Back
[00:00:29] <pfred1> djdelorie this is facing
http://img26.imageshack.us/img26/1415/anvilspark.jpg
[00:00:45] <djdelorie> I like the idea of linuxcnc having scriptable "tools" in the gcode bin, so you can call up a "mill hole" tool, type in a few numbers, hole gets milled.
[00:01:12] <pfred1> djdelorie have you found the picture to gcode thing yet?
[00:01:18] <djdelorie> yeah, realizing that, I then knew why the code always started beyond the edge
[00:01:46] <djdelorie> haven't looked.
[00:01:55] <pfred1> there is a page on linuxcnc of them all let me try to find it
[00:02:30] <djdelorie> http://linuxcnc.org/docs/html/gui_image-to-gcode.html ?
[00:02:43] <pfred1> yes but there is a master page of all the scripts
[00:03:01] <djdelorie> http://wiki.linuxcnc.org/cgi-bin/wiki.pl?action=browse&id=Simple_LinuxCNC_G-Code_Generators&revision=1 ?
[00:03:21] <pfred1> looks like the place
[00:03:35] <djdelorie> that's where I got the facing script
[00:03:55] <pfred1> I think chris is responsible for most of those
[00:03:59] <pfred1> if not all of them
[00:05:07] <djdelorie> not the facing one at least
[00:06:12] <pfred1> now that I'm looking seems like Lawerance Glaister is the culprit
[00:07:54] <Thetawaves> djdelorie> I like the idea of linuxcnc having scriptable "tools" in the gcode bin, so you can call up a "mill hole" tool, type in a few numbers, hole gets milled.
[00:08:04] <Thetawaves> i have been thinking about this a lot
[00:08:16] <Thetawaves> i've heard a couple people day dream about that
[00:08:40] <djdelorie> consider the milling operations in heekscad, for example. Now imagine those right in linuxcnc
[00:09:20] <djdelorie> in woodworking, I need operations like "using a 1/4in router bit, make a recessed hole 0.72in diam and 0.28in deep"
[00:09:20] <pfred1> I wish I had a hole miller for when I made my router clamp
[00:09:39] <pfred1> what a nightmare it was to drill
[00:09:45] <Thetawaves> djdelorie, ssi was wishing for a similar interface for turning
[00:10:35] <djdelorie> for that, you'd need a way to cut out a circle, rather than completely carve it out. With wood, you'd pre-mark where to put screws, do a first pass around the outside, and move out of the way so the user can screw down the flailing piece
[00:11:01] <pfred1> I drilled this hole in phenolic with an adjustable spade bit?
http://i.imgur.com/dHlY6.jpg
[00:11:30] <djdelorie> up to now, I've been printing the drawing on paper, gluing it to the wood, and cutting it by hand on a scroll saw
[00:11:40] <pfred1> yup
[00:11:50] <djdelorie> most of the cnc machine parts were made that way
[00:12:47] <pfred1> well my machine is a departure from other designs
[00:12:57] <Thetawaves> why not leave sections connected in the cutout
[00:13:07] <Thetawaves> so you only have to saw a tiny piece by hand
[00:13:37] <Thetawaves> i've been doing that pretty successfully
[00:13:37] <djdelorie> yup, could do that too, assuming there's a convenient place to put such a cutout, and the inside of the cut doesn't need to be precise
[00:14:25] <Thetawaves> ahh yeah
[00:14:37] <pfred1> this is my Z axis sort of
http://i.imgur.com/huyEV.jpg
[00:16:25] <pfred1> LinuxCNC in motion
http://www.youtube.com/watch?v=fHPKaHLzXes
[00:17:06] <pfred1> I was in stepconf and just kept jacking up my speed
[00:18:34] <pfred1> all of that is inside this
http://i.imgur.com/PHZCW.jpg
[00:22:48] <pfred1> the melamine dream machine aka thriftbot
[00:25:49] <pfred1> I got the idea for my Z axis looking at a commercial machine that had nested square tubes
[00:28:03] <pfred1> this is an early sketch of the rest of my machine plan but all of it but the most basic layout has changed
http://i.imgur.com/lysGP.jpg
[00:30:29] <pfred1> it is a little hard to visualize but I'm going for something more like this today
http://i.imgur.com/8Y11S.jpg
[00:33:50] <djdelorie> skate bearings?
[00:34:00] <pfred1> but of course
[00:34:11] <djdelorie> I've seen other designs that use those
[00:34:17] <djdelorie> clever idea
[00:34:26] <pfred1> yeah that is where i got the idea from the skate bearings on the 45
[00:34:37] <pfred1> cept they put them so close together
[00:34:51] <djdelorie> the ones I saw, though, the bearings captured the rail, rather than the rails capturing the whole carriage
[00:34:57] <pfred1> mine have a bit more mechanical advantage
[00:35:35] <Jymmm> wth is the brown shit?
[00:35:46] <pfred1> Jymmm the other axis
[00:35:59] <Jymmm> what view is that?
[00:36:00] <djdelorie> hence the "hard to visualize" bit...
[00:36:01] <pfred1> well it is actually the old way I was going to do it
[00:36:29] <pfred1> but that just got too complicated
[00:37:13] <Jymmm> I never considered this config...
http://www.brusselsprout.org/cnc/Y-bearings.jpg
[00:37:25] <pfred1> when I hit upon the other idea I never fully drew it out
[00:37:26] <Jymmm> bad for the bearings too
[00:38:04] <pfred1> problem with round rails is you need pretty big rails for them to not flex unless they're supported
[00:38:09] <Jymmm> Wait... If they are JUST for alignment, then not so bad.
[00:38:20] <djdelorie> Jymmm: I've seen a Y configuration, but with the two bottom bearings angled in so they're on the flats
[00:38:23] <Jymmm> the top bearing is carrying the load
[00:38:37] <Jymmm> djdelorie: Yeah, 120deg
[00:38:56] <pfred1> I seen the guy who casts the bearing holders
[00:39:07] <djdelorie> the tricky part is making the fixture that holds them, it's a weird angle to be bolting to
[00:39:22] <Jymmm> Ok, so actually, that one isn't so bad, then only side load is of the bolt tightening them.
[00:39:57] <djdelorie> might be easier to do four bearings, you just need two perpendicular flat pieces
[00:39:58] <Jymmm> It's just keeping them on the rod.
[00:40:12] <Jymmm> djdelorie: fuck that, three works.
[00:40:25] <pfred1> skate bearings are so cheap
[00:40:32] <Jymmm> djdelorie: 4 would be a royal PITA
[00:40:32] <djdelorie> bearings are a lot cheaper than the time it takes to make the funny fixture
[00:40:36] <pfred1> I saw this one knucklehead he made this huge machine in a room
[00:40:46] <Jymmm> djdelorie: It's adjusting them thats a bitch
[00:40:50] <djdelorie> true
[00:40:57] <pfred1> out of what looked like 3/4" galvanized pipe to me
[00:41:37] <pfred1> his bearing trucks if i had to guess must have had 40 bearings in them a piece
[00:42:03] <Jymmm> djdelorie: But this actually makes sense, only the top bearing is taking all the load, the bottom two are just to keep it on the rail. and the only force on them is the bolt moutning them.
http://www.brusselsprout.org/cnc/Y-bearings.jpg
[00:42:49] <djdelorie> if you could mount two bearings on top, say 90 degrees apart, and one on the bottom just to keep it "there", you might only have to adjust the bottom one anyway
[00:43:10] <djdelorie> easier to make the mounting fixtures too, it's all right angles
[00:43:35] <Jymmm> djdelorie: Yeah, right.... NOT! Believe me, I've tried
[00:43:44] <djdelorie> which part is the NOT part ?
[00:43:56] <Jymmm> It SOUNDs easy, but it gets complicated fast
[00:44:07] <pfred1> Jymmm I know what you mean
[00:44:20] <Jymmm> djdelorie: Start moutning all those "right angle" together
[00:44:22] <djdelorie> isn't that the fun part? ;-)
[00:44:38] <Jymmm> djdelorie: If you're sadistic, sure.
[00:44:50] <pfred1> a 3 legged stool never wobbles
[00:44:54] <djdelorie> masochistic
[00:45:08] <Jymmm> djdelorie: that too
[00:45:36] <djdelorie> had a teacher in high school named Mrs Masek. If you took her class you were a Masekist
[00:47:44] <Jymmm> heh
[00:49:24] <djdelorie> http://www.delorie.com/cnc/Y90.jpg
[00:49:57] <Jymmm> djdelorie: Yes, been there, done that. It's a PITA
[00:50:22] <pfred1> better to just use plain angle iron stock
[00:50:36] <pfred1> evne if it isn't really 90 degrees
[00:50:40] <djdelorie> there is that
[00:50:43] <Jymmm> pfred1: not even that, the pic I linked to is actually a good idea
[00:50:58] <djdelorie> I still think in terms of wood. There's no angle maple stock.
[00:51:08] <pfred1> I saw someone who put together a bunch of angles to make trucks
[00:51:10] <Jymmm> It's simplistic and effective.
[00:51:15] <Jymmm> KISS
[00:51:37] <pfred1> face it there are reasons THK can charge what they do for their linear products
[00:52:01] <Jymmm> Sure, but if you're thinking skate bearings, that doens't apply.
[00:52:21] <pfred1> people use drawer slides
[00:52:49] <Jymmm> If you just need to go left and right, who cares
[00:53:06] <Jymmm> even drawer slides can be tensioned
[00:53:11] <pfred1> well what else do CNC machines do?
[00:53:18] <Jymmm> stuff
[00:53:23] <Jymmm> and more stuff
[00:53:27] <Jymmm> and other stuff
[00:53:32] <Jymmm> Any Questions?
[00:53:35] <Jymmm> Goo!
[00:53:37] <Jymmm> d
[00:54:08] <djdelorie> cnc machines make more cnc machines...
[00:54:15] <pfred1> I wanted to CNC my mill but it has too much backlash
[00:56:03] <Jymmm> OT.... If I put a dimmer on the primary side of a xfmr, and the secondary goes to a bridge. will that fubar the output?
[00:56:21] <pfred1> dimmers can't handle inductive loads
[00:56:22] <Jymmm> unregulated PS
[00:56:35] <Jymmm> pfred1: They can, just not for very long =)
[00:56:38] <pfred1> well most can't
[00:57:20] <Jymmm> ok, then on the secondary before the bridge?
[00:57:26] <Jymmm> no that wont work
[00:57:29] <KimK> Jymmm: You could use a Variac(tm) there. I can't recall the competing names.
[00:57:40] <djdelorie> or autotransormer
[00:57:44] <pfred1> autotransformer is the generic term
[00:57:45] <djdelorie> autotransformer
[00:57:50] <Jymmm> KimK: Yeah, I'm being cheap. $1 for a dimmer
[00:58:02] <pfred1> $1 is a rheostat
[00:58:08] * djdelorie guesses that's $40/hr in dimmers...
[00:58:25] <Jymmm> djdelorie: It lasts longer than that actually =)
[00:58:30] <pfred1> but rheostats that can actually handle power are pricy
[00:58:47] <Jymmm> less than an amp at 120vac
[00:58:56] <pfred1> for a buck yo ucan get maybe one that can handle a Watt
[00:59:14] <Jymmm> they have 15A dimmers
[00:59:18] <Jymmm> for $1
[00:59:30] <pfred1> yeah but they can't deal with inductive loads
[00:59:31] <djdelorie> rheostat and a triac, good for resistive loads
[00:59:39] <Jymmm> they also have fan speed control for $10
[00:59:51] <Jymmm> ceiing fan
[00:59:55] <pfred1> that would handle inductance
[01:00:07] <djdelorie> why not just put a variable switching regulator after the rectifier?
[01:00:13] <pfred1> well ceiling fans are odd motors I think
[01:00:18] <Jymmm> djdelorie: too complicated
[01:00:46] <djdelorie> use a PWM stepper driver to generate the voltage you need?
[01:01:01] <pfred1> they regulate current
[01:01:17] <Jymmm> Eh, I got a couple of these,
http://www.harborfreight.com/router-speed-control-43060.html I'll just plug the xfmr into it
[01:01:23] <KimK> Powerstat(tm) was the second one, crap, what was the third one?
[01:01:51] <Jymmm> pfred1: current control? That might be interesitng
[01:02:00] <djdelorie> pfred1: disable the current regulator, just run it in %on mode. Presto! Switching regulator. Ish.
[01:02:17] <pfred1> a 317 can regulate voltage or current
[01:02:36] <pfred1> though I've never used one in the current mode
[01:02:45] <Jymmm> It's just a variable hot wire controller is all, dnt need anything fancy, just DC, AC has too many harmonics
[01:02:48] <djdelorie> my UV exposure box has a dozen of them in that mode.
[01:03:17] <pfred1> yeah you just put it in circuit in series right?
[01:03:17] <KimK> Ha, here's what one company has to say about Variacs:
http://www.thetransformer.co.in/Variacs.htm (Must be copied from an ancient parchment?)
[01:03:33] <djdelorie> how fast do you have to switch a hot wire? Arduino, thermister, relay...
[01:03:41] <djdelorie> temperature controlled wire!
[01:03:56] <Jymmm> switch?
[01:04:13] <Jymmm> djdelorie: Temp contol is a myth, it's a get it close =)
[01:04:17] <djdelorie> on off on off on off - the temperature can't change *that* fast, can it?
[01:04:17] <pfred1> KimK this is my variac
http://www.instructables.com/id/Bare-Variac-Build/
[01:04:42] <Jymmm> djdelorie: OH YEAH! Hot wire is a funny beast
[01:04:55] <pfred1> KimK after messing with it I'll never look at AC the same again
[01:05:13] <Jymmm> djdelorie: ambient to 1400F in 7 seconds
[01:05:24] <djdelorie> hmmm... despite a transformer being inductive, if the secondary load is resistive, the V/I curve on the primary would still be resistive. A regular dimmer might work
[01:05:53] <djdelorie> so 0.1 second updates should keep it within 30F or so?
[01:06:02] <pfred1> I know people hook dimmers up to inductive loads and they seem to get away with it a lot
[01:06:16] <Jymmm> djdelorie: I made a hot wire once that used 120VAC directly, it LITERALLY sang at 60Hz
[01:06:32] <Jymmm> No more AC for me tyvm =)
[01:06:36] <djdelorie> the problem is, if it's a triac and the PF is too far off, it moves into a different quadrant and the triac could latch up or worse.
[01:06:39] <pfred1> it didn't hum? you must have had the length at a harmonic
[01:06:56] <Jymmm> pfred1: 52"
[01:07:06] <Jymmm> or there abouts
[01:07:24] <KimK> pfred1: Nice job, and great salvage buy, congrats!
[01:07:31] <Jymmm> maybe 40", I don't recall, but the cuts it made were wavy =)
[01:07:33] <pfred1> KimK thanks
[01:07:51] <pfred1> thing looks al ittle like a Dalek in the first picture
[01:08:22] <Jymmm> djdelorie: I wasn't joking about having 180K ft of NiChrome. I was sellign it a ways back =)
[01:09:51] <Jymmm> most of that is in 40ga though
[01:09:52] <pfred1> I salvaged a bunch of heating element wire our of an electric kiln I scrapped
[01:10:39] <Jymmm> Yeah, I have various gauges and OPF, so makes it easier to make hot wire cutters for various materials
[01:10:43] <pfred1> mostly i was interested in the bricks
[01:10:46] <djdelorie> make your own pcb reflow oven...
[01:11:25] <pfred1> I made this
http://i.imgur.com/Ld6E4.jpg
[01:11:41] <djdelorie> a pile of bricks?
[01:11:51] <pfred1> it is a blast furnace to melt aluminum
[01:11:55] <djdelorie> sweet
[01:11:56] <Jymmm> pfred1: You made a SATAN CAT?
[01:12:04] <pfred1> heh my cat is evil
[01:12:09] <djdelorie> relax, it's just blue LEDs :-)
[01:12:15] <Jymmm> hhaha
[01:12:20] <morfic> nice watch cat
[01:12:28] <Jymmm> Yeeeeeeeeeeeeeeeees Master of Evil
[01:12:47] <djdelorie> the left eye starts blinking when the countdown reaches zero...
[01:12:52] <Jymmm> cats are only good for one thing
[01:13:16] <djdelorie> sharpening pencils?
[01:13:20] <Jymmm> dog food
[01:13:29] <pfred1> turning cat food into unusable compost
[01:13:46] <djdelorie> ...and leaving said compost in the hall right outside my office...
[01:13:55] * djdelorie is not a cat person
[01:14:01] <djdelorie> and the cat knows it
[01:14:11] <Jymmm> I love animals, but I'm against ANYTHING that hunts for sport. human, or beast.
[01:14:27] <pfred1> heh my cat is guilty of that pastime
[01:16:25] <Jymmm> Hunt for food all day long, but for sport... I'm more likely to shoot the SOB who does that.
[01:16:55] <pfred1> Jymmm when you live out in the country there's not always a whole lot for most folks to do
[01:17:05] <pfred1> so we shoot stuff!
[01:17:09] <Jymmm> pfred1: they can shoot each other.
[01:17:19] <pfred1> sometimes we do that too
[01:17:38] <Jymmm> try harder!
[01:17:54] <djdelorie> The bunnies canna handle it captain!
[01:18:20] <pfred1> I'm backed up to a hunting preserve here in fact
[01:19:19] <pfred1> at least it used to be the year it opened it was pretty popular it has since fallen off a lot
[01:19:24] <djdelorie> we get all sorts of wild animals right in our yard. Almost hit a pair of moose in the driveway
[01:19:46] <Jymmm> pfred1: Here, try one of these next tim
http://i41.tinypic.com/1z6uno0.jpg
[01:19:48] <pfred1> like this?
http://i.imgur.com/ZsbO6.jpg
[01:19:52] <Jymmm> time
[01:21:00] <djdelorie> http://www.delorie.com/photos/animals/img_0972.html
[01:21:15] <djdelorie> http://www.delorie.com/photos/animals/img_2302.html
[01:21:23] <djdelorie> http://www.delorie.com/photos/animals/20080513-wellbird.html
[01:21:28] <pfred1> Jymmm this is the closest commercial operation to me
http://www.city-data.com/picfilesv/picv9337.php
[01:21:50] <Jymmm> pfred1: where you at?
[01:22:26] <pfred1> Jymmm lower delaware it is where all the pensuylvanians go to get drunked up and shoot at anything that moved
[01:22:33] <Jymmm> ah
[01:22:46] <pfred1> though us locals aren't much better I guess
[01:23:00] <Jymmm> Come on, look at that cuteness...
http://i40.tinypic.com/35jlamp.jpg
[01:23:45] <djdelorie> "you don't taste like chocolate..."
[01:23:52] <pfred1> wasn't it mark zuckerberg that said they're going to kill whatever they eat?
[01:24:42] <Jymmm> Cuteness overload...
http://i42.tinypic.com/35cptee.jpg
[01:24:52] <pfred1> I had ribs for lunch today I mean I'm no vegetarian
[01:25:22] <djdelorie> Cuteness overload...
http://shirt.woot.com/Derby/Entry.aspx?id=45023
[01:25:34] <Jymmm> I'm a carnivor too, but like I said if it's for food, ok. If JSUT for sport, another matter.
[01:25:59] <Jymmm> djdelorie: That's just poofy!
[01:26:12] <pfred1> where's the unicorn?
[01:26:27] <djdelorie> maybe the whale ate it.
[01:26:29] <Jymmm> Poofy == The stuff that girls think are cute and adorable, but guys ar like WTF?!
[01:26:45] <pfred1> the whale does have a guilty look on his face
[01:26:49] <djdelorie> the shirt has the error popup on it though.
[01:27:17] <djdelorie> makes it funny for guys :-)
[01:28:07] <Jymmm> That's not actually a bad idea....
http://www.waldeneffect.org/20120315wireholder.jpg
[01:29:37] <pfred1> most go for the EMT through the ladder setup
[01:30:00] <Jymmm> if you have a ladder handy
[01:30:21] <pfred1> electricians usually have ladders
[01:30:42] <Jymmm> My ladders are the contortion ones
[01:30:49] <Jymmm> 12 and 16 ft
[01:30:50] <pfred1> german ladders?
[01:31:14] <Jymmm> http://www.loftladders1.com/wp-content/uploads/2010/12/folding-ladder.jpg
[01:31:25] <Jymmm> thats a 12ft verison
[01:31:33] <pfred1> yeah german ladder
[01:31:56] <Jymmm> you can make it scaffolding, folding, straight, 'M', etc
[01:32:22] <Jymmm> I have a plank for my 16ft and it hase the holes to mount a router to it too
[01:32:37] <Jymmm> ghetto router table
[01:32:52] <Jymmm> I got it that way
[01:33:28] <pfred1> my ghetto router table
http://i.imgur.com/zJsf6.jpg
[01:33:51] <Jymmm> hey, it works
[01:34:49] <djdelorie> my old router table:
http://www.delorie.com/wood/projects/router/oldtable.jpg (now used as a step stool :)
[01:35:10] <pfred1> djdelorie primitive but effective I like it
[01:35:23] <djdelorie> its replacement was far from primitive, though.
