch of TTL level inputs, you may be better off with another daughtercard
[09:54:01] <jdh> get another daughterboad for inputs (7i37ta)
[09:55:17] <gonzo___> that was the plan if I could not get a robust way of feeding the 7i47S
[09:55:22] <CaptHindsight> can your application get by with TTL or do you need 422?
[09:56:07] <gonzo___> I need a mix. and the 7i47S has an analogue out that is useful
[09:56:30] <jdh> I have a plain 7i47, the analog would be nice
[09:56:33] <CaptHindsight> I just got a 7i47s to play with
[09:58:48] <gonzo___> the analogue and 422 woudl give me options for spindle control (0-10V or RS485). the 422 outputs would be nice to allow me to drive differential if required.
[09:59:22] <JT-Shop> freaking head keeps moving up on the BP :(
[11:51:03] <ktchk> Hi any servo motor user arround?
[11:51:55] <ktchk> 80volt servo motor which power board and controller?
[11:52:31] <ktchk> encoder is 1000 per rev.
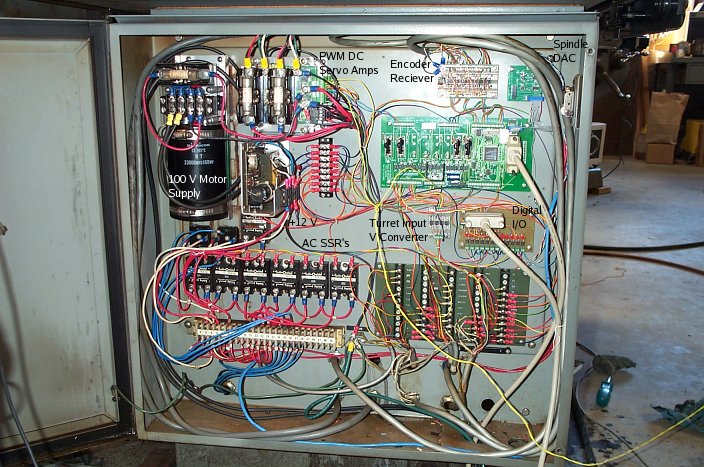
[11:53:56] <kwallace2> I use Pico's PWM amps.
http://pico-systems.com/pwmservo.html
[11:54:14] <kwallace2> Mesa should have something similar.
[11:55:00] <kwallace2> http://www.wallacecompany.com/cnc_lathe/HNC/00013-1a.jpg
[11:55:07] <ktchk> Can it take encoder feed back?
[11:55:27] <ktchk> Or have to go back via controller
[11:55:34] <ktchk> to pc
[11:57:57] <cradek> all the setups that work well with linuxcnc have the encoder feedback go to the pc
[11:58:22] <archivist> via an fpga card
[11:58:30] <ktchk> Via what controller?
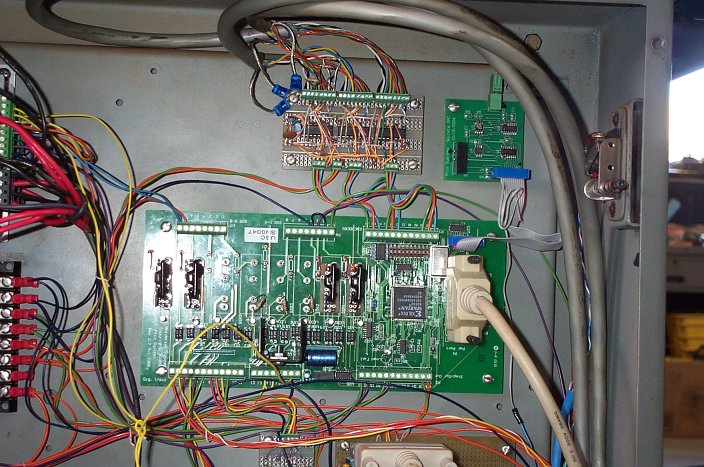
[11:58:36] <kwallace2> My encoders go to the Pico board then LinuxCNC does the feedback and PID.
[11:59:30] <ktchk> mesa?
