#linuxcnc-devel | Logs for 2015-05-29
Back
[04:57:14]
<tinkerer>
parport
[04:58:06]
<tinkerer>
oups... just noise
[07:51:25]
<skunkworks>
https://www.youtube.com/watch?v=QUt-7tHbgC0&feature=youtu.be
[07:52:00]
<skunkworks>
is it me - or does that not look anywhere near 35000mm/m (1377in/min)
[07:59:52]
<pcw_home>
35000 MM/M looks about right ( maybe a second to traverse full range = 20 inches? )
[08:00:21]
<archivist>
looked "not slow"
[08:01:01]
* archivist waits for skunkworks to get one of them to measure it
[08:01:07]
<pcw_home>
(though the Shapeoko probably bends quite a bit with .4 G accel)
[08:05:13]
<skunkworks>
ok
[08:05:51]
<skunkworks>
I was trying to decide if I was awake enough to figure out scale :)
[08:06:23]
<skunkworks>
I have an uno - which I think will run it. Just not here at the moment
[08:10:00]
<skunkworks>
https://groups.google.com/forum/#!topic/machinekit/13CyJvWyN90
[09:42:31]
<ssi>
1377ipm isn't all that fast
[09:54:08]
<mozmck>
yeah, only 1.304mph
[09:55:30]
<ssi>
haha
[10:21:56]
<jthornton>
my ink jet is out of ink time to buy a laser printer
[10:22:09]
<ssi>
yeah
[10:22:17]
<ssi>
I haven't bought an inkjet in decades
[10:22:33]
<ssi>
aside from the high end photo printers
[13:35:01]
<skunkworks>
grbl is pretty neat for what it is.. It was pretty painless getting the arduino flashed and a gui running (picked a popular java based interface)
[13:42:28]
<skunkworks>
heh - trajectory planning is hard :)
[13:43:23]
<skunkworks>
it cornering tollerannce is set to .01mm and it seems to go over it's acceleration limits only by about 2X
[13:43:36]
<skunkworks>
its
[13:43:57]
<skunkworks>
if you set it to .1 (.0039") it goes over by 3 times +
[14:02:02]
<skunkworks>
