Back
[00:06:22] <Valen> occasionally hdds will do in depth checks
[00:06:27] <Valen> perhaps that bugged something
[00:08:07] <jdh> I started synaptic and it did it again
[00:08:41] <Valen> you have dual cores and isocpus set yes?
[00:09:11] <jdh> dual cores, dunno about isocpus
[01:37:07] <Loetmichel> mornin'
[02:03:31] <DJ9DJ> moin
[03:11:06] <mrsun> hmm question is .. how the heck do i bolt something to 2mm thick walls and get it stirdy :/
[03:11:29] <mrsun> i wish i has a friction drill, tho that miight warps stuff due to heat also :(
[03:13:11] <mrsun> T slotted alu would be neat but ... expensive like gold carrying dirt
[03:16:13] <mrsun> i COULD put an iron on the inside of the tubing weld it at the ends only, then drill the holes and thread the holes
[03:16:17] <mrsun> like one big freakin nut :P
[03:16:35] <mrsun> then i could get the thickness for optimal thread strenght also
[03:16:55] <mrsun> hmm
[03:21:35] <Valen> lots of bolts
[03:21:50] <archivist> or rivets
[03:21:54] <mrsun> with just 2mm thickness i would need alot of bolts yes =)
[03:22:14] <mrsun> as the bolts is M8 to be able to torque them to spec i need thread depth of 8mm =)
[03:22:20] <mrsun> i guess
[03:22:53] <mrsun> in the end the profiles will have cost me about the same as buying T slotted alu :P
[09:49:02] <skunkworks> archivist: isn't this you?
https://www.youtube.com/watch?v=zmXxdARxz6U
[09:55:34] <MattyMatt_> is the zotac d525mw a good choice of mobo? looks like no gotchas to me. it has pci and parport
[09:56:20] <MattyMatt_> nice price too
http://www.mavit.co.uk/intel-intel-desktop-board-d525mw-innovation-series---innovation-series---motherboard---mini-itx---in-112512-p.asp
[09:57:14] <MattyMatt_> is zotac an intel brand? some of these reviews suggest it is
[09:59:31] <r00t4rd3d> Another box I made:
http://imgur.com/a/JRAaN
[10:01:32] <TekniQue> I need to find a big sprocket for a small cogged belt
[10:02:03] <MattyMatt_> TekniQue, what belt pitch?
[10:02:03] <TekniQue> or other handy means to gear down a stepper like 40:1
[10:02:26] <TekniQue> I haven't even checked
[10:02:37] <MattyMatt_> you can buy steppers with a 35:1 planetary for €30
[10:02:38] <TekniQue> it's a motor and belt out of a big scanner
[10:03:07] <TekniQue> the application is to control a ball valve
[10:03:16] <TekniQue> to precisely control the flow of water
[10:03:44] <MattyMatt_> if you know the belt pitch/toothform you can buy large pulleys easily
[10:03:51] <TekniQue> a 1" valve
[10:04:35] <MattyMatt_> 40:1 is a big pully tho
[10:04:50] <MattyMatt_> almost certainly cheaper to mill one in plywood
[10:05:04] <MattyMatt_> or a sheet of plastic, if you want it waterproof
[10:06:14] <MattyMatt_> how long is the belt? that's likely to stop you using a giant pulley
[10:06:25] <TekniQue> I probably don't need that big of ratio
[10:06:37] <TekniQue> 15:1 or so may be sufficient
[10:07:11] <TekniQue> belt is around 900mm actually
[10:07:17] <TekniQue> but I will cut it to length
[10:07:25] <TekniQue> since I only need to make a quarter of a rotation
[10:07:46] <MattyMatt_> I made a nice one by drilling a circle of holes, then cutting out a slightly larger circle around them
[10:08:01] <TekniQue> good idea
[10:08:25] <TekniQue> much easier than milling the profile of the teeth
[10:08:58] <MattyMatt_> http://imgur.com/a/DNWJq#1
[10:09:23] <MattyMatt_> then I glued on thin plywood circles as rims
[10:10:03] <MattyMatt_> that's 9:1
[10:10:14] <TekniQue> mhmm
[10:10:15] <MattyMatt_> or 1:9
[10:10:28] <TekniQue> I am making a dyno to test my snowmobile on
[10:10:36] <TekniQue> got my hands on a waterbrake
[10:10:51] <TekniQue> just need to make the electronics to control it