[11:59:46] <kwallace2> The Pico FPGA board is the larger green board:
http://www.wallacecompany.com/cnc_lathe/HNC/00012-1a.jpg
[12:00:02] <IchGuckLive> hi all B)
[12:00:49] <kwallace2> A Mesa 5i25 could run Pico PWM amps well.
[12:01:00] <ktchk> Pico FPGA goes back printer board or a pci board?
[12:01:40] <ktchk> printer port
[12:02:20] <kwallace2> The Pico FPGA connects to an EPP parallel port. I would tend to use a 5i25 or 6i25 instead.
[12:03:47] <ktchk> What if compare to a stepper motor + 5x gear box?
[12:04:26] <kwallace2> Why do you need a gearbox?
[12:04:44] <jp_mill> so i need to attach a timing pulley to a lead screw with a threaded end. I cant turn the threads down. but i could add an extension on if i wanted to. thoughts?
[12:04:58] <IchGuckLive> i work on 5i25 7i76 with 6:1 gear
[12:05:12] <IchGuckLive> at 12m/min speed 0,1mm per step
[12:05:25] <ktchk> I need 1000 step per turn because the ball screw is 50mm per turn
[12:05:57] <IchGuckLive> ktchk: what is the needed precision per step
[12:06:01] <IchGuckLive> 0.01
[12:06:16] <ktchk> .025
[12:07:02] <IchGuckLive> thats 20000
[12:07:32] <IchGuckLive> thats a half stepper at 50:1
[12:07:42] <ktchk> IchGuckLive : 200 step times 5 is 1000
[12:07:57] <IchGuckLive> go for 400
[12:08:03] <archivist> jp_mill, you need to get that right so the pulley is concentric
[12:08:04] <IchGuckLive> always half step
[12:08:12] <kwallace2> I have a bias against steppers, but generally they have better low end torque, so your gear ratio could be less. And generally stepper systems are cheaper.
[12:08:32] <IchGuckLive> ktchk: half stepping gives you max speed at max force at max stepepr performance
[12:09:31] <jp_mill> archivist: yeah this is a different mill. Im thinking of making an adapter that threads on and then lock it with a bolt thru the center
[12:09:32] <ktchk> IchGuckLive: Ok but can you stop at half step?
[12:09:41] <IchGuckLive> yes
[12:09:43] <kwallace2> Without knowing the application well, I would tend to get a ball screw with a better pitch.
[12:10:06] <IchGuckLive> ktchk: did you ever open up a stepper
[12:10:18] <IchGuckLive> look inside and you will see
[12:10:20] <ktchk> kwallace2: Or have to change the already installed screw
[12:11:12] <IchGuckLive> ktchk: there are cheep 50:1 Nema23 at your nairbourhood in hongkong
[12:11:17] <ktchk> IchGuckLive: I open up and it lost magnetism and lost power
[12:11:41] <IchGuckLive> ktchk: dont agree on that
[12:12:06] <IchGuckLive> i changed bearing of mine lots of time and they work well
[12:12:09] <ktchk> IchGuckLive: Yes it do
[12:12:51] <kwallace2> My unipolar half stepping set up has less torque than full stepping because there are steps with one coil active and some with two. A bipolar micro stepping drive may not have this problem.
[12:12:58] <archivist> jp_mill, or use a better reference diameter after the thread
[12:13:16] <ktchk> IchGuckLive: 50:1 harmonic gear from japan is cheap
[12:13:26] <IchGuckLive> yes
[12:13:43] <skunkworks> I have a setup that morphs from half stepping at low feeds to full stepping at high feeds... :)
[12:13:51] <IchGuckLive> ktchk: worldcrm is around you it sells to here
[12:14:05] <IchGuckLive> 15USD
[12:14:17] <jp_mill> archivist:
http://imagebin.org/272617
[12:14:25] <ktchk> IchGuckLive: I do have a A axis built like that
[12:15:11] <IchGuckLive> i 2 but i use 90:1 for that
[12:15:33] <archivist> jp_mill, I am a bit surprised at how short that is
[12:15:43] <IchGuckLive> ktchk: there is another typhoon towards shanghai
[12:16:11] <ktchk> IchGuckLive: yes
[12:17:22] <jp_mill> archivist: Yeah it's what i have to deal with. It's a stock import mini mill i'm converting. my constrains are that i can't modify any of the stock hardware.
