Back
[00:04:35] <hypermagic> Old tractors never die! Ursus vs. Land Rover.
https://www.youtube.com/watch?v=PLQfYUtuwAI
[00:05:18] <vsync> might just might have to do something with the wheels
[00:05:43] <hypermagic> Dampf -Traktor pflügt - Steam Tractor plowing
https://www.youtube.com/watch?v=TkEukI6H9cA
[00:05:52] <hypermagic> also, you can fire them with anything
[00:07:14] <vsync> anonnumberanon: wow. that's efficient making a sensor its own pcb
[00:07:19] <vsync> all of them
[00:07:49] <anonnumberanon> What are you trying to say vsync ?
[00:08:11] <vsync> what do you think
[00:08:35] <anonnumberanon> My brain cannot compile you sentence.
[00:09:04] <Thrashbarg> sarcasm implied or something? I'm confused too :/
[00:10:27] <anonnumberanon> Well this thing is obviously a huge cluster**** when what I had was a tiny little board that had both gyro and accelero together (MPU 6050).
[00:10:55] <vsync> i know
[00:11:08] <vsync> quads are the new disease
[00:12:41] <anonnumberanon> Don't bite the hand that feeds you ;)
[00:13:11] <vsync> oh, but it doesn't
[00:14:04] <vsync> if you're referring to delivery by a god damn quadcopter, i'm eager to see that
[00:15:45] <vsync> with flight times 20-25 mins using lipos without payload, yeah i'm eager to see my stuff delivered with it
[00:16:03] <vsync> and 25 min is really pushing it
[00:17:11] <anonnumberanon> >implying hobby quads, racing quads, observation quads, educative quads are not making any money right now
[00:18:17] <vsync> i fly rc myself, i know
[00:18:41] <vsync> racing quad equals hobby quad. observation quad, mostly implies research. none of which should make any money either
[00:19:38] <vsync> quad competitions will always remain as a hobby, can have peanuts for prizes but it won't ever become a serious sport as such
[00:19:54] <vsync> anyway that wasn't my point
[00:19:58] <anonnumberanon> Yeah perhaps you'd rather buy an actual helicopter for observation purposes.
[00:20:13] <anonnumberanon> (if you're a government)
[00:20:18] <vsync> that's not what i was saying at all
[00:20:37] <vsync> if you imply this, yes, all of the above are making money from a market standpoint
[00:20:54] <anonnumberanon> You are saying there is no such thing as the multi rotor industry, right?
[00:21:14] <vsync> there is, a niche "industry", if you will
[00:21:27] <vsync> however the industry in reality is called RC
[00:22:08] <anonnumberanon> And of course all the derived products that use the same technologies, such as gyro/accelero for position (rocket industry and others).
[00:22:30] <anonnumberanon> And soon to be more affordable, Lidar systems.
[00:23:01] <vsync> surely, but the "tech" for quads is actually derived from other "industries"
[00:25:00] <anonnumberanon> What do you fly? Not a multi rotor?
[00:25:33] <vsync> you don't fly multirotors. they fly themselves
[00:25:50] <vsync> every man and their dogs can fly them, it's the new disease, told ya
[00:26:58] <vsync> i'm really digging this stallman bit though, at 14 mins the host himself goes berserk
[00:27:25] <vsync> you can see how he's pissed beyond limits
[00:33:18] <vsync> wonder if stallman and wozniak have get-togethers on a weekly basis where they groom their beards and light a few bowls
[00:34:03] <vsync> though i have the utmost respect for wozniak
[00:34:22] <anonnumberanon> wait what? there is a new Stallman video?
[00:34:37] <vsync> https://www.youtube.com/watch?v=uFMMXRoSxnA i don't know.
[00:34:52] <anonnumberanon> ah yeah, know that one
[00:36:16] <anonnumberanon> Also, why would you fly anything using a poorly-engineered by evolution human brain?
[00:36:51] <anonnumberanon> (assuming we don't call digital tools engineered by us and thus by evolution)
[00:37:02] <vsync> that doesn't even make any sense. rephrase please
[00:37:11] <vsync> in english
[00:37:29] <anonnumberanon> it's okay
[00:38:36] <vsync> that really is mongo speak, can't understand
[00:38:58] <vsync> are you saying that all designs for aircraft are poor, because they are made by human?
[00:39:02] <anonnumberanon> I wouldn'
[00:39:18] <anonnumberanon> t assume you would understand if you can't answer a simple question.
[00:39:41] <vsync> seems like i hit a nerve
[00:40:15] <anonnumberanon> Seems your intuition is unbalanced, probably biased as well.