[10:15:35] <MattyMatt_> http://pastebin.com/mzBb4kek there's the gcode. you can extract o200
[10:16:08] <MattyMatt_> the rest is all the hub details
[10:16:41] <TekniQue> cool
[10:24:14] <MattyMatt_> this reminds me, gotta mill a worm+gear before the belt snaps. 9tpi nfi where I'd ever get another
[10:25:21] <MattyMatt_> 0 results found for microline 92A
[10:27:32] <MattyMatt_> 1/4 turn means you could use a pot as an encoder in a giant hobby servo
[10:28:26] <MattyMatt_> dunno if that would be any safer than risking lost steps tho
[10:30:10] <TekniQue> absolute step position doesn't matter one bit
[10:30:16] <TekniQue> it's closed loop control
[10:31:19] <TekniQue> I just need to be able to quickly and precisely adjust the flow
[10:31:49] <TekniQue> of course for control stability, losing steps can be bad
[10:32:24] <TekniQue> the dyno computer measures the rotational speed and has a target speed to hold
[10:33:02] <MattyMatt_> get a nice smooth ball valve. no reclaimed old stopcocks :)
[10:33:04] <TekniQue> and uses an integrator to get the speed right
[10:34:24] <MattyMatt_> nice
[10:34:38] <TekniQue> so I put the engine at full throttle and tell the dyno to get 6000rpm, it will adjust the load until the engine is stable at 6000rpm
[10:35:21] <TekniQue> and once the engine speed is under control, I execute a test program
[10:35:39] <TekniQue> that adjusts the speed target either in steps or as a ramp
[10:35:54] <TekniQue> and records data until max speed is reached
[10:35:59] <MattyMatt_> is there any feedback of what that load is?
[10:36:04] <TekniQue> yes
[10:36:15] <TekniQue> a load cell measures the torque
[10:36:32] <MattyMatt_> neat
[10:36:46] <TekniQue> brake is mounted on a trunnion
[10:36:57] <TekniQue> so the brake housing rotates freely
[10:36:58] <MattyMatt_> I need a desktop version of this for graphing reclaimed steppers
[10:37:25] <TekniQue> it's not hard to implement using a hydraulic pump
[10:37:39] <TekniQue> and a needle valve or ball valve to adjust the load
[10:38:54] <TekniQue> the hydraulic pump also gives you load down to zero rpm
[10:39:24] <TekniQue> my big water brake is only effective above 2000rpm or so
[10:39:52] <TekniQue> but tolerates over a megawatt of mechanical power put into it
[10:39:59] <TekniQue> and over 10000rpm
[10:40:19] <TekniQue> it's a mechanical water kettle
[10:40:35] <TekniQue> cold water is pumped in, hot water returns out
[10:42:04] <MattyMatt_> can you use it top dyno your 150hp lathe too? :)
[10:42:38] * MattyMatt_ guesses you are canadian if you care so much about a snowmobile
[10:42:44] <MattyMatt_> www.youtube.com/watch?v=P4qB6n1cm04
[10:44:37] <TekniQue> my lathe is only 18kW
[10:44:44] <TekniQue> I'm icelandic
[10:45:00] <TekniQue> oh, haha, saw that video the other day
[10:45:43] <TekniQue> and I have other engines that need testing
[10:46:15] <TekniQue> one of the guys I know holds a world record in snowmobile drag racing
[10:48:46] <MattyMatt_> on a serious note. that rig would be handy if you wanted a ptrol powered spindle with fine speed control
[10:49:35] <MattyMatt_> but with a 18kW lathe you've probably got enough spindle torque for all uses :)
[10:50:32] <TekniQue> yeah it doesn't slow down under any of the loads I have put on it
[10:52:04] <TekniQue> I'm hoping to get 220hp out of my snowmobile
[10:53:50] * MattyMatt_ envisions friction drilling straight down through the ice
[10:54:14] <Jymmm> http://www.youtube.com/watch?v=IOhHeyoZLaY&NR=1&feature=endscreen
[10:55:41] <TekniQue> MattyMatt_: you're not wrong
[10:59:19] <TekniQue> Jymmm: heh
[10:59:26] <TekniQue> a true example
[11:01:51] <Jymmm> TekniQue: Yeah, Good overall video actually, even with the fubar. And ITS WHY YOU USE A REAL EMERGENCY STOP!