[01:35:38] <pfred1> ever watch the router workshop on TV?
[01:35:44] <djdelorie> no
[01:36:00] <Jymmm> I made this... the slots are where the fence mounts to
http://i49.tinypic.com/30jr2ja.jpg
[01:36:01] <pfred1> all that guy had was a router sticking up out of a hole in a table
[01:36:09] <pfred1> man he did it all
[01:36:37] <pfred1> Jymmm thats all you need
[01:36:47] <Jymmm> =)
[01:37:03] <pfred1> he didn't even have slots he'd clamp his fence on the edge of the table
[01:37:20] <Jymmm> heh
[01:39:14] <Jymmm> fsck it, I thik I'm going to get some 2.5" pvc pipe and make a plunger for a caulk gun and use it as a dispenser for the grease.
[01:39:45] <pfred1> why are you dispensing grease anyways?
[01:39:45] <Jymmm> maybe even all thread and a lil motor
[01:40:09] <Jymmm> pfred1: repacking it
[01:40:18] <Jymmm> repackaging
[01:41:20] <pfred1> oh filling up little tubes?
[01:41:20] <Jymmm> yeah
[01:41:54] <pfred1> you could just empty a caulk tube and fill it with grease if you like caulk guns so much
[01:42:45] <pfred1> grease cartridges are a lot like caulk tubes
[01:42:55] <Jymmm> I need to be able to semi-control the fill. a caulk gun alone maintians pressure when you let go and keeps ooozing out. If I have a little motor, I can back off the pluger a tad between fills
[01:44:36] <pfred1> Jymmm so you're making your own oozy sub machine gun?
[01:44:52] <djdelorie> i.e. you need a makerbot extruder setup
[01:45:02] <Jymmm> I never thought of it that way, but yeah!
[01:45:23] <djdelorie> they suck the goo back in when they want to "stop" extruding
[01:45:35] <Jymmm> djdelorie: I HOPE I get to the point where I'll need PLC's
[01:45:51] <djdelorie> to dispense grease?
[01:46:01] <Jymmm> repacking it
[01:46:06] <pfred1> I do everything with simple chips
[01:46:06] <Jymmm> repackage it
[01:46:21] <Jymmm> ok arduino, same diff.
[01:46:23] <pfred1> like I'd probably do the time stuff with 555 timers
[01:46:30] <djdelorie> a cnc grease repackaging machine. Insert a tray of little jars, it fills them all. Usually.
[01:46:46] <Jymmm> djdelorie: not jars, tubes.
[01:46:53] <djdelorie> whatever
[01:46:56] <pfred1> heh
[01:47:03] <pfred1> yeah like the machine is going to care
[01:47:28] <Jymmm> not exactly, as you have to have a pipe near the bottom of the filled tube
[01:47:32] <djdelorie> maybe what you need is a miniature sausage filling machine
[01:48:02] <djdelorie> or just buy a box of pre-filled little tubes. Why are you doing this again?
[01:48:08] <Jymmm> it it was a continous tube, that would be easy.
[01:48:36] <Jymmm> just a small project is all.
[01:48:45] <djdelorie> ah, "just because" :-)
[01:49:01] <Jymmm> exactly!
[01:49:15] * pfred1 thinks Jymmm is getting into the snake oil sales business
[01:49:30] <djdelorie> my hvac guy has a saying for when I get into that mode.
[01:49:48] <djdelorie> "Tell the hamsters to get off the wheel and give it a rest already!"
[01:50:05] <Jymmm> and if I ever get to the point of repacking 100,000 tubes a day, I'll tell you =)
[01:50:11] <pfred1> lets see how the pros do it
http://www.youtube.com/watch?v=Z219IwVUtj4
[01:50:16] <djdelorie> you won't have time to tell us
[01:51:09] <Jymmm> pfred1: I dont have a spare $400K USD for that =)
[01:51:14] <pfred1> Jymmm this is the gadget you need
[01:51:47] <Jymmm> pfred1: they have a better one than that, same company too.
[01:52:08] <pfred1> yeah I can see loading them tubes getting old fast
[01:52:41] <Jymmm> I need to get to the point of filing a hopper with tubes and letting it have at it!
[01:59:56] <DJ9DJ> moin
[02:02:49] <Jymmm> hola DJ9DJ
[02:03:17] <DJ9DJ> hi Jymmm
[02:03:38] <Jymmm> =)
[02:34:02] <Loetmichel> mornin'
[02:44:47] <Jymmm> Loetmichel: WTH DO YOU WANT?! WHO SENT YOU?! WHY ARE YOU HERE?! YOU WEARING A WIRE?! YOU A COP?!
[02:45:54] <Jymmm> Loetmichel: Sorry, damn autocorrect... Hi there!
[02:46:30] <Loetmichel> Jymmm: hrhr
[02:47:27] <DJ9DJ> huh? ;)
[03:25:21] <Loetmichel> *brrr* *spit* *beeeeeeeeep* steel sheet enclosing made by angle grider is LOUD and dirty. *ptui* ... atl leas i wore safety glasses... ;-)
[03:25:48] <Jymmm> wuss
[03:26:30] <Jymmm> Loetmichel: For $3 these work good...
http://www.harborfreight.com/industrial-ear-muffs-43768.html
[03:27:05] <Jymmm> Loetmichel: I ahven't tried them at the range yet
[03:27:26] <Jymmm> But for the router, laser, grinder, they work
[03:27:39] <Loetmichel> yes, i have them here... was just to lazy to put them on ;-)
[03:28:08] <Jymmm> I keep mine on a hook (in a plastic bag) on the wall so I'm not too lazy to use them.
[03:28:28] <Valen> i use mine all the time
[03:28:35] <Valen> even for hammering nails
[03:28:38] <Jymmm> the bag just keeps the dust off
[03:28:55] <Valen> of course my house is built of of steel that was carefully formed to look like timber
[03:30:20] <Jymmm> I need a 6" diameter SS plate, maybe 18ga or so
[03:30:48] <Loetmichel> http://www.cyrom.org/palbum/main.php?g2_itemId=13015 <- now some holes in it and then bending and hoping the 2 parts will fit ;-)
[03:31:14] <Valen> looks old school
[03:31:58] <Loetmichel> Valen: i have no CNC mill in the company
[03:32:09] <Loetmichel> and mine at home is to smallö for that
[03:32:21] <Loetmichel> so i have to build the prototypes by hand ;-)
[03:32:57] <Valen> i mean with all the rivet holes
[03:33:14] <Loetmichel> thats not rivet, tahts M2 thread
[03:33:19] <Loetmichel> m3
[03:33:52] <Loetmichel> and the count is because this is a enclosing for a Laptop brick PSU to shield it for EMI
[03:34:09] <Loetmichel> so you want even contact on all corners
[03:47:55] <awallin_> anyone here alive when this mill was made? :)
http://blog.makezine.com/2012/04/02/punch-tape-programmable-metal-mill-from-1952/
[03:49:19] <Valen> Loetmichel: I'd just wrap it in foil ;-P
[04:14:34] <Loetmichel> Valen: : foil: not good for soldier handling
[04:15:17] <Loetmichel> remember: sturdy-> idiot-proof -> soldier-proof ;-)
[04:23:42] <Valen> in that case i'd just get one that already meets the requiements
[04:23:53] <Valen> a power brick shouldn't be putting out that much emi
[04:23:59] <Valen> not if its actually been ticked
[04:36:41] <Loetmichel> Valen: thats OUR job: toget IT eqipment meet Sdip 27 ;-)
[04:37:26] <Loetmichel> soo, looks promising... ->
http://www.cyrom.org/palbum/main.php?g2_itemId=13018 http://www.cyrom.org/palbum/main.php?g2_itemId=13021
[04:37:44] <Valen> your going to get usefull info from a power brick radiation?
[04:37:48] <Valen> if you say so
[04:37:59] <Valen> It'd be easier to use a steel cylinder anyway
[04:47:20] <Loetmichel> ... now i have to make some threads and then paint the whole thiung
[04:47:52] <Loetmichel> not useful. buit german regulations are so that ALL emi have to stay below a certain level
[04:49:34] <Loetmichel> interesting side note: the EMI isnt coming from the power brick, but radiated back from the scanner it supplys, cuirrent modulation
[04:50:12] <Loetmichel> but to fit the power brick and cabling in a stee enclosure is easyer than filtering the power input inside the scanner ;-)
[04:51:17] <Loetmichel> and yes. we have a measurement chamber and are certified to do Sdip/nato measurements and certs ;-)
[04:52:11] <archivist> awallin_, possibly :)
[04:52:34] <archivist> a 50% chance ish
[09:09:00] <ssi> $88 for the flex couplers from hardinge
[09:09:17] <cradek> ssi: did you break one?
[09:09:22] <ssi> yeah
[09:09:29] <cradek> ouch
[09:09:39] <ssi> I silver soldered it back together, so I'm running again for now
[09:09:42] <cradek> easy to do, I broke one too
[09:10:18] <cradek> the axis can run away when they break
[09:10:22] <ssi> I'm pretty sure it was just high accel from oscillation while tuning that broke it
[09:10:32] <ssi> it didn't run away, cause it faulted
[09:10:56] <cradek> did you mess with the gear engagement in the resolver/tach gearbox?
[09:11:07] <cradek> mine broke when I made that too tight
[09:11:14] <ssi> I had the tach out
[09:11:24] <ssi> but I'm pretty sure the engagement was ok
[09:11:34] <ssi> it ran fine for a long time
[09:11:38] <cradek> ah
[09:11:48] <ssi> but I was tuning the axis, and I added some D term (which apparently I should never need)
[09:11:57] <ssi> and I saw a HUGE spike on error
[09:12:00] <ssi> and then the axis faulted
[09:12:06] <ssi> and the coupler was broken
[09:12:12] <cradek> yay for faults
[09:12:15] <ssi> yep
[09:14:01] <ssi> meeting, back in a bit
[10:17:14] <Valen> ssi i use a teensy teensy bit of d
[10:17:31] <Valen> .00something i think
[11:00:07] <ssi> back
[11:04:16] <ssi> alex4nder: around?
[11:05:52] <Loetmichel> re @ home
[11:23:40] <Jymmm> jthornton: You might look at the ping pong setting in xchat
[12:02:37] <mazafaka> If cutting depth is 1.5 mm, is it a lot easier for the inserts to bend the chip out from the surface of steel and therefore to stay sharp longer than if cutting depth is bigger.
[12:06:47] <archivist> see insert databook, depends
[12:20:00] <IchGuckLive> Hi all where ever you are
[12:24:19] <alex4nder> gents
[12:24:24] <alex4nder> ssi: hey
[12:40:47] <ssi> alex4nder: what's up
[12:40:58] <alex4nder> ssi: reading the news
[12:41:02] <alex4nder> what's going on with you?
[12:41:04] <ssi> alex4nder: I am contemplating getting started on this cam stuff
[12:41:09] <alex4nder> werd, do it
[12:41:16] <ssi> alex4nder: what are you using for an input format?
[12:42:02] <alex4nder> ssi: python
[12:42:55] <Thetawaves> huh?
[12:42:59] <ssi> yeah, huh?
[12:42:59] <alex4nder> I'll put up an example
[12:43:02] <ssi> yes please
[12:43:59] <IchGuckLive> ssi: why dont you use heekscad as a base
[12:44:09] <ssi> because it won't build
[12:44:12] <ssi> and I'm tired of screwing with it
[12:44:26] <Thetawaves> ssi, have you tried the opencascade fork?
[12:44:27] <IchGuckLive> ok
[12:44:32] <alex4nder> ssi:
http://pastebin.com/jasyMbBi <- this
[12:44:40] <alex4nder> ssi:
http://www.andern.org/alexander/taig_milling_wood.m4v <- produced that
[12:44:46] <ssi> Thetawaves: I'm not sure, I know I tried two separate ways of building it with no success
[12:45:03] <alex4nder> instant conversational milling.. just build a GUI around that concept.
[12:45:03] <Thetawaves> alex4nder, yeah i like that, what is that
[12:45:10] <ssi> alex4nder: yeah that's not bad
[12:45:14] <alex4nder> Python
[12:45:21] <Thetawaves> no
[12:45:25] <Thetawaves> RapidMoveTo
[12:45:33] <Thetawaves> or the Pocket module
[12:45:33] <alex4nder> it's a Python function
[12:45:37] <Thetawaves> where is this code
[12:45:37] <alex4nder> that I wrote
[12:46:31] <alex4nder> http://pastebin.com/9S8BK0h2 <-
[12:46:39] <IchGuckLive> in the wikipedia of linuxcnc i also have a python axis code that makes this
[12:46:40] <alex4nder> just don't make the initial version coplicated.
[12:46:48] <alex4nder> +m
[12:47:23] <FredrikHson> does anyone here know how to get a non standard baud rate for pyserial to work?
[12:47:24] <IchGuckLive> ssi:
http://wiki.linuxcnc.org/cgi-bin/wiki.pl?Simple_LinuxCNC_G-Code_Generators#Rectangular_Circular_Pocketing_Generator
[12:47:49] <alex4nder> FredrikHson: on Linux?
[12:47:53] <FredrikHson> yes
[12:48:17] <FredrikHson> i get to much error on 115200 baud rate but i should get 0% on 125000 instead
[12:48:18] <ssi> IchGuckLive: I'm specifically working toward lathe cam, which noone seems to do
[12:48:37] <FredrikHson> and i know this chip supports up to 2M without problem (under windows anyway)
[12:49:01] <ssi> alex4nder: I like your approach, that's a pretty decent way to go about it
[12:49:05] <IchGuckLive> FredrikHson: ser = serial.Serial(PORT, 9600)
[12:49:14] <ssi> alex4nder: but I still need to figure out a way to import complex profiles, say from dxf or something
[12:49:40] <FredrikHson> IchGuckLive: i can get that slow rate to work yes up to 19200 should work with a 0.2% error rate
[12:49:42] <alex4nder> ssi: yah, and then you have to come up with a tool path strategy
[12:49:46] <ssi> alex4nder: yes
[12:50:03] <IchGuckLive> ssi: i got a PROE NC that has lathe inside so im not used to this opensource
[12:50:03] <ssi> alex4nder: and I've got some thoughts on that... I'm just going to do it incrementally
[12:50:05] <alex4nder> ssi: I'd start with the tool path strategy.. the DXF is "easy"
[12:50:23] <ssi> alex4nder: yeah I agree... I just want to find a way to represent a profile that I can do work on
[12:50:30] <cradek> FredrikHson: uarts only support particular baud rates.
[12:50:31] <IchGuckLive> FredrikHson: yes 11500 is my limit
[12:50:50] <IchGuckLive> FredrikHson: pendant ?
[12:50:51] <ssi> alex4nder: and I don't know what the best way to do that is. I'm thinking that I'll represent it as a series of line and circular arc segments
[12:50:56] <FredrikHson> my lcd totally freaks out when i send xyz at the same time with that 115200 rate thanks to me picking a 20mhz crystal on this atmega chip
[12:51:07] <ssi> (basically as a list of G1,2,3 g code blocks{
[12:51:10] <archivist> FredrikHson, lack of flow control is the usual mistake not baud rate
[12:51:22] <FredrikHson> yes making a pendant with lcd got everything working other than feed/spindle override and the buggy lcd serial
[12:51:29] <Thetawaves> i run my megas at 20mhz and use 115200 all day
[12:51:31] <Thetawaves> no errors
[12:51:39] <FredrikHson> archivist: actually its the baud making it slower fixed all the errors i had
[12:52:09] <FredrikHson> sending more than one axis at once gives errors mostly on the z axis
[12:52:11] <alex4nder> FredrikHson: it's up to the serial driver to decide if the baud rate is valid.
[12:52:25] <alex4nder> FredrikHson: look at serialposix.py set_special_baudrate
[12:52:30] <FredrikHson> like -15.935 = +19749.062
[12:52:33] <archivist> FredrikHson, if you have no flow control then slower can help but it is still likely to bite you
[12:52:45] <Thetawaves> if you write the uart code for your megas properly, you will not have any errors..
[12:53:06] <Thetawaves> megas with a properly written uart handler will not need flow control....
[12:53:09] <IchGuckLive> FredrikHson:
http://www.youtube.com/watch?v=s5_4S24dW8w
[12:53:13] <cradek> archivist: AVRs don't have the ability to do hard flow control
[12:53:32] <archivist> cradek, xon xoff :)
[12:54:02] <cradek> I'm not sure they can do that either
[12:54:05] <alex4nder> ssi: what I would do is work out the math that leads to constant tool load, with 'easing' of the tool into the material
[12:54:20] <ssi> alex4nder: yeah, that's my plan
[12:54:21] <archivist> should be in the driver code
[12:54:25] <ssi> ramp plunge
[12:54:55] <alex4nder> ssi: so I would work backwards from the desired profile, to the original stock profile.. and the replay those steps in reverse.
[12:55:08] <ssi> that's a reasonable approach
[12:55:08] <jepler> arduino has no provision for hardware flow control, and you can't do anything (like assert a hardware flow control pin or send an XOFF control code) without handling the receive interrupt
[12:55:24] <jepler> but if you can do *that* then there's no need to implement flow control
[12:55:33] <ssi> well my first thought is to have a way to scan a profile and determine the maximum back clearance angle necessary to produce it
[12:55:57] <ssi> ie maximum negative slope of any single point of the profile
[12:56:07] <ssi> and make sure that the selected tool is capable of reaching all points
[12:56:27] <IchGuckLive> ssi: blendercam is open and has a python lathe cam module inside
[12:56:57] <ssi> IchGuckLive: it's not on the first page of google
[12:56:59] <ssi> does it exist? :P
[12:57:32] <Jordan_> ssi you think it would be possible to attach a motor at each end of threaded rod, reverse input to get double torque?
[12:57:56] <ssi> Jordan_: might be dicey
[12:58:05] <Jordan_> what are the problems
[12:58:21] <ssi> differential acceleration or velocity
[12:58:30] <ssi> you'll need flex couplers at minimum
[12:58:39] <Jordan_> you mean motors not running the same
[12:59:03] <IchGuckLive> ssi: im still on blender2.49b thats 3years old will check this
[12:59:03] <ssi> yes
[12:59:09] <Jordan_> damn it
[12:59:21] <Jordan_> why wouldn't they run the same
[12:59:32] <ssi> because the universe is not perfect
[12:59:39] <Jordan_> damn universe
[12:59:57] <Jordan_> so they wouldn't even be close enough
[13:00:06] <ssi> I don't know
[13:00:08] <ssi> maybe they would
[13:00:09] <IchGuckLive> ssi
http://wiki.linuxcnc.org/cgi-bin/wiki.pl?GcodeGenerator
[13:00:56] <Jordan_> well someone must of tried this
[13:01:12] <Jordan_> don't you think
[13:01:38] <alex4nder> IchGuckLive: matrix milling?
[13:01:48] <alex4nder> rasteriszed.. whatever
[13:02:04] <Jordan_> it would be stupid not to
[13:02:17] <alex4nder> wut
[13:02:51] <Jordan_> attaching two motors one at each end of rod for double torque
[13:04:07] <Jordan_> either double torque or use 2 really cheap motors for same torque
[13:06:04] <Jordan_> is anyone here stupid enough to try this?
[13:06:50] <Jordan_> how about you ssi?
[13:07:21] <Jymmm> how about you try it Jordan_?
[13:07:24] <Thetawaves> you are doing it wrong
[13:07:27] <Thetawaves> mount the motors together
[13:07:51] <alex4nder> you need to go human centipede
[13:07:53] <Jordan_> ha, i'm not that stupid
[13:07:55] <alex4nder> s/human/motor/
[13:07:59] <Thetawaves> you won't need a flex cuff with proper alignment, and you bolt them together to ease alignment
[13:08:02] <Jymmm> alex4nder: LOL
[13:08:10] <Jymmm> alex4nder: and Ewwwwwwwwwwwwwwwwwww
[13:08:17] <alex4nder> haha
[13:08:35] <Jymmm> alex4nder: and #2 is coming out
[13:08:36] <Thetawaves> cuff ... coupling
[13:08:46] <alex4nder> Jymmm: out of which end?
[13:09:01] <Jymmm> alex4nder: this summer it's supose to be released
[13:09:13] <Jymmm> alex4nder: HC2
[13:09:35] <alex4nder> Jymmm: laf
[13:09:35] <Jymmm> ?
[13:09:56] <alex4nder> I'm frightened.