[00:40:23] <vsync> um, oh. That's what you meant, even though it was cryptic. So why'd you fly anything using your brain, ha
[00:40:54] <vsync> oh, but then again you could argue that why'd you fly anything with an algorithm devised by said brain, like you said
[00:41:40] <vsync> quadcopters -- rc, are hobby stuff mostly. they are used in photography and even in cinematography occasionally, sure, and it's growing i comprehend this
[00:42:09] <vsync> but i bet my left nut you are just a hobbyist
[00:42:12] <anonnumberanon> Obviously because our poorly-designed (depending strongly on you programming skills) software is used with very fast hardware that the brain cannot match, in the specific areas of interest, like clock frequency.
[00:43:07] <vsync> when you call it flying, it's much more enjoyable if you use this said borderline degenerate brain
[00:44:08] <anonnumberanon> Yes, you can indeed shelter yourself in RC if you are looking for those kinds of thrills. FPV seems actually worth doing.
[00:44:18] <vsync> everyone's enthusiastic about these quads, majority's enthusiasm lasts for a few months tops
[00:45:29] <vsync> occasionally i fly fpv
[00:45:39] <vsync> which is pretty fun with a flying wing
[00:46:29] <anonnumberanon> That's why you go autonomous flight. Ups the challenge for some real learning, and some tears shed everyday.
[00:46:57] <MrMobius> flying without tear shedding is just not worth it
[00:47:01] <vsync> quads are inefficient, and killjoys
[00:47:15] <vsync> if you want autonomous flight, then it's not flying, it's designing
[00:48:11] <vsync> and the apex of the available battery tech is lipo, and even with that you cannot get that much flight time
[00:48:36] <vsync> so, in a majority of cases, helicopters still win for observation.
[00:48:37] <anonnumberanon> 15 minutes if fine to help a tactical entry team
[00:48:50] <vsync> sure, niche applications
[00:49:16] <vsync> (or weather balloons, for observation, heh)
[00:49:59] <anonnumberanon> These days though, niches is all we have, am I right?
[00:50:26] <anonnumberanon> Think about Woz.
[00:50:46] <anonnumberanon> "The computer will never be a consumer device."
[00:51:41] <vsync> what's that?
[00:52:35] <vsync> for example this (was it amazon?) proposing delivery with quads
[00:52:42] <vsync> sure, this works in a really small metro area
[00:52:56] <vsync> and with small parcels, sure
[00:53:53] <vsync> but if you really want to deliver with drones, and say not in a metro area, you're better off using a fixed wing plane which is way more efficient.
[00:54:29] <anonnumberanon> This is the type of communication operation that conglomerated manufacturers (really all the quad companies) do to increase the size of their industry regardless of the outcome of it. Again, regardless, it does not mean multi rotor technology as an industry is doomed to never liftoff the ground.
[00:54:36] <anonnumberanon> Pun not intended. Not
[00:56:22] <vsync> there are niche applications with the current battery tech, sure. such as photography and cinematography, yep
[00:56:51] <anonnumberanon> The actual future in this business, not that I want to be especially part of it, could be that quadcopter would decrease in price from their already low cost and be purchased for helping in those jobs when it's better to risk $400 than a human life.
[00:57:59] <vsync> such as?
[00:58:38] <anonnumberanon> Take one inside Fukushima with a geigercounter and camera. Find the places the ground collapsed, the intensity of radiation.
[00:58:42] <vsync> i can picture observational stuff
[00:59:16] <vsync> that's quite good
[00:59:38] <vsync> i was thinking of such, but yet again, very niche applications
[00:59:45] <vsync> marginal, so to speak
[00:59:46] <anonnumberanon> Ram the bad guy's door, throw in the quad with tazers, gas, or a camera, heat sensors etc, then decide if tactical team should actually burst in.
[01:00:28] <vsync> i believe said quad could be taken out quite easily, after the acknowledgement of such technology
[01:00:52] <vsync> then again, worth a shot
[01:01:38] <vsync> however this whole conversation is besides the somewhat sarcastic point i was trying to make in the first place
[01:01:42] <anonnumberanon> your quad just got taken about by the bad guys, you potentially saved a life
[01:02:15] <vsync> perhaps, that's all fine and dandy. I wish the best for this "industry"
[01:03:36] <vsync> maybe the battery technology will be revolutionized by this so-called industry, due to the need for the feds to keep their quads off the ground longer to taze all the bad guys
[01:03:45] <anonnumberanon> I do hate the weight of batteries, it is about 40% of the entire weight of my project.
[01:04:12] <vsync> is your project armed with tazers? You're going commercial?
[01:04:19] <vsync> big $$$?