[11:04:04] <TekniQue> yeah my lathe has a bar along the entire length of it that you can step on to stop it
[11:04:32] <TekniQue> the brake recently started to be intermittent though
[11:04:51] <TekniQue> sometimes it brakes, sometimes it takes a while to stop
[11:05:06] <Jymmm> TekniQue: Cool, IT's just that is the last thing ppl will consider when building
[11:17:11] <Jymmm> Got Lathe?
http://www.youtube.com/watch?v=uO400jMr7VE&feature=endscreen&NR=1
[11:19:24] <MattyMatt_> that's not a lathe, it's a mill with a big 4th axis
[11:20:35] <Jymmm> lathe
[11:21:39] <TekniQue> nice machine
[11:36:15] <L84Supper> hate to be around that room when a log breaks free
[11:39:33] <L84Supper> http://www.youtube.com/watch?feature=fvwp&NR=1&v=P4qB6n1cm04 did you see this as an option at the end of that video?
[11:40:27] <L84Supper> front wheel drive car used for some wood spinning
[12:01:59] <IchGuckLive> hi all
[13:34:37] <andypugh> Oooh! This is nice!
http://www.ebay.co.uk/itm/330841201670?ssPageName=STRK:MEWAX:IT&_trksid=p398
[13:34:53] <andypugh> 80Nm direct-drive servo.
[13:41:25] <andypugh> Just the word "Christmas" from 12 popular songs. Name the songs:
http://xmas.rarelyevil.com/
[13:51:27] <archivist> skunkworks, yes dats mee
[13:53:03] <archivist> hmm is that some bugger ripping my video off
[13:54:15] <andypugh> Vietnamese?
[13:54:46] <Aero-Tec> I have made B axis the Z axis
[13:54:53] <Aero-Tec> and it works great
[13:55:07] <Aero-Tec> G64 is fast and smooth
[13:56:08] <Aero-Tec> but I also made the Z a ANGULAR and turned on WRAPPED_ROTARY = 1
[13:56:22] <Aero-Tec> but it does not wrap at all
[13:56:24] <JT-Shop> Yea!
[13:56:27] <andypugh> Wierd, it _is_ another blinking Vietnamese.
[13:56:34] <archivist> seems I am getting popular or well copied
http://www.google.co.uk/search?q=cutting+a+29+tooth+helical+emc2&hl=en-GB&biw=&bih=&gbv=2&gs_l=heirloom-hp.3...5944.16439.0.16932.32.30.0.2.2.0.412.2850.27j1j1j0j1.30.0...0.0...1c.1.Lr2Hme-Kzx4&oq=cutting+a+29+tooth+helical+emc2
[13:57:07] <JT-Shop> wow
[13:57:59] <archivist> is it time to start issuing take downs
[13:58:02] <Aero-Tec> am I doing some thing wrong for the Z not to be working with the new config I made?
[13:58:11] <skunkworks> youtube is turning to crap. You can't search by date anymore either
[13:58:14] <Aero-Tec> is Z a linear axis no matter what?
[13:58:18] <gene77> Afternoon Guys
[13:58:37] <JT-Shop> youtube is full of crap
[13:59:27] <Aero-Tec> JT-Shop: can you help at all?
[13:59:35] <andypugh> Aero-Tec: Nothing is anything no matter what :-)
[13:59:56] <gene77> And from that link, hundreds of ripoffs. I wonder how many have gotten a job showing off someone else work?
[14:00:05] <Aero-Tec> well then why is Z not acting like it should?
[14:00:26] <andypugh> archivist: Click the flag, fill out the form, they video will be removed in a day or so. In my experience anyway.
[14:01:09] <Aero-Tec> hope they also credit you will all the clicks the copies got
[14:01:21] <Aero-Tec> it you getting money for the adds
[14:01:35] <andypugh> Aero-Tec: In what way does the Z axis not work?
[14:01:54] <Aero-Tec> it will not wrap
[14:01:59] <Aero-Tec> WRAPPED_ROTARY = 1
[14:02:03] <Aero-Tec> does nothing
[14:02:13] <archivist> andypugh, just done that
[14:02:22] <andypugh> I am pretty sure you can't _wrap_ Z.