[13:10:15] <Jymmm> alex4nder:
http://www.imdb.com/title/tt1530509/
[13:10:44] <Jymmm> oh, it's already out
[13:11:28] <Jymmm> alex4nder: HAHAHAHAHAHA
http://www.studiobriefing.net/2011/11/australia-bans-human-centipede-ii/
[13:11:55] <alex4nder> I'm sorry Jordan_ , your motor combination will not be allowed down under.
[13:11:59] <Thetawaves> that movie was great
[13:12:06] <IchGuckLive> ssi:
http://code.google.com/p/pyturn/downloads/list here is the code
[13:12:09] <Thetawaves> at making me hate old german dudes
[13:12:26] <Jordan_> what are flex cuffs for
[13:12:59] <Thetawaves> flex coupler sorry
[13:13:03] <Thetawaves> flex cuffs are zip ties
[13:13:19] <Jordan_> what are flex couplers for
[13:13:58] <Thetawaves> they allow for minor misalignment
[13:14:15] <Jordan_> of what in what application
[13:14:20] <Jordan_> or misalignment
[13:14:24] <Jordan_> oh*
[13:14:28] <Thetawaves> two shafts in any rotating shaft situation
[13:14:46] <Jordan_> so it won't let them decouple spin
[13:14:56] <Thetawaves> some may
[13:15:08] <Jordan_> but you wouldn't want that for 2 motors
[13:15:24] <Thetawaves> huh?
[13:15:46] <Jordan_> a motor at each end
[13:15:55] <Thetawaves> why not two motors attached together?
[13:16:11] <Jordan_> becuase that's double speed not double torque
[13:16:11] <IchGuckLive> i use 2motors double traction with timebelts
[13:16:22] <FredrikHson> i don't suppose there is a way to do all this hal interfacing with c++ instead of python by any chance?
[13:16:30] <Thetawaves> Jordan_, wat
[13:16:37] <Jordan_> IchGuckLive, pic?
[13:16:38] <Thetawaves> how would that be double speed?
[13:16:43] <alex4nder> haha
[13:16:52] <Jordan_> actually i don't know what you mean by attaching them together
[13:17:03] <alex4nder> Jordan_: ass to face
[13:17:12] <IchGuckLive> Jordan_: no
[13:17:32] <Jordan_> i'm not putting my ass to my face
[13:17:38] <Jordan_> lol jk
[13:18:24] <Jordan_> i still don't see how that work you mean the shaft goes through the 2 motors?
[13:18:55] <IchGuckLive> 2 timebelt systems in a row eatch pulled by a motor
[13:19:02] <Thetawaves> you have a flex coupler to adjust between misalignment of the screw and motor shaft, if you bolt two motors together you just need a regular shaft coupler because (i assume) the motor - motor alignment is easily done
[13:19:54] <Jordan_> i'd have to see an example
[13:23:37] <ssi> IchGuckLive: taking a look
[13:23:41] <ssi> IchGuckLive: have you worked with it?
[13:23:46] <IchGuckLive> no
[13:24:12] <IchGuckLive> this is from davisd falk how does the heekscam
[13:24:30] <Jordan_> Thetawaves, you got one?
[13:24:37] <IchGuckLive> so its based on the iso gcode python routines
[13:25:54] <IchGuckLive> im off for today by
[13:27:06] <ssi> hrm
[13:27:13] <ssi> that code he linked is exactly one python file
[13:27:17] <ssi> 9k
[13:27:21] <ssi> a handful of functionns
[13:28:12] <Thetawaves> no examples.
[13:28:30] <Thetawaves> i know one guy on freenode stacked two stepper motors for more torque
[13:29:02] <Spida> does that work?
[13:29:23] <Thetawaves> he claimed it did.
[13:29:28] <Thetawaves> and i don't see why it wouldn't
[13:29:33] <Spida> better than a single one?
[13:29:43] <Thetawaves> double the better, obviously
[13:30:34] <ssi> haha
[13:38:39] <Jordan_> can get a pic
[13:38:41] <Jordan_> i want to see it
[13:39:05] <Jordan_> i'm still not sure exactly how it mounts, why not just put them on opposing ends?
[13:45:09] <Thetawaves> Jordan_, why would that be better? your screws should be much big enough that it doesn't matter where the torque is applied
[13:45:22] <Thetawaves> s/much//
[13:45:37] <Jordan_> for easier mounting
[13:46:36] <Thetawaves> and what i suspect to be harder alignment
[13:46:44] <Thetawaves> so you need two flex couplers instead of 1
[13:47:27] <Jordan_> so they go ass to face right
[13:47:42] <Thetawaves> yeah
[13:48:03] <Jordan_> so it's got to be a motor with a shaft that goes through both ends
[13:48:26] <Thetawaves> yeah
[13:48:33] <Jordan_> well that limits your options
[13:48:39] <Thetawaves> but you've got those kind anyway right?
[13:49:24] <Jordan_> i think it's easier to find and cheaper if it just goes through one end
[13:49:56] <Thetawaves> most cnc steppers have a hand wheel mounted on the back
[13:50:04] <Jordan_> what's that
[13:50:06] <alex4nder> s/most/some/
[13:50:42] <gene_> Only the ones I've bought from somebody like Herbach &Radman have been single ended
[13:51:14] <Jordan_> oh mine do have a hole on the back
[13:51:25] <Jordan_> is there a way to attach them
[13:52:35] <ssi> Jordan_: are these your $2 floppy drive steppers?
[13:52:40] <Jordan_> lol no
[13:52:50] <ssi> are they honest to god nema frame motors?
[13:52:57] <Jordan_> yes
[13:53:00] <Jordan_> nema17
[13:53:06] <Jordan_> but i still do have my eye on those ssi
[13:53:46] <gene_> Need man translation guys
[13:54:16] <gene_> when it says (bit), is this a net, a setp or an addf?
[13:54:21] <Jordan_> give me one good reason not to use 2 of those in series
[13:54:47] <Jordan_> well actually i guess it would be parallel circuitly speaking
[13:54:53] <Thetawaves> you have to fabricate more parts?
[13:55:13] <Jordan_> like what
[13:55:27] <Jordan_> drill a few holes in an aluminum block
[13:56:12] <FredrikHson> found the problem wasn't the baud rate even tho making changes did fix that but instead it was the buffer that was being overrun
[13:56:28] <Thetawaves> i told you
[13:56:42] <Thetawaves> i spent a lot of time making it 100% correct
[14:00:02] <jthornton> gene_, what are you trying to do?
[14:00:20] <jthornton> (bit) is off and on 1 or 0 more or less
[14:09:49] <XXPCWXX> net and setp could apply to a bit (but not addf)
[14:09:50] <Jordan_> hmm, if i put them in parallel the resistance would go down on them
[14:11:59] <Jordan_> how does that work, do you have to raise the voltage 2x
[14:12:07] <djdelorie> same voltage, twice the current
[14:12:21] <djdelorie> each sees the same voltage/current as before
[14:12:25] <Jordan_> oh right
[14:12:36] <Jordan_> half the resistance
[14:12:41] <Jordan_> 2x currernt
[14:13:28] <Jordan_> would it change any characteristics about them you think
[14:14:46] <Jordan_> the resistances probably won't be exactly the same, so one will get slightly more current
[14:16:02] <gene_> Hi John; trying to setup my spindle encoder. It runs in quadrature, with an index per rev, and has 39 holes in the disk. How do I calculate position-scale?
[14:16:55] <XXPCWXX> why such a weird number?
[14:17:14] <gene_> it fit the available diameter?
[14:18:20] <gene_> That theoretically gives me a resolution in the 2.3 degree range
[14:18:28] <XXPCWXX> so 156 counts/turn
[14:20:37] <gene_> that looks right, but then I want to see it in the gui too eventually
[14:21:46] <XXPCWXX> did you look at the spindle synchronized motion section of the integrators manual?
[14:21:48] <XXPCWXX> Looks like the scale is just counts per turn
[14:22:21] <djdelorie> 36 holes would have gotten you exactly 2.5 degrees...
[14:23:35] <gene_> no, I haven't. DJ, but then the duty cycle would have been munged, this is very close to a 50% cycle with good quadrature
[14:25:54] <gene_> That looks like the encoder-ratio stuffs?
[14:26:01] <XXPCWXX> integrators manual page 226
[14:26:22] <XXPCWXX> has a good example
[14:26:30] <gene_> I don't think my copy is new enough, but lemme check
[14:26:31] <FredrikHson> perfect solved my problems without going for a 100% perfect baud rate :D
[14:26:46] <FredrikHson> just by actually checking how much stuff i had in the damn buffer
[14:27:03] <XXPCWXX> there never is a 100% perfect baud rate...
[14:27:09] <FredrikHson> sure there is
[14:27:38] <FredrikHson> 125000 and 250000 was perfect rates for this chip at this crystal speed
[14:27:49] <FredrikHson> and yes the crystal isn't 100.00000000% perfect
[14:28:11] <XXPCWXX> and its not the same as the crystal on th other end...
[14:28:12] <gene_> No, not by a couple years.
[14:29:11] <jthornton> gene_, have you read this?
http://linuxcnc.org/docview/2.5/html/examples/spindle.html#_spindle_feedback_a_id_spindle_feedback_a
[14:29:45] <jthornton> well I think I finally got the AC back up and working...
[14:31:18] <gene_> Found the right page, was looking in wrong 3 ring
[14:31:35] <XXPCWXX> is it AC time in MO? Still cold here
[14:32:09] <gene_> Got that on screen too, thanks
[14:34:18] <JT-Shop> we have had unseasonable warm weather for the last month
[14:34:25] <JT-Shop> mid 80's
[14:34:59] <XXPCWXX> its mid 50s right now
[14:35:16] <JT-Shop> nice!
[14:36:49] <XXPCWXX> Its just weird this year we had 80s in Feb
[14:37:20] <JT-Shop> that is weird
[14:37:48] <JT-Shop> can the parallel port drive a pc speaker somehow?
[14:38:15] <frysteev_> yup
[14:38:18] <frysteev_> pwm
[14:38:28] <frysteev_> it can make 'sound'
[14:38:51] <frysteev_> but what kind of sound is a different matter
[14:39:09] <frysteev_> my 120v wall socket can also drive a speaker:P
[14:39:18] <frysteev_> also success on the laser hoist will have pics soon
[14:39:19] <ssi> it's high 70s low 80s here now already
[14:40:27] <gene_> 80F here on my back porch in WV, USA, 72F in this garage
[14:40:45] <gene_> humm, didn't like something:
[14:40:49] <ssi> I lied, it's 87 here
[14:40:58] <gene_> my-lathe.hal:59: Signal name 'encoder.0.phase-A' must not be the same as a pin. Did you omit the signal name?
[14:41:18] <Jordan_> getting abnormally hot here too
[14:43:05] <gene_> I thought encoder.0.0phase-A was a name???
[14:45:15] <ghfhjgfjhgfhjgfh> Hello i have a problem with Axis. is it possible to stop axis showing error gcode massages?
[14:47:06] <djdelorie> sure, give it valid gcode :-)
[14:47:16] <JT-Shop> yep
[14:47:27] <gene_> concur
[14:47:42] <mhaberler> djdelorie: re traveling salesman path optimization: I gave the wrong link yesterday. This one is easy to build and should be able to do 3d tours:
http://www.akira.ruc.dk/~keld/research/LKH/
[14:48:54] <djdelorie> I was thinking of making a "test pattern" of holes, say 20x20 on a 0.030" grid, for timing. But to time the accuracy and speed, I'd want a fixed pattern; TSP would not give me testable results
[14:49:12] <djdelorie> for example, I'd want ever other hole to be on the "other side" of the previously drilled hole, to test backlash
[14:49:24] <mhaberler> oh. I thought you were in for a speed record ;)
[14:49:36] <ghfhjgfjhgfhjgfh> the problem is that the code is valid. I read a analog signal over m66 and put it to a g1 command. But when axis starts the analog signal is zero
[14:49:47] <gene_> what did I miss in this:
[14:49:52] <djdelorie> in the end, yes. I'm breaking it down into two parts: testing the speed of individual holes, and testing the travel speed for an arbitrary pcb
[14:49:57] <gene_> loadrt encoder num_chan=3
[14:49:59] <gene_> addf encoder.update-counters base-thread
[14:50:00] <gene_> addf encoder.capture-position servo-thread
[14:50:02] <gene_> setp encoder.0.counter-mode false
[14:50:03] <gene_> setp encoder.0.x4-mode true
[14:50:05] <gene_> setp encoder.0.position-scale 156.0000
[14:50:06] <gene_> net spindle-position encoder.0.position => motion.spindle-revs
[14:50:08] <gene_> net spindle-velocity encoder.0.velocity => motion.spindle-speed-in
[14:50:09] <gene_> net spindle-index-enable encoder.0.index-enable <=> motion.spindle-index-enable
[14:50:11] <gene_> net encoder.0.phase-A parport.0.pin-12-in
[14:50:12] <gene_> net encoder.0.phase-B parport.0.pin-15-in
[14:50:14] <gene_> net encoder.0.phase-Z parport.0.pin-13-in
[14:50:30] <djdelorie> beep! beep! beep! beep! beep! ;-)
[14:51:27] <archivist> irc overflow error at line 3
[14:51:58] <mhaberler> oh. awallin was on the TSP case already:
http://www.anderswallin.net/page/13/?s
[14:52:11] <gene_> there are now <= signs in the last three lines, same error
[14:52:38] <XXPCWXX> gene_ you need a "wire" name for the net
[14:52:57] <gene_> whats a 'wire'
[14:52:59] <XXPCWXX> net A0 encoder.0.phase-A parport.0.pin-12-in
[14:53:12] <XXPCWXX> A0 is the "wire"
[14:53:54] <gene_> then what are the other 2? B0, Z0?
[14:54:06] <XXPCWXX> anything you like
[14:54:14] <jthornton> no that is a signal
[14:54:28] <gene_> but it should make sense
[14:54:35] <jthornton> gene_,
http://linuxcnc.org/docview/2.5/html/hal/basic_hal.html
[14:54:36] <XXPCWXX> yes
[14:56:05] <jthornton> gene_, it must be "net signal-name [pins]
[14:56:17] <jthornton> like
[14:56:53] <XXPCWXX> sorry, I tend to think of signals as "wires"
[14:57:02] <jthornton> net my-signal parport.0.pin-10-in
[14:57:41] <jthornton> well they are in a sense wires as they connect things together
[14:58:28] <jthornton> I just said signal as that is what is used in the manual
[15:00:20] <gene_> adding an A-phase, B-phase and Z-index seems to have solved that, at least it will start
[15:00:41] <gene_> Now what do I do with these 'signals?
[15:01:23] <XXPCWXX> dont need to do anything if you dont need them
[15:01:32] <JT-Shop> yep
[15:02:47] <XXPCWXX> if it bothers you you can always use it this way:
[15:02:49] <XXPCWXX> net A0 encoder.0.phase-A
[15:02:51] <XXPCWXX> net A0 parport.0.pin-12-in
[15:02:53] <XXPCWXX> which is equivalent to:
[15:02:55] <XXPCWXX> net A0 encoder.0.phase-A parport.0.pin-12-in
[15:03:50] <gene_> At some point I want a constant linear speed, and of course to cut threads, but this will do till I get all this installed on the lathe, which is waiting on the proper parportconnectors
[15:06:09] <XXPCWXX> Now if HAL would just have a string type...
[15:07:07] <JT-Shop> I thought there was a comp that did string error messages or something like that
[15:07:13] <djdelorie> how do you send a string over a wire? ;-)
[15:07:30] <JT-Shop> gene_, do you mean constant surface speed?
[15:08:23] <XXPCWXX> I mean native type so a driver can pass more connection/scale/unit hints to HAL
[15:08:38] <JT-Shop> yea, that would be cool
[15:09:34] <XXPCWXX> C Morely already hates us for the SSERIAL discovery stuff But we can make it much worse!
[15:10:27] <JT-Shop> LOL
[15:15:35] <ssi> I want to get CSS and threading working on my lathe! :'(
[15:16:07] <djdelorie> I got CSS working on my web server, does that help? ;-)
[15:16:12] <ssi> NO
[15:16:15] <djdelorie> ;-)
[15:16:27] <djdelorie> I'm still learning how to use my lathe *manually*
[15:16:50] <djdelorie> http://www.delorie.com/photos/southbend-lathe/img_2617.html
[15:17:21] <ssi> nice plotter :P
[15:17:38] <djdelorie> that's the spare for the bigger one
[15:18:28] <djdelorie> the big one is 36" wide with a roll feeder and color print head. It required some parts from the little one and some purchased replacement parts to get it working
[15:19:41] <djdelorie> however, its print head is failing too, probably bad connections on the big ribbon cable. Yet another project.
[15:29:19] <JT-Shop> ssi, hook up your spindle encoder
[15:30:56] <djdelorie> in the case where linuxcnc is reading the encoder, what kind of motor/driver is commonly used?
[15:31:35] <cradek> velocity mode analog controlled servos are very nice in that setup
[15:31:46] <djdelorie> DC or three-phase ?
[15:31:50] <cradek> torque mode also work but take more care to tune
[15:31:57] <cradek> either dc or ac, doesn't matter
[15:32:38] <djdelorie> hmmm... mine are BLDC three phase, and the controller use velocity control at one level of the control loop, would it be better to give linuxcnc control over them?
[15:32:51] <djdelorie> (it would be HARDER just wondering if linuxcnc would do a better job)
[15:33:49] <cradek> hard to say. it would eliminate your step rate problems. it would let you see following error in halscope and tune your loop responses with hal's pid.
[15:33:56] <djdelorie> I haven't tuned the control loop well enough to eliminate the lag between "should be at" and "actually at" yet
[15:34:13] <cradek> it could track the machine when the amps are turned off (like after a fault or when manually moving it)
[15:34:33] <djdelorie> I can already do those with my controllers just by hooking up the serial port :-)
[15:34:37] <cradek> you could home to encoder index pulse to get repeatable positions to exactly one count
[15:34:54] <djdelorie> and they maintain tracking when motor power is cut, like for estop
[15:35:13] <cradek> sure you may have reimplemented some features already :-)
[15:35:14] <djdelorie> hmmm... I could gate the home signals on the encoder index pulse too
[15:35:36] <cradek> then you have to travel VERY slowly to not miss it.
[15:35:57] <djdelorie> it's cought in hardware
[15:36:17] <djdelorie> but axis would have to do the back-off-try-again-slowly trick anyway, right?
[15:36:18] <cradek> real encoder counters tell hal that the index has passed since the last reading, and then the subsequent count afterward
[15:36:45] <djdelorie> I've got all that in hardware already... too bad I can't just hook up the CAN bus
[15:36:50] <cradek> no, you don't have to home slowly.
[15:37:33] <djdelorie> no, the hardware doesn't require it. It can catch the pulse at full RPM
[15:38:40] <cradek> but how do you tell linuxcnc, if you're step dir only?
[15:38:45] <djdelorie> at max RPM, those signals are in the 50 KHz range, and there would be six of them, plus three index pulses. I'd need a faster PC...
[15:39:03] <djdelorie> the controllers have step/dir, CAN, and serial on them.
[15:39:06] <cradek> that's why you use a mesa card (et al) to do the counting
[15:39:07] * pfred1 has a faster PC now :)
[15:39:38] <alex4nder> djdelorie: what software do you have running on the controllers?
[15:39:47] <pfred1> [ 0.008003] Calibrating delay loop (skipped), value calculated using timer frequency.. 4999.85 BogoMIPS (lpj=9999704)
[15:40:05] <djdelorie> easier would be if axis could send the "I think you're running at this RPM" over CAN, and still step/dir over parallel. Then I could adjust the inner control loop on the fly
[15:40:18] <djdelorie> alex4nder: a bunch of C code I wrote myself
[15:40:53] <cradek> step/dir is position, so I'm not sure what you mean
[15:41:18] <cradek> don't your drives have commanded and feedback position and pid etc?
[15:41:20] <pfred1> well they are commands to position
[15:41:22] <alex4nder> djdelorie: yah, don't think I'd put any of that closed-loop control on the PC if I could help it.
[15:41:43] <djdelorie> my current inner loop uses "how far off target am I" to set the desired RPM. If I could offset the "desired RPM" by what axis wanted, it would track closer to target
[15:41:49] <djdelorie> My pid-fu sucks ;-)
[15:41:59] <cradek> alex4nder: it's the best way with many many advantages (read back)
[15:42:18] <djdelorie> so, at the moment, the faster the motors are actually spinning, the more off the positioning is
[15:42:28] <pfred1> makes sense
[15:42:31] <cradek> djdelorie: pid-ff in hal is excellent
[15:42:31] <djdelorie> it's not much, but it still bothers me ;-)
[15:43:05] <djdelorie> hmmm... long term, a hal module for a can controller would let me send out the "assumed RPM" to the controllers, yes?