[01:04:56] <anonnumberanon> Well my teammate keeps wishing we put a tazer on it but my senior design teachers would surely disagree. Wait, unless I tazed them.
[01:05:13] <vsync> so what's the competition then
[01:05:19] <anonnumberanon> But then our grade would suffer.
[01:06:30] <vsync> i do understand your enthusiasm, exciting projects
[01:06:49] <anonnumberanon> competition? some other teams are doing different quads but the main question is, can it autonomously liftoff, hover, then land
[01:07:15] <vsync> is this college?
[01:07:35] <anonnumberanon> nobody has done it in recent years, I'm confident we'll get that done without too much trouble, before getting it to do more interesting things, yeah university
[01:07:48] <vsync> you can do that with off-the-shelf stuff
[01:07:53] <vsync> for less than $200
[01:07:56] <anonnumberanon> forbidden
[01:08:14] <vsync> i'm betting the flight computer you were using was off-the-shelf
[01:08:43] <anonnumberanon> How do you document a design, that is first, closed-source, and second, that you don't even understand yourself, obviously since you didn't build it/program it.
[01:09:06] <vsync> nope, not closed-source
[01:09:21] <anonnumberanon> making my own with a combination of AVRs and a raspberry pi if we need it.
[01:09:29] <vsync> raspberry pi, hahaha
[01:09:48] <anonnumberanon> cliche
[01:10:31] <vsync> using a fucking raspberry pi (insert laugh), is the same as using a flight computer that is bought. circuit diagrams can easily be found, and the software is open source aswell
[01:10:53] <vsync> it's nothing but pwm outputs, analog inputs and interfacing a few sensors
[01:11:24] <vsync> and, usually the programming ports are already broken out, so you may modify the existing software or write your own
[01:11:35] <anonnumberanon> that will do things that are not intersting to redesign for the eth fucking time, like wifi, taking video. Also none of them but me use Linux so that'll force them to.
[01:11:37] <vsync> shoving is raspberry pi there is just stupid
[01:11:55] <vsync> shoving a*
[01:11:58] <anonnumberanon> It may also be superior for more intensive calculations for mapping.
[01:12:16] <vsync> i'm sure you'll get there
[01:13:00] <vsync> for "more intensive calculations for mapping" there even exists arm-based boards with imus, even up to cortex-m4 iirc
[01:13:54] <anonnumberanon> Out of six member I only have a decent programmer (will need to learn more C I feel) and another guy who works hard when you beat him hard enough. The raspi is to hopefully get any work out of them that I can.
[01:14:18] <anonnumberanon> (out of the other three who are clowns)
[01:14:50] <vsync> -m3, my bad. 72 MHz. Which will probably be easier than a god damn raspberry pi, because of the linux overhead (fucking jesus), you have way more of an accurate control over things
[01:14:58] <xrlk> ok
[01:15:00] <vsync> most likely outperform aswell
[01:16:12] <vsync> if you need a "raspberry pi" you better be doing computer vision stuff, it's the only application for it that i can come up with off the top of my head
[01:16:35] <vsync> and i'm quite not sure you'll get there
[01:16:55] <anonnumberanon> I'll try to jam everything in the AVR/AVRs and if that's not enough, move up from there. I did buy a stm32discoveryF4 to come to the rescue in case doing fast things for flight on Linux is a bad idea(which it may be but a guy did it for his project by modifying something in the OS, maybe kernel stuff).
[01:17:11] <xrlk> is computer vision like opencv
[01:18:06] <vsync> i'm just gonna leave this here
[01:23:02] <anonnumberanon> Again I'm at the phase of writing software and burning it to the chip right now. I don't know yet how much power we'll need.
[01:24:28] <anonnumberanon> I was thinking of simulating a 14 to 18 megahertz frequency on my computer while running the programs on it, to see if the output speed would be close to what I need.
[01:27:18] <anonnumberanon> (to what I need, in order to usefully use the amount of data provided by the sensors, also depending on the ranges of the data the flight controller actually needs to process)
[01:34:04] <hypermagic> youtube: from GNU hurd, few clicks > japan earthquake > waving bridge > tsunami > russian maffia road raging > ISIS ...
[01:37:37] <anonnumberanon> hypermagic, no man you should be using Liveleak for these topics
[01:39:16] <hypermagic> i was just clicking recommended videos lol
[01:39:35] <hypermagic> you know, stuff related...
[01:40:10] <anonnumberanon> Did you end up on that part of Youtube again.