[14:02:35] <Aero-Tec> why not?
[14:02:42] <Aero-Tec> it should be able to
[14:02:46] <andypugh> Historical reasons.
[14:02:54] <Aero-Tec> what others can not be wraped?
[14:03:13] <Aero-Tec> x and y?
[14:03:20] <andypugh> I am guessing here. You would need to look at the code.
[14:03:43] <andypugh> But I suspect that XYZ UVW ignore WRAPPED_ROTARY
[14:04:11] <andypugh> That doesn't mean you can't calibrate them in degrees and connect them to rotary actuators.
[14:04:52] <andypugh> Out of interest, is the jog speed of your rotary-Z controlled by the mm/min or the degree/min jog slider?
[14:04:55] <Aero-Tec> so then smooth G64 moves are impossible using G91 and G64
[14:05:19] <Aero-Tec> do not know
[14:05:23] <Aero-Tec> will have to test
[14:05:41] <Aero-Tec> I had it all Zeroed as no jogging needed
[14:06:34] <Aero-Tec> guess one will have to write new code to make things work like it is wrapped
[14:06:46] <andypugh> My Z is looking a lot better now that I recompiled without Chris M's little Axis DRO goof.
[14:06:49] <Aero-Tec> can be done but I have to get this work done and out
[14:07:21] <Aero-Tec> would be in version 2.5?
[14:07:27] <Aero-Tec> 2.51
[14:07:36] <andypugh> No, only in Master.
[14:08:02] <Aero-Tec> good thing I stopped at 2.5
[14:08:19] <JT-Shop> Aero-Tec: I don't have any experiance with a rotary axis except reading the manuals and working with sims
[14:08:31] <andypugh> It was fixed weeks ago, I just happened to pull down a copy while the bug was there.
[14:09:01] <Aero-Tec> thanks
[14:09:30] <andypugh> But .999 looks a lot better than .9746...
[14:09:32] <Aero-Tec> well after what feels like wasting tons of time it looks like I am back to where I started
[14:09:55] <Aero-Tec> got about 30 hours of spring making time in front of me
[14:10:11] <andypugh> Do you get smooth movement with rotary Z?
[14:10:18] <Aero-Tec> yes
[14:10:26] <Aero-Tec> but it has to unwind
[14:10:30] <andypugh> Why do you need wrapped-rotary?
[14:10:32] <JT-Shop> Aero-Tec: are you making closed end springs?
[14:10:39] <Aero-Tec> will not stop at 0
[14:10:49] <Aero-Tec> yes
[14:11:11] <Aero-Tec> and it takes time to unwind the axis
[14:11:31] <Aero-Tec> wrapped will go to the closest 0
[14:11:58] <andypugh> Aero-Tec: End your cycle with G10 L20 Z0 ?
[14:12:16] <Aero-Tec> what does that do?
[14:12:28] <andypugh> That just resets the current Z position to 0.
[14:12:47] <andypugh> (ie, coordinate becomes zero with no movement)
[14:12:54] <JT-Shop> http://linuxcnc.org/docs/html/gcode/gcode.html#_g10_l20_set_coordinate_system_a_id_sec_g10_l20_a
[14:13:03] <andypugh> I missed out the "P"
[14:13:52] <Aero-Tec> thing is it does not stop at 0, it stops some other place and need to go to 0
[14:14:06] <Aero-Tec> the wrap works so well for that
[14:14:22] <andypugh> Every cycle is the same though?
[14:14:39] <andypugh> So, G0 to the nearest full turn to reset the tool, then G10.
[14:14:43] <Aero-Tec> what I need is a working G64 for X,B or a working wrapped for Z
[14:15:32] <Aero-Tec> will have to redo the code and run some math for that to work
[14:15:35] <JT-Shop> Aero-Tec: have you seen the Hal only spool winder?
[14:15:45] <andypugh> Well, yes, but that isn't going to happen before the customer demands the springs.
[14:15:49] <Aero-Tec> no
[14:15:58] <JT-Shop> let me find it
[14:16:17] <Aero-Tec> how do I find out about the hal only spool winder?