[12:18:02] <kwallace2> My understanding of losing motor magnetism has to do with the magnetic material. Old magnetic materials are easier to magnetise but also demag. Modern materials should not demag unless they are subjected to high fields or heat.
[12:18:15] <IchGuckLive> ktchk: are you going for nema 34
[12:18:32] <IchGuckLive> i woudt use a 8Nm or 12Nm on it
[12:19:15] <ktchk> IchGuckLive: Chinese have some thing different to NEMA
[12:19:25] <archivist> jp_mill, usually the balls screws come with an end you can couple too (eg oldham connector)
[12:20:21] <jp_mill> archivist: yeah thats the stock z-axis lead screw. No such luck
[12:20:33] <ktchk> IchGuckLive: I have to servo motor in hand but controllers are more expansive then stepper motor
[12:21:16] <archivist> jp_mill, even for handwheel ?
[12:21:33] <IchGuckLive> there is a omron service in HK that has cheep servo aplications around 120USD for 400W system
[12:21:50] <ktchk> IchGuckLive:
http://www.hko.gov.hk/wxinfo/currwx/tc_gis_c.htm
[12:21:55] <jp_mill> archivist: the handwheel uses a spur gear lower on the screw.
[12:22:18] <IchGuckLive> ktchk:
http://www.nrlmry.navy.mil/TC.html i trust the USGS
[12:22:43] <archivist> jp_mill, that is where the belt should probably drive too
[12:22:51] <ktchk> IchGuckLive: 20nm 100v 5a stepper motor is 100us
[12:23:21] <jp_mill> archivist: wanted to stay away from that too much play
[12:23:23] <IchGuckLive> ktchk:
http://stores.ebay.de/EasySupply?_trksid=p2047675.l2563 he got the MA860 in stock
[12:23:37] <jp_mill> archivist:
http://www.busybeetools.com/products/MILLING-MACHINE-WITH-DIGITAL-READOUT.html
[12:26:19] <kwallace2> I think the Pico servo amp at $125 with an FPGA card could be considered inexpensive:
http://pico-systems.com/osc2.5/catalog/product_info.php?products_id=26
[12:26:34] <ktchk> IchGuckLive: the 100v 5a stepper controller is also 100us
[12:27:29] <IchGuckLive> up to you to spend this money
[12:27:40] <IchGuckLive> on 50:1 you need only 8Nm
[12:28:10] <kwallace2> You get to use HALscope for tuning too.
[12:28:28] <ktchk> IchGuckLive: I have stepper motor but like to try servo
[12:28:30] <IchGuckLive> ktchk: leadshine Nema34 is 45USD in HK
[12:28:32] <archivist> jp_mill, as far as I can see and accidental unscrew is fatal and that nut is for endfloat adjustment, I would be avoiding that end
[12:29:40] <ktchk> IchGuckLive: did you check
http://www.taobao.com for chinese price?
[12:32:22] <ktchk> IchGuckLive:
http://item.taobao.com/item.htm?spm=a230r.1.14.299.6lE7pI&id=21670771285 is leadshin chinese Yen price
[12:32:22] <IchGuckLive> 320yuan
[12:32:35] <jp_mill> archivist: Yes my options suck
[12:32:40] <ktchk> IchGuckLive: 220 yen
[12:33:06] <IchGuckLive> your servo and 50:1 gear mounted is 580yen
[12:33:50] <ktchk> IchGuckLive: right but would like to test servo setup
[12:34:35] <IchGuckLive> servo step dir mode or real
[12:35:19] <ktchk> real the motor have an encoder 1000 pulse per rev
[12:36:15] <IchGuckLive> NP
[12:36:24] <IchGuckLive> this gives you a nice setup
[12:36:35] <IchGuckLive> with good error handeling
[12:36:49] <ktchk> what is NP?