[15:43:09] <cradek> I'm a bit puzzled by your implementation then
[15:43:30] <cradek> I guess so...
[15:43:41] <cradek> linuxcnc outputs positions
[15:43:41] <pfred1> who is the mesa guy that usually hangs out here?
[15:43:44] <djdelorie> in a nutshell, I calculate actual and desired position. Based on that, I calculate actual and desired RPM. Based on that, actual and desired winding current. Based on that, voltage.
[15:44:21] <djdelorie> there's an I term to lock it on position when it stops too, in case there's a static load
[15:44:53] <djdelorie> cradek: the axis display has speed, I assume hal has a signal for each axes' speed ?
[15:45:08] <cradek> can't you plot or scope your following error somehow?
[15:45:21] <djdelorie> it would be something a display add-on would want.
[15:45:23] <cradek> if you have static error at certain speeds you shoud implement ff and tune it
[15:45:30] <cradek> should
[15:45:50] <pfred1> so like a servo?
[15:45:54] <djdelorie> Sure, I know exactly what the following error is. I just don't know what axis is planning so I don't know how to compensate for it
[15:46:08] <djdelorie> pfred1: it's like a servo, yes.
[15:46:09] <cradek> the position error tells you
[15:46:34] <cradek> if you are getting a position error proportional to velocity you need feedforward
[15:46:43] <djdelorie> again, my pid-fu sucks ;-) I have a friend who's better at pid than I am, but he hasn't been able to come over and help since I got it working
[15:46:56] <pfred1> buy better beer
[15:47:13] <djdelorie> his job involves travel. I can't buy him *that* much beer
[15:48:07] <ssi> JT-Shop: spindle encoder IS hooked up!
[15:48:08] <pfred1> djdelorie from what I saw of your drives they are high performance I hope you get them sorted out
[15:48:12] <ssi> er, resolver is
[15:48:27] <djdelorie> so, actual rpm -> offset correction -> desired rpm -> ... ?
[15:48:34] <djdelorie> that sounds like positive feedback to me
[15:48:57] <pfred1> don't all servos need feedback?
[15:49:13] <cradek> it's not an offset you want, it's proportional to velocity, ff1
[15:49:15] <pfred1> see this is why I went with steppers
[15:49:35] <djdelorie> pfred1: my motors have both hall sensors and 100-line encoders on them. They're connected to the controller.
[15:49:46] <cradek> there's nothing wrong with servos, but there's a slight problem making a step-servo controller without understanding pid :-)
[15:50:06] <pfred1> cradek I figured start out small and work my way up
[15:50:21] <pfred1> linuxcnc can be enough to get going
[15:50:29] <djdelorie> I have the P and I parts ok, D makes the motors panic. It's just following error I'm working on
[15:50:47] <pfred1> ah you need hysterisis (sp)
[15:50:50] <djdelorie> the problem is, most PID tutorials are designed for RPM being the target, not position
[15:51:24] <cradek> that doesn't matter, you're just off by a derivative
[15:51:27] <ssi> yep
[15:51:27] <djdelorie> pfred1: yeah, there's special code for when it's only off by a few counts. Usually it sits on a line edge and humms when it should be stopped.
[15:51:31] <ssi> position is integration of rpm :)
[15:51:54] <djdelorie> yeah, I know, but the "plus a constant" makes it harder
[15:52:21] <cradek> that is 'deadband' and of course hal's pid has it too
[15:52:42] <pfred1> one thing I've grown used to is strange noises when it comes to CNC
[15:52:56] <djdelorie> so back to my math; if I use the actual current RPM to offset my calculations for desired RPM based on measured lag, it should "just work"?
[15:53:04] <pfred1> there are youtube videos of people playing music on their CNC machines
[15:53:16] <djdelorie> speaking of strange noises: why does stepconf let you put estop on a pin, but not machine on/off ?
[15:53:37] <cradek> djdelorie:
http://linuxcnc.org/docview/html/man/man9/pid.9.html <- read about pid.N.FF1
[15:53:52] <pfred1> stepconf is great but text editing the ini file is not to be overlooked
[15:54:11] <cradek> djdelorie: "machine on" is "amp enable", meant to power up servo amps or stepper drives
[15:54:18] <djdelorie> ah, so I tell axis what my follow error is, and let *it* compensate ?
[15:55:07] <cradek> in a normal setup, position feedback goes into hal, and velocity command (made with pid) goes out of hal
[15:55:22] <cradek> then you can monitor everything with halscope and tune the loop
[15:55:35] <djdelorie> assuming I don't want to re-engineer my control boards, can I use the pid in hal to *just* to FF1 ?
[15:55:41] <cradek> commanded position comes from linuxcnc into hal's pid
[15:56:26] <djdelorie> at the moment, the lag is (almost) exactly 10 RPM per step (or one step per 10 RPM)
[15:56:31] <cradek> perhaps you could run software stepgen in velocity mode, commanded by hal's pid
[15:56:35] <pfred1> djdelorie I don't want to rain on yoru parade but my present drivers are hardly the first ones I made :)
[15:56:50] <pfred1> until it works everything is in a state of flux
[15:57:05] <djdelorie> I'm sure I'll redo many things over time, I'm just looking for something that works with what I've got first
[15:57:06] <cradek> if the ferror is linear proportional to velocity then FF1 is exactly the fix
[15:57:39] <djdelorie> it is, "desired RPM" is N times position error, and I can track desired RPM pretty closely
[15:58:00] <cradek> isn't your pid in firmware? why not just add ff1?
[15:58:10] <djdelorie> that was my "back to my math" question
[15:58:25] <cradek> perhaps check out pid.c?
[15:58:35] <djdelorie> perhaps
[15:59:38] <ssi> I wrote a pid implementation once
[15:59:42] <ssi> for a quadrotor
[15:59:46] <ssi> it was a pain in the ass :)
[16:00:11] <ssi> and at the end of the day, I couldn't make the motors respond fast enough to get it stable... too much rotor inertia
[16:00:37] <djdelorie> treat inertia like inductance, and calculate power accordingly? Or just not enough power?
[16:01:13] <djdelorie> my lowest loop does the inductance/current/volts math so that the correction finishes just as the next control loop checks it
[16:02:04] <djdelorie> but it means sometimes you get a voltage spike on purpose, to make a fast change in current
[16:03:11] <pfred1> from here on in I'm buying all of my PC hardware from this place
http://www.superbiiz.com/
[16:03:36] <djdelorie> why?
[16:03:53] <pfred1> I ordered a PSU off them 2 days ago picked free ground shipping its in the machine
[16:04:11] <pfred1> the guy must be down the street from me it got here so fast
[16:04:26] <djdelorie> I get that from newegg, but I might be closer to them than you are
[16:04:49] <djdelorie> for digikey, USPS is faster than UPS because of what zones we're in :-)
[16:05:49] <pfred1> I ordered some caps off mouser it was insane what they charged me for shipping
[16:06:31] <alex4nder> djdelorie: you in california?
[16:06:34] <djdelorie> I talked with the digikey folks about shipping a while back, they charge what they pay, and they have a "USPS first class" option so it's just a few bucks.
[16:06:38] <djdelorie> Er, no? New Hampshire
[16:07:07] <pfred1> I tried to go fishing in new hampshire once
[16:07:22] <pfred1> that was a disaster
[16:07:36] <djdelorie> we're not known for our fishing, I think.
[16:07:49] <pfred1> I was way up I93
[16:07:52] <djdelorie> more for our fall foliage
[16:08:43] <pfred1> I didn't feel like driving all the way to Maine I wanted to go someplace different
[16:09:36] <pfred1> I met these creepy people at this conveinence store attached to a gas station
[16:09:50] <pfred1> I was like I ain't camping out here!
[16:10:29] <pfred1> from what I gathered they were there to buy a flashlight because one of them lost their rucksacks in the woods and it sure sounded to me like they lived in the woods
[16:10:40] <djdelorie> we're not known for our creepy people at gas stations either, though...
[16:10:50] <djdelorie> but we *are known for our camping sites
[16:11:02] <pfred1> this one guy had this scar man it was like the grand canyon
[16:11:14] <pfred1> and he was missing a couple of fingers which he kept on pointing with
[16:11:28] <pfred1> he was saying to me, you must have come up through the cut ...
[16:11:29] <djdelorie> I have a cousin like that. Industrial accident.
[16:11:36] <djdelorie> the notch?
[16:11:49] <pfred1> might have been notch I kind of remember he said cut
[16:12:12] <DJ9DJ> gn8
[16:12:33] <djdelorie> there are two places where the road goes through a notch in the moutain range to get to the north side of them, probably what he was referring to
[16:12:40] <djdelorie> roads
[16:13:03] <pfred1> well it was a half baked plan i just got in my car and drove figured I'd find someplace when I got there
[16:13:17] <pfred1> but by the time I got there it was like 2:30 in the morning
[16:13:49] <pfred1> it was a gas station the name of it was all these hypnehated to letters like wa-ko-ma-re
[16:13:55] <djdelorie> next time, either look up the state park system ahead of time, or ask one of the local boy scout troops
[16:14:49] <pfred1> looked like pretty country what I could see of it I'm sure if it was daytime I'd have managed
[16:15:10] <djdelorie> next time you decide to tour NH, ask me first :-)
[16:15:29] <pfred1> usually I go to upstate Maine to Allagash
[16:15:47] <pfred1> that is like another planet
[16:17:05] <pfred1> well now I'm distro shopping I'm tired of Debian I think
[16:17:22] * pfred1 has to decide what to load on this box
[16:17:24] <Tom_itx> :(
[16:17:33] <Tom_itx> what do you have against debian?
[16:17:36] <pfred1> man i can't hack grub2
[16:17:46] <pfred1> or KDE 4
[16:17:57] <djdelorie> Fedora! ;-)
[16:18:03] <pfred1> I need to try to install 3.5.10 on my machine upstairs
[16:18:19] <pfred1> I ran RH from 7.1 to 7.3
[16:18:28] <pfred1> it was the snizzle back then
[16:18:46] <pfred1> if they didn't do that paid subscription for up2date they'd be a lock today
[16:19:11] <pfred1> I mean everyone and their dog ran RH in that window
[16:19:16] <djdelorie> Fedora doesn't charge for updates. You're thinking of RHEL
[16:19:28] <pfred1> this was at the dawn of that
[16:20:12] <pfred1> I bet I still have a defunct box kicking around with an RH7.X install on it
[16:21:04] <pfred1> first i have to try this box with the emc2 iso I have just to see
[16:21:23] <pfred1> right now I'm on a USB stick running Ubuntu 11.10
[16:21:44] <pfred1> I wanted to make sure it could boot off USB
[16:22:25] <pfred1> ack! E: Unable to locate package htop
[16:23:33] <pfred1> so far I like this PC
[16:24:04] <pfred1> I got a sweet deal on an antec PSU for it $34
[16:24:13] <Jymmm> too much!
[16:24:18] <pfred1> gtfo!
[16:24:31] <Jymmm> pfred1: it's $3 TO $4, not $34
[16:24:45] <pfred1> you can go too lowball on PSUs
[16:24:59] <Jymmm> nah
[16:25:02] <pfred1> I want a seasonic for my i3
[16:25:14] <Jymmm> a waste for an i3 it seems
[16:25:24] <Jymmm> i5 i7 sure, but i3 ?
[16:25:33] <pfred1> well i7s haven't dropped in price enough for me to drop the hammer on one
[16:25:48] <Jymmm> not wirth it even if they did, i5 be it mon!
[16:25:54] <pfred1> to be honest the i3 ain't bad
[16:26:02] <djdelorie> power supplies is one item I spend extra on for good quality, I've been burned in the past
[16:26:06] <Jymmm> kinda a waste
[16:26:12] <djdelorie> OTOH my machines tend to be more power-hungy than average
[16:26:15] <pfred1> I lost two mobos to a bad PSU
[16:26:29] <Jymmm> djdelorie: quit playig with explosives then
[16:26:32] <pfred1> it took me burning out the second one to realize what was going on
[16:26:49] <pfred1> but the thing must have been pumping out so much ripple the mobos couldn't deal with it
[16:27:09] <pfred1> I mean they'd run for a bit then blammo
[16:27:23] <djdelorie> heh. six-core i7-EE, 24GB ram, three hard drives, two video cards, a few other cards and optical drives, a bazillion USB things...
[16:27:23] <pfred1> bad PSU means system stress
[16:27:42] <Jymmm> djdelorie: video cards did it!
[16:27:47] <pfred1> with all that RAM what you need SSDs for?
[16:28:00] <Jymmm> pfred1: for when the UPS dies =)
[16:28:12] <pfred1> yeah my power company they don't run Linux
[16:28:20] <djdelorie> they're not SSDs, they're spinny disks. 2.25 TB of spinny disks.
[16:28:23] <pfred1> I had 95 days of uptime boom power off
[16:28:44] <Jymmm> I have 8TB spinny
[16:29:01] <pfred1> don't all the porn look alike after a while?
[16:29:07] <djdelorie> my server has 14TB spinny, this is my desktop I'm talking about
[16:29:09] <pfred1> 8TB?
[16:29:21] <Jymmm> pfred1: This is QUALITY PR)N, not that stuff djdelorie watches
[16:29:32] <pfred1> yeah I guess it is a higher bitrate
[16:29:43] <Jymmm> pfred1: Yeah, and I'm going for 24TB next round.
[16:29:52] * pfred1 likes the low quality sleezy stuff
[16:30:11] <Jymmm> pfred1: and you wonder why it all looks the same
[16:30:15] <djdelorie> I amost didn't go 24TB but I realized I always ending up wanting more memory, so I just got the max the mobo supported right up front. Worth it!
[16:30:32] <Jymmm> djdelorie: 24TB of RAM????????????????????????????????
[16:30:35] <djdelorie> most of my data is huge software build trees
[16:30:39] <Jymmm> TeraBytes
[16:30:44] <djdelorie> 25 GB of ram, 14 TB of disk, sorry.
[16:30:49] <Jymmm> k
[16:31:02] <pfred1> hmmm fedora
[16:31:03] <djdelorie> er, 24G/2T on the desktop, 8G/14T in the server
[16:31:09] <Jymmm> Shit, I'll take 24TB ram in a heartbeat
[16:31:15] <pfred1> I'll have to see what versions of what they're offering
[16:32:02] <pfred1> I have a vid card on order now but it hasn't arrived yet
[16:32:10] <djdelorie> easiest way: go to koji.fedoraproject.org and search for the package you want to check; it will tell you the latest builds for each os version
[16:32:27] <pfred1> thing is i kind of like older versions of some stuff
[16:32:36] <pfred1> like I don't like the new KDE 4.X
[16:32:43] <pfred1> I love 3.5.10
[16:32:55] <djdelorie> F14 has kde4 and F14 is already "no longer supported"
[16:33:13] <djdelorie> it comes with kde3 too as a compatility library
[16:33:14] <pfred1> yeah i might have to go with an offbeat WM like xfce
[16:33:22] <djdelorie> I use fvwm2 still
[16:33:40] <pfred1> heh yeah I used WindowMaker for a long time its kind of abandonware today though
[16:33:49] <pfred1> my linuxcnc machine i use fluxbox
[16:34:05] <pfred1> check this out the ram stick went bad in it and I was running X with 22 MB RAM
[16:34:23] <pfred1> it wasn't running bad either until I tried to fire up firefox
[16:38:45] <pfred1> http://img87.imageshack.us/img87/2250/wedoct27bootchart.png
[17:01:10] <joe9> pfred1: have you tried xmonad.
[17:01:30] <pfred1> joe9 no what is it?
[17:01:32] <alex4nder> joe9: how's your mill?
[17:01:50] <joe9> i am trying to figure out how to connect the motor to the DB9 connectors. Any schematics that can help me?
[17:02:09] <joe9> alex4nder: wired up the gecko, e-stop switch and psu. they seem to be working fine.
[17:02:26] <joe9> i am about to start soldering the motors to the db-9 connectors.
[17:02:28] <pfred1> gecko has a lot of resources on their website
[17:02:38] <alex4nder> joe9: use the wire color code information you got with your steppers, and then look on the front panel of the G540.. the pinout is listed there.
[17:02:53] <joe9> pfred1: xmonad ~ fvwm2 (a window manager).
[17:03:12] <joe9> alex4nder: ok, thanks.
[17:03:23] <pfred1> I have run fvwm
[17:03:38] <pfred1> and several variants of it
[17:04:17] <pfred1> if fluxbox had some gui config utils I'd be OK with it
[17:04:30] <pfred1> editing the files by hand gets old fast though
[17:05:02] <pfred1> plus i do sort of like desktop shortcuts
[17:05:13] <alex4nder> joe9: also don't forget the resistor.
[17:05:39] <pfred1> joe9 are you good at soldering?
[17:06:37] <pfred1> if I had to solder a DB9 shell I'd get a sacrificial plug to plug it int oso I didn't overheat the plastic
[17:07:27] <jdhnc> not really needed, just don't be slow.
[17:07:48] <pfred1> an ounce of prevention is worth a pound of cure
[17:08:03] <djdelorie> use flux, solder faster :-)
[17:08:16] <pfred1> I bench soldered at a board house
[17:08:23] <pfred1> so I am pretty godo at soldering
[17:08:35] <djdelorie> well, that ruins all your excuses now ;-)
[17:08:37] <jdhnc> and you can't solder a db9 without an aid? :)
[17:08:39] <pfred1> still doesn't hurt to make sure of things
[17:09:02] <pfred1> depends on the quality of the plastic
[17:09:31] <pfred1> I don't think all connectors roll off the same line even if they did hoppers get filled with different pellets
[17:10:41] <pfred1> plus it isn't really me soldering it
[17:11:09] <joe9> pfred1: i am ok with soldering.
[17:11:13] <pfred1> good
[17:12:29] <pfred1> I have barrier strips for all of my connections
[17:13:12] <joe9> i prefer the wire-nut to barrier strips.
[17:13:52] <pfred1> so just pigtails coming off PCBs?
[17:14:13] <pfred1> I'd imagine it'd be hard to keep them straight
[17:15:23] <joe9> pfred1: not for pcb's. just for normal connections.
[17:15:46] <joe9> alex4nder: i have bipolar motors. I can use the "Bipolar (Parallel) connection", correct?
[17:16:09] <joe9> http://www.kelinginc.net/KL23H276-30-8B.pdf&sa=U&ei=0HN7T-rnFvO70AGo2-TzBQ&ved=0CBEQFjAA&usg=AFQjCNHDPwm90IdysPpE32QJqgOusAIG0w is my motor.
[17:16:10] <pfred1> I would
[17:16:34] <pfred1> 8 wire motor?
[17:16:40] <joe9> yes.
[17:16:45] <pfred1> yeah go parallel
[17:16:52] <Tom_itx> soldering 101?
[17:17:23] <pfred1> series is higher torque at lower RPM?
[17:17:37] <pfred1> well parallel is higher current
[17:18:31] <pfred1> parallel will net you the highest torque at higher RPM
[17:18:58] <djdelorie> but needs a bigger power supply, of course.
[17:19:03] <joe9> the gecko spec says: pin 6 = phase B motor wire, pin 7 = Phase /B motor wire, pin 8 = Phase A .. and so on.
[17:19:05] <pfred1> well yeah
[17:19:06] <djdelorie> TANSTAAFL
[17:19:29] <pfred1> but it sucks how steppers can't draw current the faster you run them
[17:19:34] <joe9> the motor spec says "Blue and Yellow to A+"
[17:19:37] <joe9> and, so on.
[17:19:53] <joe9> that would mean pin 8 = Blue + Yellow wires?
[17:20:21] <pfred1> you should have 4 connections A Aprime B and Bprime
[17:20:29] <djdelorie> pfred1: basic electronics. The higher the frequency you put through an inductor, the more of a resistor it becomes, and thus reduces available power
[17:20:45] <pfred1> djdelorie I thought it had to do with dumping the flux
[17:20:56] <pfred1> you just keep on reducing your dwell time
[17:21:01] <pfred1> the faster you run
[17:21:13] <djdelorie> that's why max RPM is tied to the voltage, not the current - more voltage means you can change the current, and thus flux, faster.
[17:21:20] <joe9> pfred1: all 8 wires of the motor go only to 4 pins of the DB-9 connector.
[17:21:35] <pfred1> joe9 you're going to use all 8 wires 4 pairs
[17:21:47] <joe9> 1 and 5 pins is just the current set resistor.. and the other pins are NC
[17:22:10] <pfred1> djdelorie yeah I only run 24V
[17:22:21] <joe9> pfred1: yes, 4 pairs, and 1 pair to 1 pin.
[17:22:32] <pfred1> I love my TB6560AHQs though
[17:22:35] <joe9> i have a 48V psu.