[14:16:30] <JT-Shop> I'm looking for the link
[14:17:48] <JT-Shop> http://linuxcnc.org/index.php/english/forum/48-gladevcp/23317-run-gladevcp-from-halrun?limitstart=0
[14:20:50] <Aero-Tec> cool
[14:21:23] <Aero-Tec> I will have to looks at it later as I have to get this done
[14:21:42] <Aero-Tec> I know the time is not wasted, I have learned so much
[14:21:51] <Aero-Tec> thanks for the help
[15:05:17] <abetusk> does anyone have any experience with double helical (herringbone) gears? Do they reduce backlash?
[15:05:48] <andypugh> That isn't what they are for.
[15:06:08] <andypugh> But if you push them sideways relative to each other, then it can.
[15:07:01] <archivist> they have no side force
[15:07:19] <archivist> and smooth running
[15:07:44] <mrsun> hmm i wonder if a diamond cutting disk for angle grinder can in any way grind steel
[15:08:12] <archivist> tell us after your experiments
[15:08:23] <abetusk> andypugh, I thought the idea was that both of the angles pushed equally, so the net total was zero side force
[15:08:24] <mrsun> :P
[15:08:36] <abetusk> ...?
[15:08:38] <mrsun> cutting cast iron its fabilous at =)
[15:08:50] <andypugh> Yes, that is exactly what they are for.
[15:09:12] <abetusk> ah, I see
[15:09:23] <andypugh> If you bias them sideways then it will take out the backlash. I am not sure that is a _good_ idea.
[15:10:05] <andypugh> In old books I have seen triple and quad helical gears. I don't know what they were thinking.
[15:10:05] <archivist> I can imagine them getting a bit lumpy if you do that
[15:10:12] <abetusk> Is there a way to add another set of rails at a different angle to 'push' it to the center to try and put some pressure there?
[15:10:50] <abetusk> maybe I should back up. Is there a way to create a gear system that reduces to the maximum extent backlash?
[15:11:03] <abetusk> *to the maximum extent that it can
[15:11:10] <archivist> there are gearing systems designed for 0 backlash use them instead
[15:11:11] <andypugh> http://www.hpcgears.com/products/anti-backlash_gears.htm