[01:40:22] <hypermagic> yes
[01:40:39] <anonnumberanon> here, come back:
https://www.youtube.com/watch?v=_PkDfSvx8EQ
[01:40:43] <hypermagic> catching fish with bare hands, and robber shooting himself in the head
[01:40:55] * anonnumberanon pulls hard on the rope of sheepness
[02:17:51] <Mr_Sheesh> much join/quit there
[02:17:58] <Thrashbarg> lots
[17:18:23] <anonnumberanon> Is there a good technical analysis of the overhead of Arduino Uno versus a standalone Atmega328p, with faster crystals, with the same crystal, with the Arduino bootloader, without the Arduino bootloader?
[17:19:30] <LeoNerd> What sort of overhead would you be expecting?
[17:24:58] <anonnumberanon> I've heard of a little bit of flash memory used that is somewhat large, also the Arduino functions may be too large or slow, or the run speed may not be good. But I literally don't know.
[17:25:46] <LeoNerd> Well, any bootloader consumes some amount of flash space, sure..
[17:26:49] <anonnumberanon> For example I have been using analogWrite() wondering if it is actually a fast implementation of whatever timer characteristics actually uses from the microcontroller.
[17:27:07] <anonnumberanon> For running motors with PWM.
[17:27:11] <LeoNerd> Oh well now you're into Arduino wrappers vs. other ideas
[17:27:18] <LeoNerd> But that has nothing to do with the board setup
[17:27:49] <anonnumberanon> I think this won't be a limitting factor (to do PWM) but when I get into calculations from sensor data, that's when I will need power.
[17:29:15] <anonnumberanon> LeoNerd, yes I'm especially worried about the Arduino libraries vs straight C libraries, and the way they implement their setup{} and loop{}.
[17:29:29] <LeoNerd> Er.. -that- part is trivial
[17:29:39] <LeoNerd> int main() { setup(); while(1) loop(); }
[17:30:38] <anonnumberanon> I know yeah, I can write C programs. I'm not too practiced on structs and pointers yet though, even though I know how to use them I haven't used them yet.
[17:31:00] <anonnumberanon> So what part is non trivial?
[17:31:20] <LeoNerd> Well, some of the wrappers I guess
[17:31:25] <LeoNerd> None of them are that big though..
[17:33:00] <tpw_rules> anonnumberanon: that isn't really a sensible comparison
[17:33:44] <tpw_rules> i use an arduino uno hardware but just C and asm and avrdude. you can do the other way around too, make your own "arduino" with just an atmega on a breadboared
[17:34:14] <tpw_rules> all of the basic math functions are gonna be the same speed
[17:34:21] <LeoNerd> I write straight C on my Arduino Nano
[17:34:31] <LeoNerd> I only have it for the convenience of the physical form-factor
[17:34:46] <tpw_rules> yeah i reeeealy don't like the IDE and envrionment in general
[17:35:01] <tpw_rules> the bootloader i use consumes 512 bytes so it doesn't really matter
[17:35:21] <tpw_rules> but i think it's a bit gobbly on RAM, though the same areas of concern apply to C
[17:35:48] <tpw_rules> like PROGMEM and stuff. but i think c++ vtables and junk are more overhead
[17:35:57] <LeoNerd> Mmmm
[17:36:04] <anonnumberanon> doing your own memory management helps with ram?
[17:36:06] <LeoNerd> Yah; I just write C, and not C++ on mine
[17:36:14] <tpw_rules> well c++ and arduino just need more of it
[17:36:24] <tpw_rules> i think trying to use a heap on 2K of ram is ultimately futile
[17:36:27] <tpw_rules> but that's my own opinion
[17:36:46] <tpw_rules> what sort of calculations will you be doing? simple math functions will be identical to C
[17:37:03] <tpw_rules> and the only way to beat them will be to write very well optimized assembly
[17:38:35] <tpw_rules> probably most/all of the complex ones too, math.h is straight from gcc afail
[17:38:38] <tpw_rules> afaik
[17:38:54] <anonnumberanon> well for the easier stuff (I think), Kalman filter implementations from a gyro and accelero board, then actual navigation/mapping/robot vision (not sure yet if those are the same thing) from data coming from a 360 degree lidar sensor outputting a LOT of data.
[17:39:24] <tpw_rules> um. i think doing that on a 16 mhz 8 bit processor is gonna be hard
[17:39:39] <tpw_rules> just from sounding it
[17:40:02] <anonnumberanon> basically one distance reading for every degree angle, at about 4 rotations per second
[17:40:46] <tpw_rules> can you even suck in that much data? good luck doing much with it. though that would be about 16k instrutions per data point, though complex math gets real slow real fast
[17:42:21] <anonnumberanon> tpw_rules, I may be able to use lookup tables to trade off for calculations if I do data logging first and map everything.