[17:22:49] <joe9> pfred1: 1 pair to 1 pin, correct?
[17:22:58] <pfred1> joe9 yes
[17:23:06] <joe9> pfred1: thanks.
[17:23:20] <Tom_itx> pfred1, would the heat off the steppers increase alot going from 24 to 48v?
[17:23:21] <pfred1> yeah pralallel is way better than series
[17:23:33] <pfred1> Tom_itx it shouldn't same current
[17:23:38] <Tom_itx> hmm
[17:23:43] <Tom_itx> just better response?
[17:23:44] <joe9> and, according to the terminology, /B == B- ?
[17:23:52] <Tom_itx> maybe i should finish my psu
[17:24:11] <pfred1> that is the beauty of PWM choppers
[17:24:29] <Tom_itx> i still need to get those too
[17:24:41] <Tom_itx> i have the original ones but i have no specs on them
[17:24:48] <djdelorie> Tom: on my controllers, voltage is used only to change current, it's current that's managed. More voltage only means I can change the current faster, max current is still limited to the same value
[17:25:02] <Tom_itx> djdelorie, that's my take on it
[17:25:12] <Tom_itx> just double checking
[17:25:18] <pfred1> djdelorie yeah but my motor drivers only cost $10 a piece :)
[17:25:33] <Tom_itx> so would i expect a decent performance increase?
[17:25:38] <djdelorie> Even a 24v supply on my motors can max out the current, if they're moving slow enough. At 60V I'm limited to about 1500 RPM, at 120V it's closer to 3,000 RPM, etc.
[17:25:53] <Tom_itx> going from a 24v ~3A supply to a 45v 18A one?
[17:25:55] <djdelorie> even cheap controllers should do current limiting, though.
[17:26:01] <pfred1> I can crack 2,600 RPM at 24V
[17:26:21] <pfred1> but I only have usable torque to 800
[17:26:54] <pfred1> that is the rub with steppers
[17:26:55] <djdelorie> yeah, the big advantage to servos is I get max torque all the way up to 3,000 RPM before it starts significantly dropping off
[17:27:04] <joe9> alex4nder: wondering if you found it easy to solder the resistor first and then the wires?
[17:27:12] <pfred1> yup steppers max torque stopped servos max torque max speed
[17:27:19] <joe9> alex4nder: or, if you just did the wires first and then the resistors.
[17:27:33] <djdelorie> pfred1: er, I can max torque at near-stopped too
[17:27:50] <Tom_itx> they cost more than steppers too
[17:28:02] <pfred1> djdelorie it isn't very useful though
[17:28:17] <pfred1> hold unless you have ballscrews is eh
[17:28:33] <pfred1> acme holds pretty good all by itself
[17:28:46] <djdelorie> yeah, they're expensive. Right, no torque if you're not moving :-) but when they're holding position, I need a pipe wrench to move them even a tiny bit
[17:29:32] <pfred1> djdelorie your drivers are really nice but I think you're going to find lead screw limitations
[17:29:35] <djdelorie> specs say 340 oz-in up to 2500 RPM, then it drops linearly to zero at 5,000 RPM
[17:29:41] <djdelorie> well YEAH
[17:29:51] <joe9> my stepper motors has a current/phase of 2.1 A in series and 4.2A in parallel.
[17:30:11] <pfred1> joe9 thats nice what ohms and uH are they?
[17:30:19] <joe9> the gecko g540 spec says that anything over 3.5A, will lose some power.
[17:30:21] <djdelorie> top speed at the moment seems to be limited by how fast the screws can turn before they start resonating
[17:30:35] <joe9> or, will not be working at the maximum efficiency.
[17:30:42] <djdelorie> 3.5A through parallel is still more torque than 2.1A through series
[17:30:47] <pfred1> djdelorie yes you need fixed 2 ends for max lead speed
[17:30:58] <djdelorie> hmm, or is it? maybe not
[17:31:07] <pfred1> djdelorie I found out something interesting putting bearings on my leads too
[17:31:20] <joe9> series: resistance/phase = 1.84 Ohms, Inductance/Phase = 8.8mH, Holding torque = 282 Oz-In
[17:31:26] <pfred1> don't get bearings that fit right on your threaded rod
[17:31:34] <djdelorie> I have bearings on both ends. It's the sections between the bearings and the nut that go harmonic on me
[17:31:37] <pfred1> get sleeves that fit then bearings that fit over your sleeves
[17:31:37] <joe9> parallel: resistance/phase = 0.46 Ohms, Inductance/Phase = 2.2mH, Holding torque = 282 Oz-In
[17:31:48] <pfred1> because threads have pitch
[17:32:10] <pfred1> something I didn't take into account
[17:32:16] <djdelorie> the rods have milled ends with matched bearings, no problem.
[17:32:21] <joe9> pfred1: in this situation (with these motors), is it better to use bipolar series instead?
[17:32:28] <pfred1> means bearings that fit right on your threaded rod won't be axial with it
[17:32:56] <pfred1> joe9 parallel always better than series
[17:33:05] <djdelorie> what I need is larger diameter screws
[17:33:09] <joe9> oh, ok, thanks.
[17:33:16] <djdelorie> pfred1: in this case, is that true?
[17:33:17] <pfred1> djdelorie you need multistart
[17:33:27] <djdelorie> pfred1: Y is four-start
[17:33:39] <pfred1> it runs fast too right?
[17:33:52] <pfred1> without the rod going berserk
[17:33:55] <djdelorie> the screw has a max RPM because of its diameter and length
[17:34:20] <djdelorie> it's 2 revs per inch, that moves plenty fast. X is the slow one; it's 10 turns per inch
[17:34:22] <pfred1> or just run timing belts
[17:34:35] <pfred1> I'm telling you we don't need the resolution that threads give
[17:34:58] <pfred1> shopbots use racks and pinions
[17:35:25] <pfred1> serpentime timing belts poor man's way though
[17:35:26] <djdelorie> it's what we had available, it's all surplus
[17:36:03] <pfred1> djdelorie what size bed is your machine?
[17:36:12] <djdelorie> but X is a thicker screw, it can handle the RPMs. That's the one I need to configure the steps/rot down to speed it up.
[17:36:23] <djdelorie> working area is about 24x30 inches
[17:36:51] <pfred1> oh you won't even hit full acceleration
[17:36:55] <djdelorie> next one will be bigger and probably belt driven
[17:37:26] <pfred1> something you can get a 4x8 sheet into seems ideal
[17:37:34] <djdelorie> exactly :-)
[17:37:45] <djdelorie> "and folds for easy storage" :-)
[17:37:48] <pfred1> though my plan is to have a machine i can put on a sheet
[17:38:25] <djdelorie> it was suggested I got for a vertical bed - 8ft long, 4ft high, 1ft thick. But the parts tend to fall off once they're cut
[17:38:57] <pfred1> it is too bad les watts doesn't still hang out here
[17:39:04] <pfred1> he has a sweet machine
[17:39:21] <pfred1> he's a total kook
[17:40:06] <pfred1> aww he sold his domain and everything
[17:41:15] <pfred1> I think i may have archived his stuff someplace
[17:41:32] * pfred1 doesn't trust the Internet ...
[17:44:11] <djdelorie> www.archive.org ?
[17:46:20] <pfred1> seemingly not
[17:46:47] <pfred1> he had a woodworking company and made these religious plaques
[17:47:01] <pfred1> not that he was religious mind you they were just good sellers
[17:47:25] <pfred1> but he wasn't messing around when it came to performance
[17:47:51] <pfred1> I have to say the machine he built looked like he bought it
[17:47:58] <djdelorie> in business, time is money
[17:48:22] <pfred1> last i saw him he was complaining he was getting tired of rebuilding PC routers
[17:48:35] <pfred1> he'd burn the bearings up in them
[17:48:46] <djdelorie> in a cnc machine?
[17:48:50] <pfred1> yup
[17:49:03] <pfred1> routers really aren't built to run all day
[17:49:21] <pfred1> not even $300 ones
[17:49:33] <djdelorie> wonder why he didn't switch to a real spindle
[17:49:47] <pfred1> that was what he was in the process of doing
[17:50:00] <pfred1> then he went back into industry
[17:50:12] <pfred1> he designed spray guns
[17:50:29] <pfred1> like for Binks and Devilbiss
[17:51:05] <pfred1> which today is the same company i believe
[17:51:35] <pfred1> though I'm not sure if that is what he got back into doing
[17:52:17] <pfred1> he knew his mechanics that is for sure
[17:52:46] <pfred1> he had this crazy anti backlash thing he made
[17:53:20] <pfred1> and he had his lead screws preloaded
[17:53:36] <pfred1> to run them really fast you have to do that
[17:54:36] <pfred1> heck he would always go on and on about how he had his lead screws error mapped
[17:54:48] <alex4nder> joe9: I bought DB9 PCBs with built-in potentiometers from soigeneris
[17:55:17] <alex4nder> but if you've got a 1/4 watt carbon resistor, I'd solder the wires first.
[17:55:45] <pfred1> small parts first then big ones
[17:56:27] <pfred1> usually works best for me
[17:56:45] <alex4nder> I think the wires qualify as the smaller part, when soldering to a d-sub connector
[17:57:24] <pfred1> alex4nder short wires then :)
[17:57:56] <alex4nder> no, they're just a pain in the ass to solder
[17:57:57] <pfred1> man i am loving this PC I need to install an OS to it
[17:58:23] <pfred1> I use angled work tweesers to solder wires to connection rows
[17:58:36] <pfred1> everything tinned it goes quickly
[17:59:16] <Thetawaves> if anybody is looking for an 'industrial' avr board, hit me up
[17:59:44] <alex4nder> pfred1: how much do you charge? maybe joe9 should send his steppers to you
[18:00:43] <pfred1> alex4nder a beer an hour
[18:01:01] <alex4nder> shit, that's cheap
[18:01:14] <pfred1> you didn't ask me what beers I like
[18:01:36] <alex4nder> ...
[18:02:31] <pfred1> alex4nder this is my workbench
http://www.instructables.com/id/Pauls-Electronics-Pit/
[18:03:02] <alex4nder> what, no x-ray or stereo microscope
[18:03:20] <Tom_itx> that's entirely too friggin neat
[18:03:31] * Thetawaves should post pictures
[18:03:34] <pfred1> heh I only use bigger parts I used to have to do SMT at an old job so I refuse to do it today
[18:03:37] <djdelorie> half my office is electronics workbench, but I think you have more usable space on yours...
[18:04:07] <pfred1> I have a magnifying glass on an arm
[18:04:27] <Tom_itx> me too
[18:04:35] <Tom_itx> i use it for a lamp for my binocular scope
[18:04:47] <djdelorie> I use an OptiVisor, but I *also* have a lighted magnifier on an arm. Both have weak lenses, so I can use them together for really good close-ups
[18:05:14] <pfred1> djdelorie I wear reading glasses for anything close today old age
[18:05:33] <djdelorie> my optivisor is getting closer to reading glasses every day :-P
[18:05:40] <pfred1> yuppers
[18:05:59] <pfred1> its funny i think I can see but I really can't
[18:06:15] <pfred1> like try to read the date on a dime
[18:07:12] <pfred1> I used to be able to but those days are gone now
[18:08:29] <pfred1> I need another USB key
[18:08:50] <pfred1> well, I have another one but it has some data on it
[18:11:44] <pfred1> you might have run Debian too long when you issue the command sudo apt-get install food when you're hungry
[18:12:00] <JT-Shop> lol
[18:13:10] * JT-Shop needs a sand blaster cabinet
[18:13:30] <pfred1> no. you need a media blaster cabinet
[18:13:42] <JT-Shop> ok, talk to me then
[18:13:52] <pfred1> sand blasting is what yo udo when you drive in Daytona
[18:13:52] <JT-Shop> glass beads?
[18:13:59] <JT-Shop> LOL
[18:14:06] <JT-Shop> or west texas
[18:14:07] <alex4nder> depends on what you're blasting
[18:14:14] <JT-Shop> steel usually
[18:14:37] <JT-Shop> mill scale usually
[18:14:52] <pfred1> I thought that was removed by pickling?
[18:15:13] <JT-Shop> could be but what a mess
[18:15:41] <pfred1> when I worked in a machine shop we used to just degrease the bar stock
[18:16:15] <pfred1> I had a spray bottle of some crap spritz it on and wipe it off with a shop cloth
[18:16:40] <pfred1> we sent everything out to be heat treated though
[18:18:15] <pfred1> you use hot rolled?
[18:18:31] <pfred1> CRS is a lot cleaner
[18:19:26] <pfred1> come to think about it we might have used CRS
[18:20:04] <pfred1> it was still scaly as I can recall
[18:20:46] <pfred1> that break down band saw they had still blows my mind
[18:21:19] <pfred1> it sawed through the bar stock like it was pine
[18:21:46] <pfred1> I mean if I'd never seen it I'd never have believed it
[18:22:11] <JT-Shop> I use both hot roll and cold roll
[18:22:25] <pfred1> cold is more internally stressed
[18:22:31] <JT-Shop> yea
[18:23:00] <JT-Shop> blasting will give a more uniform surface after sanding etc and a better grip for painting
[18:24:12] <pfred1> maybe when our parts got sent out they were surfaced when they came back they did look good black oxide finished mostly
[18:24:57] <pfred1> for what we charged they'd better look good
[18:25:38] <pfred1> I should have lifted a lot more stuff from there
[18:25:55] * pfred1 was too young and honest back then ...
[18:27:08] <JT-Shop> lol
[18:27:30] <pfred1> oh come on we had bins with thousands of the stuff who was going to miss a few?
[18:28:00] <JT-Shop> Johnny Cash wrote a song about that
[18:28:15] <pfred1> plus the place was a total scam anyways
[18:28:46] <JT-Shop> when I worked in the ship yard I would pick up fastners off of the floor... I have quite a collection of SS nuts and bolts from that part of my life
[18:28:51] <pfred1> back then we were buying chinese centers and rebuilding them then selling them like we made them
[18:29:01] <JT-Shop> centers?
[18:29:07] <pfred1> lathe centers
[18:29:14] <JT-Shop> ah
[18:29:20] <pfred1> we'd make the big custome ones but not the regular sizes
[18:29:37] <JT-Shop> so some nut wants to use his ipad to control his cnc machine on the forum
[18:29:43] <pfred1> they were getting them off harbor freight
[18:29:53] <JT-Shop> what a place that is
[18:30:21] <pfred1> randy would take them apart and put them back together again he basically did QC and that was it
[18:32:14] <pfred1> that whole shop was an anachronism just kept going for the old man the diamond business kept it going
[18:32:43] <pfred1> we were there as fixtures decoraitons
[18:33:35] <djdelorie> I saw a TV show about a store that was so big, it had a machine shop with a full time staff just to keep the animatronic displays working
[18:34:05] <pfred1> this shop in its hey day had 40 machinists when I was there there were 7 of us
[18:34:17] <pfred1> they had machine rooms no one even went into anymore
[18:34:46] <pfred1> one day the foreman took me into one of them just to show me around
[18:35:08] <pfred1> wall to wall idle machines
[18:36:00] <pfred1> I think he expected me to pick out a few to take home or something
[18:36:07] <djdelorie> AND? AND?
[18:36:14] <pfred1> well it didn't dawn on me then
[18:36:44] <pfred1> but those machines were never going to ever do anything again
[18:36:58] <pfred1> no one would have missed any of them if they were gone
[18:37:28] <pfred1> it was a bizarre place
[18:37:43] <pfred1> and the son what a total scumbag he was
[18:38:27] <pfred1> he'd come in on Monday morning bragging how he burned 300 gallons of gas in his boat going up the lake and back
[18:38:39] <JT-Shop> the son?
[18:39:03] <pfred1> yeah see the old man Henry he was 84 his son was no youngster either he kind of "ran" the company
[18:39:11] <pfred1> more like ran it into the ground
[18:39:44] <pfred1> henry didn't know where he was half the time I mean the guy was 84
[18:40:09] <pfred1> he'd still load vises onto mill tables though
[18:40:26] <pfred1> one day I saw him doing it I ran over i was like Henry let me give you a hand with that
[18:40:54] <WCMD> hey everybody!
[18:40:55] <pfred1> I mean like a 150 pound milling vise
[18:41:10] <pfred1> hey!
[18:41:19] * djdelorie has an engine hoist in his basement for stuff like that
[18:41:32] <pfred1> djdelorie old Henry was old school
[18:41:49] <pfred1> when the guy got a metal splinter he'd grind it out
[18:41:51] <Tom_itx> yeah you young whipper snapper
[18:41:57] <djdelorie> for the really big stuff, I have friends...
http://www.delorie.com/photos/southbend-lathe/img_2418.html
[18:43:09] <djdelorie> Best comment from him: "that thing weighs more than you think..." - his excavator had a hard time picking it up
[18:43:38] <pfred1> it looks like a small one
[18:43:49] <djdelorie> excavator? Yeah.
[18:44:10] <WCMD> does anyone know if this parallel card will work with linuxCNC?
http://www.newegg.com/Product/Product.aspx?Item=N82E16815158303
[18:44:29] <pfred1> that was what I did when I left machine work I went into construction
[18:44:49] <pfred1> WCMD the rosewill is really nice
[18:45:16] <djdelorie> he did like the fact that my bulkhead has removable stairs, though... picked them up, set them on the lawn, dropped the lathe in onto the dolly...
[18:45:58] <WCMD> pfred1 im looking for one without the back panel
[18:46:16] <pfred1> WCMD how will it fit a case?
[18:46:20] <djdelorie> er, no dolly, that was the other item, the lathe went onto the floor until we picked it up with the hoist
[18:47:15] <JT-Shop> there is a FAQ on parallel port cards on the Forum
[18:47:20] <pfred1> plus the card ends are just riveted on anyways i guess they all come off i modified a vid card here once
[18:47:50] <pfred1> JT-Shop someone here bought a couple before I bought mine they said the rosewill looked nicer so it is the one i got and it does seem like a nice card to me
[18:48:01] <djdelorie> hey look! there's a forum too! ;-)
[18:48:16] <Tom_itx> JT-Shop, does you iphone have an app for linuxcnc yet :)
[18:48:25] <pfred1> but yeah the ysay which chip to get
[18:48:29] <Tom_itx> noticed the forum comment...
[18:48:32] <JT-Shop> Tom_itx, no
[18:48:59] <pfred1> OK time to boot linuxcnc on this box
[18:49:06] <WCMD> +g(pfred1) internally
[18:49:13] <WCMD> how do you send a private message
[18:49:18] <pfred1> /msg
[18:49:33] <KimK> Pardon me for just a moment, gents:
[18:49:39] <KimK> For those who are interested in downloading the new ISO (not needed just to upgrade) a torrent link is available here:
http://linuxtracker.org/index.php?page=torrent-details&id=58c3d84f5124725969bbbc24b1c8cad291ebbcb4 Please remember to help seed after you have downloaded. Thanks!
[18:49:52] <KimK> Thanks gents, please continue!
[18:50:00] <WCMD> Thank you!
[18:50:08] * pfred1 has the iso in his hot little hands ...
[18:50:31] <pfred1> it's in the drive!
[18:51:18] <pfred1> hmmm Ubuntu 8.04 I thought I had a newer one?
[18:52:12] <pfred1> I guess i should get the latest and try it out huh?
[18:52:51] <djdelorie> KimK: no peers yet ?
[18:53:39] <djdelorie> there's one!
[18:55:28] <pfred1> how come we don't have a torrent option for the iso image?
[18:56:39] <pfred1> that is usually my preferred method for snagging isos anymore I hate to be a drain on one server
[18:57:41] <djdelorie> KimK: is it the same file as the iso on the download page? it would be much faster for me to download, *then* start torrent, to help seed...
[18:58:40] <pfred1> KimK I'll do that on my other box so I can seed
[19:00:05] <pfred1> would someone be so kind as to paste that torrent link again?
[19:00:15] <djdelorie> http://linuxtracker.org/index.php?page=torrent-details&id=58c3d84f5124725969bbbc24b1c8cad291ebbcb4
[19:00:18] <pfred1> ta
[19:00:23] <KimK> djdelorie: Yes, same file, thanks, others have done that to help
[19:00:53] <KimK> pfred1: Thanks, all seeding help appreciated
[19:01:36] <pfred1> KimK I have a 217 share for mplayer's essentials file :)
[19:01:58] <Valen> what is tihs iso for?
[19:02:14] <pfred1> the latest linuxcnc
[19:02:16] <Tom_itx> 2.5 i believe
[19:02:21] <Valen> ahh
[19:02:27] <Valen> not using 12.04? ;->
[19:02:27] <pfred1> well latest iso
[19:02:41] * Valen ducks and runs off
[19:02:56] <pfred1> I just want to see what that system is like if i like it I'll do a custom build but i want to know today not next week
[19:03:49] <Valen> what 12.04 is like?
