Back
[03:01:32] <V0idExp> Hi all! :) Yesterday night I was that guy who annoyed you with noobish questions about PID and FF settings :)
[03:02:03] <V0idExp> That's it, today, charged with a desire to make this stuff work, I need your help again. :)
[03:02:24] <V0idExp> THe only thing that we have figured out, is the encoder scale
[03:02:34] <V0idExp> And probably, that FF1 must be set to 1
[03:03:06] <Valen> in a pid loop ff is the last thing to play with
[03:03:12] <V0idExp> can somebody explain a brief procedure to find the correct PID / FF values?
[03:03:56] <V0idExp> What happens, is if I set MINFERROR and FERROR to very high values (like 100 mm), it goes for a while (now I'm testing only one axis)
[03:04:07] <Valen> if your scale and direction are about right
[03:04:17] <Valen> start increasing P until it oscilated
[03:04:20] <Valen> oscilates
[03:04:33] <Valen> then reduce P by about 75%
[03:04:33] <V0idExp> oscilates? without any inputs?
[03:04:45] <Valen> jog it and it'll make a hell of a racket
[03:05:00] <Valen> "you will know when it happens"
[03:05:31] <Valen> then when jogging at various speeds add FF1 (i think) to zero out the position error
[03:06:01] <Valen> ie with just P the ferror will have a set offset as you move along
[03:06:16] <Valen> add some ff to counteract that so your ferror sits around zero
[03:06:42] <Valen> then add in I in big bunches to take out the last of any offsets
[03:06:54] <Valen> season with a pinch of D to take out overshoot
[03:07:07] <Valen> look at FF2 to help with acceleration
[03:07:37] <Valen> put it this way, with 20A fuses on our motors we blow them in about a second when we hit an oscilation
[03:07:39] <V0idExp> didn't catch the part about FF1 and jogging... so, I start with increasing P... then the axis will slightly oscillate fwd/bwd, right?
[03:07:43] <Valen> no
[03:07:46] <Valen> add p
[03:07:53] <Valen> jog around look at ferror
[03:08:08] <Valen> eventually when you have too much p it will over correct
[03:08:11] <V0idExp> while keeping ferror high?
[03:08:14] <Valen> yes
[03:08:17] <V0idExp> got it
[03:08:19] <V0idExp> then?
[03:08:22] <Valen> leave that stuff really high until you have it working
[03:08:32] <Valen> do all the other stuff i said
[03:08:33] <V0idExp> understand :)
[03:08:56] <Valen> be carefull with I
[03:09:11] <V0idExp> should it be kept on 0?
[03:09:13] <V0idExp> as well as D?
[03:09:14] <Valen> turn it off before making changes
[03:09:23] <Valen> to start with set everything to zero
[03:09:32] <V0idExp> even FF?
[03:09:43] <Valen> is it part of everything?
[03:09:47] <Valen> (thats a yes btw)
[03:10:21] <Valen> what type of system do you have? a servo system?
[03:11:53] <V0idExp> well, it is a 5 axes stepper driven system. but only 2 axes are used for positioning, others are just tools etc.. Everything is driven by Mesa 7i43 board. I'm interested in closing the loop on XY axes (stepper driven), by adding linear encoders. So, as for now, I'm experimenting only with the X axis, keeping Y open (stepper only)
[03:12:33] <Valen> well then your outside my experience then lol, what I was saying is how you tune a servo PID loop
[03:13:02] <Valen> I presume it would work the same way though
[03:13:09] <V0idExp> well, I suppose that the PID loop is of the same importance
[03:14:09] <V0idExp> for example, yesterday we arrived to a point, when moving by some millimeters the X axis (the loop-closed one), it did some corrections, and simply MOVED it.