[17:42:26] <anonnumberanon> ??
[17:42:33] <tpw_rules> you only have 32K rom space
[17:42:40] <tpw_rules> i think you're trying to do far too much for an atmega328p
[17:43:12] <tpw_rules> i can't immediately suggest something suitable but it's probably not a bare arduino uno
[17:44:48] <LeoNerd> One of the smaller ARMs maybe? 32bit, faster clock
[17:45:30] <tpw_rules> do they make them on microcontrollery boards?
[17:45:48] <tpw_rules> something like the y?n or whatever is stupid because you need an rtos, not linux
[17:52:13] <Lambda-Aurigae> anonnumberanon, here is a quick one
http://pastebin.com/dSRSxgax
[17:53:19] <anonnumberanon> resultant code is from line 17 to end of file?
[17:53:39] <Lambda-Aurigae> yes.
[17:53:42] <Lambda-Aurigae> there are two.
[17:53:49] <Lambda-Aurigae> native example and resultant code
[17:53:56] <Lambda-Aurigae> then arduino example and resultant code.
[17:54:06] <Lambda-Aurigae> that wiring interface is fucking horrid.
[17:54:39] <Lambda-Aurigae> many of the arduino libraries are just as bad.
[17:57:02] <hypermagic> hello my friends
[17:57:09] <hypermagic> what are you creating today?
[17:57:19] <Lambda-Aurigae> trouble.
[17:57:37] <anonnumberanon> Lambda-Aurigae, that's pretty dramatic.
[17:58:05] <Lambda-Aurigae> the whole arduino idea is awesome...the implementation is horrid.
[18:01:40] <anonnumberanon> Is it possible to virtualize an avr like 328p, and send it a virtualized data inputs through some pins, in order to do it all in a simulated environment so don't have to rely on the hardware?
[18:02:04] <Lambda-Aurigae> simulavr I think is still alive.
[18:02:09] <Lambda-Aurigae> but it's never been user friendly.
[18:02:11] <anonnumberanon> for LInux?
[18:02:23] <LeoNerd> I -believe- debugWire can do that, but I'm not really aware of any dW tools
[18:02:29] <LeoNerd> .oO( yet )
[18:02:44] <Lambda-Aurigae> https://gitorious.org/simavr
[18:03:14] <Lambda-Aurigae> LeoNerd, debugWire requires you have an actuall avr...I think he is talking about simulating completely on a PC.
[18:04:07] <anonnumberanon> Yes because I don't want to have to load the software onto the hardware every time I make the slightest change to test, as least for the beginning.
[18:04:34] <Lambda-Aurigae> well, you could just run the core of the code as a real linux application with a linux wrapper around it.
[18:05:16] <Lambda-Aurigae> I don't know that the simulators will give you realistic speeds as comparable to an actual avr.
[18:06:17] <anonnumberanon> Why wouldn't it? If it can't I don't know why that software would exist in the first place :)
[18:06:35] <Lambda-Aurigae> they might run too fast?
[18:06:47] <anonnumberanon> I wouldn't want that.
[18:06:50] <Lambda-Aurigae> I don't know..I haven't used one in years...just don't know if they are speed accurage.
[18:07:29] <Lambda-Aurigae> can't think of anybody who regularly talks about using a simulator really.
[18:08:03] <Lambda-Aurigae> what you are talking about doing is likely going to be a bit above the capabilities of an atmega328p though I would think.
[18:08:10] <anonnumberanon> Maybe people use avr studio on Windows. Looking into it right now.
[18:08:28] <Lambda-Aurigae> windows....eeewwww.
[18:08:29] <Lambda-Aurigae> hehe.
[18:08:55] <anonnumberanon> Linux isn't perfect yet.
[18:09:26] <Lambda-Aurigae> I've been using linux exclusively for server and desktop at home for,,,13 years now.
[18:09:35] <Lambda-Aurigae> and windows isn't perfect yet either.
[18:09:36] <Lambda-Aurigae> nor mac.
[18:10:24] <anonnumberanon> To be honest I'm not interested in my thing magically working because I used powerful hardware and may or may not have gotten lucky. I want to see my hardware fail before upgrading and etc because otherwise I feel like I wouldn't really understand the limits of it.
[18:10:59] <Lambda-Aurigae> and no reason why you couldn't upload to the real hardware over and over...I do it all the time.
[18:11:06] <Lambda-Aurigae> 10K writes is a lot of writes to flash.
[18:11:59] <Lambda-Aurigae> and for projects where I do a lot of writing to the thing, like my foray into self-modifying code, I use an 8052 chip with external nvsram mapped to the program space.