[19:04:08] <pfred1> Valen I donno i was just running 11.10 live and hating it
[19:04:18] <Valen> yeah unity is pretty crap
[19:04:22] <KimK> Valen: You're running 12.04? Just sim? What kernel?
[19:04:30] <mozmck> heh, I don't much like unity or gnome3
[19:04:36] <pfred1> Valen I had to google how to bring up a terminal
[19:04:37] <Valen> no, i'm not running anything like that lol
[19:04:47] <Valen> i had to google how to turn my damn computer off
[19:04:57] <pfred1> that i figured out
[19:05:05] <Valen> i might be thinking 11.04
[19:05:14] <pfred1> but I felt like such a goof having to look up how to get a terminal
[19:05:31] <Valen> you had to hold shift to get a shutdown option when clicking on the power icon
[19:05:37] <djdelorie> when my wife got her new smart phone, about a week later she came to me and asked "how do I make a phone call on this thing?"
[19:05:42] <Valen> sorry clicking on your name
[19:05:52] <djdelorie> I though that was a dumb question until I realized they didn't put a dialer button on the main screen
[19:06:06] <mozmck> If you haven't looked at xfce (xubuntu) lately it's pretty good now.
[19:06:08] <Valen> to be fair, making phone calls is what i use my phone for least ;->
[19:06:22] <Valen> thing is i use gvfs a whole bunch
[19:06:26] <pfred1> djdelorie the big mistake it to think there is any logic to technology it is all made by people
[19:06:33] <JT-Shop> http://www.youtube.com/watch?v=7IpEnsdXwFM
[19:06:45] <djdelorie> well, it did take her a *week* to realize there was no dial button
[19:07:47] <Valen> 12.04 beta was kinda ok
[19:08:04] <Valen> but i haven't tried it on my dual monitor setup yet
[19:08:11] <Valen> I also dislike the all in one bar
[19:08:27] <pfred1> Valen I think the video card I'm getting can do that
[19:08:39] <Valen> having to learn every applications way of opening multiple monitors sucks
[19:09:03] <pfred1> JT-Shop I like how Dean is smoking a filtered cigarette
[19:09:30] <JT-Shop> it is a classic for sure
[19:09:38] <JT-Shop> with a few mistakes
[19:10:01] <pfred1> JT-Shop he smoked the prop one on an earlier take then just grabbed one out of his case
[19:10:50] * JT-Shop wanders inside
[19:14:01] <djdelorie> when linuxcnc is managing a servo motor by reading the encoder, does the speed signal have to be analog? Can the pc send the speed information digitally to the controller, like serial or spi ?
[19:14:42] <pfred1> I'm no expert but I thought it was a -10-+10V signal?
[19:15:25] <djdelorie> it starts off digital in the pc *somewhere* I just figured a digital link would be more noise-immune, and no need for a big zero gap or anyything
[19:15:49] <PCW> anyway that works ...
[19:15:51] <PCW> ...
[19:15:53] <pfred1> djdelorie you are right about that
[19:16:05] <pfred1> it has to be digital somewhere
[19:16:36] <pfred1> come to think about it how cna the PC output a -10-10V signal?
[19:16:40] <PCW> we use analog, SPI, serial, (working on Ethernet ATM)
[19:16:54] <PCW> also PWM
[19:16:54] <djdelorie> CAN ? ;-)
[19:16:56] <pfred1> ah Mr. Mesa is here
[19:17:40] <PCW> can should work but may be a bit slow for multidrop
[19:18:11] <alex4nder> djdelorie: the feasibility of CAN depends a lot on the chip you're using on the host to send out frames.
[19:18:19] <PCW> isn't CAN 1 Mbps
[19:18:35] <alex4nder> yes, at "maximum" speed
[19:18:55] <djdelorie> let's assume max speed then :-)
[19:19:03] <alex4nder> the problem with CAN is that your "MTU" is 8 bytes
[19:19:16] <djdelorie> that's a huge number of bits to send out an RPM request
[19:19:49] <djdelorie> but at least CAN is more deterministic and uses a differential pair
[19:20:05] <djdelorie> (and my controllers already have a CAN interface ;)
[19:20:26] <alex4nder> well determinism is going to be limited by your interrupt handlers preemption and ability to service frames
[19:20:36] <alex4nder> easy on the embedded side, kind of lame on the PC side
[19:20:44] <djdelorie> yeah, I was referring to its collision management system
[19:20:48] <Valen> djdelorie: we use mesa stuff and have a fully digital servo loop
[19:20:52] <PCW> if you run it like the stepgen you would out velocity requests and echo position (and Linux CNC runs the position PID loop)
[19:20:59] <alex4nder> djdelorie: yah, the collision thankfully is a done deal
[19:21:08] <PCW> s/out/output/
[19:21:16] <djdelorie> I figured, send out RPM requests on the can bus, get encoder signals back separately
[19:21:25] <alex4nder> djdelorie: one of my contracting gigs is CAN driver maintainer for the world's largest autoparts maker
[19:21:44] <Valen> your only after ~1khz rate
[19:21:45] <alex4nder> so I deal with the pain of CAN frame performance on a regular basis.
[19:21:55] <djdelorie> the MCUs I use come from Renesas, they mostly sell to the Japanese car market. Most of their MCUs have built-in CAN
[19:22:10] <pfred1> alex4nder so it is safe to say that your job is a pain in the CAN?
[19:22:15] <alex4nder> ouch
[19:22:16] <Valen> just distribute a clock, have everything sample at that time, then phone in the results
[19:22:38] <alex4nder> djdelorie: at the rates you're talking about, even an SJA1000 would be fine.
[19:22:45] <PCW> 1 KHz is fine (unless you have something exotic like linear motors)
[19:22:59] <djdelorie> when I was considering CAN, I figured you'd send out the next step in the path as a series of can packets, then one "start now" packet so they're synchronized
[19:23:31] <alex4nder> right.
[19:23:37] <Valen> when i had the dual Xeon system with 2000 latency i ran the servo loop at 10khz
[19:23:43] <Valen> just because i could lol
[19:23:46] <PCW> if Linux CNC runs the torque loop then 4 KHz or so would be better
[19:24:07] <PCW> (also for bare Hbridges)
[19:25:46] <Valen> better than 10?
[19:25:51] <djdelorie> my controllers run a 20 KHz loop
[19:26:21] <djdelorie> "because they can" :-)
[19:26:24] <PCW> But really only the current loop needs that kind of speed
[19:26:25] <pfred1> djdelorie you might want to investigate liquid nitrogen system cooling
[19:26:40] <ReadError> hey yall :)
[19:26:45] <djdelorie> nah, these things have so much hardware assist there's plenty of performance left over
[19:26:50] <ReadError> gecko one of the better off the shelf controllers?
[19:27:04] <djdelorie> that seems to be the general consensus
[19:27:05] <pfred1> ReadError people with them seem happy
[19:27:12] <alex4nder> ReadError: they're good
[19:27:30] <ReadError> is there a decent USB -> parallel solution?
[19:27:34] <alex4nder> no
[19:27:35] <pfred1> mariss does a great job too
[19:27:36] <Valen> no
[19:27:39] <ReadError> PPT is a dieing breed ;(
[19:27:39] <djdelorie> pfred1: although the inverter chips have heatsinks on them, and their temperature is monitored. Hasn't hit the estop threshold yet though
[19:27:43] <alex4nder> ReadError: don't even bother.
[19:28:03] <PCW> There are PCIE PPTs
[19:28:12] <ReadError> oh really
[19:28:14] <djdelorie> the inverter chips have an app note on how to properly cool them, from small heat sinks like mine to large air and water cooled monsters
[19:28:20] <pfred1> djdelorie thing is Valen said his dual zeon had a 2000 latency and he was happy with 10 KHz
[19:28:25] <ReadError> seems like they would have come up with a better solution
[19:28:26] <pfred1> 2000 latency is flying
[19:28:35] <ReadError> after all, may new mobos dont even come with serial anymore
[19:28:37] <jdhnc> solution to what?
[19:29:01] <djdelorie> Valen: how fast were your motors moving with that setup?
[19:29:01] <ReadError> interfacing computers to controllers
[19:29:09] <alex4nder> ReadError: unless you move the closed-loop offboard, you're stuck using systems with determinism and load latency (e.g. parallel)
[19:29:12] <Valen> not that fast
[19:29:17] <djdelorie> 2000 latency is, what, 500 KHz ?
[19:29:26] <ReadError> i just ordered my 1st mill
[19:29:30] <ReadError> im super excited ;)
[19:29:39] <ReadError> its CNC ready so i need the motors and controller
[19:29:43] <Valen> i am using linear scales for the feedback so my loop control is actually kinda crap
[19:29:48] <pfred1> djdelorie right now atoms are a hot setup and they're around 5000 latency
[19:30:02] <Valen> when lightning took away my xeons i got an atom
[19:30:06] <Valen> they are great
[19:30:12] <Valen> (and a touch quieter lol)
[19:30:15] <djdelorie> Mine is 800 MHz P3, it's 20000 latency. I need to dig out a better box from the pile
[19:30:16] <ReadError> pfred1: whats a good atom mobo with known compatability?
[19:30:22] <ReadError> a nice small PC would be nice for the shop
[19:30:27] <ReadError> all my boards are full size ATX
[19:30:29] <Valen> it was an old school dual socket (not dual core) p4 xeon
[19:30:38] <pfred1> ReadError ask Valen
[19:30:42] <ReadError> something without fans would be nice too ;)
[19:30:50] <jdhnc> I got an intel dm525 board, seems to work well and only $75
[19:30:50] <Valen> the intel ones i think people use
[19:31:01] <Valen> i think thats what we have
[19:31:04] <PCW> and has a PP!
[19:31:06] <Valen> check the latency page in the wiki
[19:31:17] <jdhnc> has a PP and a PCI slot
[19:31:22] <Valen> beware though, there is sorta kinda an issue with some atoms and the pp
[19:31:25] <pfred1> I want to get an AMD system they seem to do well
[19:31:29] <jdhnc> and is tiny and quiet.
[19:31:39] <djdelorie> you won't hear the fans over the sound of the mill anyway :-)
[19:31:45] <pfred1> heh
[19:31:55] <Valen> the fan is normally on the chipset not the cpu anyway
[19:31:59] <alex4nder> pfred1: latency on my AMD was really bad
[19:32:02] <djdelorie> KimK: download done, seeding
[19:32:14] <ReadError> http://www.newegg.com/Product/Product.aspx?Item=N82E16813121442
[19:32:16] <ReadError> oooo gusta
[19:32:32] <PCW> the BIOS is broken on the d510/d525 so the PP is not reported right but LinuxCNC past 2.43 has a workaround
[19:32:41] <ReadError> i would never buy AMD anymore
[19:32:47] <ReadError> intel has been the best for many years
[19:32:56] <alex4nder> ReadError: that depends on what the best is
[19:32:56] <ReadError> last decent CPU AMD had was the athlon xp
[19:33:11] <alex4nder> my Phenom II setup builds kernels faster than my i7 setup
[19:33:12] <pfred1> ReadError they are changing directions
[19:33:17] <ReadError> alex4nder: performance per $
[19:33:24] <alex4nder> ReadError: depends on what you're doing.
[19:33:29] <ReadError> pfred1: well their only hope is ATI cards now ;/
[19:33:31] <PCW> supposedly the Hudsons (at least some) have decent latency
[19:33:40] <ReadError> the 2500K blows most AMD cpus out of the water
[19:33:42] <alex4nder> ReadError: my core i7s play starcraft 2 better, my AMDs move data around better.
[19:33:43] <ReadError> for 179$
[19:33:48] <pfred1> ReadError I've had issues with ATI in Linux
[19:33:48] <alex4nder> haha
[19:33:51] <ReadError> yea, intel for gaming for sure
[19:33:56] <ReadError> pfred1: yea
[19:34:02] <ReadError> ATI has _ALWAYS_ sucked on linux
[19:34:10] <pfred1> I got the darned thing to accelerate once and that was it
[19:34:10] <alex4nder> ReadError: again, it depends on what you're doing.. my 2600K is slower than my Phenom II 1055T for server and development tasks.
[19:34:12] <ReadError> remember the weather channel was doing that graphics driver project?
[19:34:22] <ReadError> this was many years ago
[19:34:57] <Jymmm> SWPadnos: ping
[19:35:07] <pfred1> well I have a nvidia on order
[19:35:23] <pfred1> for my dollar box
[19:36:57] <pfred1> I think that is what I'm going to name that system dollar
[19:38:09] <ReadError> last box i built runs vmware esxi
[19:38:12] <ReadError> handles all my needs :)
[19:39:16] <Jymmm> virtual pr0n huh?
[19:39:32] <pfred1> yea! my cheesewhiz gfx card finally shipped
http://www.amazon.com/dp/B005JZQWEO/ref=pe_175190_21431760_cs_sce_dp_1
[19:39:45] <ReadError> if by virtual porn you mean virtual gusta
[19:39:47] <ReadError> then yes :)
[19:39:52] <ReadError> has a SSD
[19:39:54] <ReadError> 2600K
[19:39:58] <ReadError> runs like a dream
[19:40:03] <Jymmm> Uh, no.
[19:40:56] <ReadError> anyone here played with a taig mill?
[19:41:02] <alex4nder> yes
[19:41:03] <pfred1> Show respect for age. Drink good Scotch for a change.
[19:41:08] <ReadError> they ok alex4nder?
[19:41:11] <alex4nder> yup
[19:41:11] <ReadError> its my 1st one
[19:41:19] <alex4nder> mine runs LinuxCNC, with steppers
[19:41:21] <ReadError> it was torn between it, and a sherline
[19:41:26] <ReadError> i got the taig 2019
[19:41:28] <alex4nder> Taig was the right choice.
[19:41:30] <ReadError> probably their low end model
[19:41:36] <ReadError> compared to the others they make
[19:41:36] <pfred1> get a sieg X3
[19:41:46] <alex4nder> ReadError: you bought the ER CR right?
[19:41:50] <ReadError> yessir
[19:41:56] <alex4nder> that's as good as they make
[19:42:05] <ReadError> so i can fiddle until i get the motors/controller
[19:42:18] <alex4nder> that's what I did
[19:42:27] <ReadError> http://www.amazon.com/VCS-Hobbies-TAIG-2019CR-Micro/dp/B007Q3P1CG/ref=sr_1_1?ie=UTF8&qid=1333499552&sr=8-1
[19:42:29] <ReadError> got that one there
[19:42:31] <pfred1> you could run Tb6550s on a taig couldn't you?
[19:42:33] <ReadError> i hope its the right one
[19:42:55] <alex4nder> ReadError: did you buy it with manual handles?
[19:42:56] <ReadError> the price is higher than some sites but the shipping is much cheaper
[19:42:58] <ReadError> so its about the same
[19:43:04] <ReadError> it comes with them i think (hope)
[19:43:13] <alex4nder> usually it doesn't
[19:43:18] <pfred1> ReadError total cost is the only price that matters
[19:43:20] <alex4nder> i had to order mine especially with them, and paid extra.
[19:43:24] <ReadError> adjustable brass gibs
[19:43:27] <ReadError> is that them?
[19:43:28] <alex4nder> no
[19:43:30] <ReadError> dang shucks
[19:43:33] <ReadError> i need to order some then
[19:43:38] <alex4nder> they're cheap to order, if it doesn't come with them, call taig
[19:43:46] <ReadError> what are they called?
[19:43:49] <alex4nder> handles
[19:43:49] <ReadError> maybe amazon prime has em
[19:43:52] <alex4nder> no
[19:43:53] <alex4nder> haha
[19:44:21] <alex4nder> the fact anyone is selling a taig on amazon is funny
[19:44:40] <pfred1> amazon sells everything
[19:44:41] <ReadError> they have good reviews
[19:44:47] <ReadError> and amazon prime rocks ;)
[19:44:48] <djdelorie> selling a taig THROUGH amazon is more like it
[19:44:55] <ReadError> even though amazon doesnt sell it ;(
[19:45:05] <ReadError> well crap, i cant find them on amazon
[19:45:12] <ReadError> will any handles work?
[19:45:16] <alex4nder> no
[19:45:17] <ReadError> or is there a certain size
[19:45:23] <pfred1> can a taig mill steel?
[19:45:24] <alex4nder> order them from taig
[19:45:26] <alex4nder> pfred1: yes
[19:45:43] <alex4nder> I just milled some steel brackets for a motorcycle with mine
[19:45:45] <pfred1> alex4nder my RF-32 struggles and it weighs a bit more
[19:46:26] <alex4nder> pfred1: not a problem, just don't try to drive a 3/8" endmill straight into steel with a DoC of 1/8"
[19:46:41] <alex4nder> well, you can try
[19:46:44] <alex4nder> but you won't be happy
[19:46:54] <ReadError> well they havnt shipped yet
[19:46:54] * djdelorie wonders what metals my cnc can cut...
[19:46:58] <ReadError> i can maybe get them added
[19:47:04] <pfred1> I have a 2" shell mill for my machine
[19:47:14] <ReadError> alex4nder: got any pictures of your setup?
[19:47:23] <pfred1> I use it for facing mostly it does it
[19:47:41] <ReadError> i really want the dual shaft motors
[19:47:48] <ReadError> so i can manually use it if necessary
[19:48:03] <alex4nder> ReadError:
http://www.andern.org/alexander/taig_milling_wood.m4v <- video, watch the loud volume.
[19:48:14] <alex4nder> the vacuum is on
[19:48:50] <pfred1> this is my mill
http://img535.imageshack.us/img535/8026/millpic.jpg
[19:49:09] <pfred1> or rather T slot drill press
[19:49:13] <ReadError> i heard the vice that comes with it sucks, is that true?
[19:49:19] <alex4nder> yes
[19:49:26] <alex4nder> vises are the hardest part of the taig
[19:49:40] <alex4nder> nothing is a really good fit
[19:49:47] <pfred1> alex4nder does the movable jaw lift when you tighten it?
[19:49:49] <ReadError> other than that you are pretty pleased?
[19:49:52] <alex4nder> pfred1: oh yes.
[19:50:05] <alex4nder> you play the whack/tighten/whack game a lot
[19:50:06] <pfred1> alex4nder OK to fix that put a piece of round stock in front of the jaw
[19:50:21] <alex4nder> pfred1: I could do that, until I run out of 'mouth'
[19:50:32] <alex4nder> I just got a toolmaker's vise instead
[19:50:46] <ReadError> alex4nder: sorry about bothering you, but is there a good off the shelf solution thats known to work?
[19:50:53] <alex4nder> the other problem with the taig vise is that it isn't that tall
[19:51:04] <pfred1> I got the vise on my mill table at a flea market for $20
[19:51:07] <alex4nder> ReadError: not really, but that's why you bought a mill, right? to make tools for your mill? ;)
[19:51:13] <pfred1> but it had ah, issues when I got it
[19:51:14] <ReadError> lol
[19:51:54] <alex4nder> ReadError: you and joe9 will both be setting up your taigs at the same time.
[19:52:01] <ReadError> ;o
[19:52:15] <jdhnc> I thought they were all out of stock
[19:52:20] <pfred1> alex4nder joe9 is putting the steppers he has on a taig?
[19:52:24] <alex4nder> yup
[19:52:27] <ReadError> got any pics of some work you done with metal ?
[19:52:38] <alex4nder> ReadError: not really, but it looks like every other mill
[19:52:54] <ReadError> decent tolerances ?
[19:52:54] <pfred1> alex4nder it needs motors that big?
[19:53:02] <alex4nder> pfred1: what did he get again?
[19:53:13] <ReadError> ide like to do some PCB work as well
[19:53:14] <pfred1> alex4nder something like 421 oz/in things
[19:53:18] <alex4nder> haha wut
[19:53:23] <alex4nder> I have 166 oz/in on mine.
[19:53:29] <djdelorie> ReadError: drilling or milling?
[19:53:33] <ReadError> both
[19:53:35] <pfred1> that is more inline with what I'd expect
[19:53:43] <pfred1> I thought he was building a big router or something
[19:53:51] <joe9> ReadError: check this out:
http://codepad.org/VdKbgUXv
[19:53:53] <alex4nder> pfred1: I can do like 60 IPM or something with 166s
[19:54:07] <jdhnc> big can be slow
[19:54:11] <djdelorie> I have a video of drilling on my cnc if you want to see
[19:54:16] <pfred1> alex4nder so yo ucan basically go your axis distance in what 3 seconds?
[19:54:17] <alex4nder> joe9: wait, which motors did you get?
[19:54:29] <alex4nder> pfred1: yah, but I don't run it that fast.. I run it at like 30
[19:54:37] <joe9> kl23276-30-8B
[19:54:39] <alex4nder> the machine doesn't like to move much above that.