[03:14:19] <V0idExp> but at very low speeds, cause on higher speeds we got following errors.. PID and FF were casual :)
[03:14:46] <V0idExp> so, I need a procedure to tune these settings... starting from yours it's at least some point to start from.. :)
[03:15:10] <Valen> theres some official name for that system, but i modified it with the FF part ;->
[03:16:33] <V0idExp> more than that, not only it moved, it also MOVED IT PRECISELY! I mean, the scope of adding linear encoders is to improve precision on XY axes... and jogging forward-backward by 0.1, 1, 5mm and measuring positions with a probe scanner, resulted in a very high precision... the point now is to obtain higher speeds
[03:16:44] <V0idExp> and possibly, avoid following errors :D
[03:16:58] <Valen> if your getting following errors its not being very precise
[03:17:08] <Valen> well assuming your ferror is set sensibly
[03:18:04] <Valen> also your acceleration settings are within reason for your machine
[03:18:10] <Valen> and power supply etc
[03:19:15] <V0idExp> well, being PID, FF and following errors pure casual, I HOPE that tuning those will solve the problem... the point is that moving in open-loop mode did a good job in terms of speed, the problem is that it was not that precise... the power supply is good enough, drivers are configured well (although, maybe with a too high ustepping rate, if it matters)
[03:19:47] <Valen> probably helps with smoothness for your current operation mode
[03:20:05] <Valen> do keep in mind you can change this stuff without restarting axis each time
[03:20:54] <V0idExp> yep, found it yesterday (calibration in axis? :D) til that restarted it for 6 months :D
[03:21:32] <Valen> would be nice to be able to set acceleration and such in there too :-<
[03:22:35] <V0idExp> there are acceleration input boxes.... at least in 2.5.1
[03:23:41] <V0idExp> what's the name of this procedure? can I find more docs on the net?
[03:34:15] <Valen> cant rember, but thats the procedure I use to start with
[03:34:25] <Valen> takes about 5 minutes to get pretty close
[03:34:48] <Valen> you can fiddle about adding P and D if you want it to be "harder" but its harder on the machine too
[03:37:37] <V0idExp> now we have a situation, where (with very high ferrors) it seems that speeds are real ones (paragonable to those we had with open-loop)... it seems also that it also positions correctly... but compensation times (speeds?) are too low...
[03:38:29] <Valen> "compensation time" meaning move to the set point?
[03:38:46] <Valen> are you in front of the mill now?
[03:39:10] <V0idExp> I mean, if you tell it "g01 x100 f3000" it travels at 3000mm/min to ~x100... then for a while (in terms of some SECONDS) it does compensation... and finally goes to the CORRECT point.
[03:39:31] <Valen> yeah you said you were using ff1 to do all the work
[03:39:43] <Valen> its the tail wagging the dog
[03:39:49] <Valen> ff1 is a "little tweak"
[03:39:59] <Valen> not the prime mover
[03:40:15] <V0idExp> so, tuning ff1 will reduce "seeking" times?
[03:40:36] <Valen> what you have basically done is gone back into open loop mode
[03:40:40] <Valen> are you in front of the mill now?
[03:40:47] <V0idExp> o_O?
[03:41:00] <Valen> ff1 comes from outside the pid loop
[03:41:28] <Valen> its intended to be used as a correction to help the pid loop anticipate what's coming basically
[03:41:42] <V0idExp> yep, while I'm talking with you, some guys are trying your suggestions :)
[03:41:43] <Valen> the "slow correction" your seeing is actually the pid loop doing its job
[03:41:55] <Valen> so start over on that axis
[03:41:57] <Valen> make everything 0
[03:42:11] <Valen> then start increasing P until you get an oscilation
[03:42:18] <Valen> whilst jogging back and forth
[03:42:23] <V0idExp> everything? FF's? or also PID?
[03:42:27] <Valen> EVERYTHING!