[15:11:47] <abetusk> those gears have the same number of teeth on each of the discs, just offset from one another?
[15:12:08] <andypugh> They are biased in opposite directions by a spring.
[15:12:20] <abetusk> ah, interesting
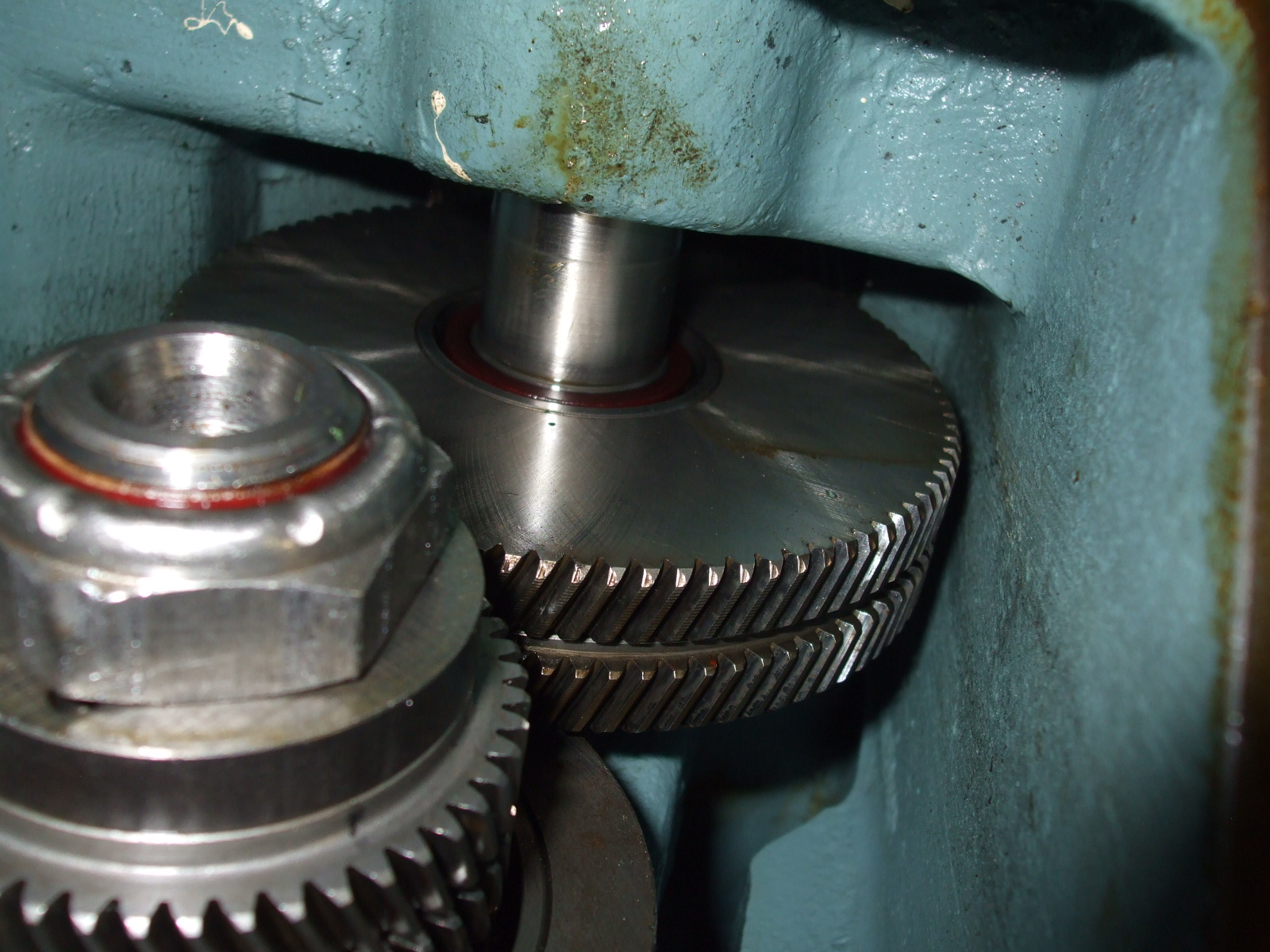
[15:12:27] <skunkworks> http://electronicsam.com/images/KandT/conversion/zaxis/gears1.JPG
[15:12:39] <skunkworks> http://electronicsam.com/images/KandT/conversion/zaxis/gears.JPG
[15:13:24] <skunkworks> adding shim between small gears - reduces backlash
[15:14:04] <andypugh> The system skunkworks is describing is more rigid.
[15:14:46] <andypugh> Note that they are helical in the same direction. If you shim a normal double helical apart all that happens is that you introduce a very small phase shift.
[15:14:51] <archivist> and there is another system I am trying to remember the name of, high reduction ratios
[15:15:02] <andypugh> Harmonic?
[15:15:12] <archivist> yup
[15:15:21] <abetusk> are there any systems without springs in them (besides ballscrew) that can be used to reduce backlash?
[15:15:34] <abetusk> ah, yes, I just saw the harmonic gear
[15:15:41] <abetusk> but what if you had a rack and pinion setup
[15:16:06] <andypugh> Push the gears deeper in to mesh than normal...
[15:16:57] <andypugh> It's not great for noise, smoothness or life, but your gantry won't be doing 3000rpm 24/7 either.
[15:17:01] <abetusk> also:
http://lcamtuf.coredump.cx/cycloid/
[15:17:56] <andypugh> I invented the cycloidal gear system about 5 years ago. Unfortunately not for the first time.
[15:18:01] <andypugh> :-)
[15:18:12] <abetusk> they look really amazin
[15:22:10] <archivist> I made an epycyclic gear box inside the barrel
http://www.collection.archivist.info/archive/DJCPD/PD/2008/2008_07_15_p1010006_Webb_Clock/p1010006.jpg
[15:22:52] <andypugh> Self-winding clock?
[15:23:23] <archivist> weight driven but electrically rewound
[15:23:45] <archivist> so it keeps running during the wind
[15:23:47] <andypugh> Delightfully crazy combination.
[15:24:06] <archivist> what the customer wanted
[15:24:38] <archivist> crazy customer jobs can be fun
[15:24:45] <andypugh> Wind?