[18:12:36] <anonnumberanon> I learned 8051 assembler in class. Was really neat.
[18:12:58] <Lambda-Aurigae> I find avr assembly easier than 8051.
[18:13:18] <Lambda-Aurigae> but, no 8bit avr chips can execute code from external memory.
[18:14:33] <Lambda-Aurigae> if avr had that and hardware usb in a dip package they would be perfect.
[18:24:39] <anonnumberanon> Lambda-Aurigae, what is self-changing code good for?
[18:26:53] <aandrew> Lambda-Aurigae: that's exactly where I was until my wife got me an 11" air for christmas a few years ago
[18:27:05] <aandrew> now I'm osx on the desktop. I miss aspects of linux on the desktop but not enough to blow away osx
[18:27:56] <Lambda-Aurigae> I hate osx!
[18:28:27] <Lambda-Aurigae> anonnumberanon, it's called computer learning in one incarnation....the program tries things and makes modifications to itself and tries again..
[18:29:00] <Lambda-Aurigae> the core of osx is awesome being bsd unix.
[18:29:06] <Lambda-Aurigae> the interface just bugs me no end.
[18:32:07] <anonnumberanon> "Please note that the speed of the simulator is very slow compared to the real chip, so it would probably be advisable to reduce/ignore delays when simulating"
[18:32:25] <anonnumberanon> Yeah okay I think I may save time just writing a simulator environment.
[18:33:45] <Lambda-Aurigae> that one I posted is only one of several out there.
[18:34:08] <anonnumberanon> simulavr?
[18:34:49] <anonnumberanon> since it's a command line tool with a lot of options It's probably not good for my use
[18:35:03] <Lambda-Aurigae> simavr is also command line tool with lots of options.
[18:35:14] <Lambda-Aurigae> all linux based avr simulators will be so.
[18:35:25] <anonnumberanon> I thought that was the only on that you posted.
[18:35:31] <Lambda-Aurigae> only gui one I know of is avrstudio.
[18:35:41] <Lambda-Aurigae> I posted link to simavr I think.
[18:37:23] <anonnumberanon> I plan to simulate data input at 115200 baud into the program, then set my environment to run at 18MHz by measuring how long it takes avr to calculate cos( x ) a thousand times and how long it takes on the computer and then finding the ratio and adding a delay for each loop. Finally I'll write the calculation code and see if I can get anything done.
[18:37:58] <Lambda-Aurigae> have lots of fun.
[18:38:00] <hypermagic> Lambda-Aurigae, they can, if you hack them
[18:38:16] <hypermagic> though it will not be that fast to do polymorphic code
[18:38:48] <hypermagic> and flash has limited number of writes and avr does not run code from ram :/
[18:38:59] <Lambda-Aurigae> hypermagic, what 8bit avr can execute code from external memory? You can run an interpreter and interpret code from sram or such..
[18:39:14] <Lambda-Aurigae> but not native code.
[18:39:41] <hypermagic> you may create polymorphic code hat rewrites itself from outside source if you want
[18:39:56] <Lambda-Aurigae> well, yeah, you could rewrite flash I suppose.
[18:40:04] <Lambda-Aurigae> but, yeah, it will wear out flash pretty fast.
[18:40:20] <Lambda-Aurigae> hence using an 8052 chip with an external parallel nvsram.
[18:41:44] <anonnumberanon> Lambda-Aurigae, yes, enough tears, time for some fun!
[18:42:08] <Lambda-Aurigae> fun here always.
[18:43:04] <anonnumberanon> I worry too much. Maybe cause not knowing if I'll get hired anywhere when I graduate.
[18:43:27] <Lambda-Aurigae> I don't worry about anything.
[18:43:29] <hypermagic> anonnumberanon, you might be interested in my choice of a higher performer device i chosen recently for myself too
[18:43:32] <anonnumberanon> I'm also worried about wether or not I should worry.
[18:43:33] <Lambda-Aurigae> I just deal with it as it comes.
[18:43:38] <anonnumberanon> :)
[18:44:25] <hypermagic> i use atmega168 too, but it has limitations :)
[18:44:41] <hypermagic> ATSAM3S1C is a faster thingy
[18:44:43] <Lambda-Aurigae> my most used chip in the avr world is the atmega1284p
[18:44:53] <Lambda-Aurigae> ds89c450 in the 8052 world
[18:44:54] <hypermagic> and still cheap
[18:45:22] <Lambda-Aurigae> and the pic32mx250f128b for the pic32 world..which is far faster than either avr or 8052.
[18:45:32] <anonnumberanon> hypermagic, do they have it in dip package or is it part of a dev board?