[03:42:40] <Valen> ff1 ff2 ff0 P I D all = 0
[03:43:23] <Valen> then when you jog with a P of say 1, nothing will happen
[03:43:32] <Valen> so make it 2, and see if anything happens
[03:43:35] <Valen> make it 4
[03:43:40] <Valen> then 8 or whatever
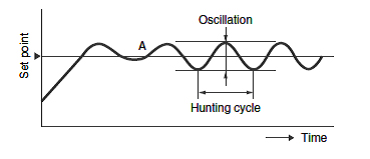
[03:43:43] <V0idExp> the concept of oscillation is still something obscure to us :D
[03:43:57] <Valen> it'll sound like the worlds biggest vibrator
[03:44:12] <Valen> it accelerates toward the set point, then overshoots and accelerates back
[03:44:25] <V0idExp> HAHAHAAH :d
[03:44:37] <Valen> if you look at the trace of ferror in halscope you will see it oscilating
[03:44:54] <Valen> http://www.mstarlabs.com/docs/graphics/pid_fi11.gif
[03:44:56] <Valen> oscilation
[03:45:11] <V0idExp> ok :)
[03:45:15] <Valen> http://www.ia.omron.com/support/faq/answer/include/faq00667/img/FAQ00667-1.jpg
[03:45:53] <Valen> also set your deadband to around a count or 3 for your scales
[03:46:23] <Valen> or it'll oscillate over a count for no particular reason
[03:46:51] <V0idExp> now is set to 4... it moves... but seems that does not oscillate
[03:47:21] <Valen> so make it bigger
[03:47:36] <Valen> if the ferror isn't too bad your probably getting close
[03:47:55] <Valen> some machines have a P of 70 or more, it depends on the machine, the controller and a bunch of other stuff
[03:49:44] <Valen> P is what does most of the work, its output is "Proportional" to the error, it multiplies the ferror by P and feeds that to the output
[03:50:00] <Valen> so the bigger P the harder it tries to correct the ferror
[03:54:14] <V0idExp> Sorry, connection lost
[03:54:30] <V0idExp> here I am... so, found that P near 20 started to treble...
[03:54:45] <V0idExp> now, I must divide it by 4, right? 75%
[03:54:50] <Valen> i told you you would know it
[03:55:03] <Valen> so P sounds like 15 is a good place to start
[03:55:13] <Valen> it should be moving pretty well now though
[03:56:03] <V0idExp> the next step is tuning FF1?
[03:56:10] <Valen> yes
[03:56:21] <Valen> so its jogging around smoothly with a P of 15?
[03:56:29] <Valen> it should have a pretty constant ferror
[03:56:52] <V0idExp> seems that it trebles slightly on P=15
[03:57:30] <Valen> what is your deadband set to?
[03:57:33] <V0idExp> notice, that we have deadband=3 and P=15, everything else is 0
[03:57:58] <V0idExp> deadband=3
[03:58:19] <Valen> 3 sounds like alot for deadband? is that in counts (of your scale) on in distance?
[03:59:35] <V0idExp> i dunno.. :D
[03:59:35] <Valen> I think its in scale units? I think ours is .002 with .001 scales
[03:59:46] <V0idExp> yep, initially it was something like .00x
[03:59:54] <Valen> yeah put it back to that
[04:00:14] <V0idExp> now the guy is reading that formula in manual
[04:00:19] <V0idExp> to figure out the right value
[04:00:29] <Valen> eh its a whole bunch of maths
[04:00:49] <Valen> if your deadband was that high it could have been bouncing over that
[04:01:07] <Valen> but you want P high enough to have good movement, but not so high it oscilates
[04:03:21] <V0idExp> we'll try now with deadband = 1/200
[04:04:14] <V0idExp> 1/200 * 3
[04:04:39] <Valen> (19:52:12) Valen: gtg get the missus
[04:04:39] <Valen> (19:52:13) Valen: good luck
[04:04:55] <V0idExp> thank you a lot!
[04:17:40] <Valen00> Any luck?
[04:18:13] <Tom_itx> V0idExp has quit IRC (Quit: Page closed)
[04:20:57] <Valen00> Guess that's a no then
[04:21:53] <Valen00> Went to all the trouble installing irc on my phone for naught
[04:24:30] <MattyMatt> add speech to text and you can now irc wjile you wirc
[04:25:51] <MattyMatt> rename siri to cradek and you don't even need a connection >:)
[07:15:29] <DJ9DJ> tach
[07:52:47] * jdh appreciates
[10:04:18] <jthornton> why would you reply to a thread that is almost 3 years old?
[10:04:51] <jdh> flashbacks from that acid 20 years ago kicking in?
[10:05:04] <ScribbleJ> Time traveler.