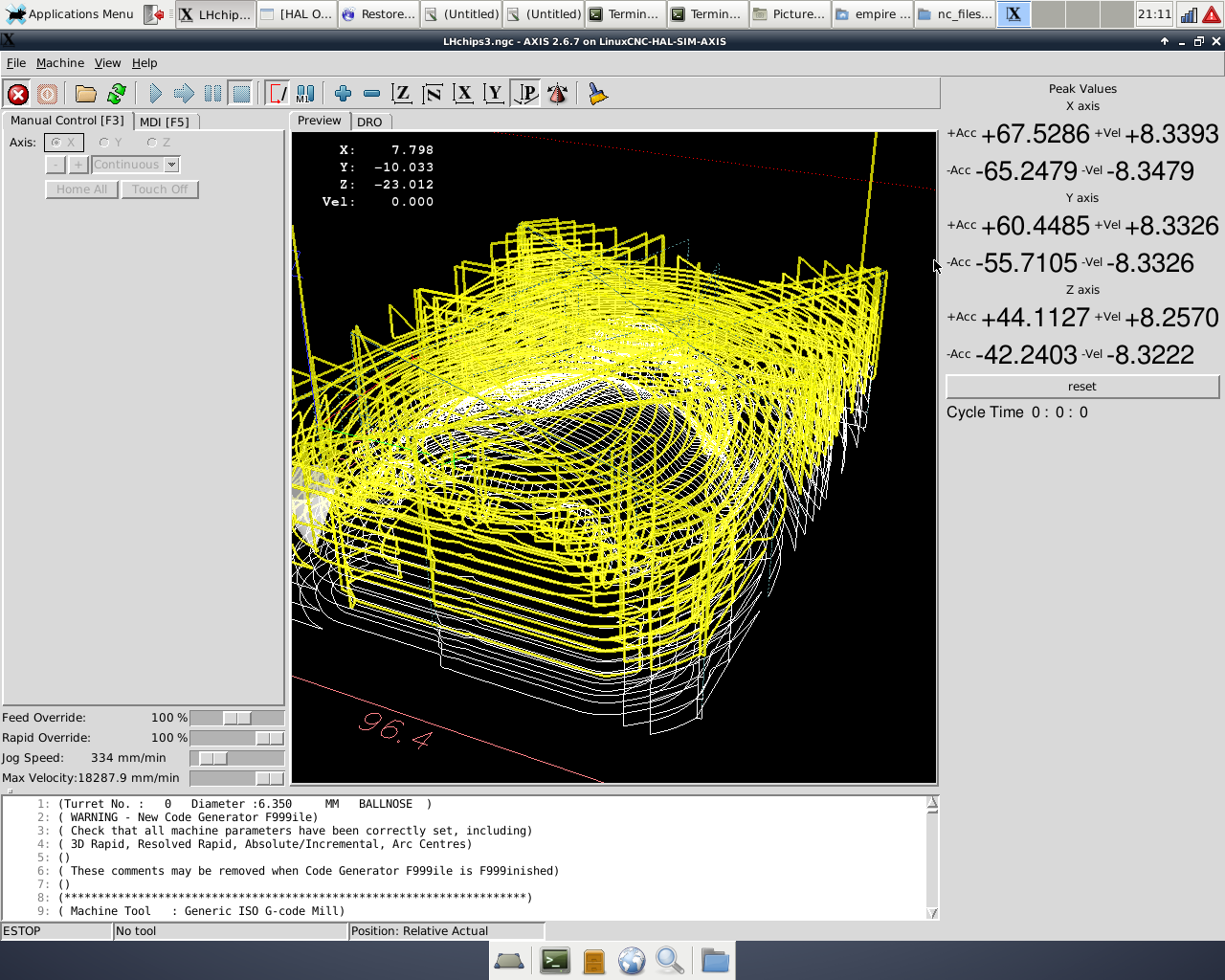
default cornering tolerance (what ever that means exactly) .01mm took 10:32
[14:02:09]
<skunkworks>
http://electronicsam.com/images/KandT/testing/grbl/grblplot.png
[14:02:34]
<skunkworks>
the arduino was set to 30in/sec^2 and 500ipm
[14:02:57]
<skunkworks>
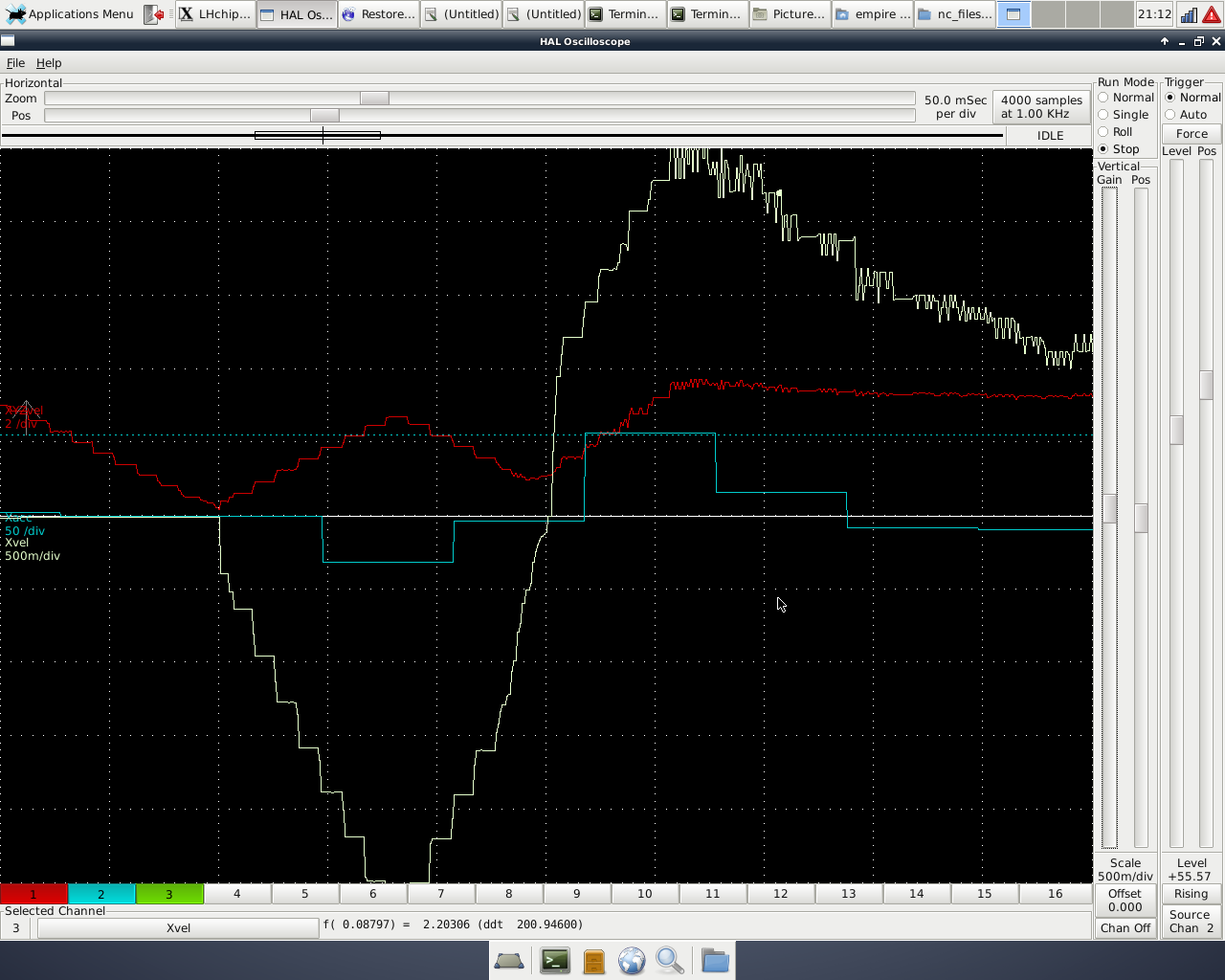
some plots of that run
[14:02:58]
<skunkworks>
http://electronicsam.com/images/KandT/testing/grbl/grblhalscope1.png
[14:03:47]
<skunkworks>
http://electronicsam.com/images/KandT/testing/grbl/grblhalscope2.png
[14:04:00]
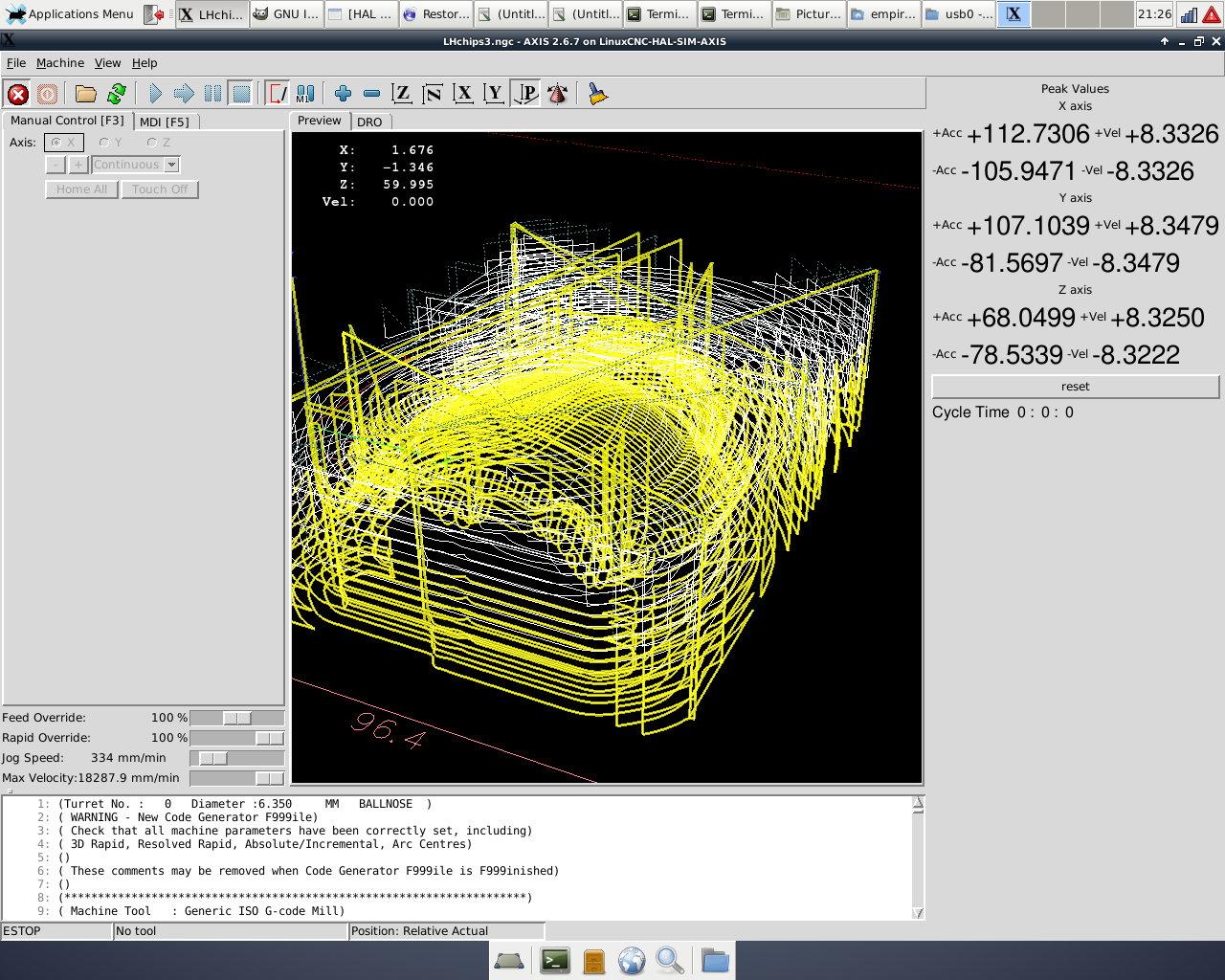
<skunkworks>
now with the tolerance set to .1 (.0039")
[14:04:13]
<skunkworks>
http://electronicsam.com/images/KandT/testing/grbl/grblplothigher.png
[14:04:32]
<skunkworks>
http://electronicsam.com/images/KandT/testing/grbl/grblhalscopehigher.png
[14:26:39]
<cradek>
halscope is awesome
[14:26:51]
<cradek>
it's extremely neat you can use it in this way
[14:27:07]
<skunkworks>
isn't it?
[14:27:39]
<cradek>
I bet that's the first time that stuff has been measured
[14:27:58]
<skunkworks>
probably... It is probably just therory that it works ok.
[14:28:03]
<skunkworks>
Theory
[14:28:29]
<skunkworks>
it isn't bad - that whole program ran with no hickups other than the violations. It is impressive.
[14:29:21]
<skunkworks>
I really need to get a decent working running average componant
[14:30:23]
<skunkworks>
the one I hacked together doesn't work well with zero crossing.
[14:34:32]
<cradek>
what if you just sample with a much slower thread?
[14:35:12]
<skunkworks>
that is how I am doing it now. I am ddt'ing over about 60ms
[14:35:29]
<cradek>
ah
[14:35:29]
<skunkworks>
so you get the boxcar acceleration plots.