[19:54:43] <pfred1> joe9 what motors are you putting on your taig?
[19:54:48] <joe9> kl23276-30-8B
[19:54:49] <ReadError> oh perfect joe9
[19:54:53] <ReadError> you got yours already?
[19:55:03] <joe9> yes, i have it here.
[19:55:08] <pfred1> joe9 what oz/in are they?
[19:55:11] <joe9> only a2zcorp.us has them in stock.
[19:55:18] <joe9> 282 oz-in
[19:55:27] <alex4nder> that's overkill
[19:55:27] <pfred1> oh that's not too bad i thought they were bigger
[19:55:30] <ReadError> joe9: you like it?
[19:55:31] <alex4nder> but not that bad
[19:55:33] <pfred1> it's a little overkill
[19:55:40] <joe9> ReadError: still assembling it.
[19:55:43] <ReadError> and, what vice/handle solution did you end up with?
[19:55:56] <alex4nder> the taig takes forever to spin its lead screws
[19:55:58] <pfred1> I think for a taig 250 would be good
[19:56:14] <alex4nder> pfred1: I don't think more than 166 is needed
[19:56:25] <alex4nder> it has 20 TPI screws
[19:56:46] <pfred1> well you can calculate the forse you have with your thread pitch and motor torque
[19:56:54] <alex4nder> the only time I've had a problem is when I overtightened the gib on Z
[19:56:57] <ReadError> http://www.hightechsystemsllc.com/pt_plate_18.html <--- awww their pictures are bad :(((
[19:57:28] <pfred1> 20 TPI is half what a micrometer has pretty fine pitch
[19:57:40] <alex4nder> so you spin the crap out of them constantly
[19:57:46] <ReadError> joe9: you taking any pics are you assemble?
[19:57:49] <pfred1> or get ballscrews
[19:57:51] <ReadError> ide love to see the process
[19:57:56] <alex4nder> pfred1: or get a different mill
[19:57:59] <djdelorie> with my motors and 3/8-16 screw, I managed to bend the screw rod when it drove the carriage into the end stop. Not on the cnc at least, this was a test rig
[19:58:01] <ReadError> but if not its ok, i guess i will see here shortly :)
[19:58:04] <joe9> no, no pics. seems pretty straightforward.
[19:58:13] <alex4nder> djdelorie: no bueno
[19:58:19] <ReadError> guess my price i paid isnt much more than amazon
[19:58:21] <joe9> still on the motors, g540
[19:58:27] <ReadError> plus the 6mo same as cash never hurts :)
[19:58:27] <djdelorie> it's OK now, but I calculated about 1500 lbs of force
[19:58:43] <ReadError> i work and all but free money is always nice
[19:58:59] <pfred1> djdelorie when you start doing the math it is insane the forces screws put out
[19:59:24] <ReadError> im going with a gecko controller as well joe9
[19:59:25] <djdelorie> yeah. Makes going with multi-start or low TPI screws more reasonable
[19:59:36] <pfred1> OK I got the iso here I need to burn it
[20:00:35] <pfred1> of course having 3 ubuntu isos in my Downloads directory doesn't make it any easier
[20:00:41] <joe9> readerror, i had more issues with the latency of linuxcnc/rtai
[20:00:47] <joe9> than with the machine
[20:01:30] <ReadError> you doing PCB work joe9?
[20:03:15] <ReadError> hmmm cant find the handles on taigs site
[20:03:19] <ReadError> unless they call them something else
[20:03:43] <pfred1> hand wheels?
[20:05:33] <jdhnc> you can make them after you get the mill built.
[20:06:19] <ReadError> pfred1: nothing!
http://www.taigtools.com/accessories.html
[20:06:36] <ReadError> its boggling my mind
[20:06:41] <ReadError> or maybe the lack of sleep
[20:07:22] <alex4nder> ReadError: it's on the site
[20:07:43] <jdhnc> dial handcrank
[20:12:23] <pfred1> we're booting up
[20:14:04] <joe9> ReadError: that is the plan.
[20:14:24] <pfred1> why are USB flash drives like crack? everytime I get one I just feel like I need another
[20:15:08] <ReadError> Milling vice with handcrank, 2.125" opening x 2" wide
[20:15:15] <ReadError> thats the only handcrank i see
[20:15:27] <ReadError> maybe i should check when im more awake tomorrow
[20:15:39] <ReadError> dang 4 day weeks make for long days, but long weekends
[20:16:02] <ssi> XXPCWXX: around?
[20:16:07] <pfred1> I clicked latency test in the live iso and my system just froze is that normal?
[20:16:52] <pfred1> it is a nightlite now
[20:17:11] <XXPCWXX> yes
[20:17:35] <pfred1> XXPCWXX it was the fastest lockup crash I've ever seen
[20:17:46] <ssi> XXPCWXX: got the HV card in today
[20:17:49] <ssi> just installed it
[20:17:53] <pfred1> soon as that button went down on the mouse it was over
[20:17:54] <ssi> initial tests look extremely promising
[20:18:01] <alex4nder> pfred1: that sounds like some RTAI problem
[20:18:44] <pfred1> alex4nder I could swear I've latency tested from inside the live image on another system
[20:19:11] <alex4nder> pfred1: yah, it /should/ work
[20:19:59] <XXPCWXX> Well its should be a lot better if the resolver signals are not clipped!
[20:20:08] <ssi> true! :D
[20:20:29] <ssi> I have a stable spindle-vel-fb now
[20:20:51] <pfred1> well that was anti-climatic
[20:21:00] <ssi> 60hz on the vfd in max gear, I get ~58rps
[20:21:06] <ssi> with a bit under 1rps noise
[20:21:52] <XXPCWXX> A terrible velocity reading is a sure indication of clipping
[20:21:59] <ssi> maybe 1.5rps noise
[20:22:04] <ssi> I'm not really sure what's acceptable
[20:22:20] <ssi> or if that little bit of noise means it's still clipping a little bit, or what
[20:25:35] <XXPCWXX> Might be but now it can be managed more easily (you can check for clipping by measuring at the LMV824 outputs) Also for a spindle the tuning could be changed to lower the noise (lower the P and I gain of the tracking filter loop gains)
[20:26:40] <XXPCWXX> I can also make a version with say 20% lower drive (until the tools allow changing internal parameters)
[20:27:40] <ssi> I'll measure at the amps soon
[20:28:03] <ssi> the spindle feedback is good enough to close the spindle loop and get synchronized motion working
[20:29:42] <ssi> XXPCWXX: how can I show you the output of halscope for my axis tuning?
[20:29:51] <ssi> I want to show you the dip in error I get on accel/decel
[20:30:01] <ssi> but I'm not sure if I Should capture a log or a screenshot or what
[20:30:02] <pfred1> ssi hit print screen
[20:30:04] <ssi> aha
[20:30:27] <pfred1> did it pop up a capture app?
[20:30:55] <pfred1> there is always xwd
[20:31:19] <ReadError> i need a turn table ;)
[20:31:21] <ssi> https://p.twimg.com/ApmY-H6CIAAo9xE.png:large
[20:31:22] <ssi> how's that
[20:31:23] <ReadError> rotary table*
[20:32:33] <pfred1> ssi I haven't used xwd since I learned about print sceen myself :)
[20:32:41] <ssi> heeh
[20:32:45] <ssi> printscreen worked a treat
[20:33:08] <pfred1> I think it is a window manager thing
[20:33:17] <ssi> yeah I'm sure it is
[20:33:38] <ssi> in my day we didn't use fancypants window managers
[20:33:49] <ssi> we used simple ones like WindowMaker... and we LIKED IT
[20:33:54] <pfred1> the classic is xwd -root -out dump.xwd or something
[20:34:01] <djdelorie> in my day we had C:\>
[20:34:12] <ssi> nah dos is for suckers
[20:34:20] <pfred1> I loved 6.22
[20:34:37] <Tom_itx> print frame will capture the active window
[20:34:47] <djdelorie> dos+djgpp is for not-suckers :-)
[20:34:48] <pfred1> I have a bootlegged copy of it someone Xed out the serial number
[20:34:50] <Tom_itx> one is alt-prtscr the other is ctrl-prtscr
[20:35:06] <ReadError> my hardest task im afraid, is going to be learning to use AutoCAD/sketchup :(
[20:35:16] <pfred1> but when my copy of MASM went sour that was the end of it for me
[20:35:26] <ssi> ahh masm
[20:35:29] <ssi> those were the days
[20:35:33] <djdelorie> I downloaded brl-cad yesterday but haven't gotten through much of the tutorial
[20:35:39] <pfred1> frigging floppy disks
[20:36:36] <pfred1> I wrote a program that'd dump any memory location in binary or ascii
[20:36:41] <ReadError> djdelorie: scared to learn it
[20:36:46] <pfred1> it was 13 pages long
[20:36:47] <ReadError> hasnt been updated since 08
[20:36:49] <ReadError> ;/
[20:38:33] <XXPCWXX> SSI what speed is that?
[20:38:56] <pfred1> XXPCWXX how come you got so fat?
[20:40:21] <pfred1> djdelorie it was right after I monkeyed around with djgpp that i started running Linux
[20:40:38] <pfred1> in 1995
[20:41:07] <ReadError> unfortunatly i do system admin work
[20:41:12] <ReadError> so i dont play with code too much
[20:41:18] <ReadError> but my background is all software
[20:42:22] <pfred1> slackware 2.4 or 3.0 or something
[20:42:41] <pfred1> a walnut creek CD-ROM of it
[20:43:29] * pfred1 wonders if his old Linux CDs are collectible today ....
[20:47:43] <ssi> thinpete: 3ips
[20:48:08] <ssi> pfred1: cheapbytes!
[20:48:19] <pfred1> ssi yup I have those too
[20:48:32] <thinpete> can you tune the FF1 better? Maybe at 2 IPS so you are no near the limits
[20:54:28] <thinpete> but you should be able to zero the ~2 mil error during cruse
[20:54:31] <ssi> yeah I need to try to read about it
[20:54:38] <thinpete> (with ff1)
[20:55:15] <ssi> well thing is, if I move FF1 at all, then error during positive moves goes one way and error during negative moves goes the other way
[20:55:33] <ssi> where it's set right now is the minimum difference between positive and negative cruise error
[20:56:37] <thinpete> They should be symmetrical (too much FF1 should make position always lead)
[20:56:58] <ssi> yeah that axis has never been symmetrical... it must be in the drive
[20:57:01] <Valen> ff1 could well be -ve too btw
[20:57:02] <ssi> Z is symmetrical
[20:57:06] <Valen> also look at offset
[20:57:14] <Valen> bah bias or whatever its called
[20:57:17] <ssi> I know there's a bias term, but it makes the dippy parts worse
[20:57:40] <Valen> btw look at different speeds too
[20:57:58] <ssi> ok
[20:58:03] <Valen> on mine i'd like to change ff1 based on speed
[20:58:10] <Valen> i have a non linear term somewhere
[20:59:05] <thinpete> If you cant null the cruse error with FF1 it indicates that the velocity drive is not symmetrical
[20:59:07] <thinpete> (different open loop RPM for +5 and -5)
[20:59:15] <ssi> right
[21:00:03] <thinpete> Do you have the 7I49 PWM mode set to 2?
[21:00:09] <ssi> yes
[21:00:14] <thinpete> (on all channels)
[21:00:45] <thinpete> (that would make it untunable)
[21:01:12] <ssi> I haven't explicitly set it on the channels I'm not using
[21:01:17] <ssi> but the channels that I am using are all set to 2
[21:01:56] <thinpete> and you are using channels 4,5,6 so you can reduce the resolver drive?
[21:02:15] <ssi> right now it's on the full-strength channels
[21:02:26] <ssi> I intend to check the reduced channels to see if my error improves
[21:02:33] <joe9> how bad is it to use a 4k7 current set resistor for a motor with 4.2A rating using Gecko g540?
[21:02:55] <thinpete> Thats probably still overloaded (not that it related to this problem)
[21:03:37] <ssi> thinpete: I measured around 3vrms on the sin/cos with full-strength drive
[21:03:51] <thinpete> OK
[21:03:57] <ssi> you mentioned setting the input resistors for a ~10v p-p signal
[21:04:23] <ssi> but I'll look at the opamp outs and see how they look this evening
[21:04:31] <thinpete> yeah that should be OK
[21:06:57] <pfred1> joe9 you might get away with it how many amps is a G540 total?
[21:07:06] <thinpete> But I think the tuning issue is the drive (maybe something adjustable) or possible the tach
[21:07:06] <ssi> 5 I think
[21:07:07] <thinpete> I suspect the best thing would be to remove the motor/tach and run in velocity mode
[21:07:09] <thinpete> (set the input voltage and see if the velocities are correct)
[21:07:25] <ssi> thinpete: I don't think there's a trivially easy way to do that
[21:07:26] <joe9> pfred1: max is 3.5A.
[21:07:52] <pfred1> joe9 then I guess the driver can't burn your motors out but your mitors might be able to burn the driver out?
[21:08:16] <ssi> thinpete: the motor's coupled to the leadscrew through a timing belt reduction, and the leadscrew is coupled to a gear through that little flex coupler, and then the tach pinion is driven by that gear
[21:08:21] <pfred1> I imagine mariss has some kind of overload protection going on
[21:08:36] <joe9> found a resistor combination of 3k3 + 1k. pfred1
[21:08:36] <thinpete> Do you have the drive manual?
[21:08:40] <joe9> that is probably better.
[21:08:41] <ssi> yea
[21:09:05] <pfred1> joe9 but your driver is max 3.5
[21:09:07] <ssi> joe9: I think you'll get 3.5A if you have more than 3.5k of set resistance
[21:09:21] <ssi> cause you can run it with no set resistor and you'll get 3.5
[21:09:46] <thinpete> I would go through its tuning procedure (and maybe swap drives if need be to isolate the problem)
[21:09:48] <pfred1> yeah save the resistor
[21:10:03] <joe9> that is what the g540 spec says. above 3.5 A, the current set resistor is not needed.
[21:10:12] <pfred1> there you have it
[21:10:15] <joe9> pfred1: ok, thanks. will not bother with the resistor.
[21:10:19] <ssi> I'll read up on it tonight. If I can remember to bring it to work, I'll scan the manual
[21:10:22] <Tom_itx> are all the config files the same for linuxcnc 2.5 or is there some conversion needed?
[21:10:25] <pfred1> one less thing
[21:10:58] <joe9> pfred1: ssi, but, the spec says that the "G540 will not go into currenty standby mode which will result in increased motor heating"
[21:11:02] <pfred1> mariss tries to design his drives to be idiot proof
[21:11:05] <joe9> without a current set resistor.
[21:11:23] <pfred1> stepper motors get hot anyways
[21:11:41] <pfred1> well you're going to need to find a 3k5 resistor then
[21:11:51] <joe9> ok, will put it in then.
[21:11:52] <joe9> thanks.
[21:12:21] <pfred1> but stepper motors can normally get unpleasantly hot
[21:12:52] <ssi> yes they can :P
[21:13:08] <pfred1> which is why it isn't a bad idea to mount them to heavy aluminum to heatsink them
[21:14:38] <djdelorie> Sweet! FF1 in my firmware cuts position lag to 1/7th
[21:14:48] <pfred1> djdelorie rocking
[21:15:17] <djdelorie> now, do I need to have a separate coefficient for FF1? I'm currently using the same coefficient I use for the offset->rpm math for FF1
[21:16:33] <djdelorie> at 600 RPM, I'm off by only 7 degrees now, instead of 62
[21:16:46] <pfred1> that is a big improvement
[21:17:04] <pfred1> are you using halscope?
[21:17:21] <djdelorie> no, this is all inside the controller. It has a text console, it tells me all the stats while it's running
[21:17:51] <pfred1> it just seems to me you're at the stage where people spend time with halscope
[21:18:06] <djdelorie> power volts, motor amps, hall stats, applied torque, positions and offsets, RPM, etc.
[21:18:21] <ssi> pfred1: people who use hal components use halscope
[21:18:28] <ssi> people who insist on doing everything from scratch don't ;)
[21:18:34] <djdelorie> I'm on the test rig. The cnc pc is in the basement. Halscope really isn't going to help me any ;-)
[21:18:47] <pfred1> well it is a good thing because The requested URL /docs/html/hal_tutorial.html was not found on this server.
[21:18:57] <djdelorie> the mcu on this card is five times more powerful than my first PC
[21:19:34] <ssi> not terribly germane :)
[21:19:44] <djdelorie> I know, just pondering...
[21:20:01] <pfred1> djdelorie this was my first PC
http://img708.imageshack.us/img708/7615/p7100104.jpg
[21:20:04] <djdelorie> there's plenty of power in there for a user interface
[21:20:45] <djdelorie> well, if we're counting "not an IBM PC", then it's 80 times more powerful than my first :-)
[21:21:02] <djdelorie> and 16 times more powerful than the PC I had in college, with more RAM too.
[21:21:23] <pfred1> we did more with less back then though
[21:21:55] <djdelorie> ANYWAY the controller monitors all the relevent stats and displays them on its console. I've used the second serial port as a soft-scope too, to draw waveforms and such
[21:23:00] <djdelorie> that's how I got the current controller working; it was sending me three analog channels and a bunch of digital over the serial link, and I'd just plot them
[21:25:18] <djdelorie> http://www.delorie.com/electronics/bldc/motor-current-plot.png
[21:25:18] <pfred1> well if you've only two options open to yo uthen you're at the coinscope stage
[21:25:40] <pfred1> where you flip a coin
[21:25:57] <djdelorie> easy enough to add another value to the config, I'll do that.
[21:27:31] * pfred1 things you need a more pithy title than Motor Stuff
[21:27:37] <ssi> :D
[21:28:04] <djdelorie> the type data it was plotting kept changing, the software needs a title but I didn't need to read it
[21:30:50] <djdelorie> division by zero is not your friend, in FF1 computations.
[21:30:53] <pfred1> if I was playing a game of one of these things doesn't belong together with these charts I'd pick the PWM one as the oddball
[21:30:55] <thinpete> ssi you can check if the problem is tach or drive by doing an equal speed slew in either direction
[21:30:57] <thinpete> and measuring the tach output either way (should be the same)
[21:31:10] <ssi> thinpete: I'm not sure what you mean exactly
[21:31:24] <ssi> just run it at a given velocity in each direction and measure the tach output voltage?
[21:31:31] <djdelorie> it's not the pwm signal, it's the pwm duty cycle
[21:31:33] <thinpete> Yes
[21:31:36] <ssi> ok
[21:31:50] <pfred1> djdelorie all the other patterns seem to go together but it is different
[21:33:32] <thinpete> you can also real-scope the tach output and look for funny business
[21:33:36] <djdelorie> I don't recall what I was testing at the time, I think it was predictive dynamic braking. Twas a bad idea, I took it back out
[21:33:40] <ssi> yeah I need to do that
[21:33:48] <ssi> I had the tach out and cleaned it once already
[21:34:15] <pfred1> ssi then you should be good at it now
[21:34:23] <djdelorie> i.e. I don't expect the data in that chart to *make sense* to anyone (probably including me), it's just a sample of what kind of data I can get from inside the controller
[21:34:26] <ssi> yeah but that was like a week ago :)
[21:35:30] <pfred1> djdelorie maybe I'm seeing things but I thnk I can see relationships bewteen some of the waveforms
[21:35:54] <djdelorie> in theory, the pwm signal should be in sync with one of the colored lines in the bottom (winding current)
[21:36:01] <thinpete> well since you have the loop closed and can get accurate velocities
[21:36:03] <thinpete> you can check both the tach and drive wit some constant speed moves
[21:36:17] <ssi> yeah
[21:36:30] <djdelorie> the winding current gives you an idea of rotor angle. I think the actual values only make sense if you know what the software was trying to do
[21:36:34] <ssi> maybe it's something stupid like a crappy ground
[21:36:52] <ssi> either in the velocity command to the drive or the bias supply
[21:36:57] <djdelorie> I should sample some more relevent data at some point
[21:37:05] <ssi> I don't know how accurate the bias supply to the drives needs to be
[21:37:28] <pfred1> djdelorie come on 7 degrees stay on target!
[21:37:44] <djdelorie> working on it :-)
[21:38:01] <thinpete> so if the tach is OK then you can mode on to the drive and see if you get ~ equal
[21:38:03] <thinpete> analog drive voltage for slews in each direction
[21:38:09] <thinpete> move on
[21:39:06] <pfred1> man it is going to be nice here tomorrow I should head down to the beach
[21:39:41] <ssi> thinpete: so i have a test file which just runs the axis from softlimit to softlimit in each direction
[21:39:49] <ssi> I've been doing that at 3ips, but I'll probably back it down to 2
[21:40:22] <Nick001> ssi - what did you clean the tach with?