[10:05:10] <jdh> s/20/30/ maybe
[10:21:08] * jthornton feels like a nap is looming in the near future
[10:21:42] <jthornton> I must be a psycho
[10:30:51] <skunkworks> logger[psha],
[10:30:52] <logger[psha]> skunkworks: Log stored at
http://psha.org.ru/irc/%23linuxcnc/2012-10-23.html
[10:38:50] <kirk_wallace1> I often find replies to old threads from searches useful. It can take time for the best answers to be found.
[11:41:06] <tjb1> r00t4rd3d: That knob is huge
[12:08:14] <IchGuckLive> hi all B9
[12:08:20] <IchGuckLive> O.O
[12:23:35] <pcw_home> dont B#, dont B♭, just B♮
[12:37:47] <IchGuckLive> ich schaffe das einfach nicht das 3D fenster im NUM 1,3,7 modus zu verschieben irgendwie ist mir die mouse funktion abhanden gekommen das zoom geht noch
[12:38:03] <IchGuckLive> Sorry wrong chat room
[12:40:47] * tjb1 goes to google translate
[12:41:11] <tjb1> Thats dirty IchGuckLive, shouldnt be in those kind of chat rooms
[12:42:43] <IchGuckLive> tjb1: got it
[12:42:57] <IchGuckLive> tjb1: im on a new free CAD system with Blender
[12:54:12] <r00t4rd3d> tjb1, keep your eyes off my knob.
[12:54:15] <tjb1> IchGuckLive: Thats a dirty chat room you are in
[12:54:21] <tjb1> r00t4rd3d: Its huge…way to big for that
[12:54:29] <r00t4rd3d> i get that alot
[12:54:52] <tjb1> alot?
[12:55:18] <tjb1> http://imabeautygeek.com/wp-content/uploads/2010/04/ALOT_Allie-Brosh.jpg
[12:57:09] <r00t4rd3d> Adverb
[12:57:09] <r00t4rd3d> alot (not comparable)
[12:57:09] <r00t4rd3d> Nonstandard spelling of a lot.
[12:58:04] <r00t4rd3d> http://imgur.com/a/LEa4T
[12:58:06] <r00t4rd3d> :D
[12:58:21] <r00t4rd3d> it looks big in the pictures but sitting here it looks fine
[12:58:25] <jdh> that's a big knob
[12:59:05] <tjb1> the knob is half the box
[12:59:24] <r00t4rd3d> I sold it for 75 bucks
[12:59:31] <r00t4rd3d> knob on that
[12:59:50] <tjb1> clearly to a woman with inferior design tastes
[13:00:09] <skunkworks> why can't I find a pdf of this? a50l-1-0230
[13:00:11] <r00t4rd3d> she loves it
[13:00:19] <skunkworks> my google foo has failed me
[13:00:31] <jthornton> what is it?
[13:00:36] <skunkworks> igbt
[13:00:40] <skunkworks> module
[13:00:59] <jdh> typo?
[13:01:43] <jdh> pricey
[13:03:40] <c60_> IchGuckLive: Which cad plugin for blender? I've tried one but it only works with blender <2.49
[13:04:51] <r00t4rd3d> http://i.imgur.com/oQJvF.jpg
[13:05:13] <IchGuckLive> i do a new in 2.64a
[13:05:52] <IchGuckLive> this makes you 3D G-code along X or A axis with rotation tables
[13:06:14] <IchGuckLive> c60_: with given parasmeters for tepover
[13:07:30] <c60> IchGuckLive: got a link?
[13:08:45] <c60> i use this one --->
http://wiki.linuxcnc.org/cgi-bin/wiki.pl?GcodeGenerator
[13:09:09] <c60> but it's outdated. works though
[13:11:42] <IchGuckLive> i will check
[13:15:40] <IchGuckLive> c60: there are no rotation axis
[13:17:24] <c60> IchGuckLive: I'm just doing standard 2.5D engraving with a router setup,
[13:18:16] <c60> IchGuckLive: but you can always just do a search and replace for one of the Axis, substitue A for Y,
[13:18:55] <c60> IchGuckLive: I've done that before when using a rotary axis with a mill, had to replicate some railing spindles.