[18:45:57] <hypermagic> oh no, this is a 100 pin LQFP device
[18:46:07] <hypermagic> but you can make a breadboard...
[18:46:15] <hypermagic> solder wires to whatever
[18:46:24] <anonnumberanon> hypermagic> but you can make a breadboard...
[18:46:28] <anonnumberanon> lol
[18:46:53] <anonnumberanon> Man that would distract me from my project.
[18:50:02] <anonnumberanon> hypermagic, maybe the algorithms I need would require an order or orders of magnitude more power than my current 16 mghz. I'll make it a priority to see what power I need then.
[18:51:12] <hypermagic> i don't know what are you up to but 64MHz ARM sounds good
[18:51:32] <hypermagic> it has hardware division too
[18:51:42] <hypermagic> 1 tick
[18:52:29] <xrlk> ok
[19:01:20] <anonnumberanon> sounds good man, I'll check what I need, gonna write a program this evening that works with sensor data, actually may only have time to write a program that simulates a long data log of sensor data..
[19:04:18] <hypermagic> maybe you need Gigahertz speed cpu ?
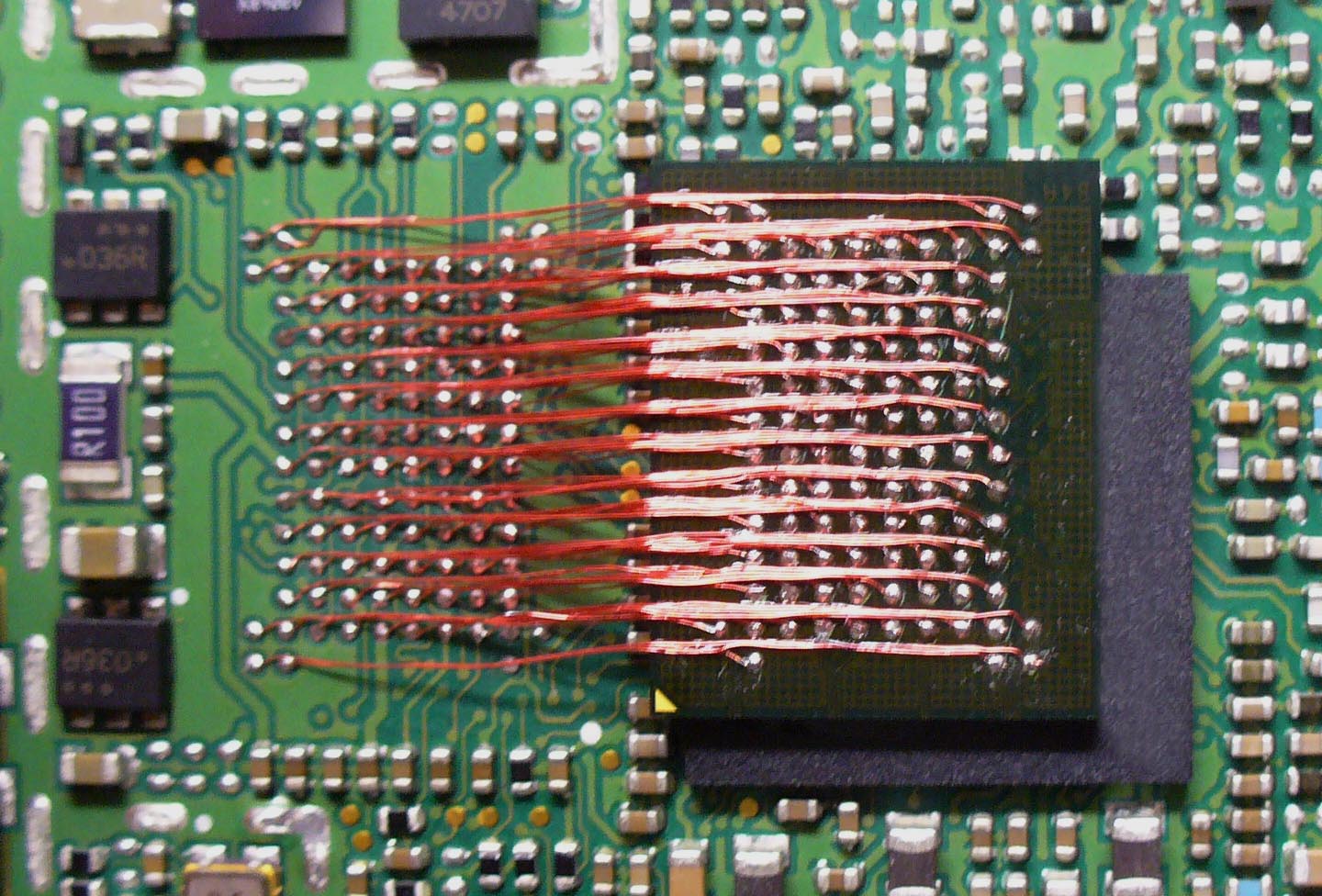