[12:38:32] <ktchk> IchGuckLive: ???NP
[12:38:33] <IchGuckLive> No problem
[12:38:40] <ktchk> ah
[12:38:55] <ktchk> but more money
[12:39:17] <IchGuckLive> more power
[12:39:23] <IchGuckLive> so good spend
[12:39:32] <IchGuckLive> moe speed about 3000/min
[12:39:41] <ktchk> yes
[12:39:50] <IchGuckLive> insted of maybe 250
[12:40:16] <IchGuckLive> also cable langth no factor
[12:40:20] <IchGuckLive> up to 6m
[12:41:11] <ktchk> IchGuckLive: what about xenomai ubuntu 12.04lts?
[12:41:39] <IchGuckLive> http://s.taobao.com/search?initiative_id=staobaoz_20131004&jc=1&source=haiwaigou&q=omron+r7m&stats_click=search_radio_all%3A1
[12:42:01] <IchGuckLive> i use the A10030 r7m with xtrive 01E
[12:42:46] <IchGuckLive> in special aplications for stand alone no extra needed it got 6 inputs for a G-code movement that is preprogrammed
[12:42:53] <ktchk> IchGuckLive: you read chinese ?
[12:43:10] <IchGuckLive> as good as i can
[12:43:32] <ktchk> IchGuckLive: pay chinese taobao
[12:44:49] <IchGuckLive> if you start start with those they are like hell for a small mashine
[12:44:50] <ktchk> IchGuckLive: want a hand?
[12:45:22] <IchGuckLive> no im only stuck at german coustom with all your goods
[12:46:09] <IchGuckLive> Chongqing market B.)
[12:46:15] <IchGuckLive> O.O
[12:46:39] <IchGuckLive> 2500 ladies below 25age in a shift
[12:46:47] <jdh> vs. stopping on the way home and picking it up?
[12:48:15] <ktchk> IchGuckLive: I ship repair part to germany for repair siemans
[12:49:00] <ktchk> I want to build this
http://diydrones.com/profiles/blog/list?tag=CNC
[12:49:06] <IchGuckLive> im the SIEMENS man repair to Chongqing
[12:49:15] <IchGuckLive> Haas Milling
[12:49:50] <ktchk> IchGuckLive: Hell scanner to china
[12:51:26] <IchGuckLive> nice work
[12:51:30] <ktchk> IchGuckLive: Hell K303 Helio-klishograph
[12:52:02] <ktchk> IchGuckLive: contact off line ok?
[12:52:09] <IchGuckLive> but not milling AL parts on this
[12:52:34] <ktchk> copper cylinder
[12:54:22] <ktchk> IchGuckLive: Siemens is going to cut a lot of job, is it?
[13:06:29] <archivist> jp_mill, anyway, your threaded item needs a split so it can grip the thread
[14:00:41] <JT-Shop> well I didn't know the nod bolts needed 50 lbs ft of torque on the BP
[14:01:42] <mrsun_> jthornton, well i guess this will be almost the same or something, it will be crossed under the table so it will pull in the same direction on both sides :P
[14:01:54] <mrsun_> cant find any pictures on drafting table wire/pulley systems
[14:03:41] <mrsun_> $10 in supplies compared to 300$+ for another ballscrew and stuff, and i get some time in the lathe (already made the pulleys just some studs left) and it should be almost as good if built correctly in the end =)
[14:05:18] <JT-Shop> like this
http://cockrum.net/cnc_mechanical.html
[14:05:18] <JT-Shop> ?
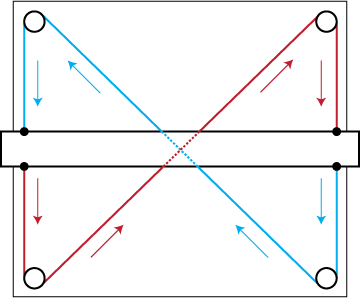
[15:04:20] <andypugh> mrsun_: A different one...
http://corexy.com/theory.html
[15:05:00] <mrsun_> http://corexy.com/principles2.png like that one im building
[15:05:10] <mrsun_> to help drag the non drive side with the drive side =)
[15:08:21] <mrsun_> got a eureka feeling when i got home from the walk .. that i didnt need a second screw just something that will pull in the same speed and lenght as the side driving and voila the idea was born :P
[15:08:39] <mrsun_> yeah people have thought of it before but im just reinventing the wheel :P
[15:11:16] <mrsun_> heh that second link was nice .. .so i realy do not need to drive the cables? but if the cables slip then ?