[13:19:59] <IchGuckLive> i got a good cad cam for that but it is better to get some free stuff on this as well thru a blender python
[13:22:53] <c60> which blender cad plugin do you use? or is it included in addons?
[13:26:45] <IchGuckLive> no i start from scratch
[13:56:33] <OWhite> Hello people - I used axis and pyvcp. Has anyone heard of a method to perform a home outside of using Axis? I'd like to be able to control it from pyvcp.
[14:21:27] <JT-Shop> halui
[14:28:33] <andypugh> Confidence-inspring name
[14:36:04] <L84Supper> andypugh, it's a good name for a product reviewer
[14:36:19] <Jymmm> used car salesman
[15:40:09] <JT-Shop> hmmm
[16:09:32] <DJ9DJ> gn8
[16:10:21] <awallin> gneight?
[16:22:47] <alex_joni> awallin: gute n-acht
[16:30:21] <tjb1> JT-Shop
[16:38:43] <JT-Shop> aye
[16:40:36] <tjb1> Im stupid and I need explanation of what is happening in the comp file :/
[16:41:55] <andypugh> Are you so stupid that JT would be wasting his time explaining :-)
[16:43:26] <JT-Shop> lol
[16:44:08] <tjb1> Not at this time I dont believe
[16:44:10] <JT-Shop> what part don't you understand?
[16:44:22] <JT-Shop> what parts do you understand?
[16:44:52] <tjb1> What part of it tells the axis to move?
[16:44:58] <tjb1> and tell it how much to move?
[16:50:45] <JT-Shop> which part do you think does that?
[16:51:23] <andypugh> Let me give him a clue. Line 120.
[16:52:46] <JT-Shop> I don't even know which comp we are talking about
[16:52:57] <andypugh> I am assuming thc.comp
[16:53:03] <tjb1> if(torch_up){
[16:53:04] <tjb1> offset += correction_vel;
[16:55:25] <andypugh> Offset is the offset from the commanded Z. It increases and decreases every time the comp is called
[16:55:56] <andypugh> The important thing to realise about a comp is that it runs 1000 times a second, every second.
[17:04:13] <tjb1> I dont see where it is actually telling it to change the Z height
[17:05:54] <tjb1> No pin connections
[17:06:12] <andypugh> In that case, it won't work
[17:06:28] <tjb1> Well I see pin out float z_pos_out
[17:06:37] <andypugh> thc.comp has to sit between the z-position command pin and the stepgen or PID
[17:07:51] <JT-Shop> and lie about the position
[17:07:51] <andypugh> joint.2.motor-position-cmd -> thc.z_pos_in -> thc.z_pos_out -> stepgen.2.position-cmd
[17:08:32] <andypugh> (actually, it does that badly. It really ought to read the feedback position and subtract the offset)
[17:08:53] <JT-Shop> what's done badly?
[17:09:35] <andypugh> z_pos_out = z_pos_in + offset;
[17:09:35] <andypugh> z_fb_out = z_pos_in; // keep axis motor position fb from being confused
[17:10:06] <andypugh> Really it ought to be z_fb_out = z_fb_in - offset
[17:10:55] <andypugh> (Which is how the offset comp does it)
[17:11:28] <tjb1> Well mine is going to be different from JTs since im not using the Mesa cards
[17:12:03] <tjb1> I have 2 inputs, torch up and down and I need the comp to go up or down when activated with an M code but ignore the inputs if velocity drops a certain amount
[17:12:12] <andypugh> It shouldn't matter, the thc comp looks like it ought to be hardware-agnostic
[17:12:40] * JT-Shop wonders why tjb1 is not looking at the thcud.comp instead
[17:12:49] <tjb1> Thats what I am looking at
[17:13:08] <JT-Shop> that is not what we are looking at then :)
[17:13:29] <tjb1> What are you looking at?
[17:13:34] <andypugh> thc.comp
[17:13:35] <JT-Shop> thc.comp
[17:14:02] <andypugh> Which is part of LinuxCNC, whereas I don't see thcud in the source.