[15:25:06] <archivist> that had a Graham escapement as well
[15:25:30] <archivist> wind as in wind up
[15:25:30] <andypugh> Ah, "wind" not "wind" :-)
[15:25:54] <andypugh> (Stupid language)
[15:26:02] <archivist> some people are easier to wind up than a clock!
[15:36:05] <andypugh> I wonder if a set of plastic gears from Maplin would drive my spindle resolver happily enough?
[15:36:31] <archivist> for how long
[15:36:57] <andypugh> The load should be tiny.
[15:37:34] <archivist> the load is all dynamic probably
[15:38:44] <gene77> where does one normally apply a friction compensation bias in a pid control?
[15:39:39] <gene77> I just tried to map mine, and am getting an almost exponential rising toward vertical curev
[15:39:53] <gene77> I just tried to map mine, and am getting an almost exponential rising toward vertical curve
[15:40:22] <andypugh> gene77: The whole point of PID is that it can compensate for all that sort of thing.
[15:42:00] <gene77> Unforch, a nice clean balance at 1 rps, and at 10 rps, is crappy enough to trip the fuse circuit at 5 rps, error is way high
[15:43:59] <abetusk> couldn't you do some type of staggered gear, where one gear is normal and the other is an epicycle gear, to reduce backlash?
[15:44:12] <abetusk> ah, no, sorry
[15:44:43] <gene77> I am adjusting the pwmgen offset to get 1 rps when the request is 1, and pid.0.FF0 for near zero error when the encoder scale gets me 10 rps with an input of 10 rps
[15:46:31] <gene77> That is why I was trying to map the i/o, request vs actual, which of course tops out at something a hair over 20 rps, 1200 revs
[15:47:52] <gene77> By the time motion is requesting 10.0xxx, its tapped out at 1200+ revs!
[15:51:55] <PCW_> Do you have some integral term so the error is close to 0 at a constant speed?
[15:51:57] <PCW_> that and ramping the commanded velocity out to keep the error under control
[15:52:18] <PCW_> s/out/ought/
[15:53:52] <PCW_> (that is slewing the commanded velocity slowly enough that the integral term can follow)
[15:54:01] <gene77> I just found that I can set FF0 39 and encoder scale 39 and get about 9.7 rps for a 10.01667 request, thats good but its audible hunting about 3x a sec
[15:54:55] <PCW_> if you have some integral term, the average error should be 0
[15:54:58] <gene77> Yes, I have a limit20.0maxv of 10 in series with the request and pid.0.command
[15:55:13] <gene77> Yes, I have a limit2.0.0maxv of 10 in series with the request and pid.0.command
[15:56:29] <PCW_> thats 600 RPM/sec. can you spindle track that?
[15:56:37] <PCW_> your
[15:57:26] <gene77> Sure, but its 600 rpms/min. The spindle in that gear is tapped at 1200 & small change
[15:58:20] <PCW_> a limit of 10 is a 600 RPM/second acceleration
[15:58:33] <PCW_> (10 RPS/S)
[15:58:55] <gene77> motion-spindle-out-rps is the source, and that is about right, it can go from 60 to 600 in about .8 secs
[15:59:36] <PCW_> It tough to tune 1 or 2 quadrant motor drives because of the asymmetry
[16:00:41] <PCW_> my guess is that you can accelerate a lot faster than you can decelerate
[16:01:57] <gene77> I am feeding pid.command to one mult2 input, and pid.error thru a slowdown limit to theother input of a mult2, and comp from the output. I have the trip point set to shut off with a pony brake slowing it about 10% at 600
[16:03:06] <PCW_> Thats your fuse saver?
[16:03:07] <gene77> but I can't start from 0 to 300, the error is so high at 300 that I'd have to set comp high enough to burn trhe place down
[16:03:51] <PCW_> but the error should be close to 0 if you have some integral term
[16:05:30] <gene77> Igain? I'll try again, but it didn't help the end of the ramp before, but hang on
[16:06:33] <PCW_> and you will need to ramp the command slowly enough that I can track the ramp
[16:09:45] <gene77> By hand?