[14:35:41]
<skunkworks>
I was hoping for something better
[14:39:19]
<skunkworks>
zlog
[14:42:12]
<skunkworks>
http://imagebin.ca/v/22PTVKng92NW
[14:42:27]
<skunkworks>
that is what the rolling average componant did at zero crossing
[14:42:45]
<cradek>
that looks really familiar
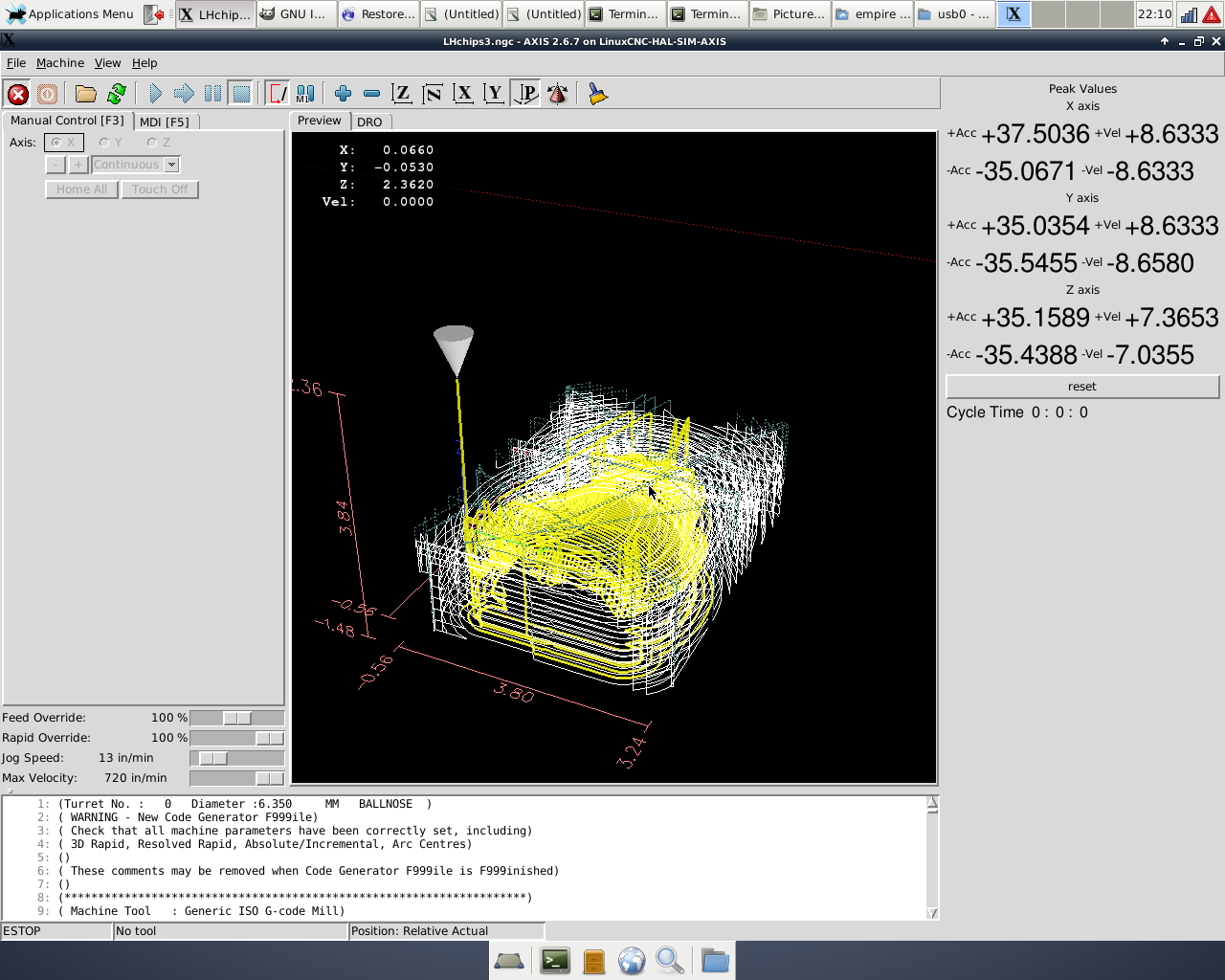
[15:04:26]
<skunkworks>
linuxcnc running it
http://electronicsam.com/images/KandT/testing/grbl/linuxcnc1.png
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}