[17:14:09] <tjb1> thcud is Jts
[17:14:11] <tjb1> JTs
[17:14:14] <JT-Shop> I knew assuming we were all on the same page was a mistake
[17:14:39] <JT-Shop> andypugh:
http://gnipsel.com/shop/plasma/files/EMC-Plasma.scpost
[17:14:51] <JT-Shop> opps wrong link
[17:15:07] <JT-Shop> http://gnipsel.com/shop/plasma/files/thcud.zip
[17:15:21] <JT-Shop> off by one link :)
[17:17:25] <tjb1> Im guessing a lot of this is visual
[17:17:36] <tjb1> Like the pin out bit vel_status "When the THC thinks we are at requested speed";
[17:18:00] <andypugh> I point out that is equally naughty about how it lies about positiomn.
[17:19:04] <andypugh> I wonder if I could put a little plasma table on my mill?
[17:19:27] <andypugh> Would have to be dry, too much slosh otherwise I suspect.
[17:19:58] <tjb1> I dont see cur_offset anywhere
[17:20:19] <andypugh> Unless I used some sort of insane pantograph.
[17:24:44] <tjb1> andy want to help me write this? :D
[17:27:47] <andypugh> What's to write? Why won't thcud just work as-is?
[17:30:03] <tjb1> thcud really just requires a signal for up and a signal for down and it will work?
[17:30:11] <JT-Shop> I think I reached my posting limit
[17:30:38] <tjb1> What is required for thcud to work and I will tell you what I dont have ;)
[17:31:55] <andypugh> You need a plasma cutter
[17:32:02] <andypugh> You need a computer
[17:32:08] <andypugh> You need LinuxCNC
[17:32:40] <tjb1> :/
[17:32:42] <andypugh> JT-Shop: ?
[17:33:48] <andypugh> tjb1: Have you installed thcud?
[17:33:52] <tjb1> No
[17:34:07] <andypugh> That would help. Then man thcud would show you the manpage
[17:34:22] <tjb1> Not at home and I didnt blieve it would work because I thought JT was using the voltage inside it, not using the MESA to decide
[17:34:38] <andypugh> Or you could read the first section of the comp, which explains how it works and even lists typical parport connections.
[17:46:00] <tjb1> JT-Shop: Does thcud run all the time the torch is on?
[17:49:03] <tjb1> andypugh: Is there a way to make it so I can activate/deactivate that with an M code?
[17:49:25] <JT-Shop> what do you mean run all the time the torch is on?
[17:49:43] <tjb1> Does it compensate the whole time the torch is on?
[17:50:01] <JT-Shop> I'm guessing you have not read the comp
[17:50:10] <andypugh> pin in bit enable ?
[17:51:07] <andypugh> Just read the first 75 lines of thcud.comp It's not that much to read, and all your questions so far have been abswered there.
[17:51:09] <tjb1> I see if(torch_on && arc_ok && vel_status)
[17:51:45] <andypugh> Why read the C-code when there is so much plain english?
[17:53:19] <tjb1> I must be blind
[17:53:57] <tjb1> pin in bit enable "Enable the THC, if not enabled Z position is passed through";
[18:20:18] <skunkworks> http://www.machsupport.com/comparison.php
[18:26:50] <andypugh> I can't say I quite understand the business model here. Why call it "4" when it's worse?
[18:42:50] <JT-Shop> skunkworks: did you like the shop gantry thread on hsm
[18:43:42] <JT-Shop> andypugh: I'll pull master in the AM and see how much I can add for the 7i77
[18:44:15] <andypugh> I just didn't want to list the pins without checking.
[18:48:35] <JT-Shop> wow 138 pins and parameters
[18:55:25] <JT-Shop> andypugh: I think you ment zoom in not boom in?
[18:56:07] <andypugh> I suspect so.
[18:56:09] <andypugh> Where?
[18:56:22] <JT-Shop> the run from line post
[18:56:35] <andypugh> Ah ok
[18:56:49] <andypugh> I will claim it as local patois :-)
[18:56:59] <JT-Shop> lol
[19:02:28] <PCW> later 7I77 firmware has more...
[19:02:53] <JT-Shop> aww mine is old
[19:03:11] <PCW> yeah they get that way
[19:03:23] <andypugh> JT-Shop: Which mode?