[16:11:56] <PCW_> no, by limit maxv
[16:12:53] <PCW_> It will depend on how much I term you can get away with
[16:12:57] <gene77> ahh
[16:13:38] <PCW_> the point is not to outrun the I terms ability to correct the speed error
[16:14:06] <gene77> Good Igain, now at .5
[16:15:33] <PCW_> with some Igain the static velocity error should tend to 0
[16:15:35] <PCW_> with more I gain the correction will be faster though at some point it will become unstable
[16:15:36] <gene77> I did have maxv at 10, but 8, while slower is more stable at the catch point
[16:21:08] <gene77> This is letting me run the Pgain up too.
[16:21:39] <gene77> But at 25 its beginning to hunt at about 2 hertz
[16:22:01] <gene77> not bad, just enough to hear the slack in things
[16:26:29] <gene77> Dgain makes the hunt worse
[16:28:12] <PCW_> D gain usually does not make send for a first order plant like a motor velocity control
[16:28:31] <PCW_> s/send/sense/
[16:29:24] <DJ9DJ> gn8
[16:30:32] <gene77> Thats seems to agree with here. Igain .5, Pgain 20, FF0 same as encoder slots is at least in the playing field.
[16:31:08] <PCW_> second order like torque -->position yes on D term , first order like torque --. velocity , no
[16:32:42] <gene77> Some FF1 then?
[16:34:43] <PCW_> FF1might help tracking on rampup/down but since the drive is going to respond asymmetrically. not sure if it will really help a lot
[16:36:15] <gene77> and vey much makes it hunt worse
[16:37:33] <PCW_> FF1 should only have an effect during rampup/rampdown but it may well excite a oscillation
[16:38:11] <gene77> it seems to.
[16:38:25] <PCW_> (since it will apply a step output during commanded velocity ramp up and ramp down)
[16:49:48] <gene77> Thanks, I believe I have it better than it was. Someone gave me a link to a sparkfun current sensor, and that will be the fuse in due time. About a week maybe.
[16:56:31] <andypugh> I wonder how horrible an idea it is to just clamp my encoder pulley between the drawbar and the end of the spindle?
[16:57:06] <andypugh> It doesn't _seem_ right, but would probably work just fine.
[17:00:44] <gene77> as long as its well centered, mine is off perhaps a thou and I can see it in the velocity output!
[17:01:17] <gene77> Its clamped beteen the 2 nuts that set spindle bear in preload in this toy
[17:01:27] <gene77> Its clamped beteen the 2 nuts that set spindle bearing preload in this toy
[17:10:22] <andypugh> This would be an actual pulley, with a belt drive to a resolver.
[17:11:49] <andypugh> Maybe I will try to screw it on to the tiny bit of thread that is visible.
[19:17:53] <andypugh> Does anyone know how to install the eeti "eGalacyTouch" drivers? I tried to help, but I killed his Ubuntu install...
[19:19:58] <tjb1-mobile> PCW_: Got a minute?
[19:20:44] <PCW_> yeah just about that
[19:21:30] <tjb1-mobile> What is the FOUT in the thcad calibration formula? It says the output frequency
[19:22:30] <PCW_> Yes frequency out (note that you must use the binary scaler to lower it into a range you can count with software)
[19:22:59] <tjb1-mobile> So the fout is the 1-128?
[19:24:02] <PCW_> fout will be the calibration values on the label /128 if you divide by 128
[19:25:25] <tjb1-mobile> Back, sorry. Just not sure what goes in place of that in the formula
[19:26:30] <PCW_> you use the formula in the manual but scale the calibration values by the binary division ration first
[19:26:38] <PCW_> ratio
[19:28:06] <PCW_> so if you are using 1/128 you divide the calibration numbers by 128 before plugging them in the formula
[19:28:40] <tjb1-mobile> Then fout would just be the frequency I want to find the voltage of
[19:29:05] <PCW_> yes so you need to re-arrange to read in volts
[19:30:23] <PCW_> I think JTs comp does this. not sure though
[19:32:30] <tjb1-mobile> Alright, thanks.
[19:34:20] <PCW_> Yeah the scale and offset are THC parameters
[19:39:29] <PCW_> I guess you would use 1 for encoder scale (so velocity reads in Hz)
[19:40:37] <PCW_> bbl ttgh
[22:53:02] <tjb1-mobile> My off topic question of the night...anyone have the Galaxy S3? I know r00t4rd3d uses android
[23:11:59] <r00t4rd3d> i got a s2 and nexus 7
{kind=link}
{kind=link}
{kind=link}