[21:40:29] <thinpete> yeah center of range
[21:40:38] <pfred1> Nick001 tack cloth :P
[21:40:39] <ssi> Nick001: rag, then pencil eraser
[21:42:58] <Nick001> 91% alchohal and soak the 2 brushes in it. You have to get rid of all traces of oil to get it back to working the way it's supposed to.
[21:44:18] <ssi> lemme confirm it's the tach first :)
[21:44:28] <pfred1> rags and pencil erasers aren't the best degreasers
[21:44:29] <ssi> there wasn't any oil in it when I opened it
[21:44:34] <ssi> just brush dust
[21:45:11] * pfred1 is partial to acetone
[21:45:33] <Valen> acetone for the final wipe
[21:45:50] <Nick001> the alcohol takes care of that too. along with q-tips
[21:46:24] <Valen> acetone does a better job i feel
[21:46:51] <Nick001> can be hard to get a hold of
[21:46:53] <pfred1> residue free
[21:47:02] <ssi> I have plenty of acetone
[21:47:07] <ssi> where's it hard to get ahold of?
[21:47:18] <djdelorie> pure? with no additives?
[21:47:18] <Nick001> PA
[21:47:23] <Valen> hardware stores have it
[21:47:28] <ssi> home depot has it :P
[21:47:32] <ssi> now what depressed me
[21:47:39] <ssi> is they now have MEK (substitute) on the shelf :(
[21:47:46] <ssi> what happened to good ol' MEK?!
[21:49:02] <djdelorie> ok, you can't set FF1 bigger than a certain amount, it goes unstable...
[21:49:22] <ssi> djdelorie: are your drives velocity mode?
[21:50:13] <thinpete> probably same thing as acetone (both peroxides are high explosives)
[21:50:34] <ssi> peroxide?
[21:50:37] <ssi> MEK != MEKP
[21:50:40] <ssi> MEKP is scary as hell
[21:50:47] <ssi> permanent irreversible blindness and all that
[21:50:58] <Nick001> and they're solvents for the druggies
[21:51:07] <ssi> it's the primary reason I don't like to use vinylester resin for fiberglass
[21:51:36] <djdelorie> ssi: not sure if they match any common definition, but as I said, it goes offset->rpm->torque->current->voltage
[21:51:55] <djdelorie> my FF1 uses the current rpm to adjust the "offset" by the predicted lag
[21:52:04] <ssi> djdelorie: what's your actual command from the control?
[21:52:11] <djdelorie> from hal?
[21:52:14] <ssi> yes
[21:52:20] <djdelorie> simple step+direction like a stepper
[21:52:24] <ssi> oh
[21:52:53] <ssi> you've probably been told this, but you're probably better off making it accept a velocity or a torque analog command
[21:52:56] <ssi> and run it with a hal pid
[21:52:57] <djdelorie> the mcu has a hardware step+direction input that tallies the count. Each loop, I take any unaccounted for changes, apply them to my "desired position", and go from there
[21:53:23] <djdelorie> yeah, we talked about that earlier. The encoder goes to the controller though, and my current PCs have no way of hooking the encoder to the pc
[21:53:31] <ssi> i see
[21:53:45] <djdelorie> I did test it out to 1,000,000 steps per second though :-)
[21:54:41] <djdelorie> the motor can't go that fast, but it doesn't lose counts
[21:55:01] <pfred1> how fast can the motor go?
[21:56:30] <djdelorie> volts/kRPM is 35.1, up to 160 volts, so 4500 rpm? The spec tops out at around 5000, and I'm only giving it 120 volts so 3000 rpm
[21:56:52] <djdelorie> that's 200,000 counts/sec max
[21:57:23] <djdelorie> if I go to full microstepping
[21:57:50] <pfred1> do your motors benefit from microstepping?
[21:58:06] <pfred1> I mean the only reason steppers use it is because it helps with resonance
[21:58:09] <djdelorie> well, there are 12 physical "steps" per rotation, so it's kinda required. They're BLDC
[21:58:32] <ssi> electronic commutation != stepping :)
[21:58:39] <djdelorie> the encoder gives me 4000 counts per rotation (1000 lines), and the software maps each of the PC's step as some number of encoder steps
[21:58:41] <pfred1> but those aren't microsteps those are the motor's steps
[21:58:57] <djdelorie> I know, I call it microstepping because people who don't know what I'm doing will understand the results anyway :-)
[21:59:05] <pfred1> k
[21:59:41] <djdelorie> i.e. if I configured it for 200 steps per rotation, it's the same as a common stepper. 400 steps per rotation simulates a stepper with 2:1 microstepping. Etc.
[22:00:04] <pfred1> I have 400 step steppers
[22:00:05] <djdelorie> I can configure it for 7 counts per step and it wouldn't simulate anything in real life, but that's just silly
[22:00:14] <djdelorie> do you have 4000 step steppers?
[22:00:36] <pfred1> no
[22:01:19] <djdelorie> the controller doesn't actually "step" the motor at all, it applies torque until it moves to the right spot.
[22:01:40] <pfred1> current?
[22:01:41] <thinpete> BLDCs run in Q mode: stator field at 90 degrees to rotor
[22:01:43] <thinpete> Step motors run in D mode: stator field aligned with rotor except when stepping
[22:01:57] <djdelorie> yeah, the inner loop controls winding current
[22:02:21] <djdelorie> to produce a magnetic field 90 degrees to the rotor, on one side or the other depending on direction.
[22:03:25] <pfred1> there sure aren't a whole lot of source based Linux distros are there?
[22:03:39] <djdelorie> they're all source based *somehow* :-)
[22:03:48] <pfred1> http://distrowatch.com/search.php?ostype=Linux&category=Source-based&origin=All&basedon=All¬basedon=None&desktop=All&architecture=All&status=Active
[22:04:05] <djdelorie> just last summer I built an ARMv7 version of Fedora from scratch
[22:04:07] <pfred1> I think they mean from a management perspective
[22:04:22] <djdelorie> most aren't, but most could be if you wanted
[22:04:46] <djdelorie> for example, Fedora makes it pretty easy to download a source RPM instead of a binary, build your own binary RPMs from it, and install those.
[22:04:50] <pfred1> slack kind of burned me out of compiling but I'm getting fed up with package management
[22:06:17] <pfred1> I feel like I'm on an upgrade merry go round anymore
[22:06:38] <pfred1> once i get a system setup how I like it I don't want anything new or different or exciting on it
[22:06:50] <pfred1> I just want it to run
[22:09:16] <pfred1> like i ran suse 8.2 until that machine blew up
[22:09:27] <pfred1> something like 7 or 8 years
[22:09:51] <pfred1> and i was happy
[22:13:21] <pfred1> debian used to be the dinosaur distro but even they have been changing lately
[22:14:27] <pfred1> I was so pissed the other day when I tried to install something on this box and all the repos for Lenny are gone now
[22:17:37] <Jymmm> all gone?
[22:18:33] <pfred1> I didn't check the whole Internet but everywhere I looked oldstable is gone
[22:18:54] <Jymmm> what do you mean gone?
[22:18:57] <ssi> thinpete: ok so I get more voltage from the tach in one direction than the other
[22:19:05] <ssi> at 50ipm it's 19v in one direction and 17v in the other
[22:19:12] <ssi> at 180ipm it's like 70v and 63v
[22:19:13] <pfred1> oh that is right I tried to update my dpkg-find or something
[22:20:29] <pfred1> apt-file update
[22:20:55] <pfred1> Can't get
http://security.debian.org/dists/lenny/updates/Contents-i386.gz
[22:20:59] <Jymmm> WTH?
http://www.debian.org/releases/oldstable/
[22:21:45] <Jymmm> they jsut dropped 5 and went to 6?
[22:22:06] <pfred1> yeah I knew they weren't updating it anymore but I could still access the repo
[22:22:17] <pfred1> but a couple days ago the repos all vanished
[22:22:36] <Jymmm> it was RELEASED march 2012, last month, and now dropped????
[22:22:43] <pfred1> no Lenny
[22:22:53] <pfred1> lenny is ancient
[22:23:00] <Jymmm> READ THE LINK
[22:23:04] <Jymmm> it says MArch 2012
[22:23:13] <pfred1> well that is whacky
[22:23:21] <pfred1> I installed it on this box in 2010
[22:23:36] <Jymmm> http://www.debian.org/News/2009/20090214
[22:23:40] <Jymmm> 2009
[22:23:44] <Valen> hmm only seem to be on 20mbit
[22:23:50] <Jymmm> nfc
[22:24:27] <pfred1> I didn't install it the day it came out
[22:24:27] <ssi> Z axis tuning is looking reasonable
[22:24:47] <ssi> error noise is on the order of +/- 0.0005"
[22:25:01] <ssi> still doesn't seem great
[22:25:04] <ssi> but no clipping on the opamps
[22:25:11] <pfred1> ssi what are you surface grinding?
[22:25:24] <ssi> pfred1: nothing at the moment, why
[22:25:48] <pfred1> that is the smallest increment on a surface grinder
[22:25:55] <pfred1> 0.0005
[22:26:27] <ssi> pfred1: this lathe is supposed to have 0.000020 resolution, and I wants it :)
[22:26:54] <pfred1> ssi you know if you get it you'll never know it right?
[22:27:22] <pfred1> 0.002 is barely perceptable
[22:27:24] <ssi> maybe not eaxctly
[22:27:29] <ssi> well that's just not true
[22:27:35] <pfred1> yes it is
[22:27:35] <ssi> I can easily measure to a half tenth
[22:27:40] <ssi> .00005
[22:27:43] <pfred1> I said perceptable
[22:27:50] <pfred1> as in see it and feel it
[22:27:59] <ssi> I fail to see how that's germane
[22:28:46] <thinpete> ssi: error noise is on the order of +/- 0.0005"
[22:28:48] <thinpete> Thats enormous is this static position noise?
[22:28:52] <pfred1> we'd do steps on blocks on grinders and at 0.002 it just looks a little different
[22:28:56] <ssi> no, that's at 3ips
[22:29:15] <ssi> static error noise is very low
[22:29:21] <ssi> lemme graph position juts to be on the safe side
[22:29:21] <pfred1> 0.003 you can see and feel pretty good though
[22:29:25] <thinpete> so thats including tachs and all
[22:29:55] <thinpete> you should be able to do 10 time better
[22:30:02] <ssi> I hope so
[22:30:36] <ssi> i'd say static resolver noise is now like 1-2 microinch
[22:30:54] <thinpete> thats more like it
[22:31:44] <thinpete> the funny one side dip on accel also looks like tach/drive wierdness
[22:31:58] <ssi> you see my note about how the X tach is reporting a voltage differential?
[22:32:59] <thinpete> Yeah thats bad (10% asymmetry)
[22:33:33] <ssi> not entirely sure what to do about that
[22:34:46] <thinpete> Maybe cradek can help
[22:36:09] <thinpete> or maybe the brush cleaning/replacement as others have suggested
[22:36:33] <Nick001> try recleaning with acetone and see if there's a differnce in performance. There usually is.
[22:37:10] <pfred1> a buddy of mine that does control electronics says 90% of the problems he encounters are faulty connectors
[22:38:36] <thinpete> Someone (skunkworks?) replaced s a bad tach with a spare analog channel driven by the velocity signal (encoder in that case)
[22:38:59] <ssi> hmm
[22:39:40] <thinpete> but he was able to set the tach gain so +-10V was enough
[22:40:24] <thinpete> (only suggesting as a last resort)
[22:42:50] <Nick001> I'd like to know more about that one as an alternative to what I'm doing
[22:44:11] <ssi> well in happier news
[22:44:14] <ssi> my machine has way wipes now
[22:44:39] <Valen> always nice
[22:44:45] <Thetawaves> ssi, how do you get anything done while being on irc all day?
[22:45:00] <ssi> irc is on every computer I work on :)
[22:45:08] <Valen> i spend my day waiting for computers to boot :-<
[22:45:09] <ssi> including my machine control machines
[22:45:58] <ssi> oh and I got a quote from morris on that flex coupler
[22:46:00] <ssi> $88
[22:46:18] <Nick001> same as hardinge?
[22:46:26] <ssi> morris is hardinge's only distributor now I believe
[22:46:28] <ssi> at least in my area
[22:46:41] <ssi> I called hardinge and it rang through to morris
[22:46:44] <ssi> I have an account set up there now
[22:48:42] <thinpete> do they have tach brushes?
[22:48:54] <ssi> not sure about that!
[22:49:08] <ssi> I can certainly clean them
[22:49:37] <Nick001> If you have a coupler on hand, you'll never break another one
[22:49:44] <ssi> heheh this is true
[22:49:47] <thinpete> are the brushes easy to take out? (screw caps etc?)
[22:49:59] <ssi> yeah the contacts are screw caps
[22:50:08] <ssi> I didn't know that the first time and took the whole thing apart
[22:50:15] <ssi> however that gave me a chance to clean up the commutator as well
[22:54:11] <thinpete> 'nite all
[22:55:07] <ssi> night
[22:56:55] <ssi> so now I gotta figure out the hal magic to get spindle synchronized motion working
[22:57:19] <djdelorie> hal.magic = 1; ?
[22:58:35] <ssi> that's the one
[23:03:26] <pfred1> /j #gentoo ; hey anyone here run gentoo?
[23:07:25] <pfred1> Important: Read this whole subsection before continuing, as you will probably not have the opportunity to read it before doing things later?
[23:07:54] <djdelorie> step 1: reboot your text viewer software. step 2: crap, get your text viewer software back...
[23:08:32] <pfred1> Itried to install arch once I made a USB key installed it then I was like now what?
[23:08:59] <pfred1> you need to be the amazing kreskin to install that stuff!
[23:09:00] <ssi> pfred1: I used to run gentoo
[23:09:51] <pfred1> ssi some of it sounds like a hassle but it might be worth it for what I want
[23:10:15] <ssi> it's a hassle, but it's nice when it's all setup
[23:10:29] <ssi> I quit using it because I Started managing dozens of vm servers
[23:10:33] <pfred1> they're all hassles to really setup
[23:10:33] <ssi> and it's unmaintainable for that
[23:10:40] <ssi> I use debian now
[23:10:42] <ssi> for servers
[23:10:45] <ssi> osx for desktops
[23:11:26] <pfred1> I'm all debian now but I don't really like Squeeze so much
[23:11:57] <pfred1> I have a laptop that is a brick because of debian
[23:12:21] <joe9> pfred1: have you tried crux? it is awesome.
[23:12:43] <pfred1> joe9 what makes crux so awesome?
[23:12:50] <joe9> simplicity.
[23:12:56] <pfred1> I like simple
[23:13:08] <djdelorie> New Crux! Now with 17% more Awesome!
[23:13:29] <pfred1> I swear there are more Linux distros than users
[23:14:17] <djdelorie> 99 versions of Linux at the mall
[23:14:22] <djdelorie> 99 versions of Linux
[23:14:26] <djdelorie> take one down, pass it around...
[23:14:28] <pfred1> try 9,999
[23:14:31] <djdelorie> 104 versions of Linux at the mall...
[23:14:40] <pfred1> oh i see how it works now
[23:15:41] <pfred1> my favorite is ballmer ranting how the GPL is a virus
[23:15:50] <Thetawaves> djdelorie, that is hilarious
[23:16:00] <djdelorie> Microsoft is now on the "top Linux contributers" list
[23:16:23] <pfred1> they're 16th and the stuff they contribute is only so some Vm of their works better
[23:16:37] <djdelorie> doesn't matter why, they're helping :-)
[23:16:59] <pfred1> if 8 goes over like a lead balloon I predict Windows 9 will be Linux
[23:17:26] <pfred1> they really don't make any money on Windows
[23:17:37] <Thetawaves> how can that be true.
[23:17:43] <pfred1> because htey make it on office
[23:17:59] <pfred1> and other junk that works with windows
[23:17:59] <Thetawaves> lol, every license of windows costs *something*
[23:18:04] <Thetawaves> and they move a lot of licenses
[23:18:20] <pfred1> other divisions have been carrying the OS division for years
[23:18:54] <Thetawaves> got any links?
[23:19:25] <ssi> anyone ever use the gearchange component?
[23:19:31] <pfred1> think about it what is harder ot make a whole OS or an office suite
[23:19:50] <pfred1> now what do they charge for each?
[23:20:08] <Thetawaves> a lot
[23:20:10] <ssi> pfred1: at this point they likely invest far more money in the office suite
[23:20:15] <ssi> the OS hasn't really changed
[23:20:17] <pfred1> they charge twice as much for the office suite
[23:20:20] <ssi> it's gotten a couple facelifts
[23:20:21] <ssi> that's about it
[23:22:28] <pfred1> a big problem MS has had is they treat all code as assets
[23:22:50] <pfred1> hard to toss out the cruft when you're bean counting it
[23:51:02] <ssi> I wonder what the fastest I oughta reasonably run this spindle is
[23:51:17] <ssi> high clutch at 90hz seems to yield about 5k
[23:51:20] <ssi> but that's probably too fast
[23:51:22] <pfred1> if you see smoke you may want to back off
[23:52:26] <ssi> maybe so
[23:54:54] <ssi> I'm gonna limit to 3600 for now
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
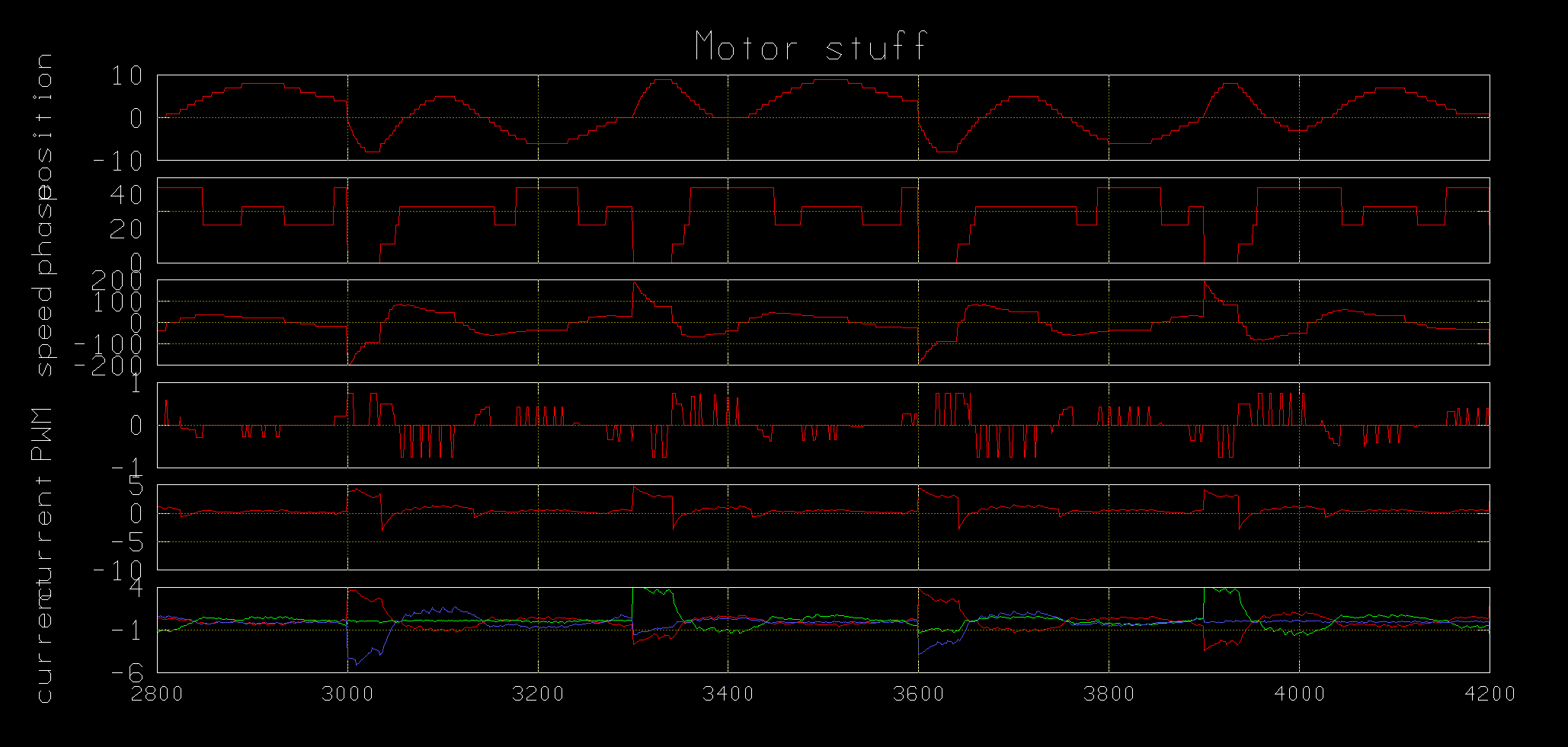{kind=link}