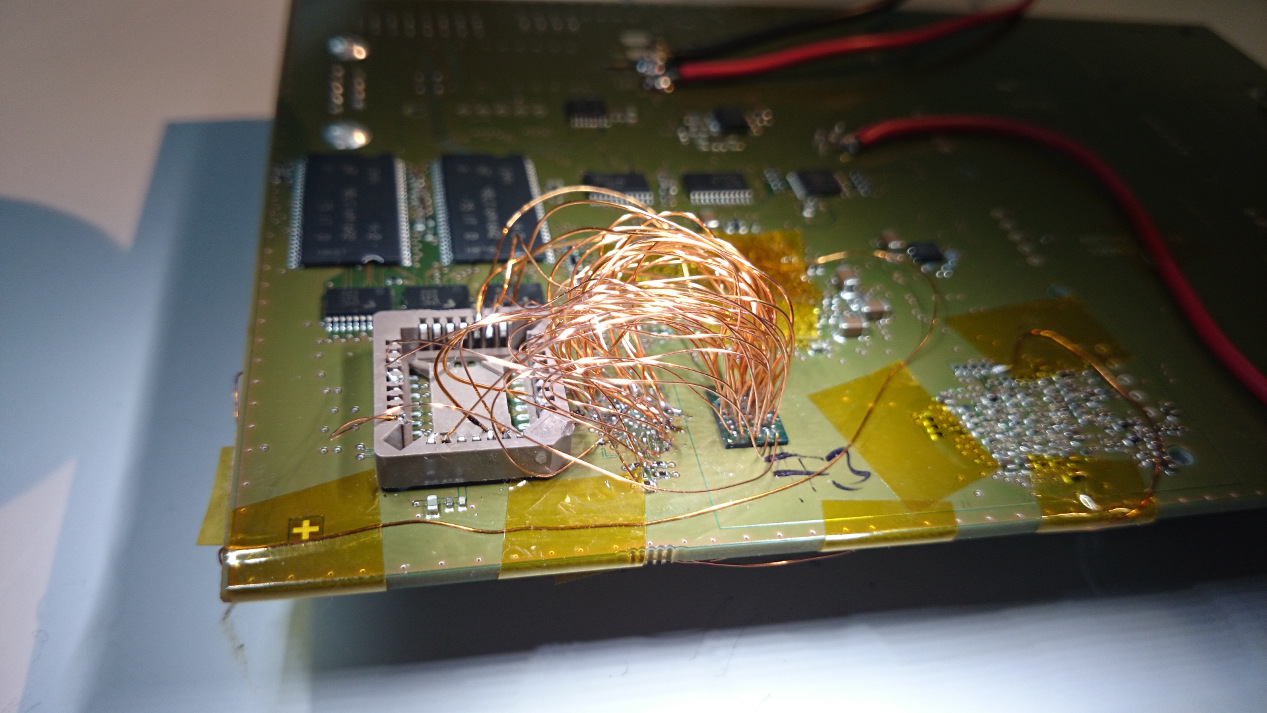
[19:06:02] <hypermagic> anonnumberanon, some magic ^^ deadbug style
http://www.tayloredge.com/museum/mymuseum/electronics/deadbug.jpg http://www.thekirchners.net/rebol.jpg
[19:07:56] <hypermagic> http://www.jsykora.info/wp-content/uploads/2015/01/DSC_0221_web.jpg
[19:09:33] <hypermagic> http://www.eevblog.com/forum/projects/dead-bug-soldering-a-9-ball-bga-chip-featured-on-hack-a-day-too!/?action=dlattach;attach=54509;image
[19:13:03] <anonnumberanon> i love soldering
[19:13:22] <hypermagic> oh you will love deadbug prototyping bga then :)
[19:13:43] <hypermagic> you only need 100 tiny wires for the 100 pin bga and 200 soldering
[19:14:15] <anonnumberanon> I'd need one of those monocular goggles and a very fine point iron.
[19:21:13] <hypermagic> EEVblog #181 - Dead Bug Prototype Soldering
https://www.youtube.com/watch?v=q53uPn1mKc0
[19:24:38] <hypermagic> neat SDHC to bga hack
http://i.imgur.com/2T5f4.jpg
[20:31:47] <learath> hypermagic: that's way too many pins....
{kind=link}
{kind=link}
{kind=link}
{kind=link}