[15:14:44] <mrsun_> but doing it like i will do it works better with my design of the table i think and it wont be able to slip ... ever =)
[15:14:56] <mrsun_> if the wires dont come lose that is :P
[15:48:57] <asdfasd> I tried that a long time ago, with thin flexible steel rope
[15:49:36] <asdfasd> unfortunately the steel rope was very elastic
[15:51:00] <asdfasd> then I made it with chain, still a little bit elastic but it work
[15:51:43] <Einar> I question the stiffness of that method. Would it not be creating a CNC guitar?
[15:52:10] <asdfasd> it is
[15:54:11] <asdfasd> tried to stretch the wire with more than 100kg force, and still elastic
[15:55:55] <asdfasd> there is a pen plotter made this way, but not suitable for router
[16:08:34] <mrsun_> steel rope .. is that wire ? cause wire shouldnt flex ? :)
[16:13:10] <mrsun_> but i guess it will stretch to some extent ... oh well, will give it a try and hope for the best =)
[16:17:15] <DJ9DJ> gn8
[16:23:37] <andypugh> No matter how much preload you apply, adding the same extra force will give the same extension. That's just Hooke's law.
[16:30:13] <DaViruz> maybe you could use aramid wire or something
[16:31:29] <andypugh> That is even less stiff.
[16:31:42] <DaViruz> oh?
[16:32:15] <DaViruz> maybe it's only the stiffness to weight ratio that is impressive then
[16:33:04] <andypugh> 70-112GPA for Aramid against 200 for steel.
[16:34:05] <DaViruz> seems like it
[16:34:12] <andypugh> Osmium wire would be good.
[16:34:20] <DaViruz> carbon nanotubes!
[16:34:35] <DaViruz> i wonder how ordinary carbon tow would hold up
[16:36:50] <DaViruz> tungsten carbide!
[16:36:53] <andypugh> Right, the mill is now working, so I will bid you goodnight.
[16:37:02] <DaViruz> i dare you to make a flexible wire
[16:37:47] <asdfasd> http://ecx.images-amazon.com/images/I/31eaX5M4UyL._SL500_AA300_.jpg
[16:38:00] <asdfasd> I use 6mm chain like this one
[16:38:26] <asdfasd> it is 10 times less elastic than steel rope
[16:39:07] <asdfasd> the problem with rope is that the wires are twisted, more twisted, more flexible, and more spring effect
[16:40:57] <mrsun_> anyhow i think it will help my problem with the gantry flexing on movement in the end =)
[16:41:22] <mrsun_> else i guess it will be chain if that is alot more stiffer =)
[16:41:32] <mrsun_> i will try my first plan first :P
[16:42:30] <asdfasd> depends, on wooden machine (if I can call it machine) you may not notice any difference :)
[16:43:24] <mrsun_> this one is built of pure steel ... and some small alu details :P
[16:43:56] <mrsun_> but as it stands now on even movement without cutting the gantry flexes like crazy in the oposite end from the drive :P
[17:06:04] <JT-Shop> sounds like a poor design
[17:10:07] <mrsun_> well its my first machine.. its bound to have some problems :P
[17:10:22] <mrsun_> so yes, poor design but wont rebuild the whole machine for it if i can find a good solution to the problems =)
[17:10:25] <mrsun_> now its nighty time
[17:10:54] <JT-Shop> ahh a learning machine
[17:37:34] <Tom_itx> JT-Shop, any updates for us? annodizing, new cannons, etc?
[17:38:03] <Tom_itx> log splitter...
[17:39:13] <Tom_itx> spyder parts...
{kind=link}
{kind=link}
{kind=link}
{kind=link}