[19:03:41] <JT-Shop> oh I didn't look
[19:03:45] <andypugh> Tonight's experiment:
[19:03:46] <andypugh> 5 bit OUT FALSE hm2_8i20.0003.status.bus-underv
[19:04:24] <andypugh> Instead of hm2_5i25.0.8i20.0.1.status.bus-underv
[19:04:54] <PCW> thats nice
[19:05:02] <andypugh> I actually wonder if three digits of serial number is enough?
[19:05:19] <JT-Shop> I forget how to specify the mode
[19:05:21] <andypugh> FALSE hm2_7i76.0000.spinena
[19:05:31] <andypugh> I have the first 7i76 it seems :-)
[19:05:38] <PCW> serail 0?
[19:06:01] <PCW> sserial serial 0
[19:06:21] <andypugh> 0A000000 I think
[19:06:43] <PCW> A is fixed for 7I76
[19:07:17] <JT-Shop> my 7i77 is 0x12000002
[19:07:42] <PCW> so thats pretty darned old as well
[19:07:51] <andypugh> I guessed so. If you had sold 167 mllion 7i76s I think you would be retired :-)
[19:09:32] <PCW> 3 hex digits is probably safe but 4s not too much nuisance
[19:10:16] <PCW> I like the SN names but it will seriously mess with pncconf
[19:13:00] <PCW> They are especially nice when you have multiples of one card type but a nuisance if you have just one (why do you care about a SN if you have one 7I76)
[19:14:09] <JT-Shop> oh crap I broke the posting record
[19:15:09] <PCW> maybe an option to drop SNs if there's only one card of a type (no idea if thats practical)
[19:16:28] <andypugh> Not without going back to the first one if you find a second one.
[19:17:04] <PCW> Yeah had a idea it might be awkward
[19:17:33] <andypugh> JT-Shop: How do you mean "record"?
[19:17:44] <andypugh> One-day record?
[19:17:59] <andypugh> Otherwise you break the record every time you post.
[19:18:04] <JT-Shop> well it was 3999 then I made another post so now it is 4000 for me
[19:18:08] <JT-Shop> LOL
[19:18:14] <JT-Shop> yea just being funny
[19:18:29] <JT-Shop> I feel like being silly sometimes
[19:19:16] <andypugh> I am always completely serious. It comes of being a dour Yorkshireman.
[19:19:27] <JT-Shop> so I didn't see the mode being in the config string
[19:19:46] <JT-Shop> I'm usually serious being of English decent
[19:20:13] <JT-Shop> but the Irish part that gave me red hair makes me silly from time to time
[19:20:52] <JT-Shop> so is my 7i77 not a good example to get the pinout from?
[19:23:12] <JT-Shop> I looked that up by the way
[19:24:46] <PCW> its OK it just does not have the MPG encoder inputs
[19:25:23] <JT-Shop> do I need to send mine back to get updated?
[19:26:13] <PCW> We can, but eventually it should be do-able in Linux
[19:26:26] <JT-Shop> ok, I'll wait
[19:27:15] * JT-Shop thinks it is time to wander inside
[19:27:58] <PCW> the MPG is more valuable on the 7I76 (since it has no spare encoders)
[19:40:21] <andypugh> JT-Shop: It's my current project. serial-number naming was just a bonus.
[20:30:28] <Jymmm> http://sfbay.craigslist.org/sby/tls/3344094016.html
[20:58:47] <jdh> offer him $300
[22:56:34] <FinboySlick> http://www.youtube.com/watch?v=QxysfTM95t4 You guys seen that one yet? What a beautiful little thing.
[22:57:50] <tjb1> http://elmira.craigslist.org/tls/3327892297.html
[23:17:43] <Jymmm> http://www.huffingtonpost.com/2012/10/19/donna-radio-caller-deer-crossing-sign-complaint_n_1987405.html
[23:19:33] <Jymmm> Darwin Award Candidate ^^^^^^^^^^
[23:21:30] <r00t4rd3d> working with oak wood sucks
{kind=link}
{kind=link}
{kind=link}
{kind=link}